Изобретение относится к области ракетной техники. Известны способы командного телеуправления ракетами по отклонению относительно расчетной кинематической траектории, а также устройства, обеспечивающие устойчивость и динамическую точность систем [1].
Аналогом предложенного технического решения является способ управления ракетой 9М311-М1 зенитного ракетно-пушечного комплекса 2С6М1 "Тунгуска" [2].
Наведение ракеты на цель производится по методу совмещения. В состав комплекса входит радиолокационно-оптическая система сопровождения цели (ССЦР), с которой съюстирован оптический следящий пеленгатор ракеты - аппаратура выделения координат (АВК). В процессе наведения АВК измеряет угловые отклонения ракеты относительно линии визирования цели по факелу двигателя на стартовом (разгонном) участке траектории и по сигналам импульсного инфракрасного ответчика на маршевом участке. В состав АВК входит блок-обнаружитель сигнала, который вырабатывает признак "сигнал=1", если уровень сигнала на входе АВК превышает заданный порог. При отсутствии полезного сигнала на входе АВК вырабатывается признак "сигнал=0".
Выходные сигналы АВК поступают в цифровую вычислительную систему (ЦВС), которая вырабатывает команды управления ракетой. С выхода ЦВС команды поступают на шифратор и по радиолинии через антенну ССЦР передаются на борт ракеты. На борту команды принимаются, дешифрируются, преобразуются в связанную по крену с ракетой систему координат и подаются на рулевые привода ракеты. Под действием отклонения рулей формируются нормальные перегрузки и обеспечивается движение ракеты по заданной траектории до встречи с целью.
На стартовом участке траектории вследствие работы разгонного двигателя задымляется оптическая линия связи (ОЛС) ракета - АВК, что может приводить к прерываниям ОЛС и потере ракеты (прекращению ее сопровождения АВК). С целью уменьшения задымления вводится программное смещение ракеты относительно линии визирования - программа обхода дыма (ПОД).
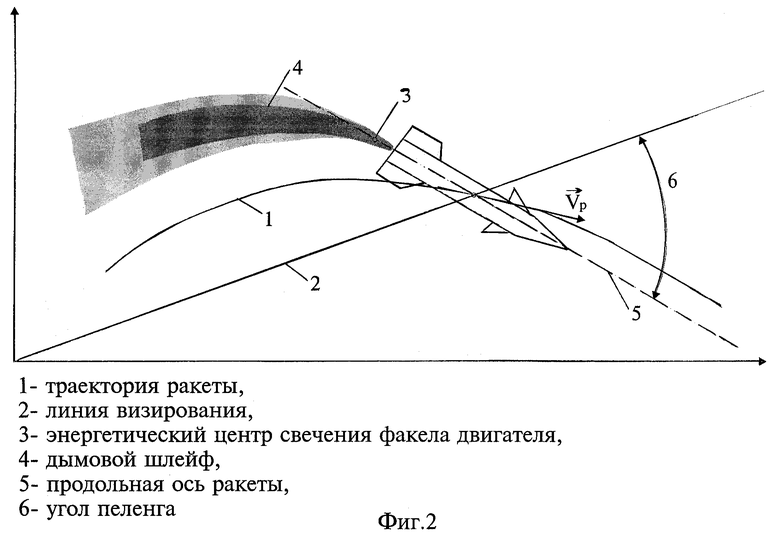
Примерный вид программы приведен на фиг.1. Уменьшение задымления линии визирования при движении ракеты по программе достигается за счет отклонения дымового шлейфа относительно линии визирования ракеты, см. фиг.2.
Удовлетворительные условия для сопровождения ракеты АВК обеспечиваются, если угол между продольной осью ракеты и линией визирования ракеты превышает половину углового размера дымового шлейфа.
