Изобретение относится к области ракетной техники и может быть использовано в системах управления авиационных ракет класса "воздух поверхность".
Известен способ управления полетом самонаводящейся ракеты класса "воздух - поверхность", заключающийся в наведении ракеты на выбранную точку на поверхности цели - точку слежения головки самонаведения (ГСН) (причем возможные изменения положения точки слежения в процессе автономного полета не контролируется) путем обеспечения движения ракеты по направлению "точка пуска - точка слежения" по сигналам, характеризующим относительное движение ракеты и точки слежения, в частности угловым скоростям линии визирования и пеленгам в вертикальной и горизонтальной плоскостях, измеряемым ГСН [1,2].
Из указанных источников информации известно устройство для осуществления способа управления полетом самонаводящейся ракеты класса "воздух - поверхность", содержащее головку самонаведения, включающую в себя гиростабилизатор с установленным на нем координатором цели, захватывающую выбранную цель перед пуском ракеты, и автопилот.
Недостаток известных способа и устройства заключается в резком снижении эффективности управления полетом ракеты при произвольном изменении положения точки слежения за целью в процессе автономного полета.
Изменение положения точки слежения ГСН в процессе автономного полета приводит к негативному результату.
При использовании предлагаемого изобретения достигается технический результат, заключающийся в обеспечении сохранения первоначально выбранной ракетой точки слежения на поверхности цели в течение всего автономного полета и тем самым повышения эффективности управления полетом ракеты.
Для достижения указанного результата в известном способе управления полетом самонаводящейся ракеты класса "воздух - поверхность", заключающемся в обеспечении движения ракеты по направлению "точка пуска - точка слежения" в зависимости от измеряемых ГСН в вертикальной и горизонтальной плоскостях значений углов пеленга или угловых скоростей линии визирования, которые в процессе обработки информации преобразуются в сигналы управления гиростабилизатором ГСН в соответствующих каналах управления, дополнительно в каждом канале управления гиростабилизатором на ограниченном интервале времени определяют угол отклонения гиростабилизатора от математического ожидания его положения на предшествующем интервале времени и сравнивают его с двумя пороговыми значениями, превышение меньшего из которых означает начало процесса перенацеливания, т. е. изменения положения точки слежения, а большего - наличие перенацеливания, требующего коррекции положения гиростабилизатора головки самонаведения; при этом движение ракеты при нахождении угла отклонения гиростабилизатора в пределах большего порогового значения осуществляют по непосредственно измеренным ГСН параметрам относительного движения ракеты и точки слежения, а при превышении им большего порогового значения снимается захват снимается захват цели ГСН и прекращается измерение параметров относительного движения ракеты и точки слежения, корректируется положение гиростабилизатора путем разворота его в направлении точки прицеливания и по окончании коррекции производится повторный захват цели по траектории в окрестностях первоначально выбранной точки слежения, при этом управление ракетой в период коррекции положения гиростабилизатора ГСН (от момента снятия захвата до его восстановления) производится по вычисленным сигналам математического ожидания угловых скоростей линии визирования или углов пеленга в вертикальной и горизонтальной плоскостях в зависимости от метода управления ракетой до начала коррекции.
По окончании коррекции восстанавливается управление по непосредственно измеренным сигналам угловых скоростей линии визирования или углов пеленга.
Частным случаем реализации предлагаемого изобретения является такой способ управления, при котором для определения величины угла отклонения гиростабилизатора ГСН используется разность между измеренным значением сигнала управления гиростабилизатором и его математическим ожиданием, вычисленным на предшествующем ограниченном интервале времени.
