Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйства, в том числе в нефтехимической и нефтеперерабывающей промышленности, в насосостроении, дозирующей технике для жидких и сыпучих продуктов и др., в качестве кривошипно-ползунных механизмов (КПМ) приводов возвратно-поступательного движения с регулированием величины хода ползуна без остановки механизма.
Известен КПМ, у которого изменение длины хода ползуна осуществляется при помощи кривошипного вала с косым шипом и посаженной на шип втулкой, соединенной с кривошипной головкой шатуна (Промышленный каталог. Дозировочные насосы. Системы измерения и регулирования, фирмы Hauke K.Y., Австрия, 1989).
Механизм состоит из корпуса с соосными неподвижной и подвижной в осевом направлении опорами, размещенными в корпусе привода, состоящего из ведущего вала-шестерни и установленного в неподвижной опоре корпуса ведомого колеса, ползуна, связанного с ним одним концом шатуна, на другом конце которого выполнена кривошипная головка с отверстием, размещенной внутри отверстия кривошипной головки втулки с отверстием, в котором размещен шип кривошипного вала, одним концом размещенного в ступице ведомого колеса с возможностью осевого перемещения и передачи крутящего момента, другим концом размещенного с возможностью вращения в подвижной в осевом направлении опоре, причем ось шипа и отверстие втулки расположены под углом к оси вращения кривошипного вала.
Основными недостатками этого механизма являются:
повышенная динамическая нагрузка на шипе кривошипного вала и втулке при работе механизма ввиду знакопеременности нагрузки на шатуне со стороны ползуна, снижающая надежность и долговечность механизма;
втулка, посаженая на шип кривошипного вала, должна быть разрезной из-за условий сборки, что снижает нагрузочную способность узла, усложняет его изготовление и сборку.
Технической задачей, поставленной в настоящем изобретении, является улучшение динамических характеристик механизма, повышение его надежности.
Это достигается тем, что в кривошипно-ползунном механизме с изменяемой длиной хода ползуна без остановки механизма, содержащем корпус с соосными неподвижной и подвижной в осевом направлении опорами, размещенные в корпусе привод, состоящий из ведущего вала-шестерни и установленного в неподвижной опоре корпуса ведомого колеса, ползун, связанный с ним одним концом шатун, на другом конце которого выполнена кривошипная головка с отверстием, размещенная в отверстии кривошипной головки шатуна втулка с эксцентричным отверстием и установленный в подвижной опоре корпуса с возможность вращения и осевого перемещения кривошипный вал, шип которого размещен в соответствующих отверстиях втулки и ступицы ведомого колеса, причем оси вращения кривошипного вала и ведомого колеса соосны, ось шипа кривошипного вала параллельна оси вращения кривошипного вала, на наружной поверхности шипа выполнена винтовая нарезка, отверстие ступицы ведомого колеса выполнено с эксцентриситетом, равным эксцентриситету кривошипного вала, в ступице выполнено эксцентричное отверстие, сообщенное с основным и соосное ему, втулка выполнена по длине ступенчатой формы в виде двух эксцентричных по отношению одна к другой ступеней, первая из которых размещена в отверстии кривошипной головки шатуна, вторая - в дополнительном эксцентричном отверстии ступицы ведомого колеса, а в отверстии втулки выполнена нарезка, ответная винтовой нарезке шипа кривошипного вала.
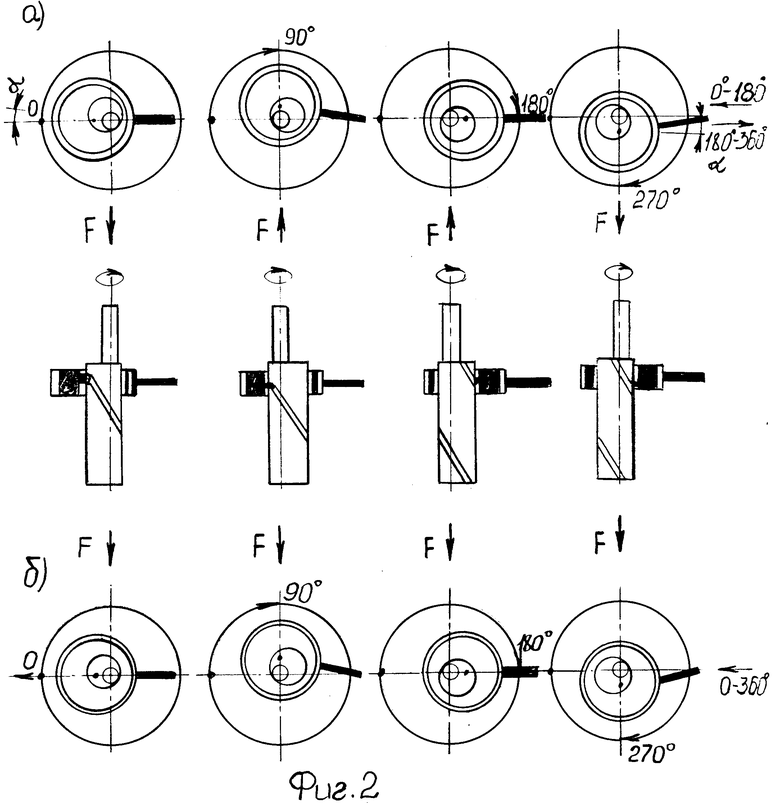
На фиг. 1 представлена конструкция КПМ; на фиг. 2 - схема работы механизма изменения длины хода ползуна: а) в случае, если внешняя сила не меняет свое направление; б) если внешняя сила меняет свое направление.
