ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом имеет отношение к глобальной навигационной спутниковой системе (ГНСС) и, конкретнее, к системе и способу для ослабления погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе (ГНСС).
УРОВЕНЬ ТЕХНИКИ
Принимающие устройства в глобальных навигационных спутниковых системах (ГНСС), таких как система глобального позиционирования (GPS - Global Positioning System), используют измерения расстояний, которые основываются на сигналах в пределах прямой видимости от спутников. Принимающее устройство измеряет время прихода одного или более распространяемых сигналов. Это измерение времени прихода сигнала включает в себя измерение времени, основанное на грубом обнаружении кодовой части сигнала, называемом псевдодальностью, и измерение фазы на основании сигнала несущей частоты L-диапазона, включающего в себя L1 на 1,57542 ГГц, L2 на 1,22760 ГГц, а в скором времени будет включать в себя L5 на 1,17645 ГГц. В идеальном случае эти измерения основываются только на прямых сигналах в пределах прямой видимости. Однако реальные сигналы, принимаемые принимающим устройством, являются композицией непосредственно сигналов в пределах прямой видимости и одного или более вторичных отраженных сигналов. Эти вторичные сигналы, известные как многолучевые сигналы, отражаются многочисленными структурами, в том числе зданиями, оборудованием и земной поверхностью.
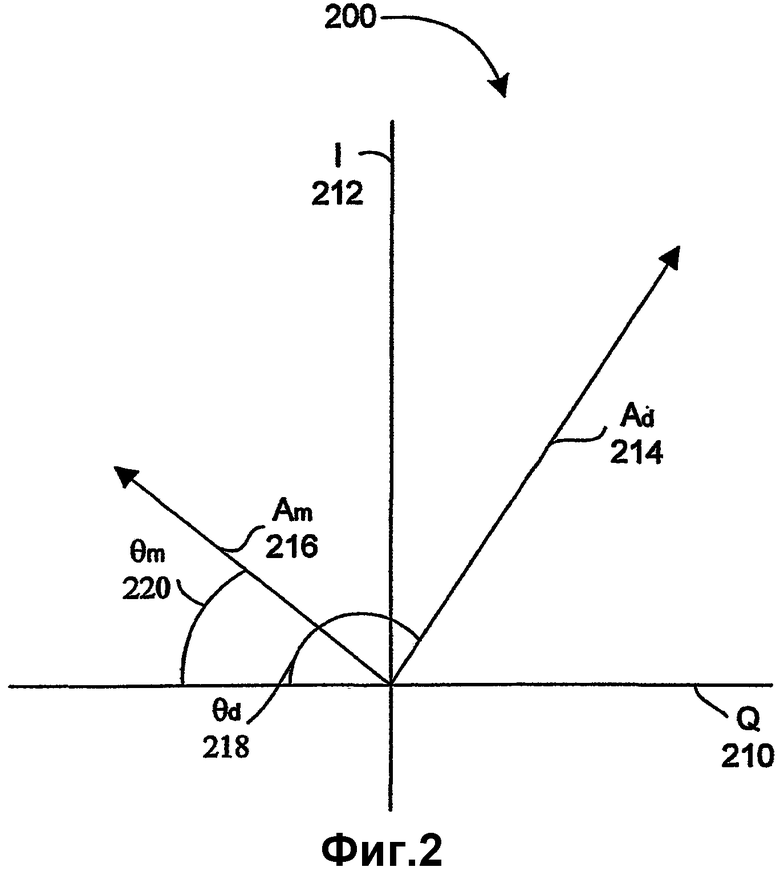
Фиг.1 иллюстрирует составной сигнал в глобальной навигационной спутниковой системе (ГНСС) 100. Устройство 110 принимает сигнал 114 прямого пути и одиночный многолучевой сигнал 116, отраженный от объекта 112. Длина пути многолучевого сигнала 116 длиннее, чем длина пути сигнала 114 прямого пути. Вследствие этого многолучевой сигнал 116 представляет собой несколько задержанную копию сигнала 114 прямого пути, обычно с более низкой амплитудой. Фиг.2 иллюстрирует векторную диаграмму 200 сигналов, принимаемых устройством 110 (Фиг.1), в том числе синфазную I 212 и квадратурную Q 210 составляющие (относящиеся к внутреннему источнику опорного напряжения в устройстве 110 на Фиг.1). Квадратурная составляющая Q 210 имеет фазовое соотношение 90° с синфазной составляющей I 212. Сигнал 114 прямого пути (Фиг.1) обладает амплитудой Ad 214 и фазой  218. Многолучевой сигнал 116 (Фиг.1) обладает амплитудой Am 216 и фазой
218. Многолучевой сигнал 116 (Фиг.1) обладает амплитудой Am 216 и фазой  220. Поскольку многолучевой сигнал 116 (Фиг.1) приходит во время, отличное от времени прихода сигнала 114 прямого пути (Фиг.1), фазы 218 и 220 являются разными.