Технический результат, достигаемый при осуществлении указанного выше способа, обеспечивается при использовании устройства, содержащего автопилот и головку самонаведения, включающую координатор цели и гиростабилизатор, новизна которого заключается в том, что оно снабжено корректором, включающим блок формирования пороговых значений, блок формирования команды "Коррекция" ("Кор"), блок вычисления углов отклонения гиростабилизатора, блок формирования сигналов коррекции, блок формирования сигналов управления ракетой при коррекции, блок формирования команды "Разрешение захвата" ("РЗ") на траектории и блок переключения сигналов управления ракетой, а в головку самонаведения введены блок управления гиростабилизатором, в который включен гиростабилизатор и блок переключения сигналов управления гиростабилизатором, причем одна группа входов блока формирования пороговых значений соединена с командными выходами автопилота, другая группа его входов с измерительными выходами головки самонаведения и информационными выходами носителя, а выходы - с первой группой входов блока формирования команды "Коррекция" и первой группой входов блока вычисления углов отклонения гиростабилизатора, другие информационные входы которого подключены к информационным выходам координатора цели и блока формирования команды "Коррекция", а выходы - ко второй группе информационных входов блока формирования команды "Коррекция", командный вход которого подключен к выходу блока формирования команды "РЗ" на траектории, командный выход которого соединен с командными входами блока управления гиростабилизатором и блока формирования команды "РЗ" на траектории, а информационные выходы соединены с входами блока формирования сигналов коррекции, один из выходов которого соединен с информационным входом блока формирования команды "РЗ" на траектории, а остальные - с первой группой управляющих входов блока переключения сигналов управления гиростабилизатором, вторая группа управляющих входов которого соединена с выходами координатора цели, а командные входы - с выходами блока формирования команды "РЗ" на траектории, а две группы выходов соединены с двумя группами входов блока управления гиростабилизатором, дополнительные выходы которого соединены со второй группой входов блока формирования сигналов управления ракетой при коррекции, а основные выходы являются выходами головки самонаведения и соединены с первой группой входов блока переключения сигналов управления ракетой, вторая группа входов которого соединена с выходами блока формирования сигналов управления ракетой при коррекции, информационные и командный входы которого соединены с соответствующими выходами блока формирования команды "Коррекция", командный выход которого также соединен с входом блока управления гиростабилизатором и с входом блока формирования команды "РЗ" на траектории, выходы которого соединены с командными входами блока переключения сигналов управления ракетой, выходы которого связаны с автопилотом.
Отдельные входы боков формирования команды "Коррекция", вычисления углов отклонения гиростабилизатора, формирования сигналов коррекции и формирования команды "РЗ" на траектории подключены к таймеру.
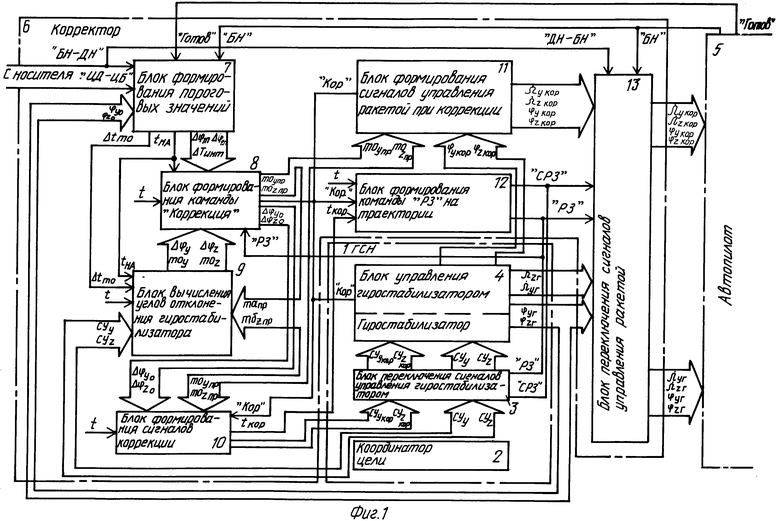
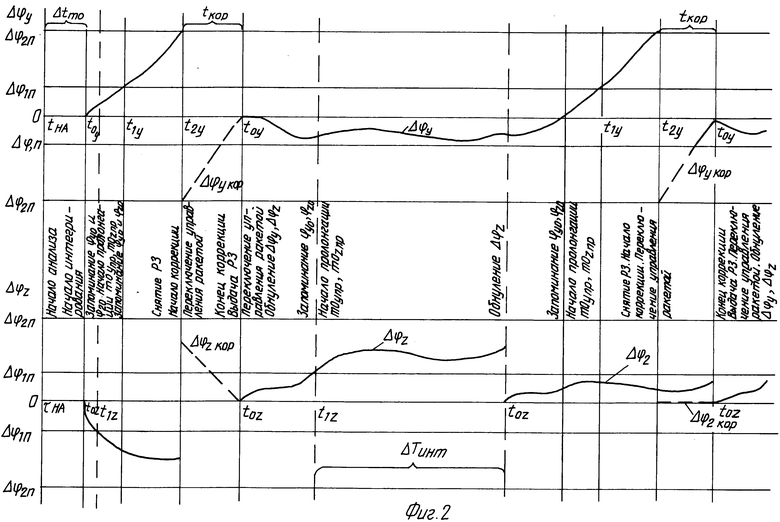
