Изобретение относится к ракетной технике и предназначено для использования в комплексах вооружения телеуправляемых ракет.
Известен способ испытания ракеты для определения ее располагаемой перегрузки, включающий формирование кусочно-постоянной команды управления ракетой, полет ракеты под воздействием команды управления, измерение на борту ракеты ее линейного ускорения и углового отклонения рулевого органа, передачу измеренных сигналов ускорения ракеты и углового отклонения рулевого органа с борта ракеты на наземный измерительный комплекс с последующим их запоминанием и определение располагаемой перегрузки ракеты путем пропорционального сопоставления развиваемого линейного ускорения с угловым отклонением рулевого органа (/1/, с. 347-350, /2/, с. 267-272).
В этом способе определение располагаемой перегрузки основано на радиотелеметрических измерениях и использовании соотношения
где n - располагаемая перегрузка ракеты;
Jp - измеренное линейное ускорение ракеты;
δmax - максимально допустимый угол отклонения рулевого органа ракеты;
δ - измеренное среднее угловое отклонение рулевого органа;
g - ускорение силы тяжести, g≈9,81 м/с2.
Известному способу испытаний присущи недостатки:
- высокая стоимость и большая сложность проведения испытаний, т.к. требуется изготовление специальных комплектов ракет с бортовыми датчиками (например, акселерометрами для измерения линейного ускорения и индукционными датчиками для измерения угловых отклонений рулей ракеты) и создание радиотелеметрического измерительного комплекса, включающего бортовую и наземные составляющие части;
- низкая точность измерения ускорения центра масс ракеты из-за наличия собственных колебаний ракеты и упругих колебаний места расположения на ракете бортового датчика ускорения, а также присутствия в измеренном сигнале составляющей ускорения от силы тяжести;
- низкая оперативность получения информации о перегрузке ракеты.
Известен способ испытания ракеты для определения располагаемой перегрузки, включающий формирование кусочно-постоянной команды управления ракетой, полет ракеты под воздействием команды управления, измерение на борту ракеты углового отклонения ее рулевого органа, передачу измеренного углового отклонения рулевого органа с борта ракеты на наземный измерительный комплекс с последующим его запоминанием, внешнетраекторное слежение за ракетой, измерение и последующее запоминание координат ракеты, определение обработкой координат ракеты развиваемого нормального ускорения ракеты и определение располагаемой перегрузки ракеты путем пропорционального сопоставления развиваемого нормального ускорения с угловым отклонением рулевого органа ракеты (/2/, с. 267-272, с. 407-416).
Суть известного способа испытания заключается в том, что нормальное ускорение ракеты от воздействия рулевого органа, задаваемого командой управления, не измеряется непосредственно на борту ракеты, а определяется обработкой координат траекторного движения ракеты, полученных внешнетраекторными (оптическими, радиотехническими) измерениями в системе координат измерительного пункта, удаленного от ракеты. Располагаемая перегрузка ракеты при этом определяется в соответствии с соотношением
где Vp - скорость ракеты, определяемая по внешнетраекторным измерениям ее координат; - угол наклона вектора скорости ракеты и скорость его изменения, определяемые по внешнетраекторным измерениям координат.
- угол наклона вектора скорости ракеты и скорость его изменения, определяемые по внешнетраекторным измерениям координат.
Такой способ испытания позволяет упростить ракету за счет исключения датчика ускорения, повысить точность определения перегрузки, но вместе с тем обладает недостатками, которые сводятся к следующим:
- высокая стоимость и большая сложность проведения испытаний, определяемая использованием комплекса внешнетраекторных измерений;
- требуется оснащение ракеты бортовым датчиком угла отклонения ее рулевого органа и использование радиотелеметрического измерительного комплекса, включающего бортовую и наземные составляющие части;
- низкая точность измерения координат ракеты из-за погрешностей синхронизации измерений и привязки измерительных систем координат;
- низкая надежность внешнетраекторного сопровождения и соответственно измерения координат высокоскоростных и маневренных ракет;
- зависимость точности определения перегрузки от метеоусловий (оптические внешнетраекторные измерения) и помех измерения координат (радиотехнические внешнетраекторные измерения);
- низкая оперативность.