Для обеспечения движения ракеты по программе перед производством выстрела пусковая установка с ракетой отворачивается относительно линии визирования цели на угол Е таким образом, чтобы к моменту начала управления ракета попала на программную траекторию. Затем ракета управляется по отклонению относительно программы, которая уменьшается до нуля после окончания работы двигателя, что обеспечивает плавный вывод ракеты на линию визирования цели.
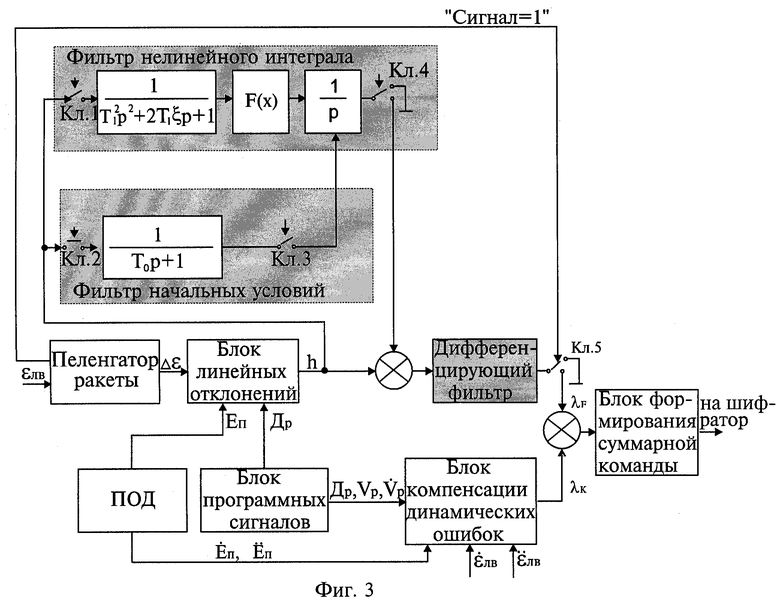
Блок-схема системы управления представлена на фиг.3.
Линейное отклонение ракеты относительно программной траектории определяется по формуле
h = [Δε-Eп(t)•Дp(t),
где Δε - сигнал углового отклонения ракеты относительно линии визирования цели с выхода пеленгатора (АВК),
EП(t) - программа обхода дыма,
Др(t) - программная (расчетная) дальность до ракеты.
Сигнал отклонения поступает на дифференцирующий фильтр, который обеспечивает устойчивость системы управления [3]. Передаточная функция дифференцирующего фильтра имеет вид
где Тф - постоянная времени фильтра,
n - разнос фильтра,
р - оператор дифференцирования.
После окончания стартового участка замыкаются ключи 1-4 и в сигнал управления вводится интеграл от ошибки наведения (повышается порядок астатизма системы) с целью повышения точности системы наведения. "Вес" интеграла в сигнале управления в зависимости от величины ошибки системы определяется нелинейной функцией F(x). Указанные операции выполняются в блоках "Фильтр нелинейного интеграла" и "Фильтр начальных условий", показанных на фиг.3.
При отсутствии полезного сигнала на входе пеленгатора (признак "сигнал= 0") размыкается ключ 5, дифференцирующий фильтр отключается, команда коррекции по отклонению ракеты обнулена, λF = 0.
С целью повышения точности в контур управления ракетой включен блок компенсации динамических ошибок (КДО) от движения линии визирования и от программы обхода дыма. В блоке компенсации по известным кинематическим соотношениям [4] рассчитываются потребные ускорения ракеты для движения по заданной траектории - команды компенсации λк. Исходными данными для расчета команд компенсации являются
- угловые скорости и ускорения программы обхода дыма  вычисленные в блоке ПОД;
вычисленные в блоке ПОД;
- угловые скорости и ускорения линии визирования цели  поступающие от устройства дифференцирующе-сглаживающего;
поступающие от устройства дифференцирующе-сглаживающего;
- программные сигналы дальности Др, скорости Vp и продольного ускорения  ракеты.
ракеты.
