Изобретение относится к области авиационной техники и может быть использовано в системах управления и наведения беспилотных летательных аппаратов (БПЛА): управляемых ракет, корректируемых авиабомб и других аппаратов класса «воздух - поверхность».
Известен способ управления полетом ракеты класса «воздух-поверхность» с пассивным самонаведением, заключающийся в наведении ее на цель по сигналам, характеризующим относительное движение ракеты и цели, измеряемым гиростабилизированным координатором цели, при этом в начале наведения фиксируется положение точки слежения и контролируется величина ее текущего отклонения от зафиксированного положения, и, при превышении величиной отклонения допустимого значения, производится прерывание слежения и коррекция положения точки слежения, при этом управление ракетой в период прерывания слежения производится по вычисленным сигналам, также известно устройство для осуществления этого способа управления, содержащее головку самонаведения, включающую в себя гиростабилизированный координатор цели, автопилот и корректор положения точки слежения, выбранные в качестве прототипа [1].
Основным недостатком известного способа управления является недостаточное повышение эффективности ракеты (БПЛА) из-за возможной потери управления ракетой при неустойчивом слежении за целью, вследствие того что в процессе автономного полета не производится оценка величины суммарного перемещения точки слежения, не определяется факт выхода ее за контур цели (потери цели), и процесс самонаведения в случае потери цели не прерывается. Поэтому в большинстве случаев при неустойчивом слежении движение БПЛА направлено в сторону от цели.
При создании заявленного изобретения поставлена задача повышения эффективности БПЛА путем обеспечения избирательного наведения, т.е. наведения в предварительно выбранную точку в первоначальном ограниченном поле слежения внутри контура протяженной (крупноразмерной) цели, и, при нарушении устойчивого слежения, в обеспечении наведения на точку, лежащую внутри контура цели, а при потере цели, - сохранения управляемости БПЛА и недопущения выхода точки слежения за контур цели.
Избирательное наведение в заявленном способе управления БПЛА основано на реализации принципа, по которому в замкнутом контуре слежения при движении БПЛА к цели ошибка системы наведения уменьшается и стремится к нулю или к минимальной фиксированной величине. Возрастание сигнала ошибки в интервале времени, достаточном для ее устранения, является основным признаком перенацеливания (изменения положения точки слежения) или потери цели (размыкания контура слежения), и, таким образом, по характеру изменения сигналов ошибки (сигналов управления, вырабатываемых координатором цели) можно оценить состояние координатора цели: «следит - не следит» [2].
Сохранение управляемости БПЛА при неустойчивом слежении внутри контура цели основано на создании контура наведения, замкнутого через условную точку слежения, расположенную внутри контура цели вблизи первоначально выбранной, и замены самонаведения на цель наведением БПЛА в эту точку по прямолинейной траектории с проведением периодических попыток захвата новой, лежащей вблизи условной, точки внутри контура цели с последующим восстановлением самонаведения в эту точку.
Для оценки состояния слежения в заявленном способе управления используются заранее выбранные, постоянные значения допустимых угловых перемещений линии визирования. По мере уменьшения дальности до цели при постоянном угле отклонения линии визирования линейный размер перемещения точки слежения на местности уменьшается. При этом для повышения вероятности захвата новой точки после потери цели на траектории целесообразно, при постоянной величине углового отклонения линии визирования, сохранить постоянной и величину линейного отклонения точки слежения на местности, для чего можно использовать изменение углового масштаба отображения цели при каждой последующей попытке захвата цели пропорционально изменению текущей дальности.
Для реализации поставленной задачи в известном способе управления полетом самонаводящегося БПЛА класса «воздух-поверхность», заключающемся в том, что первоначально выбирают точку слежения внутри контура отображенной цели, в процессе автономного полета измеряют параметры относительного движения БПЛА и точки слежения и обеспечивают движение БПЛА в направлении точки слежения в соответствии с измеренными параметрами, при этом вычисляют величину отклонения точки слежения от первоначального положения и на ограниченном интервале времени сравнивают ее с пороговым значением, при превышении которого прекращают измерение параметров относительного движения, прогнозируют параметры относительного движения и производят движение БПЛА по прогнозируемым параметрам, восстанавливают точку слежения в положение, соответствующее началу отклонения путем принудительной коррекции, и возобновляют измерение и движение БПЛА в соответствии с измеренными параметрами, отличающийся тем, что дополнительно в автономном полете вычисляют текущую дальность до цели и коэффициент масштабирования, определяющий величину изменения углового отображения цели, и обеспечивают избирательное наведение, для чего задают ограниченную зону слежения вокруг первоначально выбранной точки цели, устанавливают внутри этой зоны пороговые значения величин отклонения точки слежения, характеризующие: первое - начало отклонения и начало первого ограниченного интервала времени и второе - выход за пределы ограниченной зоны слежения за первый ограниченный интервал времени, длительность этого интервала и максимальное количество N повторных принудительных коррекций и производят сравнение величины отклонения точки слежения от первоначально выбранного положения с указанными пороговыми значениями, и, в случае отклонения точки слежения в течение первого интервала времени за пределы второго порогового значения, восстанавливают положение точки слежения путем последовательно проводимых n≤N принудительных коррекций, после каждой из которых, до тех пор пока n<N, проверяют устойчивость слежения в указанной зоне путем определения величины отклонения положения точки слежения от ее первоначального положения за первый интервал времени и сравнения его со вторым пороговым значением и, если величина отклонения находится в пределах этого порогового значения, фиксируют факт избирательного наведения, обнуляют число n и обеспечивают движение БПЛА по измеренным параметрам относительного движения, а если величина отклонения выходит за пределы второго порогового значения, фиксируют факт неустойчивого слежения внутри ограниченной зоны, прекращают измерение параметров относительного движения, восстанавливают положение точки слежения путем принудительной коррекции и при отсутствии устойчивого слежения после проведения n=N коррекций внутри выбранной зоны фиксируют факт прекращения избирательного наведения и обеспечивают наведение в контур цели, для чего расширяют вышеуказанную зону слежения до границ контура цели, задают третье, увеличенное, по сравнению с предыдущими, пороговое значение отклонения точки слежения за второй ограниченный, больший по сравнению с предыдущим, интервал времени, а также длительность этого интервала и максимальное количество М повторных принудительных коррекций, и, в случае отклонения точки слежения от ее первоначального положения за пределы третьего порогового значения за второй ограниченный интервал времени, восстанавливают положение точки слежения путем проведения m≤М