Предлагаемое изобретение относится к области разработки систем телеуправляемых вращающихся ракет и может быть использовано в комплексах танкового и противотанкового вооружения и малогабаритных зенитных управляемых ракет (ЗУР).
Известны устройства для управления вращающимися по углу крена ракетами, основанные на выделении координат, осуществляемом аппаратурой выделения координат (АВК), их модуляции с помощью опорных сигналов (например, с выходов гироскопических раскладчиков команд (ГРК)), несущих информацию об угле крена ракеты, и преобразовании модулированных сигналов управления в соответствующие отклонения рулей (см., например, В.А.Павлов и другие "Стабилизация летательных аппаратов и автопилоты". М.: Высшая школа, 1964 г., стр.209).
Общим недостатком известных систем является то, что они не позволяют изменять динамические характеристики аппаратуры управления ракетой до и после запуска ракеты без изменения структуры аппаратуры управления.
Необходимость изменения динамических характеристик аппаратуры управления ракетой до и после пуска ракеты обусловлена тем, что при подготовке к пуску, когда происходит выход бортовой батареи и электронной аппаратуры на режим (раскрутка ротора ГРК и т.д.), сигналы с выхода АВК имеют, как правило, шумовой характер, что приводит, особенно в случае присутствия в аппаратуре управления накопительных элементов, к случайным отклонениям ракеты от расчетной траектории при сходе ее с пусковой установки (ПУ) носителя.
С помощью изменения структуры аппаратуры управления ракетой в момент схода можно обеспечить постоянство параметров элементов аппаратуры управления и их соответствие расчетным значениям.
Однако изменение структуры аппаратуры управления в момент пуска ракеты с помощью связи с пусковой установкой приводит к ухудшению надежности комплекса в целом.
Известно устройство для управления вращающейся ракетой, содержащее последовательно соединенные с АВК модулятор, опорный вход которого соединен с выходом блока опорных сигналов, и рулевой привод (см., например, Кузовков Н.Т. Система стабилизации летательных аппаратов. М.: Высшая школа, 1976 г., стр.238).
АВК вырабатывает сигналы управления, пропорциональные отклонениям ракеты от линии визирования в декартовой системе координат. Сигналы управления с выхода АВК преобразуются с помощью модулятора во вращающуюся, связанную с ракетой, систему координат и далее с помощью рулевого привода - в линейное отклонение рулей.
Недостатком известного устройства является то, что оно не позволяет повысить точность наведения ракеты без изменения структуры аппаратуры управления до и после пуска ракеты. Из литературы (см., например, А.А.Лебедев и В.А.Карабанов "Динамика систем управления беспилотными летательными, аппаратами". М.: Машиностроение, 1965 г., стр.843). Известно, что при действии на ракету низкочастотных возмущений типа ускорения свободного падения или ускорения, связанного с вращением линии визирования, в контуре управления ракетой устанавливается динамическая ошибка, величина которой прямо пропорциональна ускорению и обратно пропорциональна коэффициенту разомкнутого контура управления, что ухудшает точность наведения ракеты, особенно при изменении динамических характеристик ракеты в процессе полета. Известно (см., например, "Системы управления ПТУРС и перспективы их развития", под редакцией С.П.Непобедимого, М.: Машиностроение, 1978 г., стр.164...168), что для повышения точности наведения ракеты в условиях действия возмущений типа ускорений необходимо в аппаратуре управления ракетой производить интегрирование сигналов управления, которое осуществляется до тех пор, пока координаты ракеты не станут равны нулю.
Однако наличие интегрирующего звена в составе известного устройства не приводит к повышению точности наведения вследствие того, что при подготовке ракеты к пуску происходит интегрирование случайных шумовых сигналов АВК, которое при сходе ракеты с ПУ приводит к случайным отклонениям от расчетной траектории вплоть до врезания в землю или выхода из поля управления. Все это приводит к необходимости изменения структуры аппаратуры управления в момент пуска ракеты так, чтобы обеспечить отсутствие интегрирующих свойств аппаратуры управления в процессе подготовки к пуску и введение интегрирующих свойств в полете ракеты.
Изменение структуры аппаратуры управления в момент пуска усложняет конструкцию пусковой установки аппаратуры управления ракетой и снижает надежность функционирования комплекса в целом.
В силу указанных причин введение интегрирующих звеньев в устройство для управления вращающейся ракетой на практике широко не применяется.
Целью данного изобретения является повышение точности наведения ракеты без изменения структуры аппаратуры управления ракетой в процессе подготовки и проведения пуска.
