Изобретение относится к области железнодорожного транспорта и предназначено для контроля и оценки состояния железнодорожных путей.
Известен способ оценки состояния рельсового пути и устройство для его осуществления, при котором производят предстартовую калибровку датчиков измерения параметров радиусов-векторов от фокусов датчиков до точек, лежащих на верхних и внутренних боковых поверхностях головок рельсов, и запоминают данные калибровки, в процессе движения вагона-путеизмерителя циклически измеряют в реальном масштабе времени текущие значения пройденного пути, текущие значения силовых факторов динамического взаимодействия подвижного состава и рельсового пути, текущие значения высоты неровностей на поверхности катания рельсов, текущие значения параметров радиусов-векторов, текущие значения углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат вагона-путеизмерителя, полученные текущие значения запоминают, вычисляют комплекс геометрических параметров рельсового пути, проводят анализ и оценку его состояния и запоминают полученные результаты. (Патент РФ №2114950, кл. В 61 К 9/08, Е 01 В 35/00, 1997).
Данный способ оценки состояния рельсового пути реализуется устройством, содержащим два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленных на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленных на неподрессоренной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленных на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, и установленный на борту вагона-путеизмерителя контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину (ПЭВМ). (Патент РФ №2114950, кл. В 61 К 9/08, Е 01 В 35/00, 1997).
Недостатком известного способа оценки состояния рельсового пути и устройства, его реализующего, является недостаточная точность и достоверность контроля, так как измеряют только отклонения геометрических параметров рельсового пути от заданных, при этом число и вид измеряемых отклонений определяются количеством датчиков и размещением их на вагоне-путеизмерителе, а также наличие методической ошибки за счет малой жесткости вагона-путеизмерителя при контроле параметров рельсового пути с расположением датчиков на длинной базе.
Кроме того, недостатком известного способа оценки состояния рельсового пути и устройства его реализующего является синхронный съем информации с датчиков, которые по принципу своего действия являются асинхронными, вследствие чего происходит периодический набег фазовой ошибки.
Известен способ оценки состояния рельсового пути, при котором в процессе движения измерителя осуществляют квантованное измерение текущих значений пройденного пути, асинхронно к которому измеряют текущие значения вертикальных и поперечных горизонтальных ускорений кузова измерителя, а также левой и правой букс одной из его колесных пар, полученные значения запоминают. (Патент РФ №2074829, кл. В 61 К 9/08, Е 01 В 35/00, 1997).
Известно устройство для оценки состояния рельсового пути, содержащее датчик пройденного пути, формирователь пакетов исходных данных, выход которого соединен с первым входом накопителя, первый выход которого соединен с входом блока фильтров, а второй его выход является выходом устройства, пульт оператора, выход которого соединен с первым входом формирователя исходных данных и с вторым входом накопителя. (Патент РФ №2074829, кл. В 61 К 9/08, Е 01 В 35/00, 1997).
Недостатком известного способа оценки состояния рельсового пути, осуществляемого путем измерения геометрических параметров рельсового пути и их отклонений от заданных значений, является недостаточная достоверность. Недостатком устройства, реализующего известный способ, являются его высокая сложность и стоимость.
Способ оценки состояния рельсового пути и устройство, его реализующее по патенту №2074829 по общности решаемой задачи и основным признакам, является наиболее близким и выбран в качестве прототипа для обоих объектов изобретения.
Техническим результатом изобретения является создание способа оценки состояния рельсового пути, позволяющего при движении измерителя со скоростью до 250 км/час определить с высокой точностью и достоверностью величины ускорений, возникающих в основных элементах системы измеритель - путь и получить комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава.
Техническим результатом создания устройства, реализующего предлагаемый способ, являются его относительная простота и низкая стоимость.
Сущность изобретения заключается в том, что согласно способу оценки состояния рельсового пути, в процессе движения измерителя осуществляют квантованное измерение текущих значений пройденного пути, асинхронно к которому измеряют текущие значения вертикальных и поперечных горизонтальных ускорений кузова измерителя, а также левой и правой букс одной из его колесных пар, полученные значения запоминают, синхронно с квантованием пути определяют скорость движения измерителя вдоль пути, определяют для заранее заданной фиксированной скорости движения значения измеренных ускорений и их запоминают, определяют для заранее заданной фиксированной скорости движения значения вертикальных ускорений букс как результат дисбаланса и циклической некруглости колес и как результат воздействия на колеса вертикальных неровностей рельсового пути, определенные для фиксированной скорости движения значения ускорений сравнивают с допустимыми и определяют минимальное значение предельной скорости движения измерителя на конкретном участке рельсового пути.