последовательных принудительных коррекций, после каждой из которых, до тех пор пока m<М, проверяют устойчивость слежения в контуре цели путем определения величины отклонения точки слежения от ее первоначального положения за второй интервал времени и сравнения ее с третьим пороговым значением, если величина отклонения находится в пределах этого порогового значения, фиксируют факт наведения в контур цели, обнуляют числа m и n и обеспечивают движение БПЛА по измеренным параметрам относительного движения, а если величина отклонения выходит за его пределы, фиксируют факт неустойчивого слежения внутри контура цели, прекращают измерение параметров относительного движения, восстанавливают положение точки слежения путем принудительной коррекции, и при отсутствии устойчивого слежения после проведения m=М коррекций фиксируют факт потери цели и не допускают выход точки слежения за контур цели, для чего прерывают слежение за целью и заменяют самонаведение принудительным движением БПЛА в направлении условной точки слежения, для чего фиксируют ось координатора цели в направлении на первоначально выбранную точку слежения и получают на этом направлении внутри контура цели условную точку слежения, совмещают продольную ось БПЛА с осью координатора цели, задают четвертое пороговое значение, определяющее начало полета по прямолинейной траектории, определяют начало участка прямолинейного полета, для чего сравнивают величину угла между продольной осью БПЛА и осью координатора цели с четвертым пороговым значением, и если абсолютное значение этого угла становится меньше порогового значения, фиксируют начало прямолинейного полета БПЛА в направлении цели и величину текущей дальности, задают коэффициент масштабирования и обеспечивают прямолинейный полет, в процессе которого производят попытки захвата новой точки внутри контура цели, для чего задают третий и четвертый ограниченные интервалы времени, причем начало третьего интервала совпадает с моментом возобновления слежения и моментом начала прямолинейного полета, и пятое пороговое значение отклонения точки слежения, превышение которого в течение третьего интервала времени означает отсутствие захвата новой точки внутри контура цели, и возобновляют процесс слежения и измерения величины отклонения точки слежения от положения условной точки слежения на третьем ограниченном интервале времени и сравнения ее с пятым пороговым значением, определяющим наличие устойчивого слежения за новой точкой внутри контура цели, лежащей в области, ограниченной величиной отклонения, равной пятому пороговому значению, с центром, совпадающим с положением условной точки слежения, и, если величина отклонения на третьем интервале времени не превышает пятое пороговое значение, фиксируют факт захвата цели и обеспечивают самонаведение БПЛА в новую точку слежения, а если превышает - фиксируют факт отсутствия захвата цели, прекращают слежение и измерение, принудительно восстанавливают фиксированное положение оси координатора цели и через четвертый интервал времени, начало которого совпадает с моментом окончания принудительной коррекции, возобновляют слежение, измерение и сравнение, при этом по мере уменьшения дальности до цели в каждой последующей попытке захвата сохраняют примерное постоянство линейного отклонения точки слежения внутри контура цели, для чего в момент возобновления слежения вычисляют коэффициент масштабирования и изменяют угловой масштаб отображения цели в координаторе, причем в период проведения ряда последовательных попыток захвата цели и восстановления положения оси координатора цели управление движением БПЛА производят по измеренным параметрам относительного движения БПЛА и условной точки слежения.
При избирательном наведении и наведении в контур цели в качестве прогнозируемых параметров относительного движения БПЛА и точки слежения используют значения параметров в момент начала отклонения, а при определении величины отклонения положения точки слежения используют вычисленные в измерительных плоскостях углы отклонения оси координатора от ее положения в момент начала отклонения.
По мере уменьшения дальности до цели для вычисления коэффициентов масштабирования в прямолинейном полете используют соотношение текущих дальностей по линии БПЛА - цель в момент начала прямолинейного полета и в момент начала каждой последующей попытки захвата новой точки на поверхности цели.
Технический результат, достигаемый при осуществлении указанного выше способа, обеспечивается при использовании устройства, содержащего контур наведения БПЛА на выбранную точку слежения, включающий БПЛА с координатором цели, включающим измеритель положения точки слежения и стабилизатор оси координатора цели, блок управления и стабилизации и корректор положения точки слежения, причем выход координатора цели соединен с первым входом корректора положения точки слежения, второй вход которого соединен с выходом измерителя положения точки слежения, третий - с первым выходом блока управления и стабилизации, четвертый вход корректора и первый вход блока управления и стабилизации соединены с информационными выходами носителя, первый выход корректора положения точки слежения соединен со вторым входом блока управления и стабилизации, а второй - со входом стабилизатора оси координатора цели.
В отличие от известного, контур наведения БПЛА на выбранную точку слежения дополнительно снабжен блоком оценки состояния слежения, а само устройство - контуром наведения БПЛА на условную точку слежения, образованным выше указанными блоком управления и стабилизации, стабилизатором оси координатора цели, корректором положения точки слежения, блоком оценки состояния слежения и дополнительно введенными блоком формирования сигналов от условной точки слежения и блоком замыкания контура наведения на условную точку слежения, причем первый вход блока оценки состояния слежения соединен с выходом координатора цели, а второй, третий и четвертый - с третьим, четвертым и пятым выходами корректора положения точки слежения, пятый вход блока оценки состояния слежения соединен со вторым выходом блока управления и стабилизации, а шестой - с информационным выходом носителя, первый выход блока оценки состояния слежения соединен со входом измерителя положения точки слежения, второй - с пятым входом корректора положения точки слежения, третий - с шестым входом корректора положения точки слежения и первым входом блока замыкания контура наведения на условную точку слежения, четвертый - с седьмым входом корректора положения точки слежения и вторым входом блока замыкания контура наведения на условную точку слежения, пятый - с первым входом блока формирования сигналов от условной точки слежения, шестой - со вторым входом блока формирования сигналов от условной точки слежения, восьмым входом корректора положения точки слежения, третьим входом блока управления и стабилизации и третьим входом блока замыкания контура наведения на условную точку слежения, седьмой - с девятым входом корректора положения точки слежения, третьим входом блока формирования сигналов от условной точки слежения и четвертым входом блока замыкания контура наведения на условную точку слежения, пятый вход которого соединен с выходом блока формирования сигналов от условной точки слежения, а выход - с десятым входом корректора положения точки слежения, при этом отдельные входы корректора положения точки слежения, блока оценки состояния слежения и блока замыкания контура наведения на условную точку слежения подключены к таймеру.
