Изобретение относится к области железнодорожного транспорта и может быть использовано для измерения вертикальных неровностей в заданном диапазоне их длины.
Наиболее близким по технической сущности к заявляемому устройству аналогом является выбранное в качестве прототипа устройство для контроля неровностей на поверхности катания рельса, содержащее последовательно связанные датчик вертикальных ускорений, усилитель, двукратный интегратор с фильтрами верхних частот, имеющими разные амплитудно-частотные характеристики, и блок регистрации. Устройство снабжено датчиком скорости, программируемым дешифратором, релейным переключателем и сумматором; при этом выходы интеграторов соединены с контактами релейного переключателя, вход которого через программируемый дешифратор соединен с датчиком скорости, выход подключен к входу сумматора, выходом соединенного с блоком регистрации [1].
Недостатками известного аналога являются следующие:
1. Устройство не позволяет измерять неровности рельсового пути в заданном диапазоне длин, поскольку в нем определена только максимальная длина неровностей. Минимальная длина неровностей не определена, а зависит от скорости движения вагона-путеизмерителя.
2. Применение программируемого дешифратора, релейного переключателя и сумматора значительно усложняет аналог и снизило его надежность.
3. В аналоге отсутствует защита датчика ускорений от вредных высокочастотных вибраций букс, имеющих большие амплитуды, что снижает надежность их работы и уменьшает точность измерений неровностей пути.
Техническом результатом изобретения является создание устройства для измерения вертикальных неровностей в заданном диапазоне длин, в частности от 2 до 5 м, которые оказывают существенное влияние на динамику порожних грузовых вагонов и устойчивость от схода с рельсов.
Для достижения этого технического результата было создано устройство для контроля неровностей рельсового пути, содержащее датчик скорости, последовательно соединенный со скоростемером, и соответственно для каждой рельсовой нити последовательно связанные датчик вертикальных ускорений буксы, масштабный усилитель, блок вычисления вертикальных траекторий букс, блок вычисления вертикальных траекторий букс включают в себя несколько каналов измерения траекторий с различными частотными характеристиками, каждый из которых соответствует интервалу рабочих скоростей и содержит последовательно включенные фильтр нижних частот, двукратный интегратор и фильтр верхних частот, причем выход масштабного усилителя соединен со входами фильтров нижних частот, а выходы фильтров верхних частот и выходы цифрового скоростемера соединены с входами бортовой электронной вычислительной машины, предназначенной для выброса измерения траектории букс по скорости движения вагона путеизмерителя и привязки получаемых данных к пути.
Для обеспечения амортизации и защиты от высокочастотных вибраций датчики ускорений крепятся к буксам в корпусах.
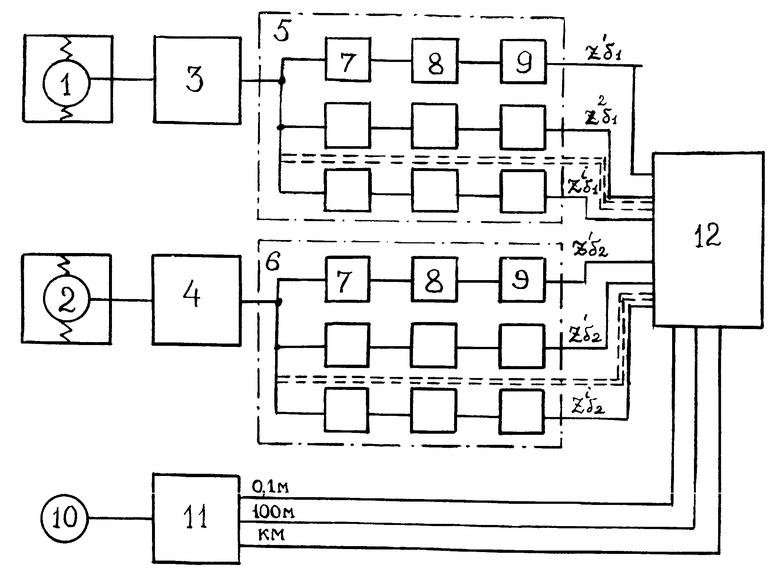
На чертеже изображена блок-схема устройства.