Указанные недостатки определяют высокие сложность и стоимость испытаний ракеты, а также снижают точность и оперативность определения ее располагаемой перегрузки.
Известен способ испытания телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, измерение линейного рассогласования между ракетой и опорной траекторией наведения, формирование команды управления ракетой, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения, и наведение ракеты на цель (/3/, с. 327-329).
Такой способ испытания предназначен для оценки точности наведения и проверки боевой эффективности действия ракеты по цели и осуществляется собственными средствами комплекса вооружения (без дополнительной измерительной аппаратуры на борту ракеты и наземном пункте управления), функционирующими, как правило, на базе управляющей цифровой вычислительной машины (ЦВМ), и не предусматривает определение летных динамических характеристик ракеты, в том числе и ее перегрузки. Это определяется не столько отсутствием специальных измерений, а главным образом тем, что при наведении ракеты сигналы управления носят случайный характер, определяемый переменностью опорной траектории и измеряемыми эволюциями движений цели и ракеты, которые наряду с детерминированными составляющими имеют также быстроменяющиеся (высокочастотные) случайные компоненты. Поэтому определение нормального ускорения ракеты по измерениям координат при ее движении по динамической траектории наведения и сопоставление его с переменной и флуктуирующей в процессе наведения командой управления для оценки с приемлемой погрешностью располагаемой перегрузки ракеты не представляется возможным. В то же время расширение операций вычислительного характера и функций системы управления позволяет получить качественную информацию о перегрузке ракеты при штатном измерении ее угловых координат и скорости полета.
Задачей настоящего изобретения является повышение точности и оперативности определения располагаемой перегрузки ракеты, снижение сложности, стоимости и повышение уровня автоматизации процесса испытаний телеуправляемой ракеты.
Поставленная задача достигается тем, что в способе испытания телеуправляемой ракеты, включающем формирование опорной траектории наведения ракеты, измерение линейного рассогласования между угловой координатой ракеты и опорной траекторией наведения, формирование команды управления, пропорциональной линейному рассогласованию между угловой координатой ракеты и опорной траекторией наведения, наведение ракеты и измерение скорости полета ракеты, формируют знакопеременную периодическую команду управления ракетой, в качестве опорной траектории используют неподвижную линию наведения, осуществляют наведение ракеты с учетом знакопеременной периодической команды управления, дискретно запоминают линейное рассогласование между угловой координатой ракеты и опорной траекторией наведения, скорость полета ракеты и команду управления ракетой относительно опорной траектории наведения, определяют нормальное ускорение ракеты относительно опорной траектории наведения, а величину располагаемой перегрузки ракеты определяют как коэффициент линейной регрессии нормального ускорения ракеты по команде управления ракетой.
Введение в способ испытания ракеты новых операций позволяет по сравнению с известными повысить точность и оперативность определения располагаемой перегрузки телеуправляемой ракеты, снизить сложность и стоимость ее испытаний. Суть предлагаемого изобретения заключается в сочетании операций теленаведения ракеты и дополнительных операций по формированию управления ракетой, регистрации и обработки ее фазовых координат, реализуемых штатной системой управления. При этом располагаемая перегрузка определяется по непосредственным измерениям и с учетом реального управления ракетой и динамических характеристик системы, что предопределяет точность, достоверность, оперативность и простоту проведения испытаний. Важно также и то, что для определения располагаемой перегрузки используются высокоточные измерительные и вычислительные средства самого испытуемого комплекса вооружения и не требуется дополнительная измерительная и регистрирующая аппаратура как на борту ракеты, так и на наземном пункте.