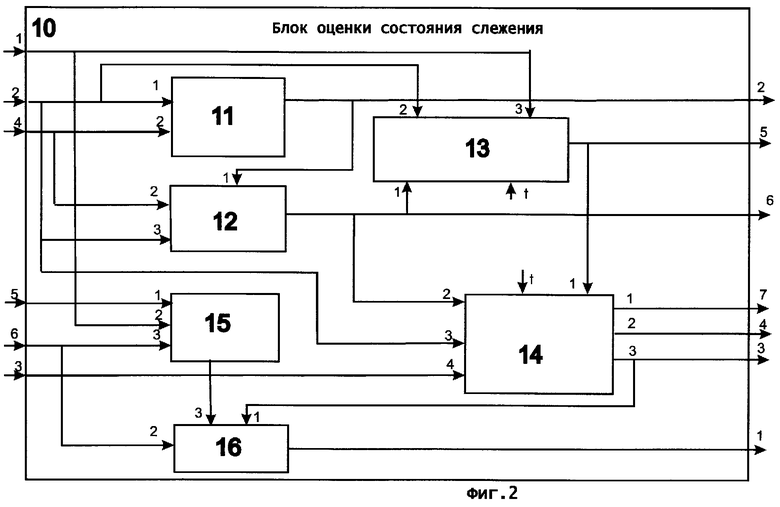
При этом блок оценки состояния слежения включает в себя блок формирования команды «Наведение в контур цели», блок формирования команды «Потеря цели», блок формирования команды «Прямолинейный полет», блок сравнения, блок вычисления текущей дальности и блок вычисления коэффициентов масштабирования, причем первый и второй входы блока формирования команды «Наведение в контур цели» являются вторым и четвертым входами блока оценки состояния слежения соответственно, а выход, являющийся вторым выходом блока оценки состояния слежения, соединен с первым входом блока формирования команды «Потеря цели», второй вход которого является четвертым, третий - вторым входами блока оценки состояния слежения, а выход, являющийся шестым выходом блока оценки состояния слежения, соединен с первым входом блока формирования команды «Прямолинейный полет», второй вход которого является вторым, а третий - первым входами блока оценки состояния слежения, а выход является пятым выходом блока оценки состояния слежения и соединен с первым входом блока сравнения, второй вход которого соединен с выходом блока формирования команды «Потеря цели», третий - является вторым, четвертый - третьим входами блока оценки состояния слежения, первый выход блока сравнения является седьмым, второй - четвертым, а третий - третьим выходом блока оценки состояния слежения и соединен с первым входом блока вычисления коэффициентов масштабирования, второй вход которого является шестым входом блока оценки состояния слежения, а третий - соединен с выходом блока вычисления текущей дальности, первый вход которого является пятым, второй - первым, а третий - шестым входами блока оценки состояния слежения, выход блока вычисления коэффициентов масштабирования является первым выходом блока оценки состояния слежения, при этом отдельные входы блока сравнения и блока формирования команды «Прямолинейный полет» подключены к таймеру.
Сущность изобретения поясняется графическими материалами.
На фиг.1 показана блок-схема устройства управления БПЛА класса «воздух-поверхность» с пассивным самонаведением в предварительно выбранную точку слежения.
На фиг.2 показана блок-схема блока оценки состояния слежения.
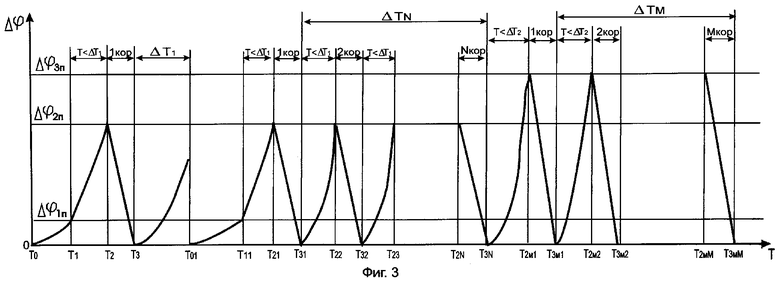
На фиг.3 приведены графики, иллюстрирующие возможный вариант изменения вычисленных углов отклонения стабилизатора оси координатора цели и соответствующая этим изменениям циклограмма работы заявленного устройства до выдачи команды «Потеря цели».
