х io
Изобретение относится к транспортному машиностроению, а именно к контейнеровозам, снабженным погрузочно- разгрузочным оборудованием.
Цель изобретения - расширение функциональных возможностей путем повышения грузоподъемности и производительности при погрузочно -разгру- зочных работах.
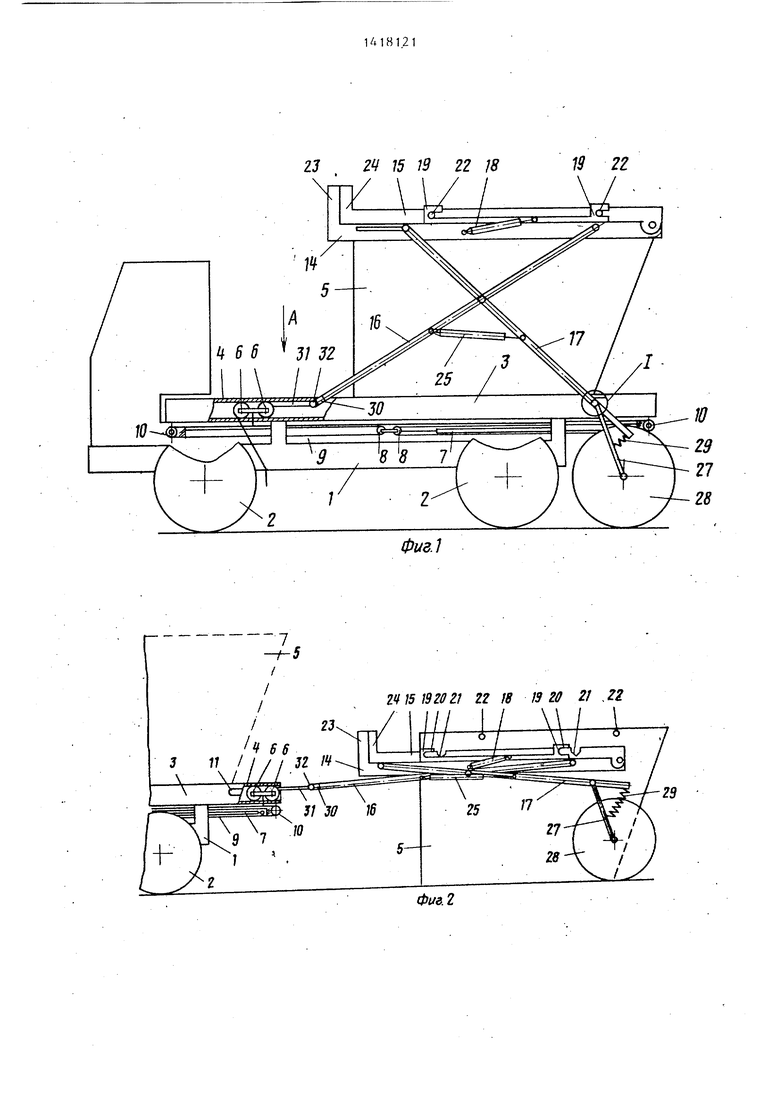
