Изобретение относится к области машиностроения и может быть использовано в различных отраслях промышленности, в том числе в машиностроении, нефтехимической и нефтеперерабатывающей промышленности, дозирующей технике для жидких и сыпучих продуктов и др., в качестве кривошипно-ползунных механизмов (КПМ) приводов возвратно-поступательного движения с регулированием величины хода ползуна при работающем и остановленном основном приводе.
Известен КПМ с изменяемой длиной хода ползуна при работающем и остановленном основном приводе, содержащий корпус с соосными неподвижной и подвижной в осевом направлении опорами, размещенные в корпусе основной привод, состоящий из ведущего вала-шестерни и установленного в неподвижной опоре ведомого колеса, привод подвижной опоры, ползун, связанный с ним одним концом шатун, на другом конце которого выполнена кривошипная головка с отверстием, втулку, размещенную в последнем, и установленный в подвижной опоре с возможностью вращения и осевого перемещения кривошипный вал.
Изменение длины хода ползуна осуществляется при помощи кривошипного вала с косым шипом и посаженной на шип втулкой, соединенной с кривошипной головкой шатуна (Промышленный каталог "Дозировочные насосы. Системы измерения и регулирования", фирма НАУКЕ FY, Австрия, 1989 г.).
Одним из особенностей этого механизма является сборка по трехопорной схеме, что приводит к усложнению конструкции корпуса и не позволяет проводить преемственность и широкую унификацию основных деталей ранее выпускаемого оборудования.
Техническим результатом изобретения является возможность двухопорной сборки механизма с сохранением основных деталей ранее выпускаемых изделий.
Этот результат достигается тем, что в КПМ, содержащем корпус с соосными неподвижной и подвижной в осевом направлении опорами, размещенный в корпусе основной привод, состоящий из ведущего вала-шестерни и ведомого колеса, привод подвижной опоры, ползун, связанный с ним одним концом шатун, на другом конце которого выполнена кривошипная головка с отверстием, втулку, размещенную в последнем, и установленный в подвижной опоре с возможностью вращения и осевого перемещения кривошипный вал, второй конец кривошипного вала опирается на неподвижную опору, на которую установлено и ведомое колесо, передающее крутящий момент кривошипному валу.
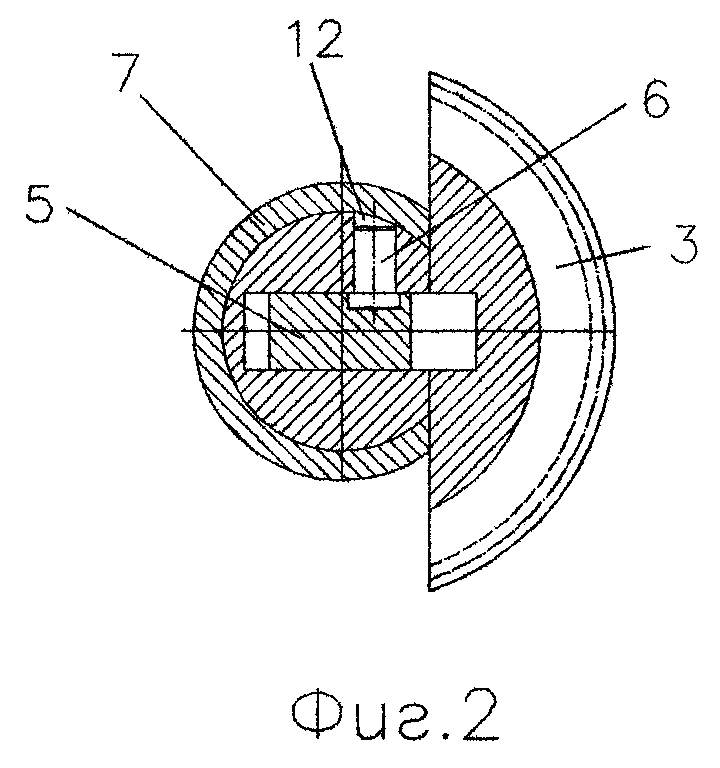
На фиг. 1 представлен общий вид механизма, на фиг.2-сечение механизма плоскостью А-А.