Ось Т - текущее время;
Ось Δϕ - вычисленный угол отклонения стабилизатора оси координатора цели от направления на первоначально выбранную точку слежения;
Δϕ1п - первое пороговое значение отклонения;
Δϕ2п - второе пороговое значение отклонения;
Δϕ3п - третье пороговое значение отклонения;
ΔT1 - первый ограниченный интервал времени проверки устойчивости слежения в ограниченной зоне;
ΔТ2 - второй ограниченный интервал времени проверки устойчивости слежения внутри контура цели;
Ткор - время коррекции положения точки слежения;
Т0 - начало работы устройства;
T1 - превышение первого порогового значения, начало первого ограниченного интервала времени ΔТ1;
Т2 - превышение второго порогового значения, начало первой коррекции n=1;
Т3 - окончание первой коррекции, начало проверки устойчивости слежения;
t01 - окончание интервала ΔT1, слежение устойчиво, n=0, продолжение избирательного наведения;
Т11 - превышение первого порогового значения, начало первого ограниченного интервала времени ΔT1;
Т21 - превышение второго порогового значения, начало первой коррекции n=1;
Т31 - окончание первой коррекции, начало проверки устойчивости слежения;
Т22 - превышение второго порогового значения, начало второй коррекции n=2;
Т32 - окончание второй коррекции, начало проверки устойчивости слежения;
Т23 - превышение второго порогового значения, начало третьей коррекции n=3;
Т2N - превышение второго порогового значения, окончание избирательного наведения, начало N коррекции n=N;
Т3N - окончание N коррекции, возобновление слежения внутри контура цели и сравнения с третьим пороговым значением;
ΔТN - проверка устойчивости слежения в малой зоне;
Т2м1 - превышение третьего порогового значения, начало первой коррекции m=1;
Т3м1 - окончание первой коррекции, начало проверки устойчивости слежения;
Т2м2 - превышение третьего порогового значения, начало второй коррекции m=2;
Т3м2 - окончание второй коррекции, начало проверки устойчивости слежения;
Т2мМ - превышение третьего порогового значения, окончание наведения в контур цели, начало М коррекции, m=М;
Т3мМ - окончание М коррекции, прерывание самонаведения.
ΔТМ - проверка устойчивости слежения внутри контура цели.
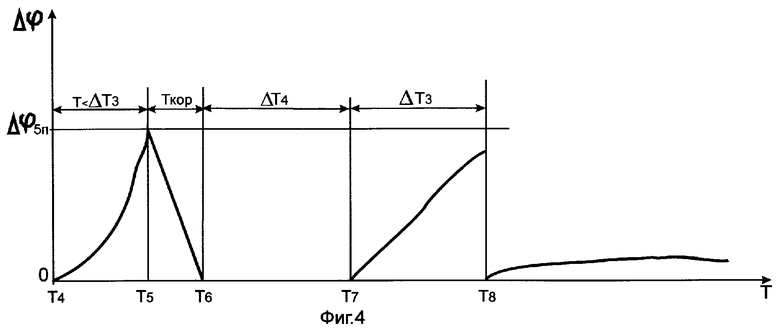
На фиг.4 приведены графики, иллюстрирующие возможные варианты изменения вычисленных углов отклонения стабилизатора оси координатора цели и соответствующая этим изменениям циклограмма работы заявленного устройства после выдачи команды «Потеря цели».
Ось Т - текущее время;
Ось Δϕ - вычисленный угол отклонения стабилизатора оси координатора цели от направления на условную точку слежения;
Δϕ5п - пятое пороговое значение отклонения;
ΔТ3 - третий ограниченный интервал времени проверки устойчивости захвата новой точки внутри контура цели;
ΔТ4 - четвертый ограниченный интервал времени наведения на условную цель;
Ткор - время коррекции положения точки слежения;
Т4 - выдача команды «Прямолинейный полет» и задание Км1;
Т5 - превышение порога Δϕ5, начало принудительной коррекции положения точки слежения;
Т6 - окончание принудительной коррекции, выдача команды «Нет цели»;
Т7 - выдача команды «Поиск цели», вычисление коэффициента масштабирования Км2;
T8 - выдача команды «Цель», начало слежения за новой точкой.
Т>T8 - наведение на новую точку слежения.
На фиг.5 приведены схемы, иллюстрирующие изменение соотношения величин угловых отклонений линии визирования и линейных отклонений точки слежения на местности по мере уменьшения дальности до цели, а также коэффициента масштабирования.
Ось D - дальность до цели, направлена на условную точку слежения;
ось L - линейное отклонение точки слежения от направления на условную точку слежения;
α1, α2, α3 - углы отклонения стабилизатора оси координатора цели от направления на условную точку слежения;
L0, L1, L2, L3 - линейные отклонения точки слежения внутри контура цели (КЦ) от положения условной точки слежения;


Км1, Км2, Км3 - коэффициенты масштабирования;
Kм1=1; 

Δϕ5п - пятое пороговое значение.
В точке 1, дальность до цели D1, формируется команда «Прямолинейный полет» и задается коэффициент масштабирования Kм1;
В точке 2, дальность до цели D2, формируется команда «Поиск цели» и вычисляется коэффициент масштабирования Км2;
В точке 3, дальность до цели D3, формируется команда «Поиск цели» и вычисляется коэффициент масштабирования Км3;
На фиг.6 приведены условное изображение контура цели (КЦ), расположенные внутри него первоначально выбранная точка слежения (Т), малая зона слежения (МЗС) и условная точка слежения (У), а также траектории полета БПЛА в вертикальной и горизонтальной плоскостях и точки его падения ПА и ПВ.
Пунктиром обозначены траектории А полета БПЛА, управление движением которого после потери цели производится известным из прототипа способом, и точка его падения ПА.
Штрихпунктиром обозначены траектории В полета БПЛА, управление движением которого после потери цели производится способом, осуществляемым согласно изобретению, на траекториях нанесены точка К, соответствующая моменту выдачи команды «Потеря цели», и точка П, соответствующая моменту выдачи команды «Прямолинейный полет», а также точка его падения ПВ.
Устройство для реализации заявленного способа управления (см. фиг.1) содержит контур наведения БПЛА в выбранную точку слежения 1, включающий выбранную точку слежения (не показана), БПЛА (не показан) с координатором цели 2, включающим измеритель положения точки слежения 3, стабилизатор оси координатора цели 4 и таймер (не показан), блок 5 управления и стабилизации, корректор 6 положения точки слежения и блок оценки состояния слежения 10, и контур наведения БПЛА на условную точку слежения 7, включающий БПЛА (не показан) с координатором цели 2, включающим стабилизатор оси координатора цели 4 и таймер (не показан), блок 5, корректор 6, блок 8 формирования сигналов от условно выбранной точки слежения, блок 9 замыкания контура наведения на условно выбранную точку слежения и блок 10 оценки состояния слежения, включающий в себя (см. фиг.2) блок 11 формирования команды «Наведение в контур цели», блок 12 формирования команды «Потеря цели», блок 13 формирования команды «Прямолинейный полет», блок 14 сравнения, блок 15 вычисления текущей дальности и блок 16 вычисления коэффициентов масштабирования.