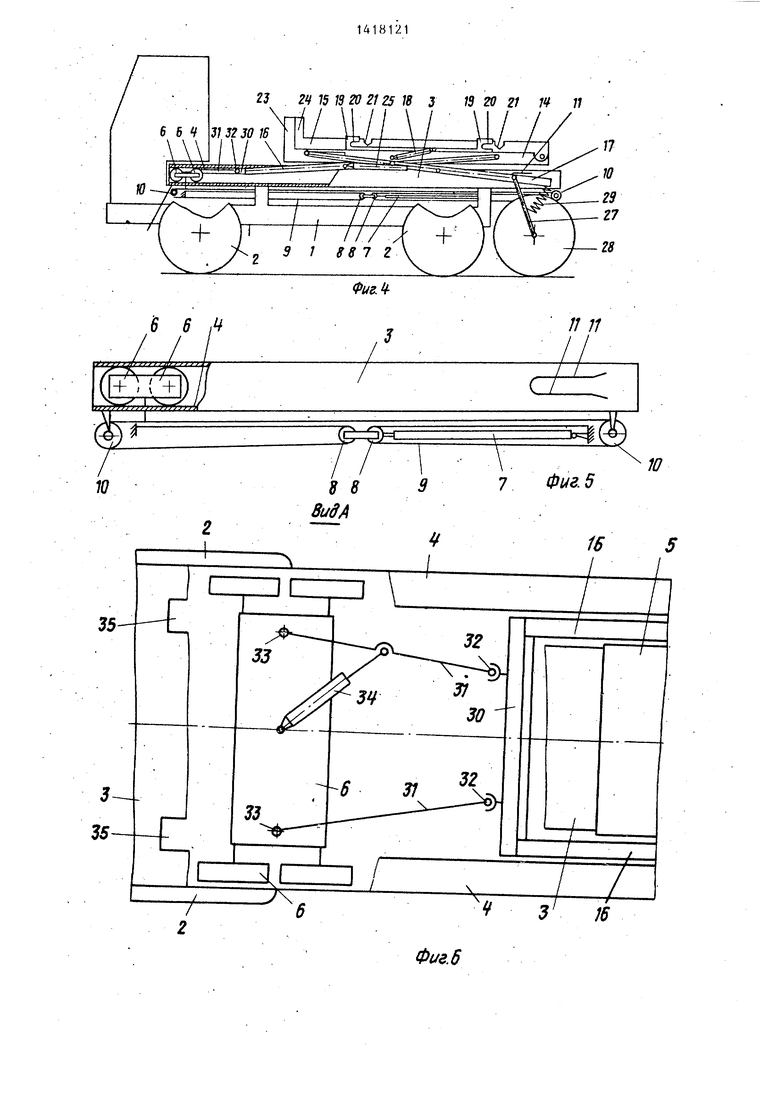
На фиг. 1 схематично изображен контейнеровоз с одним контейнером в транспортном положении, вид сбоку; на фиг. 2 - то же, в момент установки (съема) контейнера; на фиг. 3- то же, с двумя контейнерами в транспортном положении; на фиг. 4 - тоже, без