220. Поскольку многолучевой сигнал 116 (Фиг.1) приходит во время, отличное от времени прихода сигнала 114 прямого пути (Фиг.1), фазы 218 и 220 являются разными.
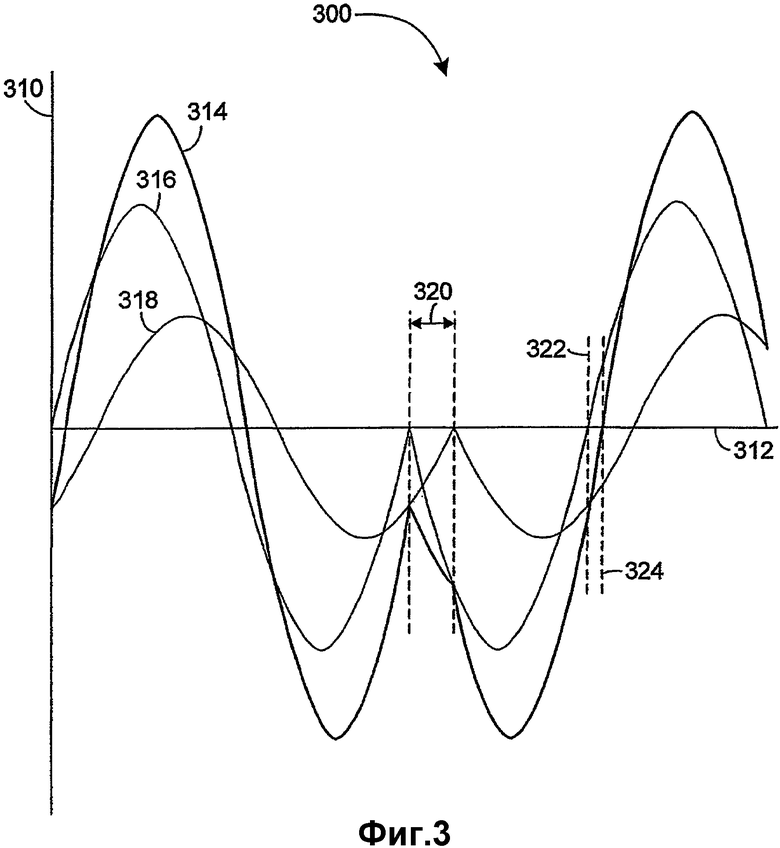
Многолучевые сигналы, такие как многолучевой сигнал 116 (Фиг.1), вызывают искажение в сигнале несущей частоты L-диапазона, также известное как фазовая многолучевость. Фиг.3 иллюстрирует величину 310, зависящую от времени 312, для сигналов синфазного многолучевого искажения 300. Составной сигнал 314, принятый устройством 110 (Фиг.1) является суммой синусоидального сигнала 316 прямого пути и задержанного многолучевого сигнала 318, обычно с меньшей амплитудой. Сигнал 316 прямого пути и многолучевой сигнал 318 кодируются так, что каждый подвергается изменению фазы на 180° по фронту кодового импульса. Заметим, что обращение фазы также известно как кодовый переход. Скорость кодового перехода (также известная как частота фронта кодового импульса) является субгормоникой несущей частоты L-диапазона. Например, для GPS субгормоникой является 154 и 120 для псевдокода на L1 и L2 соответственно. Для кода грубого определения местоположения (CA-кода) частота кодовых импульсов равна 1,023 МГц. Во многих глобальных навигационных спутниковых системах (ГНСС) сигналы кодируются с кодовыми переходами, использующими двухфазный модулирующий код, причем фаза сигнала несущей частоты опережает или запаздывает на 90°. Отличающаяся фаза многолучевого сигнала 318 приводит к значительному искажению в составном сигнале 314 на протяжении временного интервала 320. Однако также присутствуют влияния в других случаях. Например, на этой иллюстрации переход 324 через нуль составного сигнала 314 задерживается, т.е. смещается направо относительно перехода 322 через нуль сигнала 316 прямого пути. В общем случае, многолучевые сигналы могут привести к переходам через нуль составного сигнала 314, который задерживается или опережается. Это очевидное опережение или отставание по фазе вызывает рассогласование по фазе.