На фиг. 1 показана блок-схема устройства управления полетом самонаводящейся ракеты класса "воздух - поверхность"; на фиг.2 - графики, иллюстрирующие возможные варианты изменения вычисленных углов отклонения гиростабилизатора и соответствующие этим изменениям циклограммы работы предлагаемого устройства; на фиг.3 - сравнительные графики с примерами изменения положения точки слежения головки самонаведения в процессе автономного полета ракеты, управление полетом которой производится известным из прототипа образом и способом, осуществляемым согласно изобретению.
Устройство управления полетом самонаводящейся ракеты класса "воздух - поверхность" (см. фиг.1) содержит головку самонаведения 1, включающую в себя координатор цели 2, блок переключения 3 сигналов управления гиростабилизатором, блок управления 4 гиростабилизатором, гиростабилизатор и таймер (на чертеже не показан), автопилот 5, корректор 6, включающий в себя блок формирования пороговых значений 7, блок формирования команды "Коррекция" 8, блок вычисления 9 углов отклонения гиростабилизатора, блок формирования сигналов коррекции 10, блок формирования сигналов управления ракетой при коррекции 11, блок формирования команды "РЗ" на траектории 12 и блок переключения сигналов управления ракетой 13.
Головка самонаведения 1 применительно к заявленному устройству осуществляет следующие функции: измерение пеленга в вертикальной плоскости (ϕyг); измерение пеленга в горизонтальной плоскости (ϕzг); измерение угловой скорости линии визирования в вертикальной плоскости  ; измерение угловой скорости линии визирования в горизонтальной плоскости
; измерение угловой скорости линии визирования в горизонтальной плоскости 
Координатор цели 2 применительно к заявленному устройству вырабатывает измеренные сигнал управления гиростабилизатором в вертикальной плоскости (СУ y) и сигнал управления гиростабилизатором в горизонтальной плоскости (СУ z).
Выходы координатора цели 2 по указанным параметрам подключены ко входам блока переключения 3 сигналов управления гиростабилизатором, к другим - подключены выходы блока формирования сигналов коррекции 10, по которым подаются сигнал коррекции положения гиростабилизатора в вертикальной плоскости (СУ yкор) и сигнал коррекции положения гиростабилизатора в горизонтальной плоскости (СУ zкор). Выходы блока 3 соединены со входами блока управления гиростабилизатором 4, выходы которого по сигналам  связаны с выходами головки самонаведения и подключены к соответствующим входам блока 13 переключения сигналов управления ракетой.
связаны с выходами головки самонаведения и подключены к соответствующим входам блока 13 переключения сигналов управления ракетой.
Автопилот 5 применительно к предлагаемому устройству осуществляет следующие функции: формирование команд "Готов", "Ближнее наведение" ("БН") и заданных перегрузок в каналах управления (nзадI) и (nзадII).
Выходы автопилота 5 по командным сигналам "Готов" и "БН" подключены ко входам блока формирования пороговых значений 7, по команде "БН" - к командному входу блока 13 переключения сигналов управления ракетой.
Выходы автопилота по параметрам nзадI и nзадII являются выходами устройства и подключены к исполнительным органам ракеты (на чертеже не показаны).