контейнера в транспортном положении; на фиг. 5 - механизм перемещения тележки,
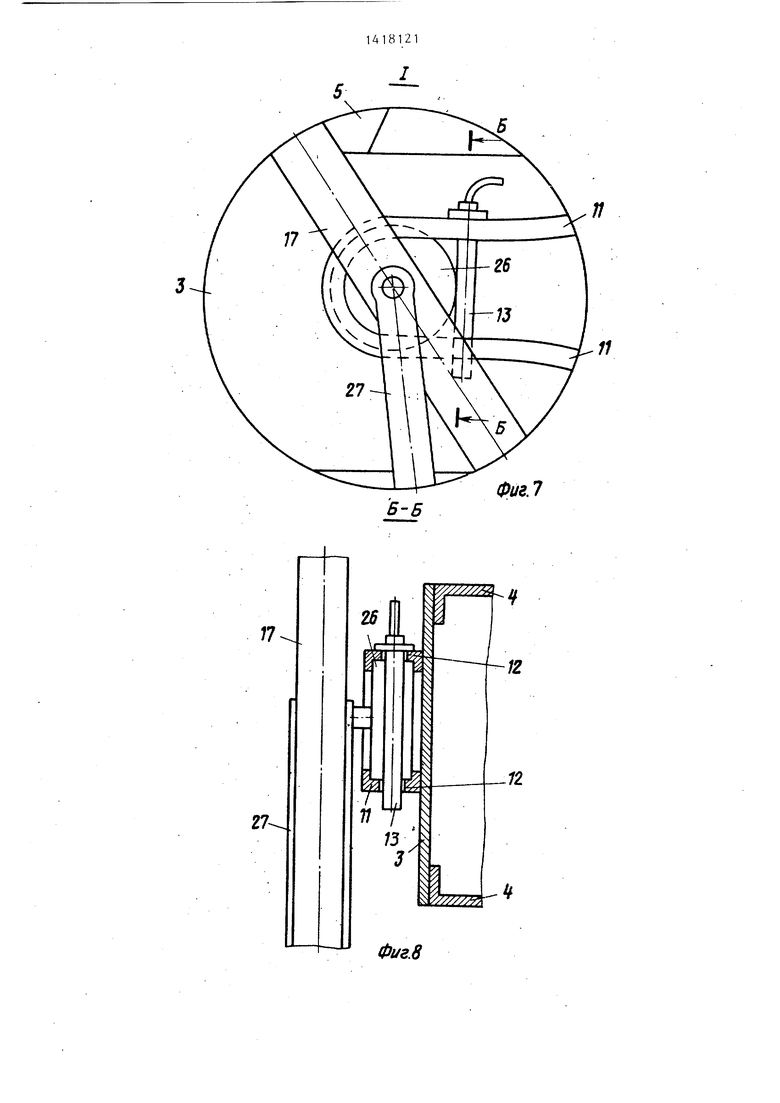
., вид сбоку; на фиг. 6 - вид А на фиг. 1; на фиг. 7 - узел I на
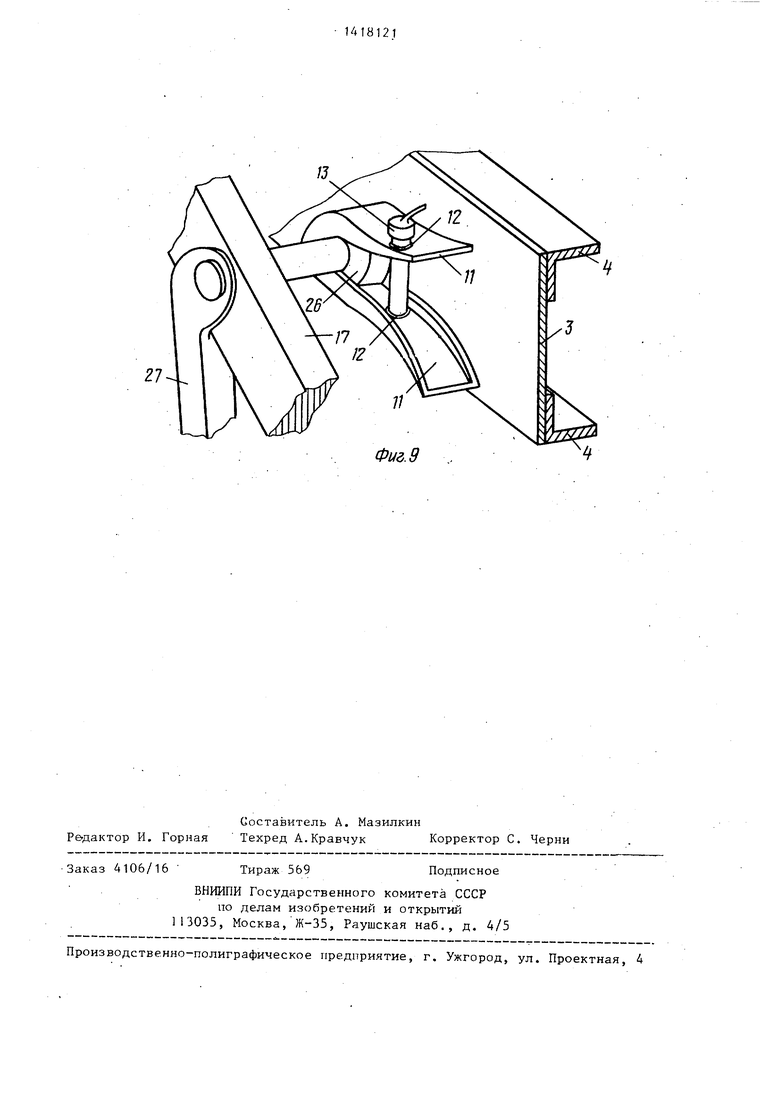
фиг. 1; на фиг.. 8 -.сечение Б-Б на фиг. 7; на фиг. 9 - ловитель и фиксатор, изометрия.