Поставленная цель достигается тем, что в устройство для управления вращающейся ракетой, содержащее АВК, модулятор, блок опорных импульсов и рулевой привод, вводился сумматор, демодулятор, сглаживающий фильтр и изменяются связи между упомянутыми блоками известного устройства и вновь введенными, причем выход АВК соединен со вторым входом сумматора, выход сумматора с последовательно соединенными модулятором, опорный вход которого соединены с выходом блока опорных сигналов, и рулевым приводом, выход модулятора с последовательно соединенными демодулятором, опорный вход которого соединен с выходом блока опорным сигналов, и сглаживающим фильтром, а выход сглаживающего фильтра - с первым входом сумматора.
Введение новых элементов и связей обеспечивает автоматическое изменение динамических характеристик устройства управления вращающейся ракетой соответственно изменению угловой скорости вращения ракеты по крену до и после пуска.
На чертеже представлена структурная схема предлагаемого устройства управления вращающейся ракетой по одному из каналов (второй канал управления аналогичен первому).
Устройство управления вращающейся ракетой содержит: АВК 1, сумматор 2, модулятор 3, блок опорных сигналов 4, демодулятор 5, сглаживающий фильтр 6, рулевой привод 7.
Работает устройство следующим образом.
Перед пуском ракеты при нахождении ее на пусковой установке подается команда на поджиг электровоспламенителя бортовой батареи. При этом батарея, электронная аппаратура и ротор ГРК ракеты выходят на режим.
Поскольку входной сигнал ABK1 при нахождении ракеты на пусковой установке отсутствует, выходной сигнал АВК представляет собой случайный шумовой процесс (собственные шумы АВК). Этот сигнал поступает на второй вход сумматора 2, а с выхода сумматора - на сигнальный вход модулятора 3, выполненный по схеме коммутатора с переменной знака выходного напряжения (см. У.Титце, К.Шенк. Полупроводниковая схемотехника, 1983 г., стр.282), в котором происходит его модулирование опорным сигналом с выхода блока опорных сигналов 4 по зависимости
И3=И2 И4,
где И3 - выходной сигнал модулятора,
И2 - выходной сигнал сумматора,
И4 - выходной сигнал с блока опорных сигналов.
Так как ракета до пуска не вращается, выходной сигнал блока опорных сигналов - постоянный и соответствует углу крена находящейся на пусковой установке ракеты (в частности, нулевой при нулевом угле крена ракеты).
Выходной сигнал модулятора поступает на демодулятор 5, выполненный также по схеме коммутатора с переменной знака выходного напряжения, выходной сигнал которого определяется по зависимости
И5=И3·И4
и также равен нулю, а следовательно, контур обратной связи, образованный сумматором, модулятором, демодулятором и сглаживающим фильтром 6 разомкнут и устройство в целом имеет нулевой коэффициент передачи.
При пуске происходит раскручивание ракеты по углу крена и сигналы на выходе блока опорных сигналов приобретают синусоидальный характер
И4=sin[γ+γ(0)],
где γ - текущий угол крена,
γ(0) - начальный угол крена.
Сигнал на выходе модулятора можно представить в виде
И3=И2·sin[γ+γ(0)],
а на выходе демодулятора

Учитывая, что составляющая  при прохождении через сглаживающий фильтр 6 фильтруется, выходной сигнал сглаживающего фильтра можно представить в виде
при прохождении через сглаживающий фильтр 6 фильтруется, выходной сигнал сглаживающего фильтра можно представить в виде
 ,
,
где W6(P) - передаточная функция сглаживающего фильтра, например,
 ,
,
где К6 - коэффициент передачи сглаживающего фильтра,
Т6 - постоянная времени сглаживающего фильтра.
Исходя из изложенного и в соответствии с правилом преобразования структурных схем с обратной связью (см., например, "И.Н.Иващенко "Автоматическое регулирование", М.: Машиностроение, 1973 г., стр.208), передаточную функцию устройства управления, связывающую преобразование Лапласа от огибающей выходного сигнала рулевого привода 7 с преобразованием Лапласа входного сигнала АБК1, можно представить в следующем виде
где WУУ(Р) - передаточная функция устройства управления,
W1(P) - передаточная функция АВК,
W6(P} - передаточная функция сглаживающего фильтра,
W7(P) - передаточная функция рулевого привода.
Подставляя в полученное выражение вместо W6(Р) его реализацию
 где К6=2,
где К6=2,
получаем

Наличие в знаменателе передаточной функции устройства управления множителя Р иллюстрирует интегрирующие свойства аппаратуры управления, сравни передаточную функцию интегратора  в полете ракетой.