Команды с выхода корректирующего фильтра и команды компенсации динамических ошибок суммируются и поступают в блок формирования суммарной команды, которая вырабатывается по формуле
где Кр - коэффициент усиления разомкнутого контура управления,
δmax - максимальный угол отклонения рулей ракеты,
nр - располагаемая перегрузка ракеты,
kобщ - коэффициент передачи бортовой аппаратуры ракеты.
Далее суммарная команда управления преобразуется в связанную с ракетой систему координат с учетом "скручивания" и "излома" измерительной и исполнительной систем координат и передается на шифратор для трансляции на борт ракеты.
Динамическое проектирование рассмотренной системы наведения выполнено на основе традиционных методов синтеза линейных стационарных систем управления [3], что в известной степени предопределило недостатки рассмотренного способа управления.
1. Прерывания процесса сопровождения ракеты приводят к существенному снижению точности наведения.
При задымлении ОЛС на стартовом участке, а также при неблагоприятных метеоусловиях на больших дальностях стрельбы сопровождение ракеты происходит при низких уровнях входного сигнала, на уровнепорога чувствительности пеленгатора. В этих условиях возможны прерывания выходного сигнала пеленгатора, "мерцания" сигнала.
При прерываниях сигналов ("сигнал=0") сигнал коррекции λF обнуляется, управление ракетой осуществляется по командам КДО без учета отклонения ракеты относительно расчетной траектории. При появлении входного сигнала (после его исчезновения) дифференцирующий фильтр включается с нулевыми начальными условиями по производной для предотвращения "скачков" в командах управления. Таким образом, система управления "лишена памяти" - кратковременные прерывания сигналов пеленгатора приводят к потере всей предшествующей информации о движении ракеты и, в конечном счете, к увеличению промаха.
2. Управление ракетой по отклонению относительно программы обхода дыма не обеспечивает надежного сопровождения ракеты на стартовом участке.
При управлении по отклонению ракета колеблется под действием возмущений относительно ПОД на частотах, близких к частоте среза контура управления (0,3÷0,5 Гц). Колебания в командах управления приводят к изменению знака управляющей перегрузки и, соответственно, угла атаки и угла пеленга ракеты. При нулевых углах пеленга дым от работающего двигателя выбрасывается на оптическую линию связи ракеты - АВК, что приводит к срыву сопровождения ракеты.
3. Вывод ракеты на линию визирования по программе обхода дыма отодвигает ближнюю границу зоны поражения комплекса. Для уменьшения непоражаемой зоны необходимо, чтобы после окончания работы разгонного двигателя вывод ракеты на линию визирования производился за минимальное время, т.е. система управления должна быть близкой к оптимальной по быстродействию.
Рассмотренная система управления данному требованию не удовлетворяет.
Устранение указанных недостатков может быть достигнуто при использовании алгоритмов управления ракетой, основанных на использовании фильтра Калмана. Прототипом предлагаемого изобретения является способ телеуправления ракетой [5] , включающий измерение отклонения ракеты относительно линии визирования цели (или некоторой расчетной кинематической траектории), определение оценок отклонения и производной отклонения и формирование сигнала коррекции по оценкам отклонения и производной отклонения (под оценками понимаются сглаженные, отфильтрованные сигналы отклонения и производной отклонения).
Оценки отклонения ракеты относительно линии визирования в соответствии с алгоритмом Калмановской фильтрации вычисляются по формулам
где  оценка отклонения ракеты,
оценка отклонения ракеты, оценка производной отклонения,
оценка производной отклонения,
h - отклонение ракеты относительно линии визирования, определяемое по сигналам пеленгаторов ракеты и цели (измеренное отклонение),
k1, k2 - коэффициенты фильтрации,
U - ускорение ракеты относительно линии визирования, развиваемое под действием команд управления.