Входы блока 7 формирования пороговых значений по каналам "ДН-БН" - способ управления ракетой и "ЦД-ЦБ" - дальность по цели подключены к выходу носителя (на чертеже не показан), а по каналам угла пеленга в вертикальной плоскости (ϕyо) на момент пуска и угла пеленга в горизонтальной плоскости на момент пуска (ϕzо) - к головке самонаведения 1. Выходы блока формирования пороговых значений 7 по каналам длительности интервала интегрирования (ΔTинт), порогового значения вычисленного угла отклонения гиростабилизатора, определяющего его предельный угол отклонения, обусловленный естественными помехами (Δϕ1п), порогового значения вычисленного угла отклонения гиростабилизатора, обусловленного допустимой величиной перенацеливания (Δϕ2п), подключены к соответствующим входам блока 8 формирования команды "Коррекция", командный вход которого по команде "Разрешение захвата" ("РЗ") - к соответствующему выходу блока 12 формирования команды "РЗ" на траектории, а по времени начала анализа сигналов управления гиростабилизатором (tна) также и к блоку 9 вычисления углов отклонения гиростабилизатором, к которому также подключены и выход по длительности интервала вычисления математического ожидания сигналов управления гиростабилизатором (Δtmо), , а вторая группа входов блока вычисления 9 углов отклонения гиростабилизатора по сигналам СУy и СУz подключена к соответствующим выходом координатора цели 2.
Для временной синхронизации блоки 8, 9, 10, 12 соединены с таймером (на чертеже не показан).
Выходы блока 8 по текущему математическому ожиданию сигнала управления гиростабилизатором в вертикальной плоскости (moy), текущему математическому ожиданию сигнала управления гиростабилизатором в горизонтальной плоскости (moz), вычисленному углу отклонения гиростабилизатора в вертикальной плоскости (Δϕy), вычисленному углу отклонения гиростабилизатора в горизонтальной плоскости (Δϕz) соединены с соответствующими входами блока 8 формирования команды "Коррекция", выходы которого по пролонгированному значению математического ожидания сигнала управления гиростабилизатором в вертикальной плоскости (moупр), пролонгированному значению математического ожидания сигнала управления гиростабилизатором в горизонтальной плоскости (mozпр) подключены к соответствующим входам блоков 9, 10, 11, запомненному значению вычисленного угла отклонения гиростабилизатора в вертикальной плоскости (Δϕyо) и запомненному значению вычисленного угла отклонения гиростабилизатора в горизонтальной плоскости (Δϕzо) соединены с блоком 10 формирования сигналов коррекции, командные входы блока вычисления 9 углов отклонения гиростабилизатора по команде "Коррекция" соединены с командными входами блока 10 формирования сигналов коррекции, блока 11 формирования сигналов управления ракетой при коррекции и блока 12 формирования команды "РЗ" на траектории.
Выходы блока 10 по управляющему сигналу коррекции положения гиростабилизатора в вертикальной плоскости (СУyкор) и управляющему сигналу коррекции положения гиростабилизатора в горизонтальной плоскости (СУzкор) подключены к соответствующим входам блока 3 переключения сигналов управления гиростабилизатором. По времени продолжения коррекции положения гиростабилизатора (tкор) - блок 10 соединен по соответствующему входу с блоком 12.
Выходы блока 11 формирования сигналов управления ракетой при коррекции по сигналам вычисленных угловой скорости линии визирования при коррекции положения ГС в вертикальной плоскости  угловой скорости линии визирования при коррекции положения ГС в горизонтальной плоскости
угловой скорости линии визирования при коррекции положения ГС в горизонтальной плоскости  угла пеленга в вертикальной плоскости (ϕyкор) и угла пеленга в горизонтальной плоскости (ϕzкор) соединены с соответствующими входами блока 13 переключения сигналов управления ракетой. Выходы блока 12 по командам "Разрешение захвата" ("РЗ") и "Снятие разрешения захвата" ("СРЗ") соединены с соответствующими командными входами блоков 3 и 13, дополнительный командный вход которого по командам "ДН - БН" соединен с соответствующим выходом носителя.
