Изобретение относится к области ракетной техники и может быть использовано в системах управления авиационных ракет класса "воздух- поверхность".
Известен способ управления полетом самонаводящейся ракеты класса "воздух-поверхность", заключающийся в обеспечении движения ракеты по направлению "точка пуска - цель" в зависимости от измеряемых значений углов пеленга в вертикальной и горизонтальной плоскостях и угла тангажа или угловых скоростей линии визирования в вертикальной и горизонтальной плоскостях, а также от значений перегрузки в каналах управления. [Справочник. Зуенко Ю.А. "Боевые самолеты России", 1994 г., М., с. 154, 155, 158 или Каталог. Под. ред. Дейнекина П. "Оружие России", т. 2. "Авиационная техника и вооружение военно-воздушных сил", 1996г., М., с. 248, 249 -прототип].
Из указанных источников информации известно устройство для осуществления способа управления полетом самонаводящейся ракеты класса "воздух-поверхность", содержащее головку самонаведения и автопилот, включающий в себя блок формирования заданных перегрузок, датчики угла тангажа и перегрузок в каналах управления, а также датчики угла крена или угловой скорости в канале крена.
Недостаток известных способа и устройства заключается в низкой эффективности управления полетом ракеты при потере цели головкой самонаведения, что влечет за собой падение ракеты внутри круга, центром которого является точка пуска, а радиусом - максимальная баллистическая дальность. Возможность произвольного места падения в случае потери цели приводит к следующим негативным результатам:
в мирное время к невозможности проводить летные испытания и учебно-боевые стрельбы ракеты на полигонах ограниченных (малых) размеров;
в военное время к возможности падения ракеты на собственную территорию.
При использовании заявленных изобретений обеспечивается достижение технического результата, заключающегося в обеспечении управляемого полета ракеты при потере цели головкой самонаведения и тем самым уменьшения площади поверхности места возможного падения ракеты.
Для достижения указанного результата в известном способе управления полетом самонаводящейся ракеты класса "воздух-поверхность", заключающемся в обеспечении движения ракеты по направлению "точка пуска-цель" в зависимости от измеряемых значений углов пеленга в вертикальной и горизонтальной плоскостях и угла тангажа или угловых скоростей линии визирования в вертикальной и горизонтальной плоскостях, а также от значения перегрузки в каналах управления, дополнительно определяют текущие параметры движения ракеты в пространстве, вычисляют пороговые значения этих параметров и сравнивают их между собой, при этом движение ракеты при нахождении текущих параметров ее движения в пределах пороговых значений осуществляют по непосредственно измеренным значениям углов пеленга и угла тангажа или угловых скоростей линии визирования, а также перегрузок в каналах управления, а при выходе хотя бы одного из текущих параметров движения ракеты за пределы порогового значения движение ракеты осуществляют в направлении пикирования с последующим возвращением ее в направлении "точка пуска - цель".
Частным случаем реализации заявленного изобретения является такой способ управления, при котором в качестве текущих параметров движения ракеты в пространстве используют вычисленные отклонения ракеты от направления "точка пуска-цель" в горизонтальной плоскости, дальность отлета ракеты от точки пуска в направлении цели, угол разворота вектора скорости ракеты в горизонтальной плоскости, а также измеренные угол тангажа, время полета ракеты на участках траектории в полное время полета.
Эффективность и точность управления ракетой повышаются, если в процессе движения осуществляют стабилизацию ракеты относительно ее продольной оси по углу крена или угловой скорости крена.
