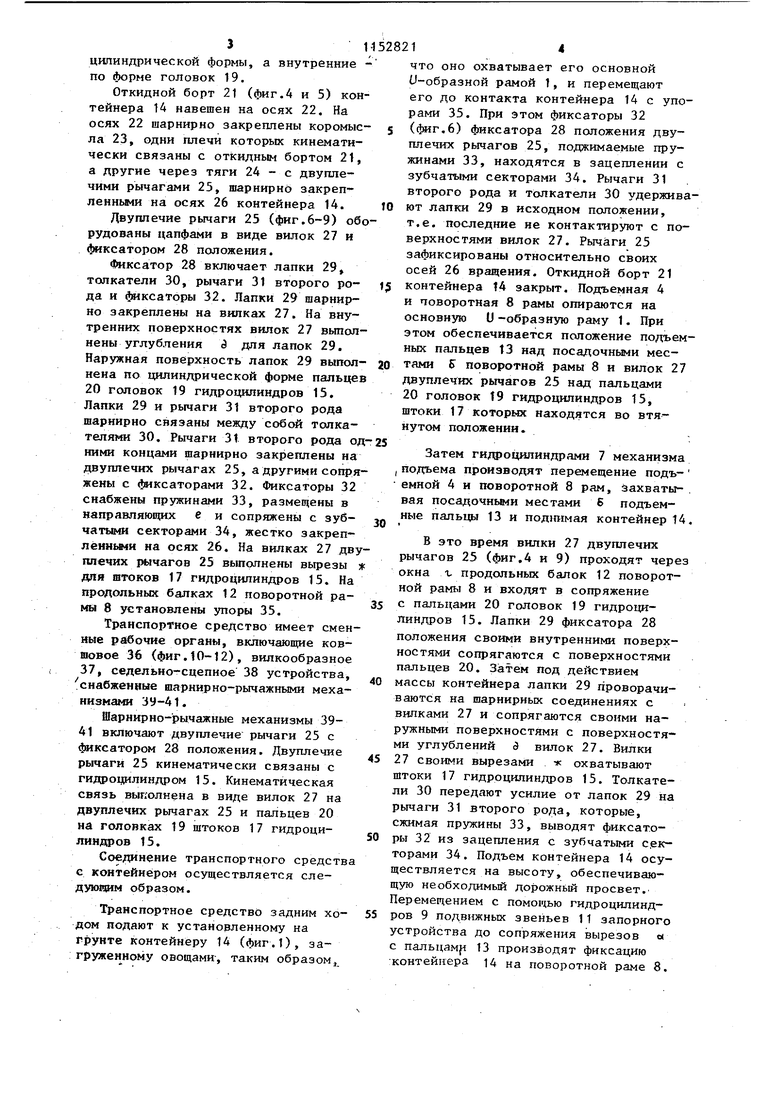
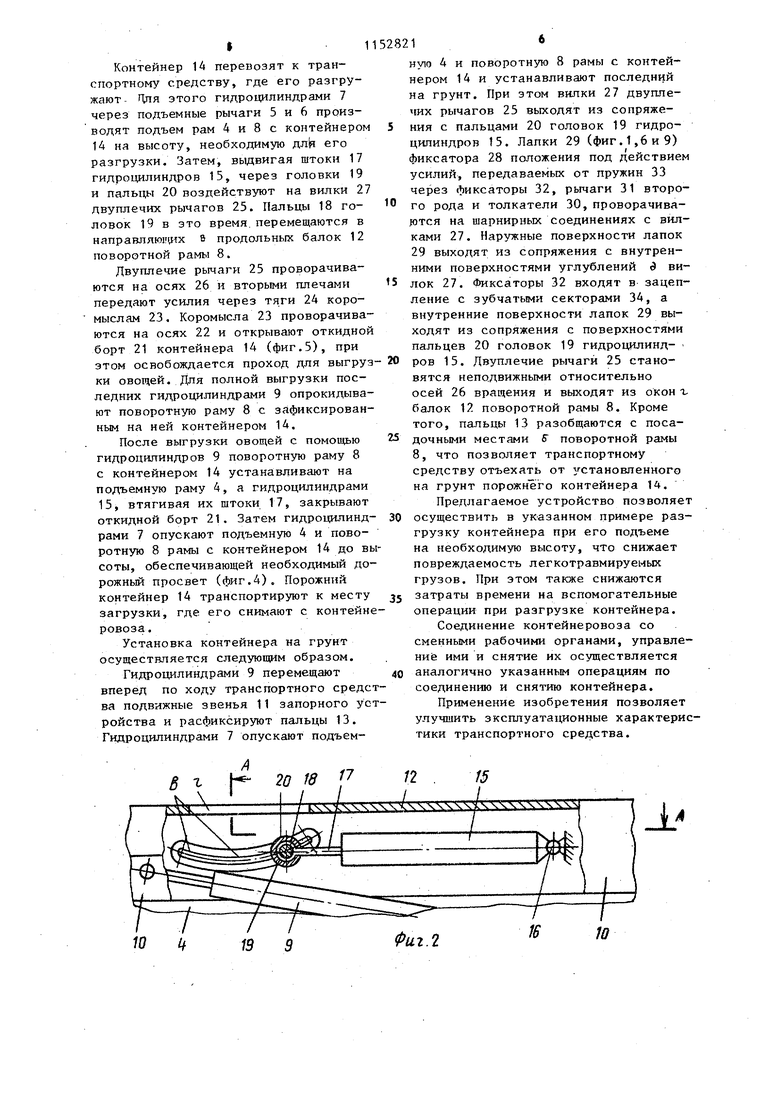
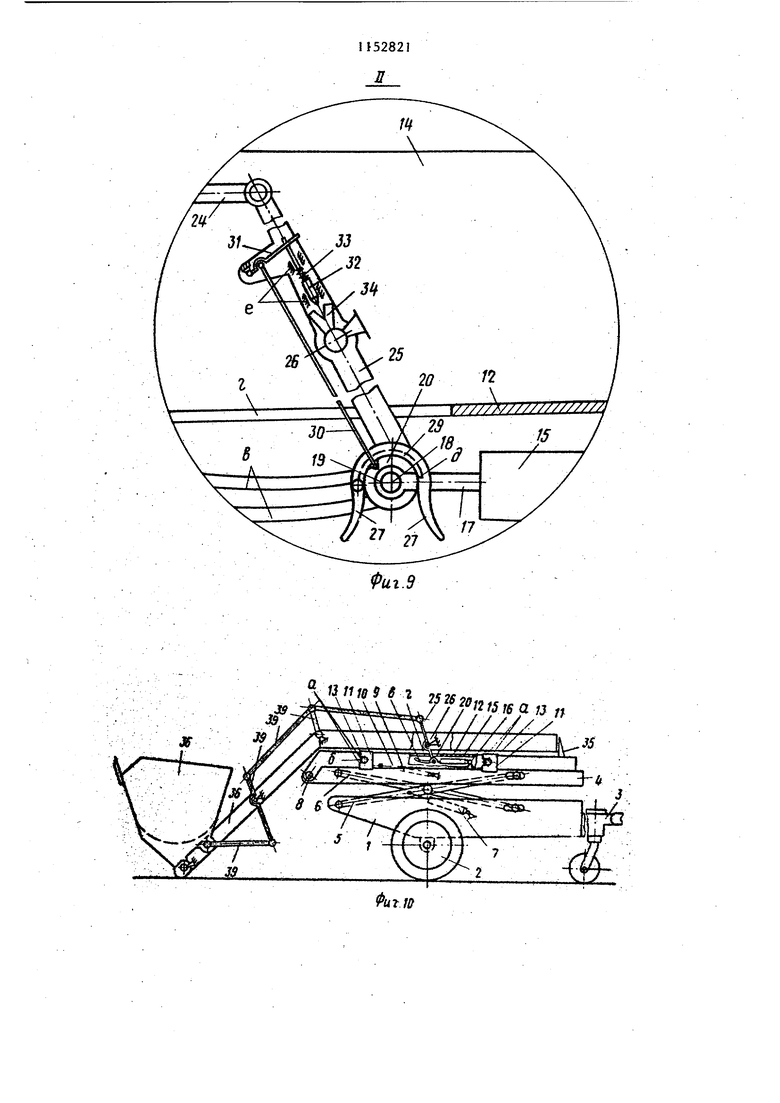
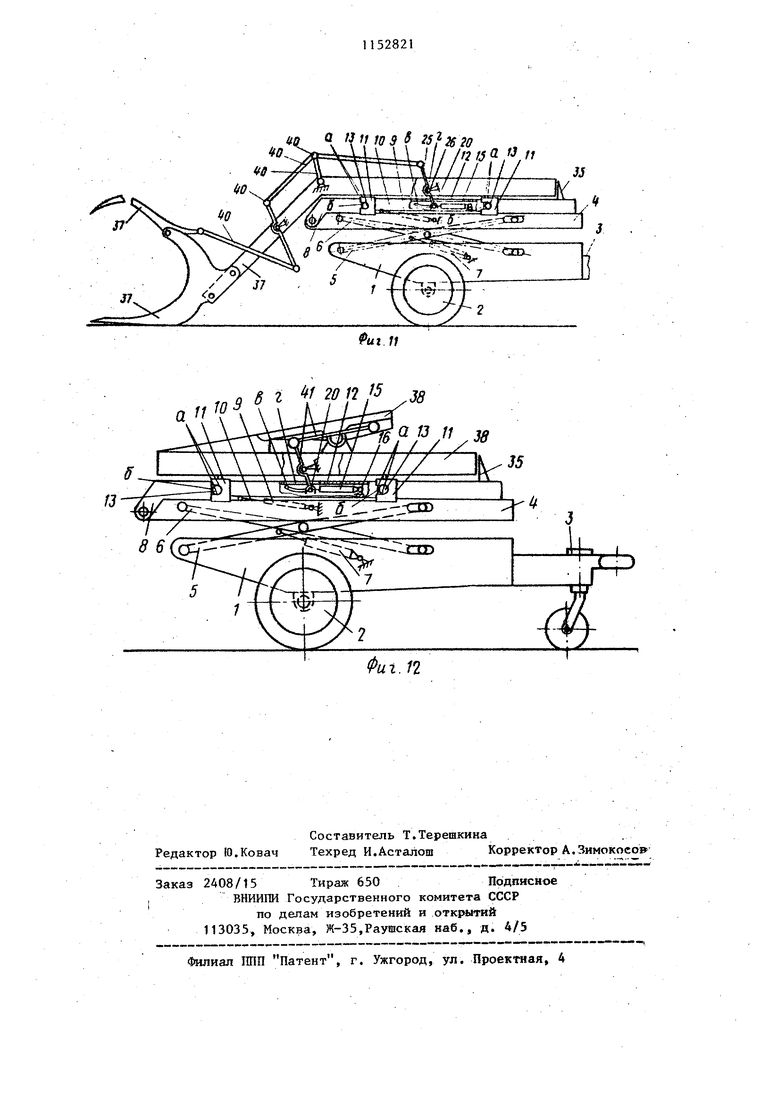
Изобретение относится к сельскохозяйственному макниностроению, в частности к подъемно-транспортному оборудованию, используемому для погрузки, перегрузки и перевозки различных грузов. Известно транспортное средство, преимущественно для перевозки контейнеров с откидным бортом и сменных рабочих органов, содержащее опи рающуюся на тележку основную U -образную раму, связанную с последней подъемную и-образную раму и шарнирно присое/1иненкую к последней поворотную Lf-образную раму с польми продольными балками Cl 1Однако данное устройство характеризуется недостаточньми эксплуатационными возможностями, а именно невозможностью управления рабочими органами в процессе эксплуатации, Цель изобретения - улучшение эксплуатационных возможностей транспортного средства. Указанная цель достигается тем, что транспортное средство, преимущественно для перевозки контейнеров с откидныч бортом и сменных рабочих органов, содержащее опирающуюся на тележку основную и-образную раму, связанную с послед ней подъемную и-образную раму и шарнирно присоединенную к последней поворотную и-образную раму с полы ми продольными балками, снабжено жестко укрепленными внутри продоль ных балок поворотной и-образной рамы дугообразными направляющими,шар .нирно укрепленными своими корпусами также внутри указанных продольных балок ,гидро1щдиндрами, на штоках которы установлены пальцы, размещенные в указанных направляющих, закрепляем на контейнерах и сменных рабочих органах шарнирно-рычажным механизмом привода поворота соответственн откидного борта и рабочих органов, установленным с возможностью соеди нения с пальцем, и фиксатором поло жения шарнирно-рычажного механизма На фиг.1 схематично изображено транспортное средство перед устано кой на него конте шера, вид сбокуi на фиг.2 - продольная балка поворо ной рамы, вид сбоку, на фиг.