Существует потребность в технологии ослабления погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе (ГНСС).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Описываются система и способ для ослабления погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе (ГНСС). В одном варианте осуществления способа принимается составной сигнал. Составной сигнал включает в себя сигнал прямого пути с ограниченной полосой пропускания и, по меньшей мере, один многолучевой сигнал с ограниченной полосой пропускания, каждый из которых модулируется с периодическими обращениями фазы. Составной сигнал измеряется в зависимости от времени на протяжении временного интервала, содержащего, по меньшей мере, одно из периодических обращений фазы. Обусловленная многолучевым сигналом фазовая погрешность  между составным сигналом и сигналом прямого пути определяется согласно измеренному составному сигналу в зависимости от времени и заранее заданной характеристике фильтра, соответствующей фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала. Фазовая погрешность корректируется при навигационных расчетах.
между составным сигналом и сигналом прямого пути определяется согласно измеренному составному сигналу в зависимости от времени и заранее заданной характеристике фильтра, соответствующей фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала. Фазовая погрешность корректируется при навигационных расчетах.
В некоторых вариантах осуществления способа характеристикой фильтра является реакция фильтра на скачок, реакция фильтра на импульс или комплексная передаточная функция фильтра.
В некоторых вариантах осуществления способа, временная задержка  многолучевого сигнала относительно сигнала прямого пути является существенно меньшей, чем время реакции фильтра на скачок, соответствующее фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала.
многолучевого сигнала относительно сигнала прямого пути является существенно меньшей, чем время реакции фильтра на скачок, соответствующее фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала.
В некоторых вариантах осуществления способа определяется временная погрешность  , соответствующая разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и корректируется псевдодальность для погрешности, соответствующей временной погрешности .
, соответствующая разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и корректируется псевдодальность для погрешности, соответствующей временной погрешности .
В варианте осуществления системы устройство, которое ослабляет влияние погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе (ГНСС), включает в себя принимающее устройство, которое принимает составной сигнал. Составной сигнал включает в себя сигнал прямого пути с ограниченной полосой пропускания и, по меньшей мере, один многолучевой сигнал с ограниченной полосой пропускания, каждый из которых модулируется с периодическими обращениями фазы. Устройство дополнительно включает в себя измерительный механизм, который осуществляет дискретизацию составного сигнала в зависимости от времени на протяжении временного интервала, содержащего, по меньшей мере, одно из периодических обращений фазы, процессор и память. Память включает в себя, по меньшей мере, один программный модуль, который исполняется процессором, причем, по меньшей мере, один программный модуль содержит инструкции для определения обусловленной многолучевым сигналом фазовой погрешности между составным сигналом и сигналом прямого пути, согласно измеренному составному сигналу в зависимости от времени и заранее заданной характеристики фильтра, использующегося для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала. Устройство выполнено с возможностью коррекции фазовой погрешности  при навигационных расчетах.
при навигационных расчетах.
В некоторых вариантах осуществления системы характеристикой фильтра является реакция фильтра на скачок, реакция фильтра на импульс или комплексная передаточная функция фильтра.