Контейнеровоз содержит раму 1, установленную на колесах 2. На раме
Iзакреплена грузовая платформа 3 с продольными боковыми направляющими 4. Грузовая платформа 3, представляющая собой площадку для установки контейнера 5, снабжена замками в виде подвижных ползунов, которые замыкают и размыкают контейнер 5 при установке
и снятии его с грузовой платформы 3 . В продольных боковых направляющих 4 установлена каретка 6, которая передвигается с помощью привода перемещения, включающего гидроцилиндр 7, .полиспаст 8, трос 9 и блоки 10. На грузовой платформе 3 закреплены ловители
IIв виде открытых шарниров с фиксаторами. Каждый фиксатор выполнен из отверстия 12, в котором размещен палец 13. Каретка 6 кинематически связана с погрузочно-разгрузочным оборудованием, состоящим из П-образ- ной рамы, включающей подъемную 14 и поворотную 15 рамки, Х-образных рычагов 1Ь и 17 типа нюрнбергских ножниц . Подъемная 14 и поворотная 15 рамки шарнирно соединены и дополнительно связаны между собой гидроцилиндрами 18. Поворотная рамка 15 снабжена запорными устройствами, состоящими из соединенных между собой подвижных звеньев -19 с вырезами 20.
.На поворотной рамке. 15 выполнены посадочные места 21 под пальцы 22 контейнера 5. Лонжероны подъемной 14
0
5
0
5 Q
и поворотной 15 рамок соединены между собой поперечинами 23 и 24, выполненными в виде вертикальных П-образных дуг.
Рычаги t6 и 17 кинематически связаны с подъемной рамкой 14 вращательными и поступательными парами, а между собой - приводами подъемных мехаQ низмов из гидроцилиндров 25, На
задних нижних концах рычагов 17 шарнирно установлены ролики 26 и радиальные подвески 27 с дополнительными ходовыми колесами 28. Рычаги 17
5 и подвески 27 дополнительно связаны пружинами 29. Рычаги 16 соединены между собой поперечиной 30, кинематически связанной шарнирными тягами 31 с кареткой 6 с образованием шарнирного четырехзвенника. Шарнирные тяги 3 соединены с поперечиной 30 с помощью универсальных шарниров .32, а с кареткой 6 - с помощью шарниров с вертикальной осью 33 вращения. Одна из шарнирных тяг 31 дополнительно связана с кареткой 6 и снабжена приводом поворота -из гидроциt- .
линдра 34. На грузовой платформе 3 выполнены прорези 35 для прохода рычагов 16.
В процессе эксплуатации контейнеровоза возникает необходимость в периодической самопогрузке и разгрузке контейнеров.
Контейнеровоз работает следующим образом.
При самопогрузке контейнеров с находящимся в транспортном положении погрузочно-разгрузочным оборудованием маневрирует задним ходом к установленному на грунте , гружен.ому контейнеру 5 и, не доезжая к нему, останавливается. При этом штоки гидроцилиндров 7 и 18 втянуты, гидроци- 5 линдров 25 выдвинуты, а шток гидро- ЦИЛИНДР& 34 находится в промежуточном положении. Посадочные места 21 поворотной рамки 15 свободны от подвижных звеньев 19 запорного устройства. Ролики 26 рычагов 17 зафиксированы в ловителях 11 пальцами 13. После остановки контейнеровоза вынимают пальцы 13 из отверстий 12 ловителей 11. Выдвигая шток гидроцилиндра 7 через полиспаст 8, трос 9 и.блоки 10, перемещают назад каретку 6 и погрузочно- разгрузочное оборудование, освобождая грузовую платформу 3. Дополнительные ходовые колеса 28 перекатываются по
0
5
314
грунту, ролики 26 выходят из контакта с ловителями 11, а подъемная 14 и поворотная 15 рамки охватывают контейнер 5. Гидроцилиндр 34 .удерживает П-обраэную раму от поперечных перемещений относительно продольноц оси контейнеровоза. Перемещение погрузоч- но-разгрузочного оборудования осуществляется до контакта поперечины 24 поворотной рамки 15 с контейнером 5. При этом пальцы 22 контейнера 5 уста- навливаются над посадочными местами 21 .поворотной рамки 15. Затем гидроцилиндрами 25 осуществляют подъем П-образной рамы, захватывая посадочными местами 21 поворотной рамки 15 пальцы 22 контейнера 5. Последний поднимают на -высоту, обеспечивающую его свободное перемещение над грузовой платформой 3. Одновременно гидроцилиндрами 18 перемещают подвижные звенья 19 запорного устройства до сопряжения вырезов 20 с пальцами 2 контейнера 5. Далее гидроцилиндрами 7, втягивая их штоки, перемещают вперед каретку 6 и погрузочно-разгрузоч- ное оборудование с груженым контейнером 5 по продольным боковым направляющим 4 грузовой платформы 3. При этом дополнительные ходовые колеса 28 перекатываются по грунту, а ролики
26рычагов 17 входят в сопряжение
с ловителями 11 грузовой платформы 3,
после чего прекращают перемещение каретки 6.