Для определения нормального ускорения ракеты относительно линии визирования подают сигнал коррекции с выхода корректирующего фильтра на модель, аппроксимирующую движение ракеты под действием команд
U(p) = Wм(p)•λF(p),
где U(p) - нормальное ускорение ракеты,
λF(p) - сигнал с выхода корректирующего фильтра,
WM(p) - передаточная функция аппроксимирующей модели.
При отсутствии существенных задержек в линии передачи команд и при малой инерционности ракеты допустимо принять, что нормальное ускорение ракеты пропорционально сигналу с выхода корректирующего фильтра.
Команду управления ракетой вырабатывают по оценкам отклонения ракеты относительно линии визирования и производной отклонения и по оценкам параметров движения цели. Синтез закона управления осуществляется на основе методов теории оптимального управления [5].
По сравнению с аналогичным способом управления ракетой 9М311-М1 рассмотренный способ обеспечивает повышение точностных и динамических характеристик системы наведения за счет использования оптимальных алгоритмов фильтрации координат ракеты. Вместе с тем, рассмотренный способ не обеспечивает устранение указанных выше недостатков, а именно:
- существенного снижения точности наведения при прерываниях сигнала пеленгатора ракеты;
- низкой надежности вывода ракеты на линию визирования вследствие колебаний ракеты относительно программы обхода дыма;
- увеличения непоражаемой зоны ракетного комплекса.
Задачей предлагаемого изобретения является повышение точности и надежности системы управления, а также уменьшение непоражаемой зоны ракетного комплекса.
Поставленная задача достигается тем, что в способе командного телеуправления ракетой, включающем пуск ракеты под углом Е к линии визирования цели и вывод ракеты на линию визирования цели, измерение отклонения ракеты относительно линии визирования h, определение оценок отклонения ракеты  и производной отклонения
и производной отклонения  по формулам
по формулам
где U - ускорение ракеты относительно линии визирования,
k1, k2 - коэффициенты фильтрации,
формирование сигнала коррекции по отклонению ракеты относительно линии визирования и вычисление ускорения ракеты U, пропорционального сигналу коррекции, сигнал коррекции λF вырабатывают по формулам
где k, ϕ, f(t) - параметры закона управления,
nр - расчетная располагаемая перегрузка ракеты,
g - ускорение силы тяжести,
при этом угол пуска Е и функцию f(t) выбирают таким образом, чтобы на участке вывода ракеты на линию визирования цели обеспечивался угол между продольной осью ракеты и линией визирования ракеты не менее половины углового размера дымового шлейфа ракеты.
При прерываниях процесса измерения отклонения ракеты оценки отклонения ракеты и производной отклонения определяют по формулам

На фиг. 4 представлена блок-схема системы, в которой реализован предложенный способ наведения.
Программа обхода дыма в системе исключена. Пуск ракеты производится под углом Е к линии визирования. Стремясь парировать начальное рассогласование, система управления вырабатывает команду управления, направленную на возврат ракеты к линии визирования. На стартовом участке команда управления ограничивается по абсолютной величине, при этом величина ограничения f(t) подбирается таким образом, чтобы при работе разгонного двигателя обеспечивалась постоянная по знаку команда "к линии визирования". В результате при работе разгонного двигателя исключены колебания ракеты по углу атаки и обеспечивается гарантированный угол между линией визирования ракеты и продольной осью ракеты, составляющий не менее половины углового размера дымового шлейфа.
В целом предложенное решение повышает надежность вывода ракеты на линию визирования за счет уменьшения задымления оптической линии связи ракета - АВК и позволяет использовать в оптической системе управления ракеты, оснащенные мощным разгонным двигателем с повышенным дымообразованием.
В момент времени f после окончания работы разгонного двигателя команда управления меняет знак, система управления обеспечивает энергичное "торможение" ракеты для обеспечения ее вывода на линию визирования цели.