Сравнение заявляемого технического решения с известными позволило установить соответствие его критерию "новизна". При изучении других известных технических решений в данной области техники, признаки, отличающие заявляемое изобретение от известных, не были выявлены, и поэтому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
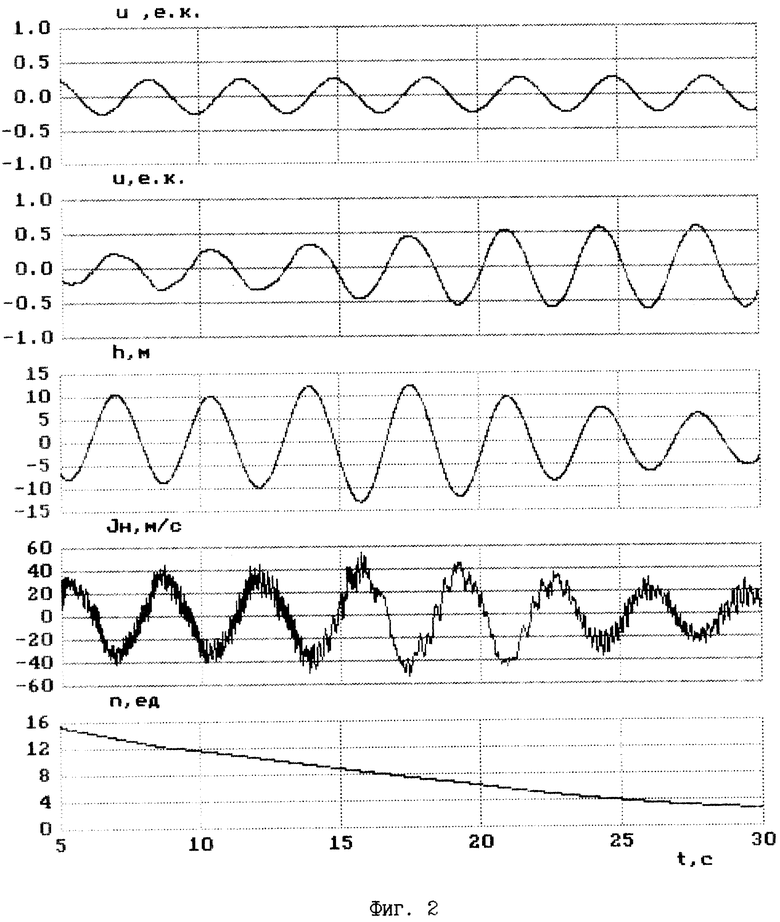
Функциональная схема системы телеуправления, реализующей предлагаемый способ испытания ракеты, приведена на фиг.1, а эпюры, поясняющие процесс определения располагаемой перегрузки ракеты, на фиг.2. На фиг.2 обозначено:
uf - нормированная возмущающая знакопеременная периодическая команда управления;
u - нормированная команда управления ракетой относительно опорной траектории наведения;
h - линейное рассогласование между ракетой и опорной траекторией;
Jp - нормальное ускорение ракеты относительно опорной траектории наведения;
n - располагаемая нормальная перегрузка ракеты.
Нормирование команды управления проводится по отношению к максимально возможной команде, соответствующей максимально допустимому отклонению рулевого органа ракеты, т.е.
u = U/Umax[e.к.]; (3)
где U - команда управления;
Umax = δmax, |u| ≤ 1[e.к.], Umax=[e.к.];
е.к. - единичная команда управления.