угла пеленга в вертикальной плоскости (ϕyкор) и угла пеленга в горизонтальной плоскости (ϕzкор) соединены с соответствующими входами блока 13 переключения сигналов управления ракетой. Выходы блока 12 по командам "Разрешение захвата" ("РЗ") и "Снятие разрешения захвата" ("СРЗ") соединены с соответствующими командными входами блоков 3 и 13, дополнительный командный вход которого по командам "ДН - БН" соединен с соответствующим выходом носителя.
Выходы координатора цели 2 по сигналам СУy и СУz помимо блока 9 соединены также с соответствующими входами второй группы входов блока 3.
Две группы выходов блока 3 переключения сигналов управления гиростабилизатором по сигналам СУyкор, СУzкор, СУy, СУz соединены соответственно с двумя группами входов гиростабилизатора 4, выходы которого по сигналам  являются выходами головки самонаведения.
являются выходами головки самонаведения.
Выходы блока 13 по сигналам  являются выходами корректора 6 и подключены к соответствующим входам автопилота 5.
являются выходами корректора 6 и подключены к соответствующим входам автопилота 5.
Перед пуском ракеты на блок 7 формирования пороговых значений поступают команды с носителя, дающие информацию о дальности до цели "Цель дальняя" ("ЦД") или "Цель ближняя" ("ЦБ"), выбранном способе управления: по углам пеленга в вертикальной (ϕyг) и горизонтальной (ϕzг) плоскостях - команда "Дальнее наведение" ("ДН") или по угловым скоростям линии визирования в вертикальной  и горизонтальной
и горизонтальной  плоскостях - команда "Ближнее наведение" ("БН"), из головки самонаведения 1 - о величине углов пеленга в вертикальной плоскости (ϕyо) и горизонтальной плоскости (ϕzо) на момент пуска, которые запоминаются по команде "Готов".
плоскостях - команда "Ближнее наведение" ("БН"), из головки самонаведения 1 - о величине углов пеленга в вертикальной плоскости (ϕyо) и горизонтальной плоскости (ϕzо) на момент пуска, которые запоминаются по команде "Готов".
По совокупности поступающей информации выбираются время начала анализа, длительности интервала и способ вычисления математических ожиданий сигналов управления гиростабилизатором (Δtmо) и интервала интегрирования (времени цикла анализа) (ΔTинт), которые могут корректироваться на траектории при изменении способа управления движением ракеты с управления по углам пеленга на управление по угловым скоростям линии визирования (по команде "БН", поступающей из автопилота 5).
После пуска ракета управляется по непосредственно измеренным значениям углов пеленга или угловых скоростей линии визирования.
Включение блока 8 формирования команды "Коррекция" и блока 9 вычисления углов отклонения гиростабилизатора производится в момент tна (см фиг.2), определяемом в блоке 7 формирования пороговых значений, и с этого момента в блоке 9 в обоих каналах управления независимо друг от друга начинается вычисление текущих значений математических ожиданий сигналов управления гиростабилизатором moy, moz.
На времени toy(z) = tна + Δ tmo начинается обновление текущих значений математического ожидания, при этом вычисление последнего производится на интервале времени Δtmо, сдвигаемом относительно предыдущего интервала на шаг обновления поступающей в корректор 6 информации.
Одновременно начинается вычисление углов отклонения гиростабилизатора от его среднего значения по формулам
Вычисленные значения сигналов Δϕy и Δϕz, а также текущее время с таймера поступают на блок 8 формирования команды "Коррекция", в котором независимо друг от друга сравниваются с порогом Δϕп.
В случае, если величины Δϕy и Δϕz не превышают порогового значения Δϕ1п, наведение ракеты происходит на выбранную перед пуском точку на поверхности цели, реакции корректора не требуется и управление ракетой осуществляется традиционным способом.
В случае превышения одним из параметров Δϕy или Δϕz порога Δϕ1п, что означает начало перенацеливания, в корректоре выполняются следующие операции (см. фиг.2).