В некоторых вариантах осуществления системы временная задержка многолучевого сигнала относительно сигнала прямого пути является существенно меньшей, чем время реакции фильтра на скачок, соответствующее фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала.
В некоторых вариантах осуществления системы, по меньшей мере, один программный модуль дополнительно содержит инструкции для определения временной погрешности Δt, причем временная погрешность Δt соответствует разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и коррекции погрешности в псевдодальности, соответствующей временной погрешности Δt.
Предусматриваются дополнительные изменения в вариантах осуществления способа и системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные задачи и признаки изобретения будут лучше видны из следующего подробного описания и прилагаемой формулы изобретения, рассматриваемых совместно с чертежами.
Фиг.1 является схемой, иллюстрирующей глобальную навигационную спутниковую систему (ГНСС) с сигналом прямого пути и многолучевым сигналом.
Фиг.2 иллюстрирует векторную диаграмму синфазной и квадратурной составляющих сигнала прямого пути и многолучевого сигнала.
Фиг.3 иллюстрирует фазовое многолучевое искажение составного сигнала.
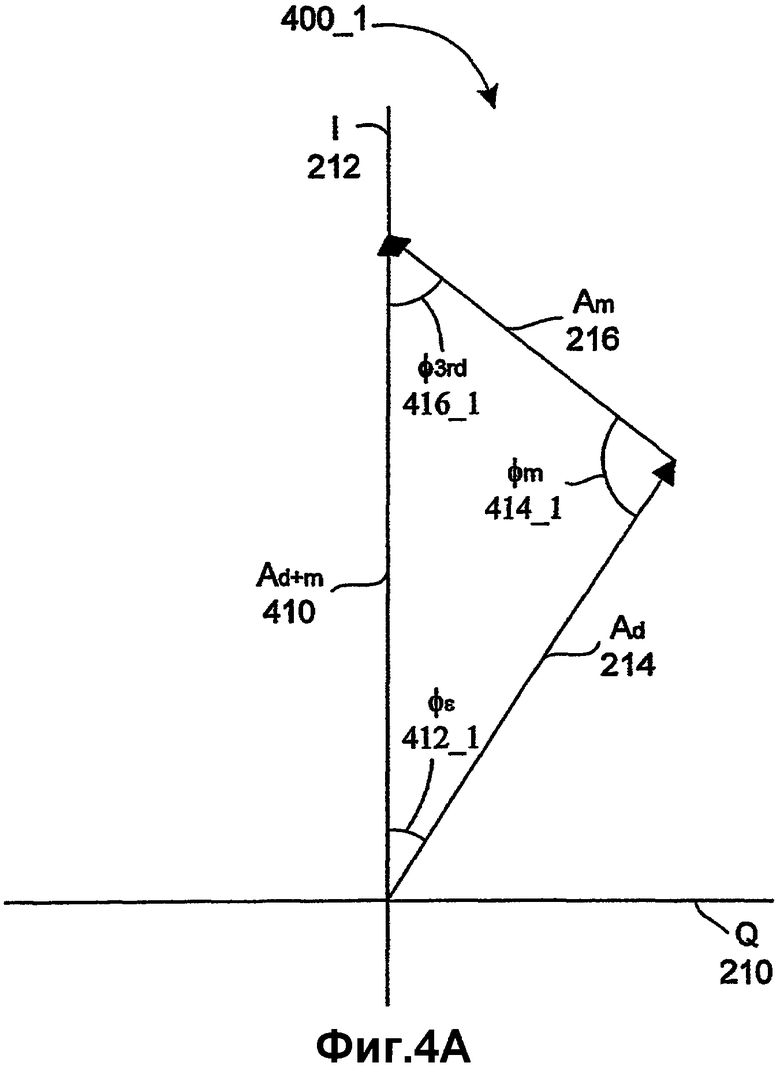
Фиг.4A иллюстрирует отслеживаемый вектор в устройстве в глобальной навигационной спутниковой системе (ГНСС).
Фиг.4B иллюстрирует отслеживаемый вектор в устройстве после того, как сигнал прямого пути подвергнут обращению фазы.