Фиксирующие пальцы 13 устанавливают в отверстия 12 ловителей 11. Рукоятку управления гидроцилиндрами 25 на распределителе гидросистемы контейнеровоза устанавливают в плавающее положение и, перемещая гидроцилиндром 7 каретку 6 вперед, опускают П-.образную раму с контейнером 5 до контакта его днища с грузовой платформой 3. Контейнер 5 прижимается к грузовой платформе 3.П-образной рамой и дополнительно фиксируется на грузовой платформе 3 с ломощью подвижных ползунов. Дополнительные ходовые колеса 28 воспринимают часть нагрузки от контейнеровоза, погру- зочно-разгрузочного оборудования и груженого коктёйнера 5. Подвески
27и пружины 29 обеспечивают плавность хода крнтейнеровоза ,по неровностям дороги.
Контейнеровоз транспортирует груженый контейнер 5 к месту назначе
18121
5
0
Q 5
0
5
0
5
0
5
ния, где осуществляется его саморазгрузка. Саморазгрузка может выполняться путем снятия груженого контейнера 5 с контейнеровоза и установки его на площадке или путем выгрузки груза из контейнера 5. Съем последнего с контейнеровоза и . установка его на грунт осуществляются в обратной последовательности.
Выгрузка груза из контейнера 5 осуществляется следующим образом. Рукоятку распределителя, управляющую гидроцилиндром 7, переводят в плавающее положение. Гидроцилиндрами 25 поднимают П-образную раму с контейнером 5 над грузовой платформой 3, и гидроцилиндрами 18 опрокидывают поворотную рамку 15 с зафиксированным на ней контейнером 5. После выгрузки груза контейнер 5 транст портируют к месту загрузки, где его снимают с контейнеровоза и устанавливают на грунт.
Контейнеровоз может транспортиро-, вать два контейнера. Самопогрузка первого контейнера 5 на грузовую платформу 3 осуществляется аналогично указанному. Но при этом ролики 26 рычагов 17 и пальцы 22 контейнера 5 не фиксируют соответственно в лови- теляЗ 1 1 грузовой платформы 3 и в посадочных местах 21 поворотной рам-- ки 15. После установки контейнера 5 на грузовую платформу 3 с помощью гидроцилиндров 25 опускают П-образную раму до разобщения пальцев 22 контейнера 5 с посадочными местами 21 поворотной рамки 15. Далее гидроцилиндром 7 перемещают каретку 6 с погрузочно-разгрузочным оборудованием назад. Ролики 26 вьшодят из сопряжения с ловителями 11, а П-образ- ная рама перемещается относительно контейнера 5, охватывая его пальцы 22 поперечинами 23 и 24 подъемной 14 и поворотной 15 рамок. После переме- - щения каретки 6 в крайнее положение с помощью гидроцилиндров 25 опускают П-образную раму в нижнее положение. Рукоятку управления гидроцилиндром 34 на распределителе гидросистемы контейнеровоза переводят в плавающее положение.
Контейнеровоз маневрирует к установленному на грунте второму контейнеру 5 так, чтобы продольные оси контейнеровоза , погрузочно-разгрузочно- го оборудования и контейнера 5 сов5 .1
пали. После этого полости гидроцилиндра ЗА запираются, а контейнеровоз, двигаясь задним ходом, охватывает второй.контейнер 5 П-образной рамой. Движение контейнеровоза осуществляется до контакта поперечины 24 поворотной рамки 15 с контейнером 5. Затем гидроцилиндрами 25 осуществляют подъем П-образной рамы, захватывая посадочными местами 21 поворотной рамки 15 пальцы 22 контейнера 3 и поднимая его. Контейнер 5 поднимают на высоту, обеспечивающую необходимый транспортный просвет между днищем и грунтом. Одновременно гидроцилиндрами 18, перемещая подвижные звенья 19 запорного устройств до сопряжения вырезов 20 с пальцами 22 контейнера 5, фиксируют контейнер 5 на поворотной рамке 15. Рукоятку управления гидроцилиндром 34 на распределителе гидросистемы контейнеровоза переводят в плавающее положение и контейнеровоз транспортирует два груженых кoнт,eйнepa 5 к месту назначения:, где осуществляется их саморазгрузка. Шарнирная кинематическая связь погрузочно-разгрузочного оборудования с тележкой контейнеровоза обеспечивает копирование погрузочно- разгрузочному оборудованию траектори движения контейнеровоза и позволяет использовать контейнеровоз в качестве автопоезда. При этом полностью используется грузонесущая способность контейнеровоза и погрузочно- разгрузочного обору;,ования.