Запоминается время превышения порога Δϕ1п (t1y или t1z).
С этого момента в канале, где был превышен порог Δϕ1п в блоке 8 начинается вычисление пролонгированного математического ожидания сигнала управления гиростабилизатором moпр по его изменению на предыдущем интервале времени Δtmо, в блоке 9 вычисление угла отклонения гиростабилизатора (Δϕ) производится по формуле
В канале, где не было отмечено превышения порога Δϕ1п вычисление угла Δϕ производится по формуле
Ситуация, при которой величина Δϕ в течение интервала интегрирования ΔTинт, начиная с момента превышения порога Δϕ1п, не превысит пороговое значение Δϕ2п, означает допустимое перенацеливание. В этом случае вмешательства корректора не требуется, ракета управляется традиционным способом. По окончании интервала ΔTинт в блоке 9 производится обнуление величины Δϕ в канале, где был превышен порог Δϕ1п, и начинается новый цикл вычислений.
Ситуация, при которой величина Δϕ на интервале времени ΔT < ΔTинт в одном из каналов превышает порог Δϕ2п, означает перенацеливание, требующее вмешательства корректора. В этом случае в момент превышения порога Δϕ2п (t2) блоком 8 формирования команды "Коррекция" выдается команда, по которой в блоке 11 формирования сигналов управления ракетой при коррекции по пролонгированным значениям математического ожидания сигналов управления гиростабилизатором (mozпр и moyпр) формируются сигналы управления ракетой  в блоке 4 управления гиростабилизатора формируются сигналы управления ракетой ϕyкор и ϕzкор и передаются в блок 11. В блоке 12 формирования команды "РЗ" на траектории формируется команда "Снятие РЗ", а в блоке 10 формирования сигналов коррекции формируются сигналы коррекции положений гиростабилизатора СУyкор, СУzкор по следующему алгоритму:
в блоке 4 управления гиростабилизатора формируются сигналы управления ракетой ϕyкор и ϕzкор и передаются в блок 11. В блоке 12 формирования команды "РЗ" на траектории формируется команда "Снятие РЗ", а в блоке 10 формирования сигналов коррекции формируются сигналы коррекции положений гиростабилизатора СУyкор, СУzкор по следующему алгоритму: .
.
Сигналы коррекции СУкор и СУкор поступают на блок 3 переключения сигналов управления гиростабилизатором в течение времени коррекции, т.е. от момента поступления с блока 12 команды "СРЗ" до окончания интервала tкор.
Команда "СРЗ" из блока 12 поступает также в блок 13 переключения сигналов управления ракетой, где при наличии команды "БН" производится переключение сигналов управления ракетой с измеренных  на сформированные в блоке 11
на сформированные в блоке 11  . При отсутствии команды "БН" (наличии команды "ДН") управление ракетой производится по соответствующим углам пеленга ϕyг и ϕzг или ϕyкор и ϕzкор. .
. При отсутствии команды "БН" (наличии команды "ДН") управление ракетой производится по соответствующим углам пеленга ϕyг и ϕzг или ϕyкор и ϕzкор. .
По окончании времени коррекции в блоке 12 формируется команда "РЗ", по которой в блоке 3 управление гиростабилизатором переключается с сигналов коррекции СУyкор и СУzкор на измеренные сигналы управления СУy, СУz, в блоке 13 управление ракетой переключаются с сигналов  на сигналы
на сигналы  или с сигналов ϕyкор , ϕzкор на сигналы ϕyг , ϕzг, , а в блоке 8 начинается новый цикл анализа.
или с сигналов ϕyкор , ϕzкор на сигналы ϕyг , ϕzг, , а в блоке 8 начинается новый цикл анализа.