Контур наведения БПЛА в выбранную точку слежения применительно к заявленному устройству до потери цели координатором осуществляет следующие функции:
- избирательное наведение БПЛА в выбранную точку слежения;
- определение факта окончания избирательного наведения и начала наведения в контур цели;
- наведения БПЛА в контур цели;
- определения факта потери цели.
Контур наведения БПЛА на условную точку слежения применительно к заявленному устройству при потере цели координатором осуществляет следующие функции:
- управляемое движение БПЛА в сторону цели;
- поиск новой точки слежения внутри контура цели;
- определение факта захвата новой точки слежения внутри контура цели и восстановления самонаведения в эту точку.
Координатор цели 2 применительно к заявленному устройству осуществляет измерение сигналов относительного движения БПЛА и точки слежения и вырабатывает сигналы управления БПЛА.
Измеритель положения точки слежения 3 применительно к заявленному устройству вырабатывает сигналы управления стабилизатором оси координатора цели 4. Выходы измерителя положения точки слежения 3 являются выходами координатора цели 2 и соединены с соответствующими входами корректора 6 положения точки слежения.
Стабилизатор оси координатора цели 4 применительно к заявленному устройству вырабатывает сигналы управления БПЛА. Выходы стабилизатора оси координатора цели 4 являются выходами координатора цели 2 по измеренным сигналам относительного движения БПЛА и точки слежения и соединены с соответствующими входами корректора 6 и блока 10 оценки состояния слежения.
Блок 5 управления и стабилизации применительно к заявленному устройству осуществляет функции формирования управляющих команд в процессе автономного полета и отклонений органов управления БПЛА.
Входы блока 5 соединены:
- по предпусковой информации - с носителем (не показан);
- по сигналам управления БПЛА - с выходом корректора 6;
- по команде «Потеря цели» - с выходом блока 10 оценки состояния слежения.
Выходы блока 5 соединены:
- по управляющим командам с соответствующим входом корректора 6;
- по параметрам движения БПЛА - с соответствующим входом блока 10.
Отклонения органов управления БПЛА формируют его движение по траектории.
Корректор 6 положения точки слежения применительно к заявленному устройству осуществляет следующие функции:
- формирование пороговых значений параметров в соответствии с информацией с носителя;
- контроль величины отклонения точки слежения;
- фиксирование величины недопустимого отклонения и выдачу команды «Коррекция»;
- прогнозирование значений параметров относительного движения на период перерыва слежения и отсутствия измерения;
- формирование сигналов управления стабилизатором оси координатора цели при коррекции;
- восстановление путем принудительной коррекции положения точки слежения,
- формирование сигналов управления БПЛА при коррекции;
- формирование входной информации для блока оценки состояния слежения;
- переключение сигналов управления стабилизатором оси координатора цели.
Входы корректора 6 положения точки слежения соединены:
- по предпусковой информации - с носителем (не показан);
- по командам «Наведение в контур цели», «Потеря цели», «Поиск цели», «Нет цели», «Цель» - с соответствующими выходами блока 10 оценки состояния слежения;
- по сигналам управления стабилизатором оси координатора от условной точки слежения - с выходом блока 9 замыкания контура наведения на условную точку слежения;
- с таймером.
Выходы корректора 6 положения точки слежения соединены:
- по команде «Коррекция», параметрам положения точки слежения, пороговым значениям параметров - с соответствующими входами блока 10 оценки состояния слежения;
- по сигналам управления стабилизатором оси координатора со стабилизатором оси координатора цели 4;
Блок 8 формирования сигналов от условной точки слежения применительно к заявленному устройству осуществляет формирование сигналов управления стабилизатором оси координатора цели 4 с момента прекращения самонаведения на выбранную точку слежения до момента восстановления самонаведения в новую точку внутри контура цели.
Входы блока 8 по командам «Потеря цели», «Нет цели» и «Прямолинейный полет» соединены с соответствующими входами блока 10 оценки состояния слежения.
Выход блока 8 по сигналам управления стабилизатором оси координатора от условной точки слежения соединен со входом блока 9 замыкания контура наведения на условную точку слежения.
Блок 9 замыкания контура наведения на условную точку слежения применительно к заявленному устройству осуществляет функции подключения сигналов управления стабилизатором оси координатора от условной точки слежения для осуществления управления им после потери цели в промежутках времени между попытками захвата новой точки внутри контура цели до восстановления самонаведения в эту точку.
Выход блока 9 по сигналам управления стабилизатором оси координатора от условной точки слежения соединен с соответствующим входом корректора 6 положения точки слежения.
Блок 10 оценки состояния слежения применительно к заявленному устройству осуществляет следующие функции.
В контуре наведения БПЛА на выбранную точку слежения:
- определение факта окончания избирательного наведения;
- определение факта потери цели.
- формирования команд «Наведение в контур цели», «Потеря цели».
В контуре наведения БПЛА на условную точку слежения:
- определение факта начала прямолинейного движения БПЛА в сторону цели;
- определение моментов начала проведения поиска цели;
- определения факта отсутствия захвата новой точки после проведения поиска цели;
- определение факта восстановления самонаведения в новую точку слежения внутри контура цели;
- формирования команд «Поиск цели», «Нет цели», «Цель».
Кроме указанных выше, блок 10 имеет вход по измеренным сигналам относительного движения БПЛА и точки слежения, который соединен с выходом координатора цели 2, отдельный его вход подключен к таймеру.
Выходы блока 10 по командам «Потеря цели», «Поиск цели», «Нет цели», «Цель» соединены также с соответствующими входами блока 9 замыкания контура наведения на условную точку слежения, а по сигналам коэффициентов масштабирования - с соответствующим входом координатора цели 2.
Блок 11 формирования команды «Наведение в контур цели» применительно к заявленному изобретению выполняет следующие функции:
- определения факта выхода из ограниченной зоны слежения;
- формирование команды «Наведение в контур цели».
Входы блока 11 по пороговым значениям параметров и команде «Коррекция» являются соответствующими выходами блока 10.