Саморазгрузка контейнеров может 1выполняться также путем снятия гру- гженых контейнеров с погрузочно-раз- грузочного оборудования и контейнеровоза и путем выгрузки груза из кон216
тейиеров и осуществляется аналогично указанному.
Формула изобретения
1.Контейнеровоз, содержащий грузовую платформу с продольными боковыми направляющими, два подъемных механизма типа нюрнбергских ножниц
с приводами, каретку, установленную в указанных направляющих, связанную с передними нижними концами рычагов указанных механизмов, и подъемную П-образную раму, смонтированную на
верхних концах рычагов подъемных механизмов, отличающийся тем, что, с целью расширения функциональных возможностей путем повьппе- нйя грузоподъемности и производительности при погрузочно-разгрузоч- ных работах,, он снабжен дополнительными ходовыми колесами, смонтированными на задних нижних концах рычагов подъемных механизмов, приводы
подъемных механизмов щарнирно закреплены между рычагами каждого подъемного механизма,а каретка связана с приводом ее.леремещения относительно продольных боковых направляющих платформы,
которая снабжена ловителями с фиксаторами задних нижних концов рычагов.
2.Контейнеровоз по п, 1, отличающийся тем, что нижние передние концы рычагов подъемных механизмов связаны поперечиной, соединенной шарнирными тягами с.кареткой с образованием между поперечиной, кареткой и щарнирными тягами шарнирного четырехзвенника, а тяги связаны
с кареткой с возможностью перемещения в горизонтальной плоскости, при этом одна из указанных тяг связана с приводом поворота относительно каретки.
2J . 2 15 19 22 18
| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнеровоз | 1987 |
|
SU1507611A2 |
| Контейнеровоз | 1981 |
|
SU992261A2 |
| Контейнеровоз | 1984 |
|
SU1194725A1 |
| Транспортное средство для перегрузки контейнеров | 1985 |
|
SU1271774A1 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
| Транспортное средство со съемным контейнером | 1987 |
|
SU1416348A1 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
| Контейнеровоз | 1980 |
|
SU921903A2 |
| Контейнеровоз | 1978 |
|
SU691316A1 |
| КОНТЕЙНЕРОВОЗ | 1995 |
|
RU2112669C1 |
Изобретение относится к транспортному машиностроению, а именно к контейнеровозам, снабженным погру- зочно-разгрузочным оборудованием. Цель изобретения - расширение функциональных возможностей путем повьшения грузоподъемности и производительности при погрузочно-разгрузочных работах. Контейнеровоз содержит раму 1 на колесах 2. На раме закреплена грузовая платформа 3 с продольными боковыми , направляющими 4, в которых смонтированы ролики каретки 6, соединенной с приводом перемещения. Ролики установлены на нижних концах задних рычагов 17 и контактируют с л.овителями и фиксаторами в виде пальцев, вставляемых в отверстия. Дополнительные ходовые колеса 28 установлены на задних нижних концах рычагов 17.Каретка 6, поперечина 30 и шарнирные тяги 31 образуют шарнирный четырехзвенник, снабженный приводом от гидроцилиндра, закрепленного одним концом на каретке 6, а другим - на одной из шарнирных тяг 31. 1 з.п. ф-лы, 9 ил. S (Л
Физ.
Zf 15 J920Z1 22 18 19 ZO 2J ,22
Фиг. 2
23 гц 15 1920 2125 18 J /5 20 21 7V П
71 S2 30 IB
Фиг. 6
17
г 6-Б
Фиг.7
Фиг.8
Физ.9
| Контейнеровоз | 1981 |
|
SU992261A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