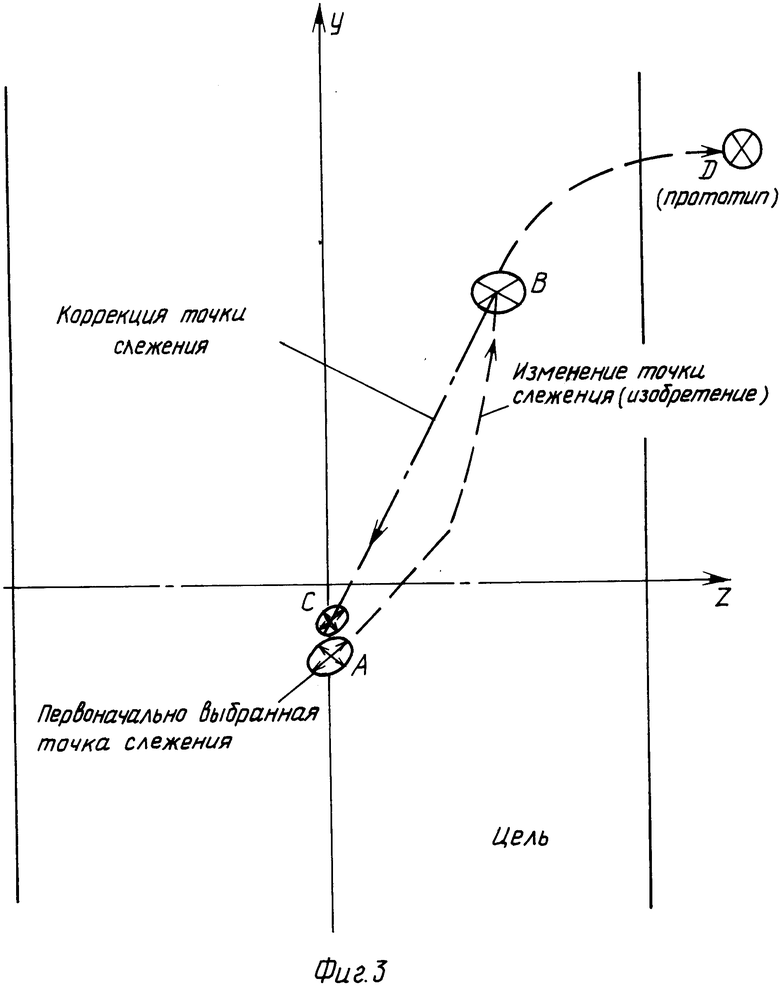
На фиг.3 представлен фрагмент крупногабаритной цели, на котором нанесены точка A - первоначально выбранная точка слежения, точка B - измененная точка слежения при достижении величиной Δϕy порога ϕ2п, точка C - положение точки слежения после коррекции положения гиростабилизатора.
В случае традиционного управления положением гиростабилизатора (прототип) положение точки слежения может меняться произвольно, в том числе и выходить за контур цели (точка D).
Расчеты и эксперимент показывают, что предлагаемый способ управления ракетой класса "воздух - поверхность" позволяет обеспечить наведение ракеты на первоначально выбранный участок цели в течение всего времени полета и тем самым существенно повысить эффективность управления полетом ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ КЛАССА "ВОЗДУХ - ПОВЕРХНОСТЬ" | 2004 |
|
RU2254268C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
Изобретение может быть использовано области ракетной техники для обеспечения сохранения первоначально выбранной точки слежения за целью в течение всего автономного полета ракеты, что обеспечивает повышение эффективности управления ее полетом. В процессе автономного полета на борту ракеты в специальном устройстве по измеренным текущим параметрам относительного движения ракеты и точки слежения на поверхности цели производят вычисление отклонения углов разворота линии визирования в плоскостях управления от их средних значений на текущем ограниченном интервале времени и сравнение этих отклонений с пороговыми значениями. Превышение одним из них установленного порогового значения означает перенацеливание головки самонаведения. В случае перенацеливания прекращают слежение за целью и производят коррекцию положения линии визирования с целью восстановления первоначального положения точки слежения. По окончании коррекции возобновляют слежение за целью. Управление ракетой в период коррекции производят по вычисленным в устройстве управляющим сигналам. 2 с. и 3 з.п. ф-лы, 3 ил.