З - ра рез А-А на фиг.2; на фиг.4 - транспортное средство с контейнером в транспортном положении после его фиксации,- на фиг.5 - то же, при открытом борте контейнера} на фиг.6 узел I на фиг.1; на фиг.7 - вид Б на фиг.6; на фиг.8 - сечение В-В на фиг.6; на фиг.9 - узел Н на фиг.4, на г.10 - транспортное средство с ковшовым устройством, вид сбокуi на фиг.11 - то же, с вилкообразным устройстве }на фиг.12;- то же, с седельно-сцепньм устройством. Транспортное средство включает основную и-образную раму 1 (фиг.1) с ходовыми колесами 2 и спицей 3. Сверху на основной U-образной раме 1 расположена подъемная U -образная рама 4, соединенная с ней механизмсм подъема, состоящим из подъемных рычагов 5 и 6 и гидроципиидров 7. Подъемные рычаги 5 и 6 шар|Нирно соединены между собой и кинематически связаны нижними концами с основной U-образной рамой 1, а верхними - с подъемной рамой 4. Кроме того, подъемные рычаги 5 шарнирно связаны с основной U-образной рамой 1 через гидроципиндры 7. Связь подъемных рычагов 5 и 6 с основной и-образной рамой 1 и подъемной рамой 4 выполнена в виде вращательных и поступательнь1х кинематических пар. На подъемной,раме 4 шарнирно установлена поворотная и -образная рама 8, кинематически связанная с ней механизмом опрокидывания, состоящим из гидроцилиндров 9. Поворотная рама 8 снабжена запорными устройствами, состояррши из соединенных тягами 10 подвижных звеньев 11 с вырезами « , охватывающих продольные балки 12 по-, воротной рамы 8. Тяги 10 запорных устройств через гидроцилиндры 9 кинематически связаны с подъемной рамой 4. В поворотной раме 8 выполнены посадочные места S в виде вьфезов под пальцы 13 контейнера 14. Внутри балок 12 (фиг.2 и 3) поворотной рамы 8 шарнирно установлены гид- роцилинлры 15 на осях 16, а их штоки 17 снабжены пальцами 18. Пальцы 18 сопряжены с.