Сущность изобретения заключается также в том, что в устройство для оценки состояния рельсового пути, содержащее датчик пройденного пути, формирователь пакетов исходных данных, выход которого соединен с первым входом накопителя, первый выход которого соединен с входом блока фильтров, а второй его выход является выходом устройства, пульт оператора, выход которого соединен с первым входом формирователя исходных данных и с вторым входом накопителя, введены три измерителя ускорений, определитель скорости, система бортового времени, блок масштабирования, определитель степени неровности пути, определитель степени некруглости колес, определитель интенсивности колебаний кузова, определитель предельной скорости и формирователь пакетов отчетных данных, причем выход датчика пройденного пути соединен с первым входом определителя скорости, первым входом блока масштабирования и входами первого, второго и третьего измерителей ускорений, выходы которых соединены соответственно со вторым, третьим и четвертым входами блока масштабирования, выход определителя скорости соединен с пятым входом блока масштабирования и со вторым входом формирователя пакета исходных данных, третий вход которого соединен с выходом блока масштабирования, выход пульта оператора соединен с шестым входом блока масштабирования и с первыми входами определителя степени неровности пути, определителя степени некруглости колес, определителя интенсивности колебаний кузова и определителя предельной скорости, вторые входы которых соединены с первым выходом накопителя, а выходы соединены соответственно с первым, вторым, третьим и четвертым входами формирователя пакетов отчетных данных, выход которого соединен с третьим входом накопителя, выход блока фильтров соединен с третьими входами определителя степени неровности пути и определителя степени некруглости колес, выход системы бортового времени соединен с вторым входом определителя скорости, четвертым входом формирователя пакетов исходных данных и третьим входом определителя интенсивности колебаний кузова, при этом первый, второй и третий измерители ускорений установлены соответственно на левой и правой буксах колесной пары и кузове измерителя, а датчик пройденного пути установлен на буксе колесной пары.
Сущность изобретения поясняется чертежами.
На фиг.1 изображена функционально-структурная схема устройства оценки состояния рельсового пути;
на фиг.2 изображена функционально-структурная схема измерителя ускорений устройства оценки состояния рельсового пути.
На фиг.1 обозначены датчик 1 пройденного пути, формирователь 2 пакетов исходных данных, накопитель 3, блок 4 фильтров, пульт 5 оператора, измерители 6, 7 и 8 ускорений, определитель 9 скорости, система 10 бортового времени, блок 11 масштабирования, определитель 12 степени неровности пути, определитель 13 степени некруглости колес, определитель 14 интенсивности колебаний кузова, определитель 15 предельной скорости и формирователь 16 пакетов отчетных данных.
На фиг.2 обозначены акселерометры 17, 18, 19 и 20, АЦП (аналого-цифровые преобразователи) 21, 22, 23 и 24, определитель 25 средних значений, определитель 26 экстремальных значений, интерфейсный преобразователь 27, генератор 28 тактовых импульсов и синхронизатор 29.
В устройстве оценки состояния рельсового пути (фиг.1) выход датчика 1 пройденного пути соединен с первым входом определителя 9 скорости, первым входом блока 11 масштабирования и входами первого 6, второго 7 и третьего 8 измерителей ускорений, выходы которых соединены соответственно со вторым, третьим и четвертым входами блока 11 масштабирования, выход определителя 9 скорости соединен с пятым входом блока 11 масштабирования и со вторым входом формирователя 2 пакета исходных данных, третий вход которого соединен с выходом блока 11 масштабирования.
Выход формирователя 2 пакетов исходных данных соединен с первым входом накопителя 3, первый выход которого соединен с входом блока 4 фильтров, а второй его выход является выходом устройства. Выход пульта 5 оператора соединен с первым входом формирователя 2 пакетов исходных данных, с вторым входом накопителя 3, с шестым входом блока 11 масштабирования и с первыми входами определителя 12 степени неровности пути, определителя 13 степени некруглости колес, определителя 14 интенсивности колебаний кузова и определителя 15 предельной скорости, вторые входы которых соединены с первым выходом накопителя 3, а выходы соединены соответственно с первым, вторым, третьим и четвертым входами формирователя 16 пакетов отчетных данных.
Выход формирователя 16 пакетов отчетных данных соединен с третьим входом накопителя 3, выход блока 4 фильтров соединен с третьими входами определителя 12 степени неровности пути и определителя 13 степени некруглости колес, выход системы 10 бортового времени соединен с вторым входом определителя 9 скорости, четвертым входом формирователя 2 пакетов исходных данных и третьим входом определителя 14 интенсивности колебаний кузова.