Механизм состоит из корпуса 1, ведущего вала-шестерни 2, ведомого колеса 3, втулки 4, кривошипного вала 5, шпонки 6, шатуна 7, ползуна 8, неподвижной опоры 9, подвижной опоры 10 и привода неподвижной опоры 11.
Опоры 9 и 10 установлены соосно. Опора 10 с помощью привода 11 может перемещаться в направлении оси. Колесо 3 опирается на опору 9 и имеет профильный паз, в который входит шип кривошипного вала.
Втулка, входящая в кривошипную головку шатуна, имеет сквозное профильное отверстие (фиг. 2), сквозь которое проходит шип кривошипного вала, и радиальное отверстие для шпонки 12, скользящей по пазу 13 кривошипного вала. Втулка ограничена от перемещения в направлении оси и может вращаться в плоскости движения шатуна.
Кривошипный вал 5 имеет соосные концы, один из которых опирается на подвижную опору, а другой - на опору качения (или скольжения). Между концами вала заключено тело-шип кривошипного вала, профиль которого входит в соответствующие отверстия ведомого колеса и втулки (фиг. 2), входящей в кривошипную головку шатуна.
КПМ работает следующим образом:
Вращение от вала-шестерни 2 передается колесу 3, кривошипному валу 5 и связанной с его шипом втулке 4, приводящей в движение шатун 7 и ползун 8.
При перемещении подвижной опоры и связанного с ней кривошипного вала в направлении оси шпонка 6 скользит по наклонному пазу шипа, изменяя величину эксцентриситета оси втулки относительно оси вращения кривошипного вала.
При работе КПМ вращательное движение основного привода с помощью кривошипно- шатунного механизма преобразуется в возвратно-поступательное движение ползуна в пределах удвоенного суммарного эксцентриситета шипа кривошипного вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМОЙ ДЛИНОЙ ХОДА ПОЛЗУНА ПРИ РАБОТАЮЩЕМ И ОСТАНОВЛЕННОМ ОСНОВНОМ ПРИВОДЕ | 1995 |
|
RU2098700C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМОЙ ДЛИНОЙ ХОДА ПОЛЗУНА | 1995 |
|
RU2087780C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМОЙ ДЛИНОЙ ХОДА ПОЛЗУНА БЕЗ ОСТАНОВКИ МЕХАНИЗМА | 1992 |
|
RU2114349C1 |
| ЭЛЕКТРОНАСОСНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 2003 |
|
RU2227846C1 |
| НАСОС ДОЗИРОВОЧНЫЙ БЕСКЛАПАННЫЙ ПЛУНЖЕРНЫЙ ОППОЗИТНЫЙ ДЛЯ ПЕРЕКАЧИВАНИЯ ЖИДКОСТЕЙ | 1999 |
|
RU2160851C1 |
| НАСОС ДОЗИРОВОЧНЫЙ МЕМБРАННЫЙ ГИДРОПРИВОДНОЙ | 1999 |
|
RU2171398C1 |
| НАСОС ДОЗИРОВОЧНЫЙ ПЛУНЖЕРНЫЙ С ШИБЕРНЫМ ЗАТВОРОМ ДЛЯ ПЕРЕКАЧИВАНИЯ ЖИДКОСТЕЙ | 2000 |
|
RU2195578C2 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| Привод подачи фрезерного станка для обработки вафельной конструкции обечайки | 2024 |
|