дугообразньми- направляющими 6 5 выполненными в балках 12. На балках 12 поворотной рамы 8 выполнены окна г , На головках 19 штоков 17 гндроцилиндров 15 закреплены папьвдл 20, наружные части которых выполнены цилиндрической формы, а внутренние по форме головок 19. Откидной борт 21 (фиг.4 и 5) кон тейнера Н навешен на осях 22. На осях 22 шарнирно закреплены коромыс ла 23, одни плечи которьсх кинематически связаны с откидным бортом 21, а другие через тяги 24 - с двуплечими рычагами 25, шарнирно закрепленн№1И на осях 26 контейнера 14. Двугшечие рычаги 25 (фиг.6-9) об рудованы цапфами в виде вилок 27 и фиксатором 28 положения. Фиксатор 28 включает лапки 29 толкатели 30, рычаги 31 второго рода и йиксаторы 32. Лапки 29 шарнирно закреплены на вилках 27. На внутренних поверхностях вилок 27 выпол нены углубления д ДЛЯ лапок 29. Наружная поверхность лапок 29 выпол нена по цилиндрической форме пальце 20 головок 19 гидрощшиндров 15. Лапки 29 и рычаги 31 второго рода шарнирно связаны между собой толкателями 30. Рычаги 31 второго рода о ними концами шарнирно закреплены на двуплечих рычагах 25, а другими сопря жены с фиксаторами 32. Фиксаторы 32 снабжены пружинами 33, размещены в направляющих е и сопряжены с зубчатьй4И секторами 34, жестко закреплённьми на осях 26. На вилках 27 дв плечих рычагов 25 выполнены вьфезы ДО1Я штоков 17 гидроцкпиндров 15. На продольных балках 12 поворотной рамы 8 установлены упоры 35. Транспортное средство имеет смен йые рабочие органы, включающие ковшовое 36 (фиг.10-12), вилкообразное 37, седельно-сцепное 38 устройства, снабженные шарнирно-рычажными механизмами ЗУ-41. Шарнирно-рычажные