Изобретение относится к области машиностроения, а более конкретно к исполнительным механизмам технологических машин, например кузнечно-прессовых машин (КПМ). Наибольшее распространение среди КПМ получили кривошипные прессы с кривошипно-ползунным исполнительным механизмом (см. Ланской Е.Н, Банкетов Н.А. Элементы расчета деталей и узлов кривошипных прессов. - М.: Машиностроение, 1966). Кривошипно-ползунный механизм известных КПМ, принятый за основу, имеет следующие недостатки:
1. Выполняет преобразование вращательного движения ведущего звена - кривошипного вала - в поступательное движение ползуна с инструментом при действии на ползун номинального штамповочного усилия. Это определяет большие потери энергии, пропорциональные усилию штамповки, на трение, упругую деформацию в подвижной системе звеньев кривошипно-ползунного механизма.
Идеальный механизм - механизм, в котором номинальное ковочное усилие образуется преимущественно на выходном звене - ползуне. Остальные звенья не нагружены номинальным штамповочным усилием, подвержены существенно меньшим нагрузкам.
2. Угол нагружения ϕр кривошипного вала в известных КПМ не превышает ϕр ≤ 40°, не доходя до нижней мертвой точки (НМТ). В то же время цикловой угол равен ϕц=2π(360°). Угол холостого хода ϕх в этом случае превышает угол нагружения ϕр:
ϕx=ϕц-ϕp=360°-40°=320°
в восемь раз и является балластным углом. Углом, на котором происходит потеря энергии. В некоторых КПМ, например радиально-ковочных, листоштамповочных (вырубных), чеканочных и др., мощность холостого хода превышает 70% установленной мощности электродвигателя привода даже при ϕр ≤ 20°.
Идеальный механизм или близкий к нему тот, у которого ϕц равен по крайней мере ϕц=2ϕр.
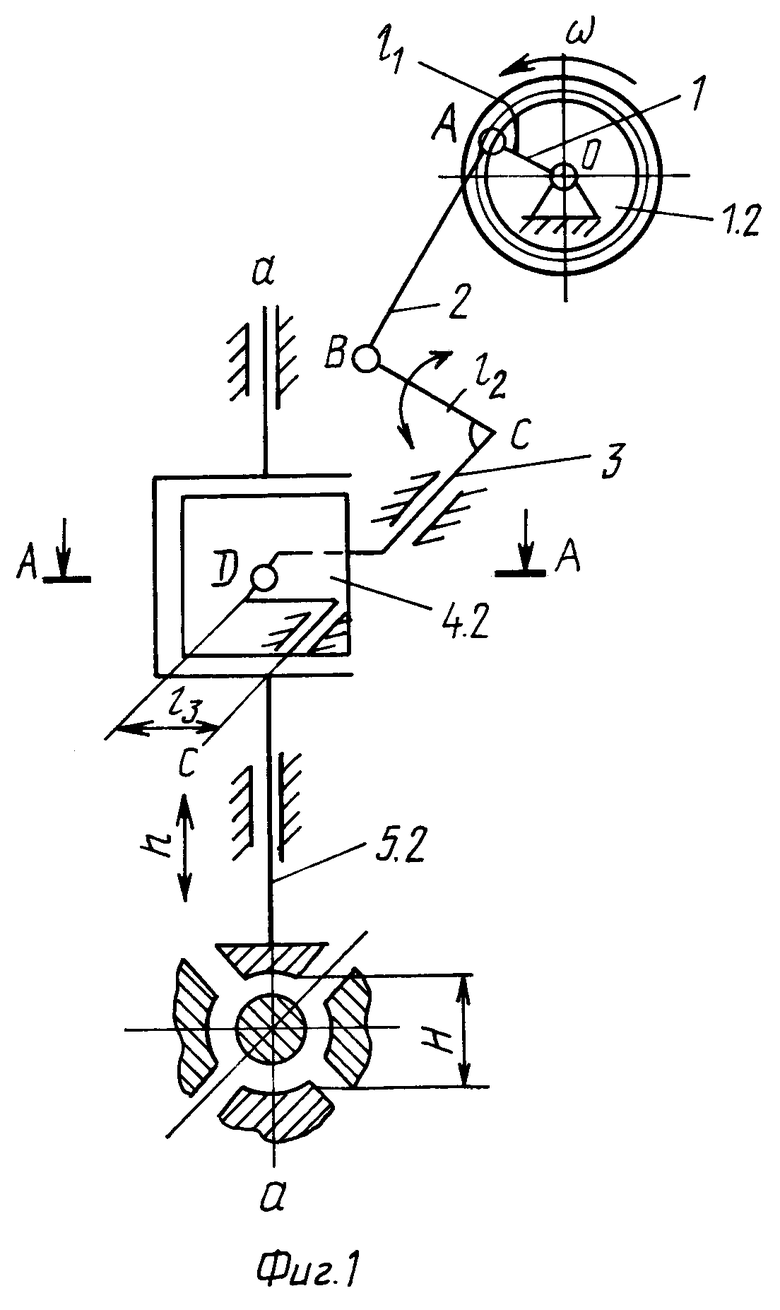
3. Связь между крутящим моментом Мкр и усилием Рн, развиваемым в кривошипно-ползунных механизмах, определяют зависимостью
Mкр=Рн(mu+mf),
откуда

где Рн - штамповочное усилие; mu - идеальное плечо, mf - плечо трения.