Устройство содержит: датчики 1 и 2 ускорений, установленные на буксах колесной пары и фиксирующие вертикальные ускорения букс, вызванные неровностями пути. Для защиты от высокочастотных вибраций букс, вызванных короткими неровностями рельсов, датчики 1 и 2 помещены в корпуса, имеющие соответствующие амортизатора, в виде упругих элементов; масштабные усилители 3 и 4, которые обеспечивают необходимые масштабы измерения ускорений букс; блоки вычислений вертикальных траекторий букс 5 и 6. Каждый из блоков 5 и 6 содержит несколько, параллельно включенных каналов измерения траекторий букс с различными амплитудно-частотными характеристиками; датчик скорости 10, выдающий определенное количество импульсов за оборот колеса; цифровой скоростемер 11, который выдает импульсы через 0,1 м, 100 м, 1 км; бортовую ЭВМ 12, ведущую обработку данных и привязку их к пути.
Каждый канал измерения траекторий букс содержит фильтр нижних частот 7, ограничивающий измерение минимальной длины неровностей; двукратный интегратор 8; фильтр верхних частот 9, ограничивающий измерение максимальной длины неровностей.
Весь диапазон рабочих скоростей вагона-путеизмерителя разбита на несколько интервалов. Каждому из них соответствует свой канал измерения траекторий букс.
На выходах блоков 5 и 6 образуются сигналы, соответствующие вертикальным траекториям букс ZS1 и ZS2, которые поступают на вход бортовой ЭВМ 12 для последующего анализа. Цифровой скоростемер 11 получает для своего функционирования импульсные сигналы от датчика скорости 10. Выходные кодовые сигналы скоростемера 112 поступают на бортовую ЭВМ и обеспечивают вычисление скорости движения для выбора нужных каналов измерения траекторий блоков 5 и 6, а также привязку к пути по пикетам и километрам.
Устройство работает следующим образом.
К буксам колесной пары вагона-путеизмерителя, колеса которого не имеют неровностей на поверхностях катания, крепят датчики ускорений 1 и 2. Корпуса креплений имеют амортизатора, защищающие датчики от высокочастотных вибраций букс, вызванных короткими неровностями рельсов. Оси чувствительности датчиков 1 и 2 ориентированы вертикально. При движении вагона по пути, имеющему вертикальные неровности, возникают ускорения, которые фиксируются датчиками ускорений 1 и 2. Сигналы с этих датчиков усиливаются и масштабируются блоками 3 и 4 и поступают на входы блоков 5 и 6 вычисления вертикальных траекторий букс. На их выходах образуются сигналы, пропорциональные траекториям движения букс ZS1 и ZS2 в вертикальной плоскости.
Указанные сигналы наряду с кодовыми сигналами скоростемера 11 поступают в бортовую ЭВМ 12, которая определяет скорость движения вагона, выбирает для обработки нужный канал измерения траекторий букс и осуществляет привязку получаемых данных к пути.
Экспериментальные исследования заявляемого устройства показали, что оно в отличие от прототипа обеспечивает с достаточной точностью измерение вертикальных неровностей пути в диапазоне от 2 до 5 м. Это позволило определить неблагоприятные для динамики порожних грузовых вагонов участки пути и дать соответствующие рекомендации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 1997 |
|
RU2134319C1 |
| Устройство для контроля неровностей на поверхности катания рельса | 1988 |
|
SU1504297A1 |
| ПУТЕИЗМЕРИТЕЛЬ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1971 |
|
SU312914A1 |
| Устройство для измерения вертикальных неровностей железнодорожного пути | 1983 |
|
SU1133324A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ НА ПОВЕРХНОСТИ КАТАНИЯ РЕЛЬСА | 1992 |
|
RU2035534C1 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВИЗНЫ РЕЛЬСА ПОД НАГРУЖЕННЫМ КОЛЕСОМ, ИЗГИБАЮЩЕГО МОМЕНТА, НАПРЯЖЕНИЙ ОТ ИЗГИБА РЕЛЬСА, ОТНОСИТЕЛЬНОЙ ЖЕСТКОСТИ И МОДУЛЯ УПРУГОСТИ ПОДРЕЛЬСОВОГО ОСНОВАНИЯ | 1994 |
|
RU2108423C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ РЕЛЬСОВ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1998 |
|
RU2143359C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2270774C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
Устройство содержит для каждой рельсовой нити последовательно связанные датчик вертикальных ускорений буксы, масштабный усилитель и многоканальный блок вычисления вертикальных траекторий букс, а также датчик скорости, последовательно соединенный с цифровым скоростемером, подключенным к бортовой электронной вычислительной машине, каждый канал вычисления вертикальных траекторий букс включает в себя фильтр нижних частот, двукратный интегратор и фильт верхних частот, а датчики ускорений могут быть помещены в корпусы для амортизации и защиты датчиков от высокочастотных вибраций. Устройство обеспечивает измерение вертикальных неровностей в заданном диапазоне длин. 1 з.п. ф-лы, 1 ил.