механизмы 3941 включают двуплечие рычаги 25 с фиксатором 28 положения. Двуплечие рычаги 25 кинематически связаны с гидроцилиндром 15. Кинематическая связь выполнена в виде вилок 27 на двуплечих рычагах 25 и пальцев 20 на головках 19 штоков 17 гидроцилиндров 15. Соединение транспортного средств с контейнером осуществляется следую дам образом. Транспортное средство задним ходом подают к установленному на грунте контейнеру 14 (фиг.1), загруженному овощами, таким образом. что оно охватывает его основной U-образной рамой 1, и перемещают его до контакта контей-нера 14 с упорами 35. При этом фиксаторы 32 (г.6) фиксатора 28 положения двуплечих рычагов 25, по,цжимаемые пружинами 33, находятся в зацеплении с зубчатыми секторами 34. Рычаги 31 второго рода и толкатели 30 удерживают лапки 29 в исходном положении, т.е. последние не контактируют с поверхностями вилок 27. Рычаги 25 зафиксированы относительно своих осей 26 вращения. Откидной борт 21 контейнера 14 закрыт. Подъемная 4 и поворотная 8 рамы опираются на основную и-образную раму 1. При этом обеспечивается положение подъемных пальцев 13 над посадочными местами Б поворотной рамы 8 и вилок 27 двуплечих рычагов 25 над пальцами 20 головок 19 гидроцилиндров 15, штоки 17 которых находятся во втянутом положении. Затем гидроцилиндрами 7 механизма подъема производят перемещение подъ- емной 4 и поворотной 8 рам, захваты- , вая посадочными местами б подъемные пальцы 13 и поднимая контейнер 14. В это время вилки 27 двуплечих рычагов 25 (фиг.4 и 9) проходят через окна -и продсшьных балок 12 поворотной рамы 8 и входят в сопряжение с пальцами 20 головок 19 гидроцилиндров 15. Лапки 29 фиксатора 28 положения своими внутренними поверхностями сопрягаются с поверхностями пальцев 20. Затем под действием массы контейнера лапки 29 проворачиваются