Фиг.4C иллюстрирует отслеживаемый вектор в устройстве после того, как сигнал прямого пути и многолучевой сигнал подвергнуты обращению фазы.
Фиг.5 иллюстрирует реакцию фильтра на скачок и погрешность слежения принимающего устройства, вызванную многолучевым распространением.
Фиг.6 иллюстрирует реакцию фильтра на скачок для сигнала прямого пути, многолучевого сигнала и составного сигнала.
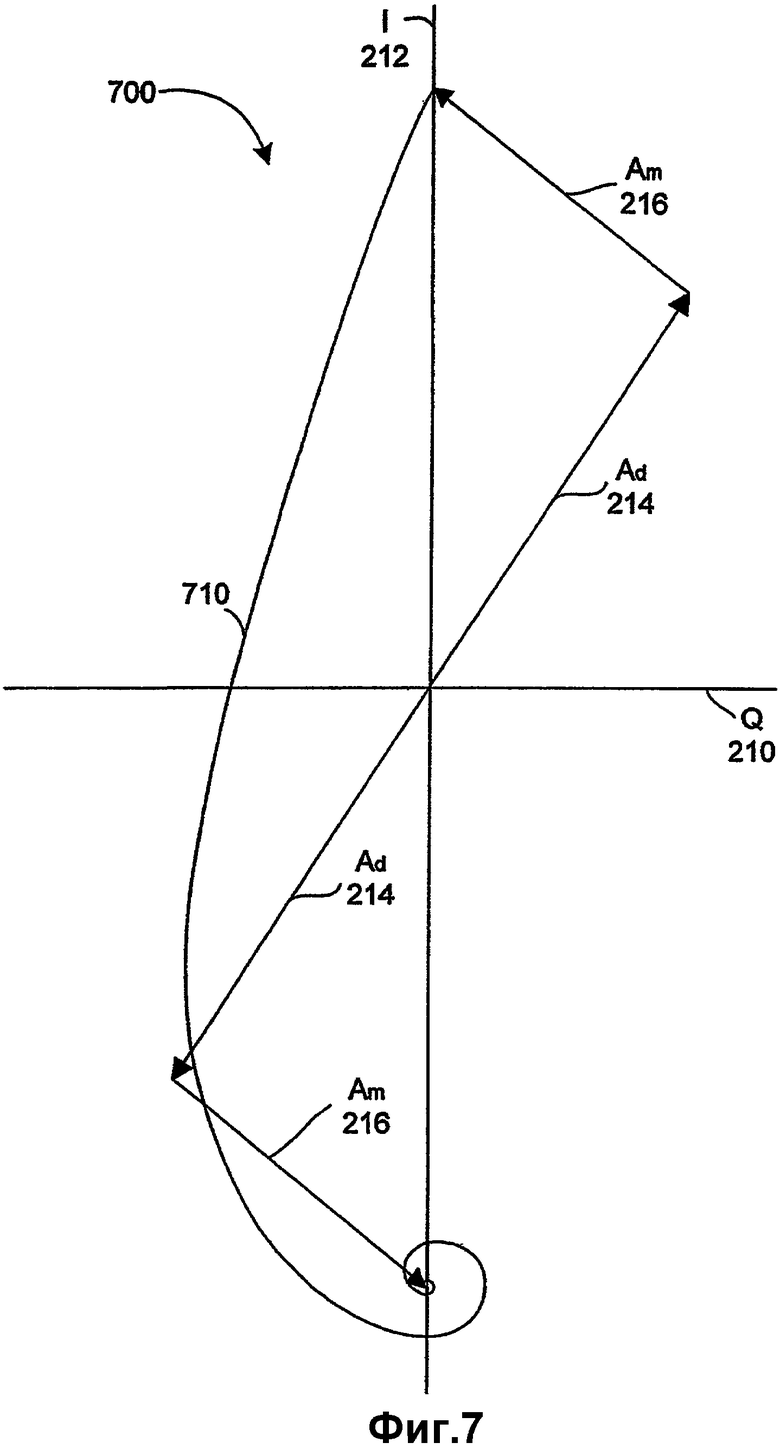
Фиг.7 иллюстрирует отслеживаемый вектор во время обращения фазы сигнала прямого пути с ограниченной полосой пропускания и многолучевого сигнала с ограниченной полосой пропускания.
