Изобретение относится к области вооружения, в частности к управляемым артиллерийским снарядам с самонаведением. Указанное изобретение может быть использовано для противотанковых и зенитных ракет, а также для управляемых мин.
Широкое распространение для управляемых снарядов с самонаведением получил способ пропорциональной навигации.
В соответствии с этим способом на борту снаряда производят измерение угловой скорости вращения  линии "снаряд-цель", формируют сигнал управления
линии "снаряд-цель", формируют сигнал управления  и пропорционально этому сигналу изменяют угловую скорость вращения вектора скорости
и пропорционально этому сигналу изменяют угловую скорость вращения вектора скорости  снаряда для уменьшения величины промаха относительно цели.
снаряда для уменьшения величины промаха относительно цели.
Как правило, измерение угловой скорости вращения линии "снаряд-цель" осуществляют с помощью головки самонаведения, измеряющей угловую скорость вращения линии "снаряд-цель" с запаздыванием Tг, присущим ей как динамическому звену. Поэтому сигнал управления снарядом реально формируют по зависимости [1]:
Возникновение в процессе наведения колебаний снаряда по углам атаки и скольжения, обусловленных отработкой управляющего сигнала, порывами ветра, аэродинамической несимметрией планера, релейностью управления и т.д., приводит к падению скорости снаряда, уменьшению перегрузки снаряда, необходимой для выбора промаха, и, следовательно, к ухудшению точности наведения снаряда на цель.
Задачей данного изобретения является повышение точности наведения управляемого снаряда за счет демпфирования колебаний, которое достигается введением в сигнал управления, пропорциональный угловой скорости вращения линии "снаряд-цель", дополнительной составляющей, следующей на частоте собственных колебаний снаряда и демпфирующей эти колебания.
Решение данной задачи достигается тем, что в способе, включающем измерение с помощью гироскопической головки самонаведения угловой скорости вращения  линии "снаряд-цель" и изменение угловой скорости вращения вектора скорости снаряда в соответствии с сигналом управления (u), ротор головки самонаведения вращают в направлении, противоположном вращению снаряда по крену, за счет чего сигнал управления формируют по зависимости
линии "снаряд-цель" и изменение угловой скорости вращения вектора скорости снаряда в соответствии с сигналом управления (u), ротор головки самонаведения вращают в направлении, противоположном вращению снаряда по крену, за счет чего сигнал управления формируют по зависимости 
где k1, k2 - коэффициенты пропорциональности, Tг - постоянная времени головки самонаведения, Δ - угол между продольной осью головки самонаведения и продольной осью снаряда.
Как правило, для уменьшения амплитуды собственных колебаний какого-либо процесса сигнал управления суммируют с сигналом, пропорциональным скорости изменения этих колебаний, т.е. с сигналом, следующим на частоте собственных колебаний и опережающим их по фазе. Для формирования такого сигнала на борту снаряда необходимо продифференцировать сигнал, пропорциональный угловым колебаниям снаряда по углам атаки и скольжения. Такой сигнал помимо демпфирующей составляющей содержит "паразитную" составляющую, обусловленную возникновением шумов при дифференцировании, что приводит к ухудшению точности наведения.
В данном изобретении предлагается способ управления, заключающийся в том, что помимо угловой скорости вращения ε линии "снаряд-цель" измеряют угловое рассогласование Δ между медленноизменяющей свое положение продольной осью головки самонаведения и быстроизмеющей на частоте собственных колебаний свое положение продольной осью снаряда и суммируют сигнал, пропорциональный данному рассогласованию (k2Δ), с сигналом, пропорциональным угловой скорости вращения линии "снаряд-цель"  так, что сигнал управления снарядом формируется по зависимости:
так, что сигнал управления снарядом формируется по зависимости:
Сигнал k2Δ не является опережающим по фазе собственные колебания снаряда (т. е. результатом дифференцирования), а является запаздывающим по отношению к колебаниям снаряда на величину ϕ = arctg(2πfTг), где f - собственная частота колебаний снаряда (т. е. результатом интегрирования), но за счет знака "минус" при составляющей k2Δ достигается демпфирование колебаний снаряда.