Выход блока 11 по команде «Наведение в контур цели» соединен с соответствующим входом блока 12 формирования команды «Потеря цели» а также является одним из выходов блока 10 оценки состояния слежения.
Блок 12 формирования команды «Потеря цели» применительно к заявленному изобретению выполняет следующие функции:
- определения факта выхода точки слежения за пределы контура цели (потери цели);
- формирование команды «Потеря цели».
Входы блока 12 по пороговым значениям параметров и команде «Коррекция» являются соответствующими входами блока 10.
Выход блока 12 по команде «Потеря цели» соединен со входами блока 13 формирования команды «Прямолинейный полет» и блока 14 сравнения и является соответствующим выходом блока 10.
Блок 13 формирования команды «Прямолинейный полет» применительно к заявленному изобретению выполняет функцию определения факта начала прямолинейного движения БПЛА в сторону цели.
Входы блока 13 по пороговым значениям параметров и измеренным сигналам относительного движения являются соответствующими входами блока 10, один из его входов подключен к таймеру.
Выход блока 13 по команде «Прямолинейный полет» соединен с соответствующим входом блока 14 сравнения и является одним из выходов блока 10.
Блок 14 сравнения применительно к заявленному изобретению выполняет следующие функции:
- определение моментов начала проведения поиска цели;
- оценку устойчивости захвата новой точки внутри контура цели;
- определение факта восстановления самонаведения в новую точку внутри контура цели;
- формирования команд «Поиск цели», «Нет цели», «Цель».
Входы блока 14 по пороговым значениям параметров и параметрам положения точки слежения являются соответствующими входами блока 10, еще один из его входов подключен к таймеру.
Выход блока 14 по команде «Поиск цели» соединен с соответствующим входом блока 16 вычисления коэффициентов масштабирования, выходы по командам «Поиск цели», «Нет цели» и «Цель» являются соответствующими выходами блока 10.
Блок 15 вычисления текущей дальности применительно к заявленному изобретению выполняет функцию вычисления текущей дальности до цели.
Входы блока 15 по параметрам движения БПЛА и начальной информации с носителя являются соответствующими входами блока 10.
Выход блока 15 по параметру текущей дальности соединен со входом блока 16.
Блок 16 вычисления коэффициентов масштабирования применительно к заявленному изобретению выполняет функцию вычисления коэффициентов углового масштабирования отображения цели.
Выход блока 16 по коэффициентам масштабирования является соответствующим выходом блока 10.
Перед пуском на борт БПЛА с носителя поступает следующая информация:
- в блок 15 вычисления текущей дальности - скорость носителя (Vo) и дальность пуска по линии носитель - цель (Do);
- в корректор 6 положения точки слежения и в блок 5 управления и стабилизации - команды, характеризующие характер изменения параметров движения БПЛА после пуска.
По информации с носителя в корректоре 6 выбираются время начала работы устройства, длительности интервалов анализа, пороговые значения величин отклонения точки слежения, длительность интервала вычисления математического ожидания сигналов управления стабилизатором оси координатора цели, а также максимальное число повторных коррекций при наведении в выбранную точку (ΔТ1, Δϕ1П, Δϕ2П, ΔТmо и N) и при наведении в контур цели (ΔТ2, Δϕ3П и М), которые могут корректироваться на траектории по управляющим командам, поступающим из блока 5.
Кроме того, в корректоре 6 формируются пороговое значение величины угла между осью БПЛА и осью координатора цели (Δϕ4П), величин отклонения точки слежения (Δϕ5П) и длительности интервалов анализа при движении БПЛА по прямолинейной траектории (ΔТ3), а также интервала времени между последовательными попытками захвата новой точки слежения (ΔТ4).
После пуска БПЛА управляется по непосредственно измеренным значениям сигналов относительного движения.
С момента пуска из блока 5 на соответствующие входы блока 15 поступают сигналы линейной перегрузки БПЛА по оси Х (nх).
Вычисление текущей дальности в блоке 15 производится по формуле:
С момента начала работы устройства начинается вычисление значений математического ожидания (moy(z)) измеренных сигналов управления СУуизм и СУzизм на текущем ограниченном интервале времени ΔТmо. Одновременно начинается вычисление углов отклонения стабилизатора оси координатора цели в его измерительных плоскостях Δϕ1у(z) от его среднего положения по формуле:

Вычисленные значения углов Δϕ1у(z) сравниваются с порогом Δϕ1п, определяющим начало отклонения точки слежения от первоначально выбранной точки внутри ограниченной зоны слежения.
Если величина Δϕ1у(z) не превышает порог Δϕ1П, наведение БПЛА происходит в выбранную перед пуском точку внутри контура цели, реакции корректора 6 не требуется и управление БПЛА осуществляется традиционным способом.
При превышении величиной Δϕ1у(z) порога Δϕ1П (см. фиг.3) с момента T1 превышения в корректоре 6 начинается отсчет интервала ΔТ1, запоминаются значения математического ожидания сигналов управления в момент Т1 - moy(z)o и вычисляются прогнозируемые значения сигналов управления БПЛА.
С момента T1 вычисление углов отклонения стабилизатора производится по формуле:

Ситуация, при которой величина Δϕ2у(z) в течение интервала ΔТ1 не превысит пороговое значение Δϕ2П, означает допустимое отклонение точки слежения внутри ограниченной зоны. В этом случае вмешательства корректора не требуется, БПЛА управляется традиционным способом. По окончании интервала ΔT1 в корректоре 6 производится обнуление величин Δϕ2у(z), и начинается новый цикл вычислений углов отклонения по формуле (2).
Превышение величиной Δϕ2у(z) до окончания интервала ΔТ1 порога Δϕ2П означает выход точки слежения за пределы ограниченной зоны, требующий вмешательства корректора. В этом случае в момент Т2 превышения порога Δϕ2П в корректоре 6 выполняются следующие операции:
- формируется команда «Коррекция» и передается в блок 11 формирования команды «Наведение в контур цели»;
- запоминаются значения углов отклонения Δϕ2у(z)-Δϕ2у(z)o;
- формируются сигналы управления стабилизатором оси координатора цели при коррекции СУу(z)кор по следующему алгоритму:

ΔТкор - время коррекции;
- измеренные сигналы управления стабилизатором оси координатора цели СУу(z)изм переключаются на сигналы коррекции СУу(z)кор;
- сигналы управления БПЛА переключаются с измеренных на прогнозируемые.