Система управления ракетой содержит пеленгатор цели 1, блок формирования команды компенсации веса 2 и контур управления ракетой, включающий в каждом из каналов тангажа и курса последовательно соединенные пеленгатор ракеты 3, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты 4, второй вход которого подключен к выходу пеленгатора цели 1, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения 5, сумматор 6, второй вход которого подключен к выходу блока формирования команды компенсации веса 2, устройство передачи команд управления 7 и ракету 8, а также блок формирования знакопеременной периодической команды управления 9, выход которого соединен с третьим входом сумматора 6, оперативно-запоминающее устройство 10, первый, второй и третий входы которого подключены соответственно к второму выходу пеленгатора ракеты 3, выходу блока формирования линейного рассогласования между ракетой и опорной траекторией 4, выходу сумматора 6, последовательно соединенные блок дифференцирования 11, первый и второй входы которого подключены соответственно к первому и второму выходам оперативно-запоминающего устройства 10, блок сглаживания 12, второй и третий входы которого подключены соответственно к второму и третьему выходам блока дифференцирования 11, блок формирования сигнала нормального ускорения ракеты 13, второй и третий входы которого подключены соответственно к второму и третьему выходам блока сглаживания 12, а четвертый вход - к второму выходу оперативно-запоминающего устройства 10, и блок формирования сигнала располагаемой перегрузки ракеты 14, второй вход которого подключен к третьему выходу оперативно-запоминающего устройства 10.
Составляющие элементы системы управления - пеленгатор цели 1, пеленгатор ракеты 2, устройство передачи команд управления 7 представляют собой известные штатные элементы систем наведения ракет (/3/, с. 366-372).
Элементы - блок формирования команды компенсации веса 2, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты 4, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты 5, сумматор 6 также являются известными устройствами систем наведения телеуправляемых ракет (/3/, с. 371, 394) и могут быть выполнены на счетно-решающих цифровых или аналоговых элементах /4/. В системах управления ракет, построенных на современной элементной базе, функции этих блоков реализует счетно-решающий прибор в виде управляющей ЦВС, входящей в штатный состав комплекса телеуправляемых ракет /5/.
Элементы - оперативно-запоминающее устройство 10, блок дифференцирования 11, блок сглаживания 12, блок формирования сигнала нормального ускорения ракеты 13, блок формирования сигнала располагаемой перегрузки ракеты 14, блок формирования знакопеременной периодической команды 9 реализуются в ЦВМ комплекса или могут быть выполнены, например, на базе цифровых элементов /4/.
Система управления ракеты работает следующим образом (рассматривается работа одного канала наведения, например, в угломестной плоскости). Опорная траектория наведения ракеты в общем случае строится в соответствии с принятым методом наведения по измеренным координатам цели /3/. В предлагаемом способе испытания в качестве опорной траектории используется неподвижная линия наведения, угловая координата которой задается пеленгатором цели 1 (наведение в неподвижную "имитированную точку"), т.е.
ϕo = ϕц = ϕo = const. (4)
После запуска ракеты, пеленгатор ракеты 3 осуществляет ее сопровождение и измерение угловой координаты ϕp и скорости Vр полета ракеты. Измеренная угловая координата ракеты ϕp и координата опорной траектории ϕo поступают соответственно на первый и второй входы блока формирования линейного рассогласования между ракетой и опорной траекторией ракеты 4, где формируется сигнал линейного рассогласования между ракетой и опорной траекторией (/3/, с. 370)
h = Rп•(ϕo-ϕp), (5)
здесь RП - программная временная функция дальности ракеты, который далее поступает на вход блока формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией 5. Команда управления ракетой, формируемая пропорционально линейному рассогласованию между ракетой и опорной траекторией в блоке 5, определяется, например, соотношением (/3/, с. 370):
Uh=Kо•(h+Th), (6)
где h - скорость изменения линейного рассогласования;
Т - коэффициент, определяемый из условия обеспечения устойчивости контура управления ракетой.
Сформированная команда управления ракетой Uh с выхода блока 5 поступает на первый вход сумматора 6, где суммируется с командой компенсации веса ракеты UВ, поступающей на его второй вход с выхода блока 2, и возмущающей знакопеременной периодической командой Uf, поступающей на третий вход сумматора 6 с выхода блока 9
U=Uh+UВ+Uf, (7)
и далее устройством передачи команд управления 7 передается на ракету 8. Ракета 8 под действием суммарной команды управления U осуществляет периодическое знакопеременное движение относительно неподвижной опорной траектории наведения.