Предлагаемый КПМ (фиг. 1) состоит из корпуса 1, ведущего вала-шестерни 2, ведомого колеса 3, втулки с эксцентричным отверстием 4, кривошипного вала 5, шатуна 6, ползуна 7, подвижной опоры 8, привода 9 перемещения подвижной опоры и неподвижной опоры 10.
Опоры 8 и 10 установлены соосно. Опора 8 с помощью привода 9 моет перемещаться в направлении оси. Ступица колеса 3 опирается на опору 10 и имеет отверстие, ось которого смещена относительно оси вращения колеса на величину e, равную величине эксцентриситета кривошипного вала, а также дополнительное эксцентричное отверстие, сообщенное с основном и соосное ему.
Втулка 4 снабжена эксцентричным отверстием и выполнена по длине ступенчатой формы в виде двух эксцентричных по отношению одна к другой ступеней с эксцентриситетом, равным эксцентриситету кривошипного вала. Первая из ступеней размещена в отверстии кривошипной головки шатуна, вторая - в дополнительном эксцентричном отверстии ступицы ведомого колеса. В отверстии втулки выполнена винтовая нарезка. Втулка ограничена от перемещения в направлении оси и может вращаться в плоскости движения шатуна.
Кривошипный вал 5 состоит из цилиндрической части, соосной с опорами 8 и 10, и шипа, проходящего через отверстие втулки 4. Эксцентриситет кривошипного вала равен e. На внешней поверхности шипа выполнена винтовая нарезка, ответная винтовой нарезке втулки 4. Кривошипный вал закреплен в подвижной опоре 8 с возможностью вращения вокруг оси и перемещения в направлении оси. При перемещении опоры 8 перемещается кривошипный вал 5 в направлении оси, а втулка 4 поворачивается относительно вала, изменяя величину суммарного эксцентриситета отверстия колеса и втулки.
Механизм работает следующим образом.
Вращение от вала-шестерни 2 передается колесу 3 и связанной с ним втулке 4, приводящей в движение шатун 6. Крутящий момент колеса к втулке передается за счет наличия эксцентрично расположенного отверстия в ступице колеса, ведущего размещенные в нем втулку и проходящий в ее отверстие шип кривошипного вала. Угловое вращение кривошипного вала относительно колеса исключается из-за эксцентриситета e в системе колесо-втулка-кривошипный вал. Угловое смещение втулки относительно вала (при фиксированном положении опоры 8) исключается за счет винтового соединения втулки и кривошипного вала. В результате, изменяя на ходу положение подвижной опоры 8, можно изменять величину эксцентриситета втулки 4 относительно оси вращения механизма и тем самым изменять длину хода ползуна без остановки КПМ.
В предлагаемом КПМ сила F (фиг. 2), направленная параллельно оси вращения кривошипного вала, возникающая в винтовой паре втулка - кривошипный вал при передаче усилия привода по преодолению ползуном внешней силы P, изменяет два раза свое направление: в начале движения ползуна вперед и в начале движения ползуна назад, если внешняя сила P меняет свое направление (фиг. 2а). Сила F не меняет свое направление, если внешняя сила P не меняет свой знак на противоположный при изменении направления движения ползуна (фиг. 2б).
И в том и в другом случае сила P, приняв свое направление, не изменяет его в течение всего хода вперед или назад. Кроме этого, конструктивно отпала необходимость выполнять втулку разрезной, что упрощает ее изготовление и создает большую прочность и надежность соединения.