RU2824782C1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
Изобретение может быть использовано в различных отраслях промышленности в качестве кривошипно-ползунных механизмов приводов возвратно-поступательного движения. Механизм содержит корпус с соосными неподвижной и подвижной в осевом направлении опорами. В корпусе размещен основной привод, состоящий из ведущего вала-шестерни и ведомого колеса. Ползун связан с ним одним концом шатуна, на другом конце которого выполнена кривошипная головка с отверстием, в котором размещена втулка. В подвижной опоре с возможностью вращения и осевого перемещения установлен кривошипный вал. Второй конец кривошипного вала опирается на неподвижную опору, на которую установлено и ведомое колесо, передающее крутящий момент кривошипному валу. Шип кривошипного вала входит в профильное отверстие ведомого колеса. Предложенный механизм может быть собран по двухопорной схеме, при этом могут использоваться детали ранее выпускаемых изделий. 2 ил.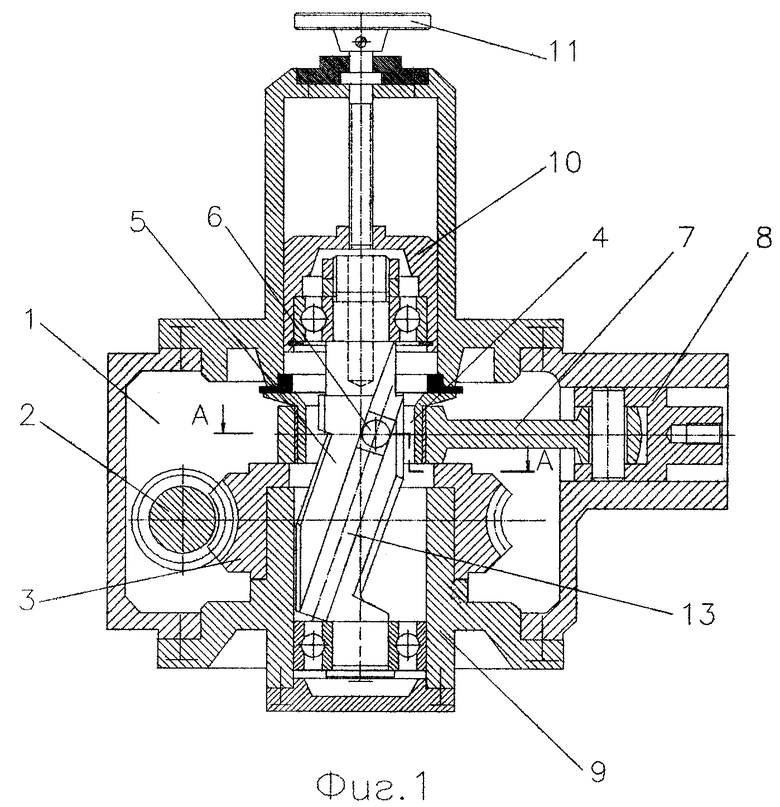
Кривошипно-ползунный механизм с изменяемой длиной хода ползуна при работающем и остановленном основном приводе, содержащий корпус со встроенным приводом, состоящим из вала-шестерни и ведомого колеса, расположенные в корпусе соосные неподвижную и подвижную в осевом направлении опоры, механизм перемещения последней, кривошипный вал с косым шипом, установленный одним концом в подвижной опоре с возможностью вращения и осевого перемещения и размещенный в ступице передающего ему крутящий момент ведомого колеса и во втулке, входящей в отверстие кривошипной головки шатуна, шпонку, соединяющую втулку и кривошипный вал, шатун и связанный с ним ползун, отличающийся тем, что ведомое колесо установлено на неподвижной опоре корпуса с возможностью вращения и выполнено с профильным отверстием для соединения его с кривошипным валом, а конец кривошипного вала, противоположный концу, установленному в подвижной опоре, размещен в отверстии неподвижной опоры с возможностью вращения вокруг оси, общей для ведомого колеса, оси вращения кривошипного вала, неподвижной и подвижной опор.
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМОЙ ДЛИНОЙ ХОДА ПОЛЗУНА ПРИ РАБОТАЮЩЕМ И ОСТАНОВЛЕННОМ ОСНОВНОМ ПРИВОДЕ | 1995 |
|
RU2098700C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМОЙ ДЛИНОЙ ХОДА ПОЛЗУНА | 1995 |
|
RU2087780C1 |
| Механизм возвратно-поступательного движения с регулируемым ходом | 1987 |
|
SU1555571A1 |
| БЫСТРОРЕЖУЩАЯ СТАЛЬ | 2006 |
|
RU2307198C1 |
| Процессор с микропрограммным управлением | 1983 |
|
SU1149273A1 |