Возмущающая знакопеременная периодическая команда формируется в виде ортогональной функции времени, например, функции, изменяющейся по гармоническому закону
Uf = Af•sin(2πfft), (8)
где Af - амплитуда команды;
ff - частота изменения возмущающей команды, Tf=1/ff - период команды;
t - время.
Амплитуда Af возмущающей команды Uf задается такой величины, чтобы суммарная команда управления U не превосходила по абсолютной величине максимально возможную команду управления Umax. Частота ff знакопеременной команды задается таким образом, чтобы ее значение не выходило за полосу пропускания замкнутого контура управления ракетой. Для повышения информативности и точности определения перегрузки амплитуда и частота возмущающей команды должны максимизироваться в пределах отмеченных ограничений.
В процессе наведения ракеты в оперативно-запоминающем устройстве 10 дискретно с периодом То запоминаются скорость ракеты Vp[iTo], линейное рассогласование между ракетой и опорной траекторией наведения h[iTo] и команда управления ракетой U[iTo] , где i - номер запоминания измерений, i=0,1,2,..., которые поступают соответственно с второго выхода пеленгатора ракеты 3, с выхода блока формирования линейного рассогласования между ракетой и опорной траекторией 4 и с выхода сумматора 6. Период дискретизации Тo должен соответствовать периоду формирования команд в системе наведения при дискретном управлении ракетой или определяться исходя из общеизвестных требований при дискретизации непрерывных процессов управления ракетой. Сигнал линейного рассогласования h[iTo] с первого выхода оперативно-запоминающего устройства 10 поступает на первый вход блока дифференцирования 11, где определяются первая  и вторая
и вторая  производные (скорость и ускорение) линейного отклонения h[iTo]. Здесь же по сигналу скорости ракеты Vp[iT], поступающему на второй вход блока 11 со второго выхода оперативно-запоминающего устройства 10, определяется первая производная скорости ракеты (продольное ускорение)
производные (скорость и ускорение) линейного отклонения h[iTo]. Здесь же по сигналу скорости ракеты Vp[iT], поступающему на второй вход блока 11 со второго выхода оперативно-запоминающего устройства 10, определяется первая производная скорости ракеты (продольное ускорение)  Алгоритм дифференцирования представляет собой, например, алгоритм скользящего дифференцирования (/6/, с. 253-265), при котором производные вычисляются для средней точки выбранного интервала {(s-j)To, (s+j)To}, где s - опорная точка, являющаяся серединой интервала обработки длиной (2j+l)To, j - количество отсчетов на интервале. Для снижения влияния случайных ошибок измерения на точность определения производных используется многократное определение производных
Алгоритм дифференцирования представляет собой, например, алгоритм скользящего дифференцирования (/6/, с. 253-265), при котором производные вычисляются для средней точки выбранного интервала {(s-j)To, (s+j)To}, где s - опорная точка, являющаяся серединой интервала обработки длиной (2j+l)To, j - количество отсчетов на интервале. Для снижения влияния случайных ошибок измерения на точность определения производных используется многократное определение производных 

 при j=1,2,...,q, по которым находится их среднее значение с учетом весов отдельных вычислений:
при j=1,2,...,q, по которым находится их среднее значение с учетом весов отдельных вычислений:
где 

Далее сигналы скорости  и ускорения
и ускорения  поперечного ускорения ракеты и ее продольного ускорения
поперечного ускорения ракеты и ее продольного ускорения  соответственно с первого, второго и третьего выходов блока дифференцирования 11 поступают соответственно на первый, второй и третий входы блока сглаживания 12, где производится их сглаживание, например, методом скользящего осреднения в средней точке выбранного интервала длиной (2р+1)Тo, где р - количество отсчетов на интервале /6/:
соответственно с первого, второго и третьего выходов блока дифференцирования 11 поступают соответственно на первый, второй и третий входы блока сглаживания 12, где производится их сглаживание, например, методом скользящего осреднения в средней точке выбранного интервала длиной (2р+1)Тo, где р - количество отсчетов на интервале /6/:


Затем сглаженные скорость  ускорение
ускорение  линейного отклонения и продольное ускорение
линейного отклонения и продольное ускорение  ракеты с соответствующих выходов блока сглаживания 12 поступают соответственно на первый, второй и третий входы блока формирования сигнала нормального ускорения 13, на четвертый вход которого поступает с второго выхода оперативно-запоминающего устройства 10 скорость ракеты Vp[sTo], где определяется нормальное ускорение ракеты при возмущенном движении относительно опорной траектории под воздействием команды управления U. Нормальное ускорение JH[sTo] определяется соотношением (/3/, с. 353):
ракеты с соответствующих выходов блока сглаживания 12 поступают соответственно на первый, второй и третий входы блока формирования сигнала нормального ускорения 13, на четвертый вход которого поступает с второго выхода оперативно-запоминающего устройства 10 скорость ракеты Vp[sTo], где определяется нормальное ускорение ракеты при возмущенном движении относительно опорной траектории под воздействием команды управления U. Нормальное ускорение JH[sTo] определяется соотношением (/3/, с. 353):
Сформированный сигнал нормального ускорения JH[sTo] с выхода блока 13 поступает на первый вход блока формирования сигнала располагаемой перегрузки 14, на второй вход которого поступает с третьего выхода оперативно-запоминающего устройства 10 команда управления ракетой U[sT0], где следующим образом определяется располагаемая перегрузка ракеты.
Для ракеты известна функциональная зависимость между ее нормальной перегрузкой nH и командой управления U, под действием которой она развивается
nH=f(U). (12)
Зависимость (12) имеет в среднем линейный характер (/1/, с. 532) и поэтому для последовательности измерений можно записать уравнение линейной регрессии (/6/, с.24-26) для нормальной перегрузки nH по команде управления U:
nH[iT0]=(a + b•U[iT0])/q, (13)
где а, b - коэффициенты линейной регрессии, выражающиеся непосредственно через результаты измерений команды управления U[iTo] и нормального ускорения JH[iTo];
nH=Jн/g.
Коэффициенты а и b линейной регрессии (13) определяются известными соотношениями (/6/, с. 26). Переходя к нормированной команде управления u[iTo] и выбирая скользящий интервал обработки длиной Тоб=(2m+1)Тo равным периоду Tf возмущающей знакопеременной периодической команды управления Uf, запишем для скользящей средней точки i выбранного интервала {(i-k)To, (i+k)To}, где k=1,...,m, выражения для определения коэффициентов регрессии:
так как в силу знакопеременности периодической команды управления U и развиваемого ускорения ракеты Jн на периоде обработки Тоб и их временного осреднения выполняются равенства
С учетом (14) уравнение (13) для определения нормальной перегрузки ракеты запишется в виде
Так как под располагаемой перегрузкой понимается нормальная перегрузка, развиваемая ракетой при максимальном отклонении рулевого органа управления, т. е. при максимально возможной команде управления Um=1, то значение располагаемой перегрузки n будет определяться как коэффициент линейной регрессии нормального ускорения ракеты по команде управления ракетой:
Таким образом обеспечивается испытание телеуправляемой ракеты и определение ее основной динамической характеристики - располагаемой перегрузки за счет использования высокоточных измерительных и вычислительных средств самого испытуемого комплекса вооружения и без привлечения дополнительной измерительной и регистрирующей аппаратуры. Погрешность определения перегрузки может быть оценена по методике, изложенной в /6/ с учетом ошибок измерения в конкретной системе управления ракетой. Оценка перегрузки зенитной ракеты с привлечением моделирования на ЦВМ показала, что погрешность определения располагаемой перегрузки не превышает 3-5%.
Итак, предлагаемый способ испытания телеуправляемой ракеты позволяет повысить точность, достоверность и оперативность определения располагаемой перегрузки ракеты и снизить сложность и стоимость ее испытаний, что выгодно отличает его от известных.