По команде «Коррекция» в блоке 11 начинается отсчет числа проведенных коррекций: n=1.
По окончании коррекции сигналы СУу(z)кор переключаются на сигналы СУу(z)изм, и начинается режим проверки устойчивости слежения в ограниченной зоне.
На интервале проверки устойчивости слежения ΔT1 вычисляются углы отклонения Δϕ3у(z) по формуле:

Если величина Δϕ3у(z) в течение интервала ΔT1 не превысит пороговое значение Δϕ2П, фиксируют факт избирательного наведения. По окончании интервала ΔТ1 производится обнуление величин Δϕ3у(z) и начинается новый цикл вычислений углов Δϕ1у(z) по формуле (2), счетчик числа коррекций приводится в исходное состояние (n=0), сигналы управления БПЛА переключаются с прогнозируемых на измеренные, и БПЛА управляется традиционным способом.
При превышении величиной Δϕ3у(z) порога Δϕ2П до окончания интервала ΔT1 в блоке 11 величина количества коррекций n увеличивается на единицу и сравнивается с пороговым значением N, а в корректоре 6 формируются сигналы коррекции СУу(z)кор по формуле (4), и сигналы управления СУу(z)изм переключаются на сигналы коррекции СУу(z)кор.
По окончании коррекции производится переключение сигналов СУу(z)кор на сигналы СУу(z)изм, и корректор 6 вновь переходит в режим проверки устойчивости слежения.
Подтверждение устойчивости слежения в коррекции, номер которой n<N, означает факт избирательного наведения; по окончании интервала времени ΔT1 счетчик числа коррекций приводится в исходное состояние (n=0), углы отклонения Δϕу(z) вычисляются по формуле (2), сигналы управления БПЛА переключаются с прогнозируемых на измеренные и БПЛА управляется традиционным способом.
Если устойчивость слежения не подтверждена в коррекции, номер которой n=N, после ее окончания в блоке 11 формируется команда «Наведение в контур цели», по которой в блоке 12 формирования команды «Потеря цели» число m становится равным 1, а в корректоре 6 изменяются пороговые значения и временные интервалы, используемые для оценки состояния слежения, и с этого момента начинается вычисление углов Δϕ3у(z) по формуле (5) и сравнение их с пороговым значение Δϕ3П на интервале времени ΔТ2.
Если величина Δϕ3у(z) в течение интервала ΔТ2 ни в одном из каналов не превысит пороговое значение Δϕ3П, фиксируют факт наведения в контур цели. По окончании интервала ΔТ2 производится обнуление величин Δϕ3у(z), и начинается новый цикл вычислений углов Δϕ1у(z) по формуле (2), счетчик числа коррекций приводятся в исходное состояние (n=0, m=0), сигналы управления БПЛА переключаются с прогнозируемых на измеренные и БПЛА управляется традиционным способом.
При превышении величиной Δϕ3у(z) порога Δϕ3П в течение интервала ΔТ2,\ в блоке 12 величина количества коррекций m увеличивается на единицу и сравнивается с пороговым значением M, в корректоре 6 формируются сигналы коррекции СУу(z)кор по формуле (6), а сигналы управления СУу(z)изм переключаются на сигналы коррекции СУу(z)кор.
По окончании коррекции производится переключение сигналов СУу(z)кор на сигналы СУу(z)изм, и корректор 6 вновь переходит в режим проверки устойчивости слежения.
Подтверждение устойчивости слежения в коррекции, номер которой m<М, означает факт наведения в контур цели; по окончании интервала времени ΔT2 счетчики числа коррекций приводятся в исходное состояние (n=0, m=0), углы отклонения Δϕу(z) вычисляются по формуле (2), сигналы управления БПЛА переключаются с прогнозируемых на измеренные и БПЛА управляется традиционным способом.
Если устойчивость слежения не подтверждена в коррекции, номер которой m=М, после ее окончания фиксируется факт прекращения слежения внутри контура выбранной цели (потеря цели), в блоке 12 формируется команда «Потеря цели», по которой (см. фиг.4):
- прерывается самонаведение БПЛА на цель;
- в блоке 8 формирования сигналов от условной цели вырабатываются сигналы управления стабилизатором оси координатора от условной цели,
- в блоке 10 оценки состояния слежения формируются пороговые значения Δϕ4п Δϕ5п и временные интервалы ΔТ3 и ΔТ4, используемые для оценки факта восстановления самонаведения (захвата цели);
- из блока 9 замыкания контура наведения на условную цель выдаются сигналы управления стабилизатором оси координатора, обеспечивающие установку оси координатора цели в фиксированное положение в направлении на первоначально выбранную точку слежения, и передаются через корректор 6 на стабилизатор оси координатора цели;
- в блоке 5 управления и стабилизации формируется управление БПЛА, обеспечивающее разворот оси БПЛА до совмещения ее с осью координатора цели;
- в блоке 13 формирования команды «Прямолинейный полет» начинается сравнение модуля угла ϕ между осями БПЛА и координатора цели с пороговым значением ϕ4п.
В процессе отработки управляющих сигналов, подаваемых на БПЛА и на стабилизатор оси координатора цели, оси БПЛА и координатора цели сближаются. В момент Т4, когда абсолютное значение угла ϕ становится меньше порогового значения Δϕ4П, в блоке 13 формируется команда «Прямолинейный полет», по которой:
- в блоке 15 вычисления текущей дальности фиксируется значение D1;
- в блоке 16 вычисления коэффициентов масштабирования задается коэффициент Км=1;
- в корректоре 6 сигналы управления, сформированные в блоке 8 и подаваемые на стабилизатор оси координатора цели, переключаются на измеренные.
С этого момента в корректоре 6 начинается вычисление углов Δϕ4у(z) по формуле (7)
и в блоке 14 сравнения сравнение их с пороговым значение Δϕ5п на интервале времени ΔТ3.