Для измерения угловой скорости вращения линии "снаряд-цель" наибольшее распространение получили следящие головки самонаведения. Такие головки самонаведения состоят, как правило, из координатора, непосредственно связанного с осью ротора гироскопа, ориентируемого в направлении цели с помощью двигателей коррекции. При отклонении оси координатора от направления на цель двигатели коррекции создают управляющие моменты, под действием которых гироскоп прецессирует в направлении совмещения оси координатора с целью. Измеряя величину моментов двигателей коррекции, например, по величине напряжения в обмотках управления, можно определить значение угловой скорости вращения линии "снаряд-цель".
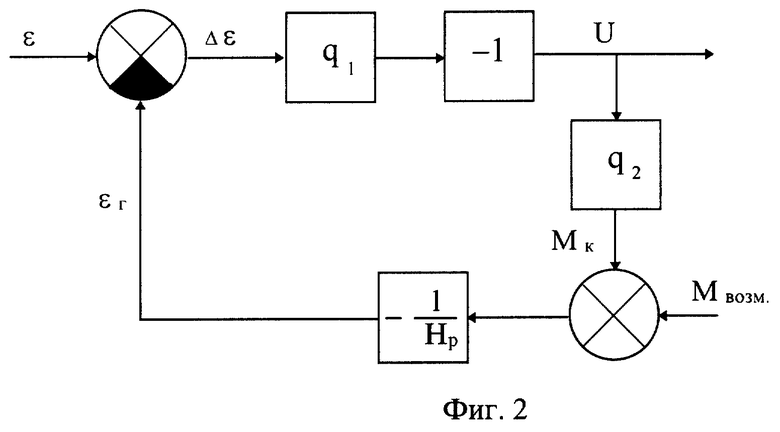
Фиг. 1 представляет собой упрощенную структурную схему головки самонаведения, где:
ε - угловое положение линии "снаряд-цель";
εг - угловое положение продольной оси головки самонаведения;
Δε = ε-εг;
u - сигнал управления (напряжение в обмотках коррекции головки самонаведения);
Mк - момент коррекции;
Mвозм. - возмущающий момент;
q1, q2 - коэффициенты передачи;
H - кинетический момент ротора головки самонаведения;
p - оператор Лапласа.
Анализ структурной схемы [2] показывает, что  где
где
k1 = H/q2, Tг = H/q1q2, т.е. напряжение в обмотках коррекции (сигнал управления) определяется зависимостью 
Однако, как правило, невозможно обеспечить точное измерение угловой скорости вращения линии "снаряд-цель" в силу, например, наличия трения в подшипниках карданова подвеса гироскопа головки самонаведения. Это приводит к тому, что при колебаниях снаряда по углам атаки и скольжения в процессе наведения головка самонаведения также вовлекается в движение. Для вращающегося по крену снаряда это движение такого, что ось головки самонаведения стремится в направлении к продольной оси снаряда [3]. Учитывая, что головка самонаведения, как динамическое звено, представляет собой элемент запаздывания, перемещение оси головки самонаведения в направлении к оси снаряда происходит с некоторым запаздыванием по отношению к изменению (колебаниям) продольной оси снаряда.
Действительно, записав передаточную функцию W(р) = u/Mвозм., получим:
где k2 = 1/q2, Tг = H/q1q2.
Таким образом, сигнал с реальной головки самонаведения при управлении вращающимся по крену снарядом определяется зависимостью 
Анализ выражений (2) и (4) показывает, что они отличаются знаком при составляющей k2Δ. Знак "плюс" при k2Δ вызывает "раскачивание" снаряда, знак "минус" - демпфирование.
Для изменения знака "плюс" на знак "минус" предлагается осуществлять вращение ротора гироскопа головки самонаведения в направлении, противоположном направлению вращения снаряда по крену. При этом воздействие сил трения в кардановом подвесе гироскопа головки самонаведения приводит к возникновению моментов, стремящихся увеличить угловое рассогласование между осью гироскопа и продольной осью снаряда. За счет изменения знака сигнала в головке самонаведения на противоположный и запаздывания этого сигнала по отношению к колебаниям снаряда по углам атаки и скольжения достигается демпфирующий эффект.
В этом случае структурная схема головки самонаведения принимает вид, показанный на фиг. 2.
Из фиг, 2 следует, что сигнал управления определяется зависимостью 
Таким образом, предлагаемый способ управления обеспечивает малые колебания снаряда по углам атаки и скольжения и тем самым высокую точность наведения на цель.