на шарнирных соединениях с випками 27 и сопрягаются своими наружными поверхностями с поверхностями углублений д вилок 27. Вилки 27 своими вырезами ж охватывают штоки 17 гидррцилиндров 15. Толкатели 30 передают усилие от лапок 29 на рычаги 31 второго рода, которые, сжимая пружины 33, выводят фиксаторы 32 из зацепления с зубчатыми с.екторами 34. Подъем контейнера 14 осуществляется на высоту, обеспечивающую необходимый дорожньй просвет. Перемещением с помощью гидроцилиндров 9 подвижных звеньев 11 запорного устройства до сопряжения вырезов «х с пaльцaмf 13 производят фиксацию :контей1гера 14 на поворотной раме 8. I Контейнер 1A перевозят к транспортному средству, где его разгружают - Цпя этого гидроцилиндрами 7 через подъемные рычаги 5 и 6 производят подъем рам 4 и 8 с контейнером 14 на высоту, необходимую дл|я его разгрузки. Затем, выдвигая штоки 17 гидроцилиндров 15, через головки 19 и пальцы 20 воздействуют на вилки 27 двуплечих рычагов 25. Пальцы 18 головок 19 в это время, перемещаются в направляюи их в продольных балок 12 поворотной рамы 8. Двуплечие рычаги 25 проворачиваются на осях 26 и вторыми плечами передают усилия через тяги 24 коромыслам 23, Коромысла 23 проворачиваются на осях 22 и открывают откидной борт 21 контейнера 14 (фиг,5), при этом освобождается проход для выгруз ки овощей. Для полной выгрузки последних гидроцилиндрами 9 опрокидывают поворотную раму 8 с зафиксированным на ней контейнером 14, После выгрузки овощей с помощью гидроцилиндров 9 поворотную раму 8 с контейнером 14 у с та на; вливаю т на подъемную раму 4, а гидроцилиндрами 15, втягивая их штоки 17, закрывают откидной борт 21, Затем гидроцилиндрами 7 опускают подъемную 4 и поворотную 8 рамы с контейнером 14 до вы соты, обеспечивающей необходимый дорожный просвет (фиг,4). Порожний контейнер 14 