Источники информации
1. А. А. Лебедев, Л.С. Чернобровкин. Динамика полета. - М.: Машиностроение, 1973.
2. А.А. Дмитриевский, В.П. Казаковцев. Движение ракет. - М.: Воениздат, 1968.
3. А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
4. С.В. Якубовский и др. Аналоговые и цифровые интегральные микросхемы. - М.: Радио и связь, 1985.
5. А. Шипунов и др. "Тунгуска" становится эффективнее // Военный парад. 1999. - Вып. 3(33).
6. Б.Ф. Жданюк. Основы статистической обработки траекторных измерений. - М.: Сов. радио, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
Изобретение относится к ракетной технике и может использоваться в комплексах вооружения телеуправляемых ракет. Технический результат - снижение сложности, стоимости и повышение уровня автоматизации процесса испытаний. При наведении ракеты формируют знакопеременную периодическую команду управления ракетой, в качестве опорной траектории наведения ракеты используют неподвижную линию наведения. Осуществляют наведение ракеты с учетом знакопеременной периодической команды управления. Дискретно запоминают линейное рассогласование между ракетой и опорной траекторией наведения, скорость полета ракеты и команду управления ракетой относительно опорной траектории наведения. Определяют нормальное ускорение ракеты относительно опорной траектории наведения, а величину располагаемой перегрузки ракеты определяют как коэффициент линейной регрессии нормального ускорения ракеты по команде управления ракетой. 2 ил.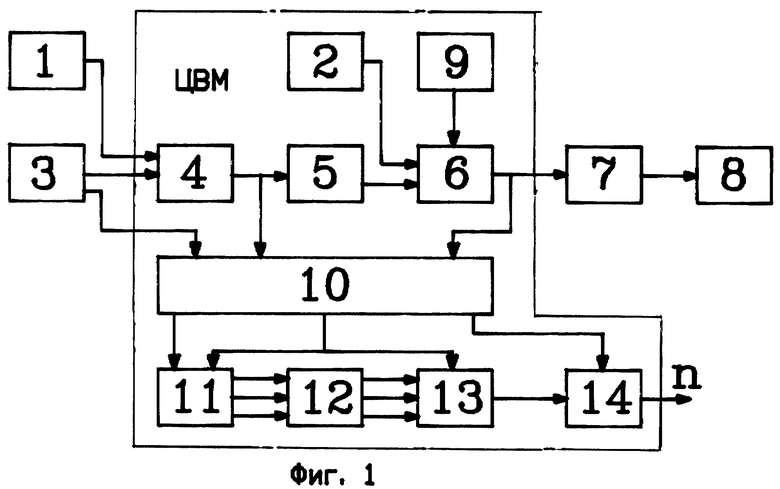
Способ испытания телеуправляемой ракеты, включающий формирование опорной траектории наведения ракеты, измерение линейного рассогласования между угловой координатой ракеты и опорной траекторией наведения, формирование команды управления, пропорциональной линейному рассогласованию между угловой координатой ракеты и опорной траекторией наведения, наведение ракеты и измерение скорости полета ракеты, отличающийся тем, что формируют знакопеременную периодическую команду управления ракетой, в качестве опорной траектории используют неподвижную линию наведения, осуществляют наведение ракеты с использованием знакопеременной периодической команды управления, дискретно запоминают линейное рассогласование между угловой координатой ракеты и опорной траекторией наведения, скорость полета ракеты и команду управления ракетой относительно опорной траектории наведения, определяют нормальное ускорение ракеты относительно опорной траектории наведения, а величину располагаемой перегрузки ракеты определяют как коэффициент линейной регрессии нормального ускорения ракеты по команде управления ракетой.
| ЛЕБЕДЕВ А.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| -М.: Машиностроение, 1965, с.327-330 | |||
| US 5042742, 27.08.1991 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА МОРСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2686678C1 |
| Экономайзер | 0 |
|
SU94A1 |