Источники информации:
1. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. М., Машиностроение, 1965, с. 455 - 457.
2. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. М., Наука, 1971, с. 94 - 99.
3. Павлов В.А. Теория гироскопа и гироскопических приборов, Л., Судостроение, 1964, с. 122-124, 152-153.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 2001 |
|
RU2210717C2 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА САМОНАВОДЯЩИМСЯ СНАРЯДОМ | 2011 |
|
RU2482426C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
Изобретение относится к области вооружения, в частности к управляемым артиллерийским снарядам с самонаведением. Указанное изобретение может быть использовано для противотанковых и зенитных ракет, а также для управляемых мин. Техническим результатом изобретения является повышение точности наведения управляемого снаряда за счет демпфирования колебаний, которое достигается введением в сигнал управления, пропорциональный угловой скорости вращения линии снаряд - цель, дополнительной составляющей, следующей на частоте собственных колебаний снаряда и демпфирующей эти колебания. Сущность изобретения: с помощью гироскопической головки самонаведения измеряют угловую скорость вращения  линии снаряд - цель и изменение угловой скорости вращения вектора скорости снаряда в соответствии с сигналом управления (u). Ротор головки самонаведения вращают в направлении, противоположном вращению снаряда по крену, за счет чего сигнал управления формируют по зависимости
линии снаряд - цель и изменение угловой скорости вращения вектора скорости снаряда в соответствии с сигналом управления (u). Ротор головки самонаведения вращают в направлении, противоположном вращению снаряда по крену, за счет чего сигнал управления формируют по зависимости  где k1, k2 - коэффициенты пропорциональности, Тг - постоянная времени головки самонаведения, Δ - угол между продольной осью головки самонаведения и продольной осью снаряда,
где k1, k2 - коэффициенты пропорциональности, Тг - постоянная времени головки самонаведения, Δ - угол между продольной осью головки самонаведения и продольной осью снаряда,  первая производная по времени сигнала управления. 2 ил.
первая производная по времени сигнала управления. 2 ил.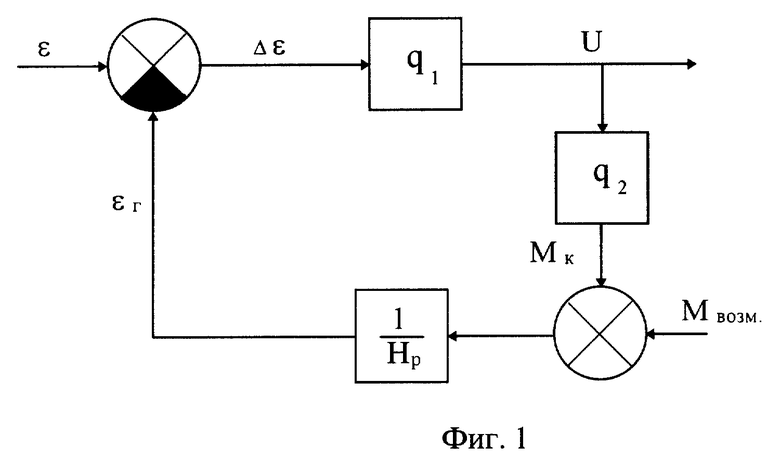
Способ управления самонаводящимся вращающимся снарядом, включающий измерение с помощью гироскопической головки самонаведения угловой скорости вращения  линии снаряд-цель и изменение угловой скорости вращения вектора скорости снаряда в соответствии с сигналом управления (U), отличающийся тем, что ротор головки самонаведения вращают в направлении, противоположном вращению снаряда по крену, а сигнал управления формируют по зависимости
линии снаряд-цель и изменение угловой скорости вращения вектора скорости снаряда в соответствии с сигналом управления (U), отличающийся тем, что ротор головки самонаведения вращают в направлении, противоположном вращению снаряда по крену, а сигнал управления формируют по зависимости
где k1, k2 - коэффициенты пропорциональности;
Тг - постоянная времени головки самонаведения;
Δ - угол между продольной осью головки самонаведения и продольной осью снаряда; первая производная по времени сигнала управления.
первая производная по времени сигнала управления.
| Лебедев А.А., Карабанов В.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с.455-457 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4899955 A, 13.05.90 | |||
| DE 3300709 A1, 12.07.84. | |||