Первый 6, второй 7 и третий 8 измерители ускорений установлены соответственно на левой и правой буксах колесной пары и кузове измерителя, а датчик 1 пройденного пути установлен на буксе колесной пары.
В каждом из измерителей 6, 7 и 8 ускорений (фиг.2) выходы первого 17, второго 18, третьего 19 и четвертого 20 акселерометров соединены соответственно с первыми входами первого 21, второго 22, третьего 23 и четвертого 24 АЦП, выходы которых объединены и соединены с первыми входами определителя 25 средних значений и определителя 26 экстремальных значений, выходы которых соединены соответственно с первым и вторым входами интерфейсного преобразователя 27, первый и второй выходы которого соединены соответственно с вторыми входами определителя 25 средних значений и определителя 26 экстремальных значений, третьи входы которых соединены с первым выходом синхронизатора 29, второй, третий, четвертый и пятый выходы которого соединены соответственно с вторыми входами первого 21, второго 22, третьего 23 и четвертого 24 АЦП, третьи входы которых соединены с шестым выходом синхронизатора 29, вход которого соединен с выходом генератора 28 тактовых импульсов, на третий вход интерфейсного преобразователя 27 подается сигнал с выхода датчика 1 пройденного пути, а третий выход интерфейсного преобразователя 27 является выходом измерителя ускорений.
Первый 17 и второй 18 акселерометры имеют высокую чувствительность, а третий 19 и четвертый 20 низкую, оси чувствительности первого 17 и третьего 19 акселерометров направлены вертикально, а второго 18 и четвертого 20 горизонтально и поперечно к рельсовому пути.
Устройство для оценки состояния рельсового пути работает следующим образом.
В процессе движения измерителя буксы его колес и кузов испытывают ускорения, которые воспринимаются первым - третьим измерителями 6-8 ускорений. Датчик 1 пройденного пути (ДПП) воспринимает вращение колесной пары измерителя таким образом, что после прохождения осью колесной пары определенного кванта пути он вырабатывает очередной импульс.
Каждый из измерителей 6-8 ускорений содержит акселерометры 17-20, аналоговые сигналы с выходов которых поступают на первые входы быстродействующих АЦП 21-24. Генератор 28 тактовых импульсов работает на частоте примерно 100 кГц. Синхронизатор 29 содержит, например, счетчик, дешифратор и группу логических элементов. Он периодически вырабатывает определенную последовательность управляющих импульсов.
По импульсу с шестого выхода синхронизатора 29 АЦП 21-24 производят запоминание значений аналоговых сигналов с выходов акселерометров 17-20 соответственно и преобразуют их в цифровой код. Далее синхронизатор 29 вырабатывает последовательно на втором-пятом выходах импульсы опроса АЦП 21-24 соответственно, по которым оцифрованные значения измеренных ускорений последовательно поступают на первые входы определителя 25 средних и определителя 26 экстремальных значений одновременно, где фиксируются в памяти по импульсам, приходящим на их третьи входы с первого выхода синхронизатора 29.
Описанные выше действия осуществляются циклически в промежутках времени между импульсами, поступающими от ДПП 1 на третий вход интерфейсного преобразователя 27. С приходом очередного такого импульса интерфейсный преобразователь 27 вырабатывает на первом выходе сигнал запроса, по которому определитель 25 средних значений выполняет свою целевую функцию над выборкой значений, поступивших от АЦП 21-24 за последний промежуток времени между импульсами от ДПП 1, затем передает четыре определенных средних значения на первый вход интерфейсного преобразователя 27. Подобным образом интерфейсный преобразователь 27 взаимодействует с определителем 26 экстремальных значений. Полученная информация является выходной для каждого из измерителей 6-8 ускорений, она подается на второй-четвертый входы блока 11 масштабирования. На первый вход блока 11 масштабирования поступают импульсы от датчика 1 пройденного пути, а на его пятый и шестой входы - информация о текущем и фиксированном значениях скорости соответственно. Определитель 9 скорости определяет текущее значение скорости движения измерителя вдоль рельсового пути по длительности последнего промежутка времени между очередными импульсами с выхода ДПП 1, при этом используется выходная информация системы 10 бортового времени.
Блок 11 масштабирования определяет для каждого кванта пути текущее значение масштабного коэффициента как функцию текущего и фиксированного значений скорости движения измерителя вдоль пути, после чего производит умножение экстремальных и усредненных за квант пути значений на упомянутый масштабный коэффициент. Данные с выхода блока 11 масштабирования поступают на формирователь 2 пакетов данных, который формирует пакеты данных, длительность и информативность которых определяется с учетом значений текущего времени и текущей скорости по критериям, поступающим с пульта 5 оператора.