Момент переключения знака команды t' зависит от угла пуска Е, величины ограничения команды f(t) и действующих на ракету возмущений - рассеивания ракет на неуправляемом участке полета, ветра, разброса аэродинамических характеристик, не скомпенсированных кинематических возмущений от движения линии визирования и т.д. При проектировании системы наведения подбором угла пуска Е обеспечивают для невозмущенного движения ракеты выполнение условия t'≥tcт, где tст - время работы разгонного двигателя. В результате действия на ракету возмущений движение ракеты отличается от расчетного, система наведения парирует действие возмущений изменением момента переключения знака команды.
Таким образом, на стартовом участке реализуется близкий к релейному закон управления - вывод ракеты на линию визирования происходит за минимальное время при обеспечении гарантированного угла пеленга ракеты. При малых рассогласованиях после окончания стартового участка управление ракетой производится по линейному закону.
Сокращение времени вывода ракеты на линию визирования в предложенном способе наведения уменьшает непоражаемую зону ракетного комплекса.
Способ управления ракетой проиллюстрирован на фиг.5, где представлены переходные процессы на участке вывода ракеты: команда управления, угловое и линейное отклонения ракеты относительно линии визирования и угол пеленга ракеты (получены при моделировании системы управления ракетой).
Желаемые динамические характеристики системы наведения в линейной зоне (полоса пропускания, демпфирование системы) обеспечиваются выбором коэффициентов закона управления k и ϕ. Коэффициенты фильтрации вычисляются в процессе наведения ракеты по формулам







где Dпр - программная дальность до ракеты,
σ
q2 - дисперсия действующих на ракету возмущений,
d - шаг решения уравнений, коэффициенты корреляции ошибок оценивания,
коэффициенты корреляции ошибок оценивания,
Р11*(n+1), Р12*(n+1), Р13*(n+1) - коэффициенты корреляции ошибок экстраполяции.
Начальные условия для решения уравнений (1) определяются по статистическим характеристикам рассеивания ракет на момент начала управления.
По мнению авторов изобретения, расчет коэффициентов в процессе наведения ракеты позволяет в полной мере использовать преимущество Калмановского алгоритма фильтрации - учет нестационарности процессов в системе наведения [6, 7]. В частности, обеспечивается сужение полосы пропускания контура управления и уменьшение флуктуационной составляющей промаха в соответствии с увеличением дальности до ракеты.
При прерываниях процесса сопровождения ракеты (пеленгатор ракеты вырабатывает признак "сигнал=0", ключ 1 размыкается, см. фиг.4) управление ракетой осуществляется по прогнозированному движению ракеты относительно линии визирования. Коэффициенты фильтрации k1(n) и k2(n) при прерываниях процесса сопровождения обнуляют, коэффициенты корреляции ошибок оценивания и ошибок экстраполяции вычисляют как при наличии, так и при отсутствии признака сигнала.
Так как методические ошибки прогнозирования достаточно малы, то при отсутствии сигнала пеленгатора на ракету подается такая же команда управления, как и при наличии сигнала и невозмущенном движении ракеты. Таким образом, предложенный способ управления обеспечивает подачу программной команды на ракету, в том числе команды "торможения", при отсутствии сопровождения ракеты. При прерываниях сигнала пеленгатора точность наведения ракеты существенно повышается, по сравнению с аналогами, система управления становится практически нечувствительной к кратковременным прерываниям ("мерцанию" сигнала).
Таким образом, предложенное техническое решение обеспечивает повышение точности и надежности системы управления ракетой, а также уменьшает непоражаемую зону ракетного комплекса.
Источники информации
1. А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. -М.: Машиностроение, 1965.
2. "Изделие 1А26М1. Техническое описание." ПБА3.035.005-02 ТО1. Часть1, 1997.
3. В. А. Бессекерский, Е.П. Попов. Теория систем автоматического регулирования. -.М.: Наука, 1966.
4. Ф.К. Неупокоев. Стрельба зенитными ракетами. -М.: Воениздат, 1980.