Кривошипно-ползунный механизм предназначен для регулирования величины хода ползуна приводов возвратно-поступательного движения без остановки механизма. Вращение от вала-шестерни передается ведомому колесу и связанной с ним эксцентриковой втулке, приводящей в движение шатун. Крутящий момент передается от колеса к втулке за счет эксцентрично расположенного отверстия в ступице колеса, а через отверстие втулки - кривошипному валу. В соединении втулка-шип кривошипного вала выполнена винтовая пара. Ось шипа кривошипного вала параллельна оси вращения кривошипного вала. Отверстие ступицы ведомого колеса выполнено с эксцентриситетом, равным эксцентриситету кривошипного вала. Изменяя на ходу положение подвижной опоры, можно менять величину эксцентриситета втулки относительно оси вращения механизма, а за счет этого изменять длину хода ползуна, что улучшает динамические характеристики механизма и повышает его надежность. 2 ил.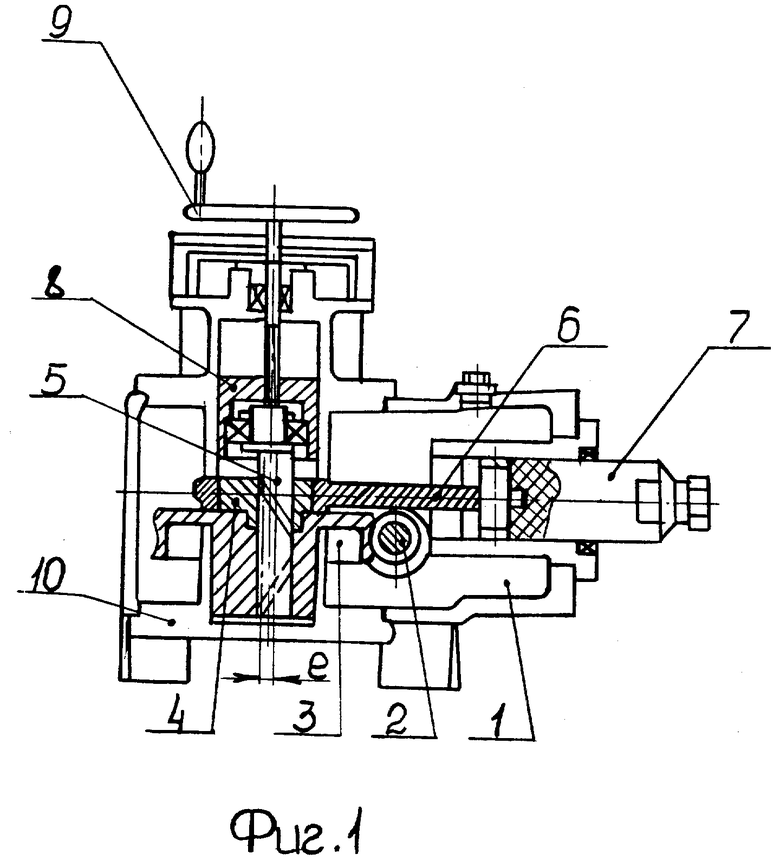
Кривошипно-ползунный механизм с изменяемой длиной хода ползуна без остановки механизма, содержащий корпус с соосными неподвижной и подвижной в осевом направлении опорами, размещенный в корпусе привод, состоящий из ведущего вала-шестерни и установленного в неподвижной опоре корпуса ведомого колеса, ползун, связанный с ним одним концом шатун, на другом конце которого выполнена кривошипная головка с отверстием, размещенная в отверстии кривошипной головки шатуна втулка с эксцентричным отверстием и установленный в подвижной опоре корпуса с возможностью вращения и осевого перемещения кривошипный вал, шип которого размещен в соответствующих отверстиях втулки и ступицы ведомого колеса, причем оси вращения кривошипного вала и ведомого колеса соосны, отличающийся тем, что ось шипа кривошипного вала параллельна оси вращения кривошипного вала, на наружной поверхности шипа выполнена винтовая нарезка, отверстие ступицы ведомого колеса выполнено с эксцентриситетом, равным эксцентриситету кривошипного вала, в ступице выполнено дополнительное эксцентричное отверстие, сообщенное с основным и соосное с ним, втулка выполнена по длине ступенчатой формы в виде двух эксцентричных по отношению одна к другой ступеней, первая из которых размещена в отверстии кривошипной головки шатуна, вторая - в дополнительном эксцентричном отверстии ступицы ведомого колеса, а в отверстии втулки выполнена винтовая нарезка, ответная винтовой нарезке шипа кривошипного вала.
| GB, патент, 1503389 от 08.03.78, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