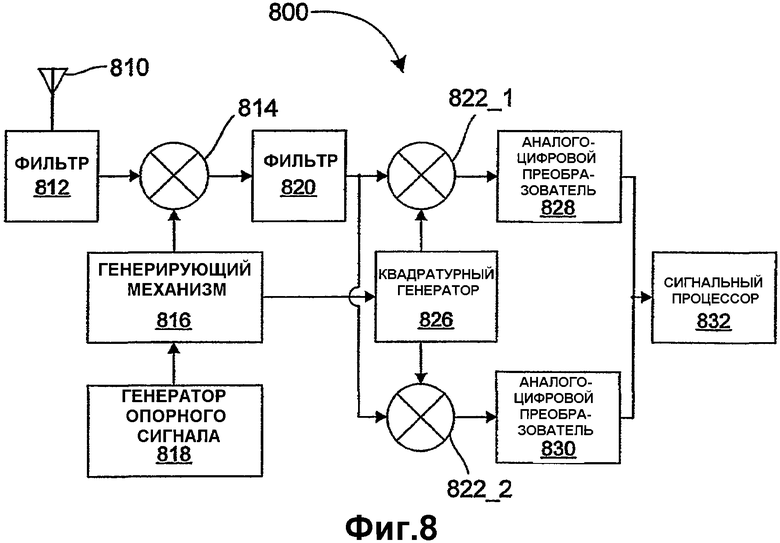
Фиг.8 является структурной схемой внешней электронной аппаратуры в типичном устройстве для использования в глобальной навигационной спутниковой системе (ГНСС).
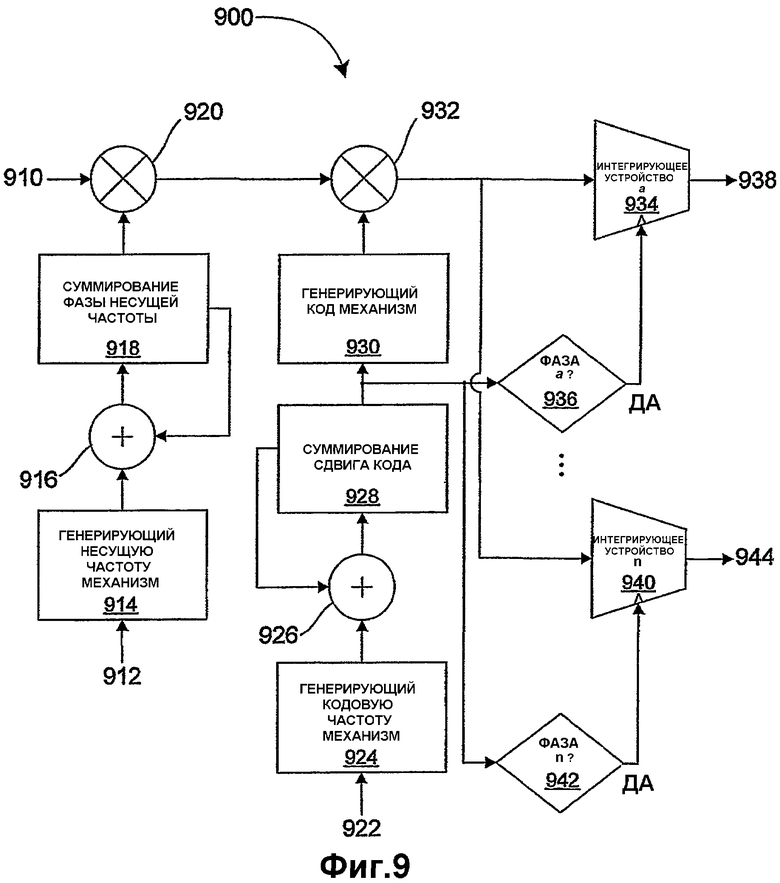
Фиг.9 является структурной схемой обработки сигналов в типичном устройстве для использования в глобальной навигационной спутниковой системе (ГНСС).