В НМТ (при ϕ=180°) идеальное плечо mu=0, тогда
Имеет место возможность заклинивания ползуна (кулисы) в этой точке, особенно в случае перегрузки КПМ. Заклинивание ползуна не столь редкий случай в кривошипных КПМ, особенно горячештамповочных прессах.
Исключить заклинивание - значит сделать так, чтобы идеальное плечо mu не было равно 0, т.е. mu ≠ 0.
Известен механизм (см. а.с. СССР № 541678), характерный тем, что в нем устранены первые два недостатка, указанные выше. Примем этот механизм в качестве прототипа. Цель изобретения - устранить третий - последний недостаток.
Механизм содержит две структурные группы подвижных звеньев: исполнительную группу - ИГ и приводную группу - ПГ. В ИГ входят кривошипный (эксцентриковый) вал, имеющий качательное колебательное движение. Вал посредством шатуна или кулисного камня кинематически соединен с ползуном (кулисой), который несет на себе подвижную часть штампа, в общем случае - рабочую часть инструмента, например бойки (молоты) в радиально-обжимных машинах.
В ПГ входят: кривошипный приводной вал, кинематически связанный с электроприводом (в частности, посредством зубчатой передачи-редуктора); шатун, шарнирно соединенный с рычагом длиною l2, жестко связанным с опорами главного кривошипного вала ИГ.
Таким образом, главный кривошипный вал развивает усилие, равное штамповочному Рн, но при том же времени цикла tu имеет меньшую окружную скорость V, т.к. ϕц=ϕр ≤ 40°, а не ϕц=360°, как в известных КПМ.
В то же время приводной кривошипный вал имеет ϕц=360°, но подвержен действию усилия в несколько раз меньшего, чем главный вал ИГ. Потери энергии в этом случае существенно снижены. Практически не менее чем в 2 раза. Для того чтобы исключить третий недостаток, характерный как для аналога, так и прототипа, необходимо выполнить следующие условия.
Первое. Радиус кривошипа главного вала ИГ выполнить несколько больше, чем в известных КПМ. При этом радиус кривошипа главного вала ИГ l3 следует принять существенно большим по величине, чем радиус кривошипа l1 приводного кривошипного вала ПГ. И в то же время l3 должен быть меньше длины рычага l2, связывающего указанные валы.
Второе. Оси качания кривошипной (эксцентриковой) шейки главного вала и опорных его шеек, а также ось вращения малой головки шатуна структурной группы ПГ целесообразно выполнить по одну сторону от траектории движения инструмента. В частном случае на одной прямой. Тогда звенья ПГ будут нагружены наименьшим усилием и моментом.
Техническим результатом настоящего изобретения является создание кривошипно-кулисного клинового механизма, в котором исключено заклинивание кулисы.
Указанный технический результат достигается тем, что в предложенном кривошипно-кулисном клиновом механизме, содержащем ведущее звено в виде кривошипного вала и структурные группы, - приводную и исполнительную, исполнительная группа выполнена в виде кулисного камня с кулисой, которая несет на себе подвижную часть инструмента, а приводная - в виде шатуна, шарнирно связанного с ведущим звеном и рычагом, жестко соединенным с эксцентриковым валом исполнительной структурной группы, причем величина эксцентриситета эксцентриковой шейки эксцентрикового вала исполнительной структурной группы выполнена превышающей величину эксцентриситета кривошипа приводного кривошипного вала и меньше длины рычага, шарнирно связанного через шатун с ведущим звеном приводной структурной группы и эксцентриковым валом исполнительной структурной группы. Ось эксцентриковой шейки эксцентрикового вала и ось малой головки шатуна могут быть выполнены на одной прямой с осью вращения опорных шеек эксцентрикового вала.
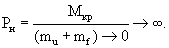
На фиг.1 - схема четырехбойковой радиально-обжимной (ковочной) машины с использованием предлагаемого изобретения.
На фиг.2 - схема исполнения главного кривошипного (эксцентрикового) вала согласно предлагаемого изобретения.
Машина устроена следующим образом. Содержит две структурные группы звеньев, образующих механизм: группу привода - ПГ и главную группу - группу исполнительных звеньев - ИГ.