в полете ракетой.
Предлагаемое устройство управления производит интегрирование сигналов, пропорциональных координатам ракеты, до тех пор, пока координата не обнулится, т.е. не ликвидируется динамическая ошибка от возмущающих поставленной пели повышение точности наведения ракетой.
Таким образом, предложенное устройство управления повышает точность наведения ракетой за счет интегрирования сигналов управления ракетой в полете и предотвращения интегрирования случайные собственных шумов устройства управление при подготовке к пуску без изменения структуры аппаратуры управления.
Предлагаемое устройство управления вращающейся ракетой обладает следующими преимуществами перед известными:
- предотвращает интегрирование собственных шумов при подготовке ракеты к пуску;
- повышает надежность функционирования и упрощает конструкцию комплекса в целом за счет исключения из пускового устройства блоков, изменяющие структуру аппаратуры управления в момент схода ракеты спусковой установки.
Для проверки предлагаемого устройства были изготовлены и проверены при испытании комплекса "Рефлекс" опытные образцы устройства в составе бортовой аппаратуры управления.
Так при пуске ракеты 9M119 с отключенной маршевой двигательной установкой (т.е. в условиях значительного изменения динамических характеристик ракеты) на стартовом и маршевом участках полета получены нулевые отклонения от расчетной траектории и попадание в центр мишени, находящейся на дальности 4000 м, в то время как в контрольных пусках без предлагаемого устройства в аналогичных условиях наблюдались отклонения ракеты от оси к луча до 2 м и урезания в землю на дальности до 3000 м.
Таким образом, проверка предлагаемого устройства показала его высокую эффективность и преимущество перед известным.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
Изобретение относится к области авиационной техники. Устройство включает блок формирования командного сигнала, последовательно соединенные блок выработки опорных напряжений, модулятор и рулевой привод. Введены последовательно соединенные блок перемножения, связанный первым входом с выходом модулятора, а вторым входом - с выходом блока выработки опорных напряжений, апериодический фильтр, и сумматор, включенный вторым входом к выходу блока формирования командного сигнала, а выходом - к входу модулятора. Технический результат - повышение динамической точности. 1 ил.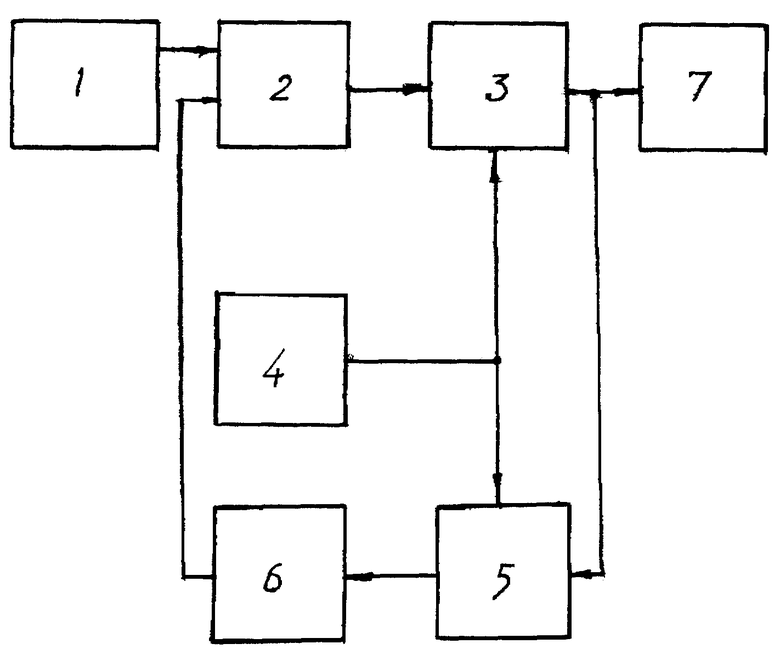
Устройство для управления вращающейся ракетой, включающее блок формирования командного сигнала, последовательно соединенные блок выработки опорных напряжений, модулятор и рулевой привод, отличающееся тем, что, с целью повышения динамической точности, в него введены последовательно соединенные блок перемножения, связанный первым входом с выходом модулятора, а вторым входом - с выходом блока выработки опорных напряжений, апериодический фильтр и сумматор, подключенный вторым входом к выходу блока формирования командного сигнала, а выходом - к входу модулятора.
| Н.Т.Кузовков "Системы стабилизации ЛА" М.: Высшая школа, 1976, стр.238. |