Сформированные пакеты данных последовательно поступают в накопитель 3, где запоминаются. Содержимое накопителя 3 может быть считано во внешнее устройство для обработки результатов поездки измерителя. Предлагаемое устройство позволяет произвести анализ получаемых данных в процессе поездки.
В этом случае очередной пакет данных из накопителя 3 поступает на блок 4 фильтров, который определяет параметры его гармонических составляющих, при этом за аргумент принимается совокупность квантов пути. Очередной пакет данных из накопителя 3 поступает также на вторые входы определителей 12-15 степени неровности пути, степени некруглости колес измерителя, интенсивности колебаний кузова и предельной скорости, а на их первые входы - информация о режимах обработки, значения констант и априорные данные. Параметры гармонических составляющих измеренных данных используются при определении степени неровности пути и степени некруглости колес.
Окончательные результаты работы определителей 12-15 параметров поступают на соответствующие входы формирователя 16 пакетов отчетных данных и далее в накопитель 3, со второго выхода которого по команде с пульта 5 оператора они могут быть выданы во внешнее устройство.
Предложенный способ оценки состояния рельсового пути позволяет при движении измерителя со скоростью до 250 км/час определить с высокой точностью и достоверностью величины ускорений, возникающих в основных элементах системы измеритель - путь, и получить комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава, при этом устройство, реализующее предлагаемый способ, является относительно простым и имеет низкую стоимость.
Простота устройства, его относительно низкая стоимость и способность длительное время работать в автономном режиме позволяют осуществить с его помощью оперативную оценку состояния рельсовых путей и подвижного состава в масштабах страны.
Вышеперечисленное обуславливает практическую применимость изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2025 |
|
RU2841488C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
| Устройство для измерения параметров рельсового пути | 1988 |
|
SU1555405A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 1997 |
|
RU2134319C1 |

Группа изобретений относится к области железнодорожного транспорта. Сущность способа заключается в измерении вертикальных и поперечных горизонтальных ускорений кузова измерителя, а также левой и правой букс одной из его колесных пар, определении для заранее заданной фиксированной скорости движения значений измеренных ускорений и составляющих вертикальных ускорений букс, сравнении полученных значений с допустимыми и определении минимального значения предельной скорости движения измерителя на конкретном участке рельсового пути. Устройство содержит датчик пройденного пути, формирователь пакетов исходных данных, накопитель, блок фильтров, пульт оператора, измерители ускорений, определитель скорости, систему бортового времени, блок масштабирования, определитель степени неровности пути, определитель степени некруглости колес, определитель интенсивности колебаний кузова, определитель предельной скорости и формирователь пакетов отчетных данных. Группа изобретений позволяет определять с высокой точностью и достоверностью величины ускорений, возникающих в основных элементах системы измеритель - путь, и получать комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава. При этом устройство, реализующее способ, является относительно простым и имеет низкую стоимость. 2 н. и 1 з.п. ф-лы, 2 ил.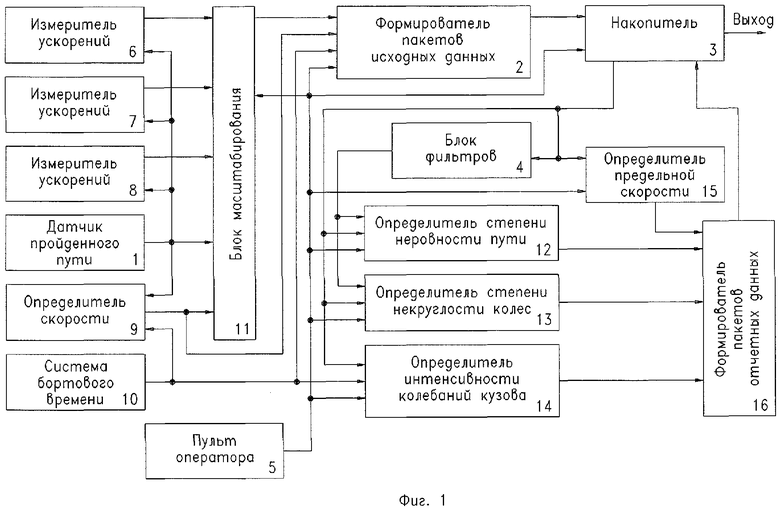
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| RU 2214938 С2, 27.10.2003 | |||
| Устройство для контроля состояния рельсового пути | 1988 |
|
SU1671756A1 |