транспортируют к месту загрузки, где его снимают с контейне ровоза. Установка контейнера на грунт осуществляется следующим образом. Гидроцилиндрами 9 перемещают вперед по ходу транспортного средст ва подвижные звенья 11 запорного уст ройства и расфиксируют пальцы 13. Гидроцилиндрами 7 опускают подъем16ную 4 и поворотную 8 рамы с контейнером 14 и устанавливают последний на грунт. При этом вилки 27 двуплечих рычагов 25 выходят из сопряжения с пальцами 20 головок 19 гидроцилиндров 15, Лапки 29 (фиг,1,6 и 9) фиксатора 28 положения под действием усилий, передаваемых от пружин 33 через фиксаторы 32, рычаги 31 второго рода и толкатели 30, проворачиваются на шарнирных соединениях с вилками 27, Наружные поверхности лапок 29 выходят из сопряжения с внутренними поверхностями углублений Э вилок 27, Фиксаторы 32 входят в зацепление с зубчатыми секторами 34, а внутренние поверхности лапок 29 выходят из сопряжения с поверхностями пальцев 20 головок 19 гидроцилинд- ров 15, Двуплечие рычаги 25 становятся неподвижными относительно осей 26 вращения и выходят из окон г. балок 12 поворотной рамы 8. Кроме того, пальцы 13 разобщаются с посадочными местами Г поворотной рамы 8, что позволяет транспортному средству отъехать от установленного на грунт порожнёго контейнера 14, Предлагаемое устройство позволяет осуществить в указанном примере разгрузку контейнера при его подъеме на необходимую высоту, что снижает повреждаемость легкотравмируемых грузов. При этом также снижаются затраты времени на вспомогательные операции при разгрузке контейнера. Соединение контейнеровоза со сменными рабочими органами, управление ими и снятие их осуществляется аналогично указанным операциям по соединению и снятию контейнера. Применение изобретения позволяет улучшить эксплуатационные характеристики транспортного средства.