В ПГ входят приводное или ведущее звено 1, выполненное в виде кривошипного вала. Звено жестко соединено с зубчатым колесом 1.2 (фиг.1). Колесо 1.2 кинематически связано с электроприводом (на фиг.1, 2 - не показаны). Ведущее звено 1 шарнирно связано посредством шатуна 2 с рычагом l2, жестко соединенным с кривошипным валом 3 ИГ. Вал 3 ИГ посредством кулисного камня 4.2 (фиг.1) шарнирно соединен с кулисой 5.2. Кулиса 5.2 несет на себе подвижную часть инструмента.
Главный кривошипный вал 3 ИГ выполнен в виде эксцентрикового вала с опорными шейками радиуса Rc и осью вращения в точке С (фиг.2). Кривошипная (эксцентриковая) шейка радиуса Rд имеет центр вращения в точке Д, удаленной от точки С на величину эксцентриситета l3. С валом 3 посредством рычага l3 шарнирно соединен шатун 2 с осью вращения малой головки шатуна в точке В. При этом необходимо выдержать следующие условия:
1. Оси вращения в точках С-Д-В должны лежать на одной прямой.
2. Рычаг l2 по длине должен быть больше величины l3 эксцентриситета кривошипной шейки вала 3, а эксцентриситет l1 приводного вала 1 должен быть меньше l3. Т.е. должно быть обеспечено соотношение l2>l3>l1.
3. Прямая ВС не должна при работе пересекать траекторию движения а-а подвижной части инструмента, т.е. кулисы 5.2 по фиг.2. Таким образом, прямая ВС может располагаться в диапазоне угла, равного 180°, в зависимости от величины деформирующего хода h (угол ϕр), потребного для получения изделия согласно назначению машины.
В этом случае идеальное плечо mu не будет равно нулю, т.е. mu ≠ 0.
4. При этом изменяется характер воздействия инструмента на обрабатываемое изделие. Он близок к воздействию клина цилиндрической формы на заготовку. В этом случае для получения усилия Рн штамповки требуется меньший крутящий момент на приводном валу.
Машина работает следующим образом. При включении электродвигателя вращение передается на зубчатое колесо (фиг. 1, 2). Далее вращение сообщается приводному кривошипному валу 1. Посредством шатуна 2 движение сообщается валу 3. Вал 3 поворачивается на некоторый угол, равный ϕр, и посредством кулисного камня 4.2 перемещает кулису 5.1, которая воздействует закрепленным на ней инструментом на предварительно введенную между бойками заготовку. Происходит формирование обрабатываемой заготовки. После этого вал 3 поворачивается в обратную сторону и поднимает кулису 5.2 вверх в исходное положение. Приводной вал 1, а с ним и остальные звенья занимают исходное положение и готовы совершить очередной рабочий ход. Бойки воздействуют на предварительно введенную между ними заготовку, обжимая ее. При этом заготовка манипулятором постепенно продвигается между бойками на всю обрабатываемую длину.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| Радиально-ковочная машина | 1982 |
|
SU1397141A1 |
| Радиально-ковочная машина | 1981 |
|
SU1030082A1 |
| ПРОТЯЖНАЯ РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 1992 |
|
RU2136429C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ ДЛИНЫ ХОДА ВЫХОДНОГО ЗВЕНА | 1992 |
|
RU2067234C1 |
| Радиально-ковочная машина | 1991 |
|
SU1796333A1 |
| Замкнутая передача | 1990 |
|
SU1763771A1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ КРИВОШИПА ПЕРЕМЕННОЙ ДЛИНЫ | 1997 |
|
RU2124158C1 |

Изобретение относится к области машиностроения, а именно к исполнительным механизмам технологических машин, например кузнечно-прессовых машин. Кривошипно-кулисный клиновой механизм технологических машин содержит ведущее звено в виде кривошипного вала и структурные группы - приводную и исполнительную. Исполнительная группа выполнена в виде кулисного камня с кулисой, которая несет на себе подвижную часть инструмента. Приводная группа выполнена в виде шатуна, шарнирно связанного с ведущим звеном и рычагом, жестко соединенным с эксцентриковым валом исполнительной структурной группы. Величина эксцентриситета эксцентриковой шейки эксцентрикового вала исполнительной структурной группы выполнена превышающей величину эксцентриситета кривошипа приводного кривошипного вала и меньше длины рычага. Рычаг шарнирно связан через шатун с ведущим звеном приводной структурной группы и эксцентриковым валом исполнительной структурной группы. Ось эксцентриковой шейки эксцентрикового вала и ось малой головки шатуна расположены на одной прямой с осью вращения опорных шеек эксцентрикового вала. В результате обеспечивается исключение заклинивания кулисы. 1 з.п. ф-лы, 2 ил.
| ПРЕСС КРИВОШИПНЫЙ | 1975 |
|
RU541678C |
| Исполнительный механизм пресса двойного действия с шестернеэксцентриковым приводом | 1975 |
|
SU533501A1 |
| Исполнительный механизм пресса | 1981 |
|
SU958135A1 |
| ПРОТЯЖНАЯ РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 1992 |
|
RU2136429C1 |
| GB 1394970, 21.01.1975. | |||