Технический результат, достигаемый при осуществлении указанного выше способа, обеспечивается при использовании устройства, содержащего головку самонаведения и автопилот, включающий в себя блок формирования заданных перегрузок, датчики угла тангажа и перегрузок в каналах управления, а также датчики угла крена или угловой скорости в канале крена, новизна которого заключается в том, что оно имеет блок определения текущих параметров движения и положения ракеты, блок сравнения, формирователь текущих пороговых значений, блок формирования сигналов управления при потере цели и блок переключения сигналов управления, причем одна группа входов блока определения текущих параметров движения и положения ракеты соединена с измерительными выходами автопилота, другая группа его входов - с измерительными выходами головки самонаведения, а выходы - с первой группой входов блока сравнения и информационными входами блока формирования сигналов управления при потере цели, другой информационный вход которого подключен к соответствующему выходу автопилота, управляющие входы блока формирования сигналов управления при потере цели, блока переключения сигналов управления и автопилота подключены к выходу блока сравнения, вторая группа входов блока сравнения связана с выходами формирователя текущих пороговых значений, входы которого соединены с информационными выходами носителя, головки самонаведения и автопилота, при этом основные выходы блока формирования сигналов управления при потере цели и головки самонаведения через блок переключения сигналов управления связаны с автопилотом.
Для обеспечения различных режимов выведения ракеты из полета в соответствии с ложными сигналами управления, выдаваемыми потерявшей цель головкой, устройство имеет переключатель режимов, подключенный к блоку сравнения, формирователю текущих пороговых значений и блоку формирования сигналов управления при потере цели. Примером таких режимов могут являться режимы "мир" или "война", формируемые таким образом, чтобы в военное время обеспечить полет потерявшей цель ракеты в направлении цели, а в мирное время - обеспечить перевод ракеты в пикирование и возврат к линии "точка пуска - цель" с целью самоликвидации в окрестностях этой линии.
На фиг. 1 показана блок-схема устройства управления полетом самонаводящейся ракеты класса "воздух-поверхность"; на фиг. 2 приведены графики, иллюстрирующие заданные перегрузки в каналах управления и траектории полета потерявшей цель ракеты в горизонтальной и вертикальной плоскостях, управление полетом которой осуществляется известным способом, выбранным в качестве прототипа; на фиг. 3 приведены графики, иллюстрирующие заданные перегрузки в каналах управления и траектории полета потерявшей цель ракеты в горизонтальной и вертикальной плоскостях, управление полетом которой осуществляется предложенным способом; на фиг. 4 приведены условные зоны падения потерявшей цель ракеты, управление полетом которой производится известным из прототипа образом и способом, осуществляемым согласно изобретению.
Устройство управления полетом самонаводящейся ракеты класса "воздух-поверхность" (см. фиг. 1) содержит головку самонаведения 1, автопилот 2, включающий в себя блок формирования заданных перегрузок, и не показанные на чертеже датчики угла тангажа и перегрузок в каналах управления, датчики угла крена (или угловой скорости в канале крена), блок 3 определения текущих параметров движения и положения ракеты, блок сравнения 4, формирователь 5 текущих пороговых значений, блок 6 формирования сигналов управления при потере цели, блок 7 переключения сигналов управления и переключатель режимов (на чертеже не показан). В заявленном устройстве головка самонаведения 1 осуществляет следующие функции:
измерение пеленга в вертикальной плоскости ϕyг. ;
измерение пеленга в горизонтальной плоскости ϕzг. ;
измерение угловой скорости линии визирования в вертикальной плоскости  ;
;
измерение угловой скорости линии визирования в горизонтальной плоскости  .
.
Выходы головки самонаведения 1 по указанным параметрам подключены к соответствующим входам блока 7 переключения сигналов управления.
Автопилот 2 применительно к заявленному устройству осуществляет следующие функции:
формирование команд "Готов", "Управление", "БН";
измерение перегрузки по основным каналам управления nI, nII;
измерение угла тангажа ϑ ;
измерение угла крена γ или угловой скорости в канале крена ωx ;
формирование заданных перегрузок в каналах управления nзадI, nзадII; Командные выходы автопилота "Управление" и "Готов" подключены к командным входам блоков 3, 4, 5.
Измерительные выходы автопилота 2 по параметрам nI nII, ϑ, , γ подключены к первой группе входов блока 3 определения текущих параметров движения и положения ракеты.
Выходы автопилота 2 по параметрам nзадI, nзадII являются выходами устройства и подключены к исполнительным органам ракеты (на чертеже не показаны).