а W
ФчгЛ
А-А
15 /2 W
W
Фи.г.3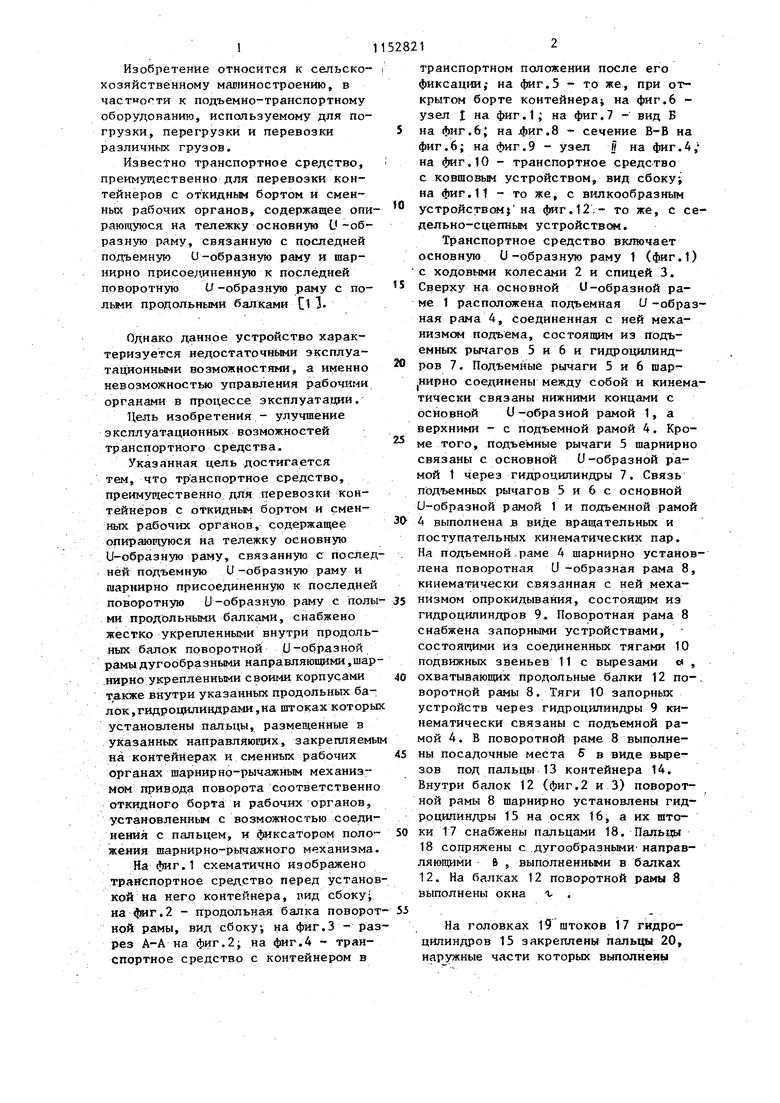
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство | 1985 |
|
SU1320095A1 |
| Транспортное средство со съемным контейнером | 1987 |
|
SU1416348A1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2325792C1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2006 |
|
RU2329629C1 |
| СЪЕМНИК НАДБУКСОВЫХ НАКЛАДОК | 2004 |
|
RU2277052C1 |
| Кузов транспортного средства для перевозки легковесных грузов | 1983 |
|
SU1142323A1 |
| Устройство для изготовления предварительно напряженных железобетонных изделий | 1983 |
|
SU1135885A1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2327328C1 |
| КОНТЕЙНЕРОВОЗ | 1995 |
|
RU2112669C1 |
| Контейнеровоз | 1980 |
|
SU921903A2 |
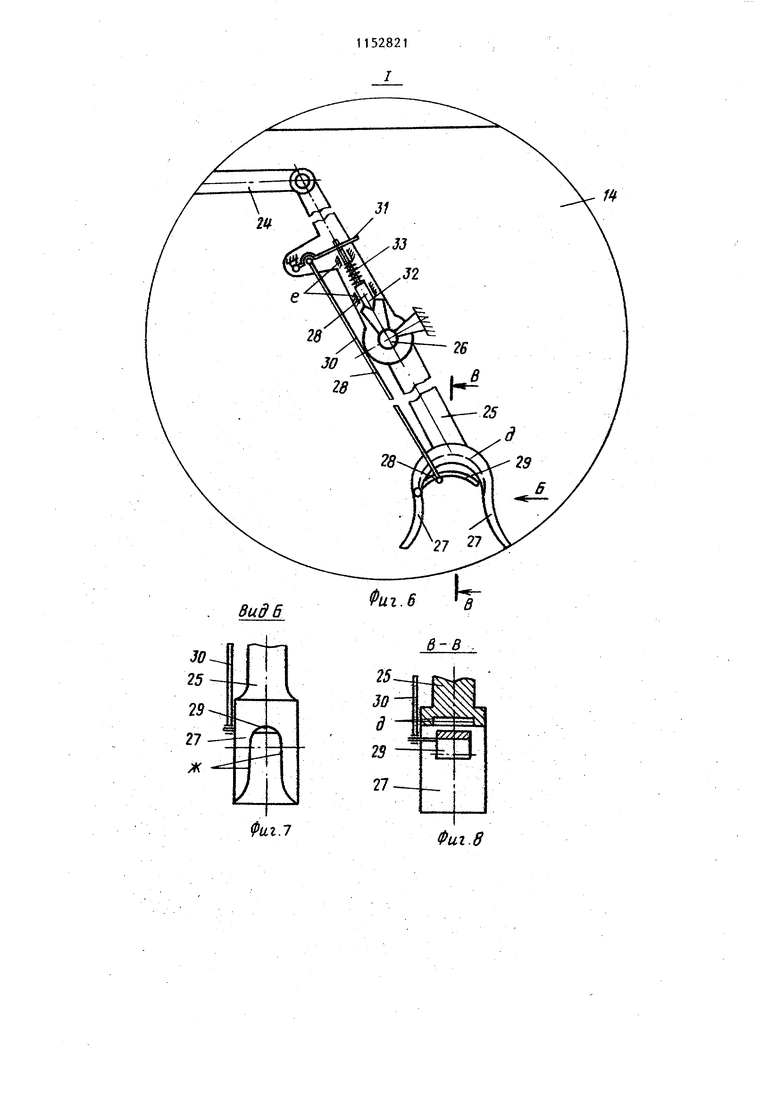
ТРАНСПОРТНОЕ СРЕДСТВО, преимущественно для перевозки контейнеров с откидным бортом и сменных рабочих органов, содержащее опирающуюся на тележку основную U-образную раму, связанную с последней подъемную и -образную раму и шарнирно присоединенную к последней поворотную и-образную раму с польми продольными балками, отличающееся тем, что, с 1елью улучшения эксплуатационных возможностей, оно снабжено жестко укрепленными внутри продольных балок поворотной U-образной рамы дугообразными направляю щими, шарнирно укрепленными своими корпусами также внутри указанных продольных балок, гидроцилиндрами, на штоках которых установлены пальцы размесцённью в указанньсх направляющих, закрепляемым на контейнерах и сменных рабочих органах шарнирнорычажным механизмом привода повороW та соответственно откидного борта и рабочих органов, установленным с возможностью соединения с пальцем, i и фиксатором положения шарнирно-рычажного механизма. /« full
Вид 6 / Фиг.в гТв-В
23 27
Фаг.7
Фиг.8 S 13f11ff9S I S,pU,,
Фиг.З f f f/2/J;,(r;j „ О tJjjiQS S 25}. S г V / / / J5 Фиг.П /jfl/- r; / /7 V. Л IJ . л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контейнеровоз | 1980 |
|
SU921903A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