Если величина углов отклонения от направления на условную точку слежения в течение интервала интегрирования ΔТ3 не превысит пороговое значение Δϕ5п, фиксируют факт восстановления самонаведения (захвата цели), в блоке 10 формируется команда «Цель», по которой в корректоре 6 начинается оценка устойчивости слежения за новой точкой, при этом наведение БПЛА в контур цели производится по измеренным параметрам относительного движения БПЛА и реальной цели.
Если величина углов отклонения от направления на условную цель в течение интервала интегрирования ΔТ3 превысит пороговое значение Δϕ4П, фиксируют факт отсутствия захвата цели, блок 10 выдает команду «Нет цели», по которой в блоке 8 формируются сигналы от условной цели, обеспечивающие фиксированное положение оси координатора, в блоке 9 замыкается контур наведения на условную цель, в корректоре 6 запоминаются значения углов отклонения Δϕ4у(z)o, формируются сигналы коррекции по формуле (8):
измеренные сигналы управления переключаются на сигналы коррекции и восстанавливается фиксированное положение оси координатора цели.
По окончании коррекции сигналы коррекции в корректоре 6 переключаются на сигналы управления от условной цели.
Через интервал времени ΔТ4 в блоке 14 формируется команда «Поиск цели», по которой:
- в блоке 15 вычисления текущей дальности фиксируется значение D2,
- в блоке 16 вычисления коэффициентов масштабирования вычисляется коэффициент Км по формуле:
в соответствии с которым в координаторе цели производится изменение углового масштаба отображения цели;
- в блоке 9 размыкается контур наведения на условную цель;
- в корректоре 6 сигналы управления стабилизатором оси координатора переключаются на измеренные и возобновляется вычисление угла отклонения Δϕ4у(z) по формуле (7);
- в блоке 14 начинается сравнение вычисленного угла отклонения с пороговым значением и т.д.
Указанные операции повторяются в каждой последующей попытке захвата новой точки, при этом с целью сохранения примерного постоянства линейного отклонения точки слежения внутри контура цели изменяется угловой масштаб отображения цели (см. фиг.5). Управление движением БПЛА на всем участке прямолинейного полета до захвата цели производят по измеренным параметрам относительного движения БПЛА и условной точки слежения, а после захвата - по измеренным параметрам относительного движения БПЛА и новой точки слежения.
Точка падения БПЛА (ПВ) (см. фиг.6), управление движением которым после потери цели осуществляется способом согласно изобретению, практически всегда лежит внутри контура цели в непосредственной близости от первоначально выбранной, а точка падения БПЛА (ПА), управление движением которым после потери цели осуществляется известным из прототипа способом, в большинстве случаев находится вне контура цели, причем расстояние от нее до первоначально выбранной является величиной произвольной.
Литература.
1. «Способ и устройство управления полетом ракеты класса «воздух-поверхность» с пассивным самонаведением», патент РФ №2112699 от 10.06.98 г., В 64 С 19/00.
2. А.А.Лебедев и В.А.Карабанов. «Динамика систем управления беспилотными летательными аппаратами», М.: Машиностроение, 1965, стр.424-432.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ КЛАССА "ВОЗДУХ - ПОВЕРХНОСТЬ" С ПАССИВНЫМ САМОНАВЕДЕНИЕМ | 1997 |
|
RU2112699C1 |
| Способ наведения беспилотного летательного аппарата | 2018 |
|
RU2691902C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
Изобретение относится к авиационной технике и может быть использовано в системах управления беспилотных летательных аппаратов (БПЛА) с координатором цели и пассивным самонаведением. Согласно предлагаемому способу, выбирают точку слежения (ТС) внутри контура цели и измеряют параметры движения БПЛА относительно этой точки. В автономном полете БПЛА обеспечивают его избирательное наведение, задавая вокруг первоначально выбранной ТС ограниченную зону слежения с определенным множеством пороговых значений и соответствующих им интервалов времени. При выходе ТС за эти пороги восстанавливают ее положение принудительными коррекциями. Если после некоторого числа таких коррекций слежение в указанной зоне неустойчиво, то возвращаются от избирательного наведения к наведению в контур цели, проводя некоторое число повторных коррекций ТС. Если слежение вновь неустойчиво, то фиксируют факт потери цели, не допуская выход ТС за контур цели. При этом заменяют самонаведение принудительным движением БПЛА в направлении условной ТС по прямолинейной траектории, фиксируя ось координатора цели в направлении на первоначально выбранную ТС. В это время производят попытки захвата новой ТС внутри контура цели. В случае успеха обеспечивают самонаведение БПЛА в новую ТС. При неустойчивом слежении фиксируют факт отсутствия захвата цели и принудительно восстанавливают фиксированное положение оси координатора цели. По мере уменьшения дальности до цели в каждой последующей попытке захвата сохраняют примерное постоянство линейного отклонения ТС внутри контура цели. Предлагается соответствующая приборная реализация способа. Технический результат изобретения состоит в повышении эффективности БПЛА путем его избирательного наведения в точки контура цели, а также сохранения, при потери цели, управляемости БПЛА и недопущения выхода ТС за контур цели. 2 н. и 4 з.п. ф-лы, 6 ил.
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ КЛАССА "ВОЗДУХ - ПОВЕРХНОСТЬ" С ПАССИВНЫМ САМОНАВЕДЕНИЕМ | 1997 |
|
RU2112699C1 |
| ЛЕБЕДЕВ А.А | |||
| и КАРАБАНОВ В.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| М.: Машиностроение, 1965, с.424-432 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ КОРРЕКТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192604C1 |
| СПОСОБ ФОРМИРОВАНИЯ И ПРОВЕРКИ ПОДЛИННОСТИ КОЛЛЕКТИВНОЙ ЭЛЕКТРОННОЙ ЦИФРОВОЙ ПОДПИСИ, ЗАВЕРЯЮЩЕЙ ЭЛЕКТРОННЫЙ ДОКУМЕНТ | 2011 |
|
RU2450438C1 |