Выход автопилота 2 по каналу измерения угла тангажа ϑ связан с одним из входов блока 6 формирования сигналов, управления при потере цели.
Вторая группа входов блока 3 определения текущих параметров движения и положения ракеты подключена к таймеру (на чертеже не показан) по каналу синхронизации времени t и к выходу головки самонаведения 1 по каналу информации об угле пеленга в горизонтальной плоскости ϕz0 на момент пуска.
Выходы блока 3 определения текущих параметров движения и положения ракеты подключены по каналам угла разворота вектора скорости в горизонтальной плоскости Ψвыч , отклонения ракеты от линии "точка пуска - цель" в горизонтальной плоскости Zвыч, дальности отлета ракеты от точки пуска вдоль линии "точка пуска - цель" Xвыч, угла тангажа ϑ к первым входам блока 4 сравнения.
Другие входы блока 4 сравнения по каналам пороговых значений Ψвычпор ; Zвычпор, Xвычпор, ϑпор и tпор подключены к соответствующим выходам формирователя 5 текущих пороговых значений.
Входы формирователя 5 по каналам способа управления ракетой при пуске "ДН - БН" и дальности до цели "ЦД - ЦБ" подключены к выходу носителя (на чертеже не показан), по каналу угла пеленга в горизонтальной плоскости ϕz0 на момент пуска - к головке самонаведения 1 и по команде изменения способа управления в процессе автономного полета "БН" - к автопилоту 2.
Выход блока сравнения 4 по каналу потери цели "ПЦ" подключен к управляющим входам блока 8 формирования сигналов управления при потере цели, блока 7 переключения сигналов управления и автопилота 2.
Другие входы блока 6 формирования сигналов управления при потере цели по каналам угла разворота вектора скорости в горизонтальной плоскости Ψвыч и отклонения ракеты от линии "точка пуска - цель" в горизонтальной плоскости Zвыч связаны с соответствующими выходами блока 3 определения текущих параметров движения и положения ракеты.
Выходы блока 6 формирования сигналов управления при потере цели по каналам  и
и  подключены ко входам блока 7 переключателя сигналов управления, выходы которого по каналам
подключены ко входам блока 7 переключателя сигналов управления, выходы которого по каналам  и
и  и каналам
и каналам  подключены к соответствующим входам автопилота 2.
подключены к соответствующим входам автопилота 2.
Блок сравнения 4, формирователь 5 текущих пороговых значений, блок 6 формирования сигналов управления при потере цели подключены к переключателю режимов (на чертеже не показан).
Головка самонаведения 1 и блоки 3, 4 и 6 подключены к таймеру (на чертеже не показан).
Перед пуском ракеты на формирователь 5 текущих пороговых значений поступают команды с носителя, дающие информацию о дальности до цели "Цель дальняя" ("ЦД") или "Цель ближняя" ("ЦБ"), выбранном способе управления: по углам пеленга в вертикальной ϕY и горизонтальной ϕZ плоскостях и углу тангажа ϑ (команде "Дальнее наведение" ("ДН") или по угловым скоростям линии визирования в вертикальной  и горизонтальной
и горизонтальной  плоскостях - команда "Ближнее наведение" ("БН"), из головки самонаведения 1 - о величине угла пеленга в горизонтальной плоскости "ϕz0" в момент пуска ракеты и с переключателя режимов, определяющего состояния мирного или военного времени "М" или "В". По совокупности поступающих команд выбираются пороговые значения анализируемых параметров движения ракеты, которые корректируются на траектории при изменении способа управления движением ракеты с управления по углам пеленга и тангажа на управление по угловым скоростям линии визирования (команда "БН").
плоскостях - команда "Ближнее наведение" ("БН"), из головки самонаведения 1 - о величине угла пеленга в горизонтальной плоскости "ϕz0" в момент пуска ракеты и с переключателя режимов, определяющего состояния мирного или военного времени "М" или "В". По совокупности поступающих команд выбираются пороговые значения анализируемых параметров движения ракеты, которые корректируются на траектории при изменении способа управления движением ракеты с управления по углам пеленга и тангажа на управление по угловым скоростям линии визирования (команда "БН").
После пуска ракета управляется по непосредственно измеренным значениям углов пеленга и тангажа или угловых скоростей линии визирования.
Включение блока определения текущих параметров движения и положения производится в момент включения управления tвклупр и с этого момента начинается вычисление текущих значений угла разворота вектора скорости ракеты в горизонтальной плоскости Ψвыч , отклонения ракеты от направления "точка пуска - цель" в горизонтальной плоскости Zвыч и дальности отлета ракеты от точки пуска в направлении цели Xвыч по следующему алгоритму:
где
ϕzo - угол пеленга в горизонтальной плоскости в момент пуска ракеты, передается из ГСН;
nII, nI - текущие перегрузки ракеты в каналах управления, измеренные датчиками автопилота;
Kv1 ( γ t), Kv2(t) - переменные коэффициенты, пропорциональные осредненному значению текущей скорости ракеты, заложены в память БЦВМ;
t - текущее время;
γ - текущее значение угла крена, измеренное датчиком угла крена (ДУК) или интеграл угловой скорости крена, измеренной датчиком угловой скорости (ДУС).
Вычисленные текущие сигналы Ψвыч = , Zвыч, Xвыч, а также измеренные в автопилоте 2 сигнал ϑ и таймером время полета ракеты на участках траектории и на всей траектории поступают на блок сравнения 4, работающий по схеме "или", которым производится сравнение этих сигналов с их пороговыми значениями. При выходе величины хотя бы одного из анализируемых сигналов за его пороговое значение блоком сравнения 4, выдается команда "Потеря цели" ("ПЦ"), по которой в блоке 6 формирования сигналов управления при потере цели начинается формирование управляющих сигналов  и
и  , в блоке 7 переключения сигналов управления производится переключение сигналов, подаваемых в блок формирования заданных перегруперегрузок автопилота 2, с непосредственно измеренных
, в блоке 7 переключения сигналов управления производится переключение сигналов, подаваемых в блок формирования заданных перегруперегрузок автопилота 2, с непосредственно измеренных  на сигналы эквивалентные угловым скоростям линии визирования
на сигналы эквивалентные угловым скоростям линии визирования  , а в блоке формирования заданных перегрузок в случае, если команда "ПЦ" была выдана при управлении ракетой по углам пеленга и углу тангажа, формируется команда "БН", по которой изменяется способ управления ракетой на управление по угловым скоростям линии визирования.
, а в блоке формирования заданных перегрузок в случае, если команда "ПЦ" была выдана при управлении ракетой по углам пеленга и углу тангажа, формируется команда "БН", по которой изменяется способ управления ракетой на управление по угловым скоростям линии визирования.
Сигналы  и
и  формируются по программе, представленной на фиг. 2
формируются по программе, представленной на фиг. 2
От момента tпц до момента начала выдачи сигналов на пикирование tпик в течение интервала времени (см. фиг. 2) Δt0 сигналы  обеспечивают формирование нулевых заданных перегрузок в каналах управления nI,IIзад = 0 с целью обеспечения в этом интервале времени сохранения направления полета ракеты, что необходимо при срабатывании логического устройства в непосредственной близости от цели.
обеспечивают формирование нулевых заданных перегрузок в каналах управления nI,IIзад = 0 с целью обеспечения в этом интервале времени сохранения направления полета ракеты, что необходимо при срабатывании логического устройства в непосредственной близости от цели.
На времени tпик = tпц + Δt0 формируются сигналы  обеспечивающие перевод ракеты в пикирование с максимально возможной перегрузкой, длительность действия которых определяется временем Δtϑ , необходимым для разворота ракеты на угол тангажа ϑпик .
обеспечивающие перевод ракеты в пикирование с максимально возможной перегрузкой, длительность действия которых определяется временем Δtϑ , необходимым для разворота ракеты на угол тангажа ϑпик .
По окончании разворота на пикирование на времени tϑ = tп + Δtϑ формируются сигналы  , обеспечивающие разворот ракеты в горизонтальной плоскости с максимально возможной перегрузкой в направлении линии точка пуска - цель. Длительность времени разворота Δtψ определяется достижением углом Ψвыч , значения (-Ψвыч) при потере цели, а знак сигнала
, обеспечивающие разворот ракеты в горизонтальной плоскости с максимально возможной перегрузкой в направлении линии точка пуска - цель. Длительность времени разворота Δtψ определяется достижением углом Ψвыч , значения (-Ψвыч) при потере цели, а знак сигнала  противоположен знаку Zвыч в момент потери цели.
противоположен знаку Zвыч в момент потери цели.
На времени tψ = tϑ+Δtψ формируются сигналы  , обеспечивающие движение с нулевой перегрузкой до соударения с землей.
, обеспечивающие движение с нулевой перегрузкой до соударения с землей.
По команде "В", начиная с момента tпц, формируются сигналы управления  , обеспечивающие движение ракеты с нулевыми перегрузками, и полет в сторону противника до момента соударения с землей.
, обеспечивающие движение ракеты с нулевыми перегрузками, и полет в сторону противника до момента соударения с землей.
В соответствии с описанным способом управления устройство управления работает следующим образом.
Перед пуском ракеты по сформированной в автопилоте команде "Готов", означающей готовность агрегатов ракеты к пуску, в блоке 5 запоминаются команды, пришедшие с носителя "БН" или "ДН", "ЦД" или "ЦБ", значение угла пеленга в горизонтальной плоскости в момент пуска "ϕz0" и положение переключателя "М - В" - "М" или "В"; в блоке 4 - положение переключателя "М - В" и в блоке 3 - значение ϕz0 .
После пуска ракеты по сформированной в автопилоте команде "Управление", означающей начало управляемого полета, в блоке 3 начинается вычисление параметров движения и положения ракеты, в блоке 5 формируются пороговые значения анализируемых параметров на момент пуска, в блоке 4 начинается сравнение текущих параметров движения с их пороговыми значениями.
Логическое сравнение блока 4 сформировано по схеме "или", т.е. срабатывание происходит при превышении хотя бы одним из параметров своего порогового значения. При срабатывании устройства сравнения выдается команда "ПЦ", по которой в блоке 6 начинается формирование программы изменения управляющих сигналов  , в блоке 7 посредством ключа производится переключение цепей управляющих сигналов, поступающих в автопилот с идущих с головки самонаведения на цепи сигналов, сформированных в блоке 6, а в автопилоте 2 формируется команда, обеспечивающая формирование заданных перегрузок по этим сигналам, вне зависимости от способа формирования nзадI и nзадII до определения факта потери цели.
, в блоке 7 посредством ключа производится переключение цепей управляющих сигналов, поступающих в автопилот с идущих с головки самонаведения на цепи сигналов, сформированных в блоке 6, а в автопилоте 2 формируется команда, обеспечивающая формирование заданных перегрузок по этим сигналам, вне зависимости от способа формирования nзадI и nзадII до определения факта потери цели.
На фиг. 3 и 4 приведены траектории ракет, пущенных с высоты H0= 6 км по наземной цели с дальности D0 = 9 км с носителя, летящего горизонтально с нулевым пеленгом в горизонтальной плоскости ϕz0 = 0 со скоростью V0 = 230 м/с, с управлением по угловой скорости линии визирования, потерявших цель на 5 с полета, головки самонаведения которых после потери цели выдали ложные управляющие сигналы  = 0,1 град/г,
= 0,1 град/г,  = 0, управление которыми производилось известным способом (фиг. 2) и заявленным способом (фиг. 3).
= 0, управление которыми производилось известным способом (фиг. 2) и заявленным способом (фиг. 3).
Там же представлены заданные перегрузки ракеты, сформированные автопилотом 2 в каналах управления по поступающим в него сигналам с блока 7 переключения сигналов управления.
Как видно из представленных материалов, при известном способе управления дальность отлета потерявшей цель ракеты при соударении с землей составляет:
по дистанции Xотл= 20,5 км
в сторону от линии точка пуска-цель Zотл = 10,5 км, а при управлении заявленным способом
Xотл = 12,5 км
zотл = 1 км
На фиг. 5 представлены зоны падения (максимальные дальности отлета от точки пуска) потерявшей цель ракеты, пущенной с высоты H = 5 км со скоростью V0 = 400 м/с. Расчеты показывают, что заявленный способ управления позволяет:
в военное время исключать разворот потерявшей цель ракеты назад в сторону точки пуска и обеспечить ее полет в сторону цели;
в мирное время сократить размеры зоны падения до 7 - 12% (в зависимости от условий пуска) от зоны падения при управлении ракетой известным способом, исключив при этом падение ракеты сзади точки пуска и обеспечив тем самым стрельбу с полигонов ограниченных размеров при испытаниях и учебно-боевой подготовке летчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ КЛАССА "ВОЗДУХ - ПОВЕРХНОСТЬ" С ПАССИВНЫМ САМОНАВЕДЕНИЕМ | 1997 |
|
RU2112699C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ КЛАССА "ВОЗДУХ - ПОВЕРХНОСТЬ" | 2004 |
|
RU2254268C1 |
| Вращающаяся самонаводящаяся ракета | 2018 |
|
RU2694934C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
Изобретение относится к области ракетной техники и может быть использовано в системах упаривания авиационных ракет класса "воздух-поверхность". При использовании изобретения обеспечивается сокращение области возможного падения потерявшей цель ракеты класса "воздух-поверхность" в среднем в 10 раз. Указанный результат достигается тем, что в процессе автономного полета в специальном устройстве на борту ракеты анализируются измеренные в автопилоте и головке самонаведения, а также вычисленные в самом устройстве параметры движения ракеты в пространстве, вычисляются пороговые значения этих параметров на траектории в зависимости от условий применения, которые сравнивают между собой. Выход хотя бы одного из анализируемых параметров за пределы порогового значения означает потерю цели головкой самонаведения. В этом случае формируется гибкая программа управления ракетой, зависящая от положения ракеты в пространстве, начиная с момента определения факта потери цели головкой самонаведения до момента соударения с поверхностью земли, обеспечивающая перевод ракеты в пикирование и последующий разворот в направлении линии "точка пуска - цель". 2 с и 3 з. п. ф-лы, 5 ил.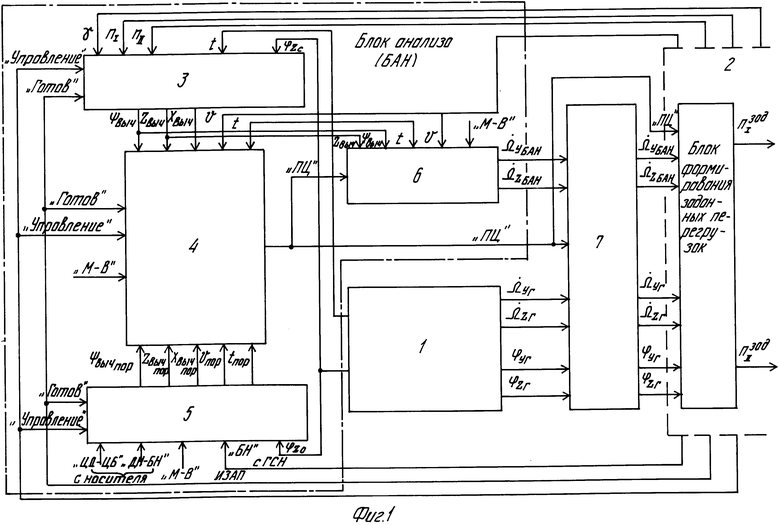
| Каталог/Под ред | |||
| Дейнекина П | |||
| Оружие России, т.2 | |||
| Авиационная техника и вооружение военно-воздушных сил.-М.: АО "Военный парад", 1966, с.248, 249. |