5. Е. А. Федосов, В.Т. Бобронников, М.Н. Красильщиков, В.И. Кухтенко и др. Динамическое проектирование систем управления автоматических маневренных летательных аппаратов. - М.: Машиностроение, 1997, с.221-233.
6. К. Брамер, Г. Зифлинг. Фильтр Калмана-Бьюсси. - М.: Наука, 1982.
7. Э.П. Сэйдж, Ч.С. Уайт. Оптимальное управление системами. -М.: Радио и связь, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280227C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ НА МАРШЕВОМ УЧАСТКЕ ПОЛЕТА | 2002 |
|
RU2213323C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ ЗАПУСКА УПРАВЛЯЕМОЙ РАКЕТЫ С ОПТИЧЕСКИМ ТЕЛЕНАВЕДЕНИЕМ | 2000 |
|
RU2193154C2 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
Изобретение относится к области ракетной техники и предназначается преимущественно для использования в оптических системах телеуправления ракетами с разгонным двигателем. Технический результат - повышение точности и надежности системы управления, а также уменьшение непоражаемой зоны ракетного комплекса. Поставленная задача достигается тем, что в способе командного телеуправления ракетой, включающем пуск ракеты под углом Е к линии визирования цели и вывод ракеты на линию визирования цели, измерение отклонения ракеты относительно линии визирования h, определение оценок отклонения ракеты  и производной отклонения
и производной отклонения  формирование сигнала коррекции по отклонению ракеты относительно линии визирования и вычисление ускорения ракеты U, пропорционального сигналу коррекции, сигнал коррекции λF вырабатывают по определенному закону. При этом угол пуска Е и функцию f(t) выбирают таким образом, чтобы на участке вывода ракеты на линию визирования цели обеспечивался угол между продольной осью ракеты и линией визирования ракеты не менее половины углового размера дымового шлейфа ракеты. 1 з.п.ф-лы, 5 ил.
формирование сигнала коррекции по отклонению ракеты относительно линии визирования и вычисление ускорения ракеты U, пропорционального сигналу коррекции, сигнал коррекции λF вырабатывают по определенному закону. При этом угол пуска Е и функцию f(t) выбирают таким образом, чтобы на участке вывода ракеты на линию визирования цели обеспечивался угол между продольной осью ракеты и линией визирования ракеты не менее половины углового размера дымового шлейфа ракеты. 1 з.п.ф-лы, 5 ил.
 и производной отклонения
и производной отклонения  по формулам
по формулам
где U - ускорение ракеты относительно линии визирования;
k1, k2 - коэффициенты фильтрации,
формирование сигнала коррекции по отклонению ракеты относительно линии визирования и вычисление ускорения ракеты U, пропорционального сигналу коррекции, отличающийся тем, что сигнал коррекции вырабатывают пропорционально линейной комбинации оценок отклонения  и производной отклонения
и производной отклонения  и ограничивают по абсолютной величине, при этом угол пуска Е и величину ограничения выбирают таким образом, чтобы на участке вывода ракеты на линию визирования цели обеспечивался угол между продольной осью ракеты и линией визирования ракеты не менее половины углового размера дымового шлейфа ракеты.
и ограничивают по абсолютной величине, при этом угол пуска Е и величину ограничения выбирают таким образом, чтобы на участке вывода ракеты на линию визирования цели обеспечивался угол между продольной осью ракеты и линией визирования ракеты не менее половины углового размера дымового шлейфа ракеты. и производной отклонения
и производной отклонения  ракеты осуществляют по формулам
ракеты осуществляют по формулам

| ФЕДОСОВ Е.А | |||
| и др | |||
| Динамическое проектирование систем управления автоматических летательных аппаратов | |||
| - М.: Машиностроение, 1987, с.221-233 | |||
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ И РАКЕТНЫЙ КОМПЛЕКС | 1997 |
|
RU2124177C1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИЦИОННЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ НА ОСНОВЕ НИТРИДА КРЕМНИЯ | 2017 |
|
RU2647540C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |