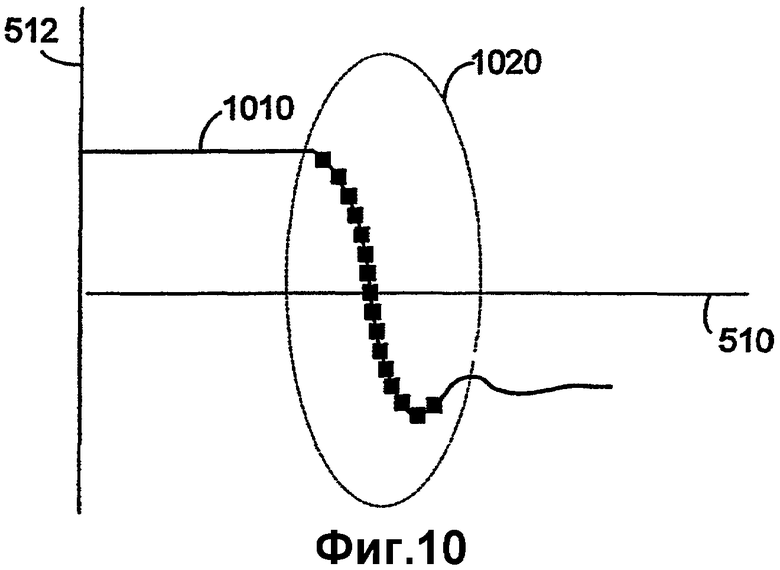
Фиг.10 иллюстрирует накопители, осуществляющие дискретизацию реакции фильтра на скачок.
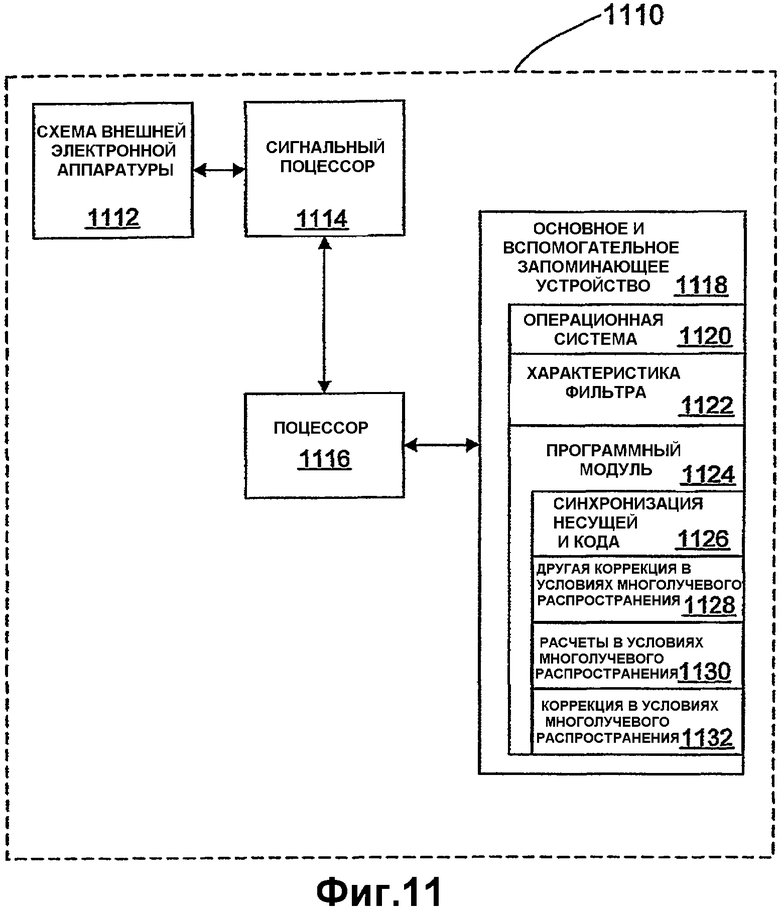
Фиг.11 является структурной схемой, иллюстрирующей компоненты типичного устройства для использования в глобальной навигационной спутниковой системе (ГНСС).
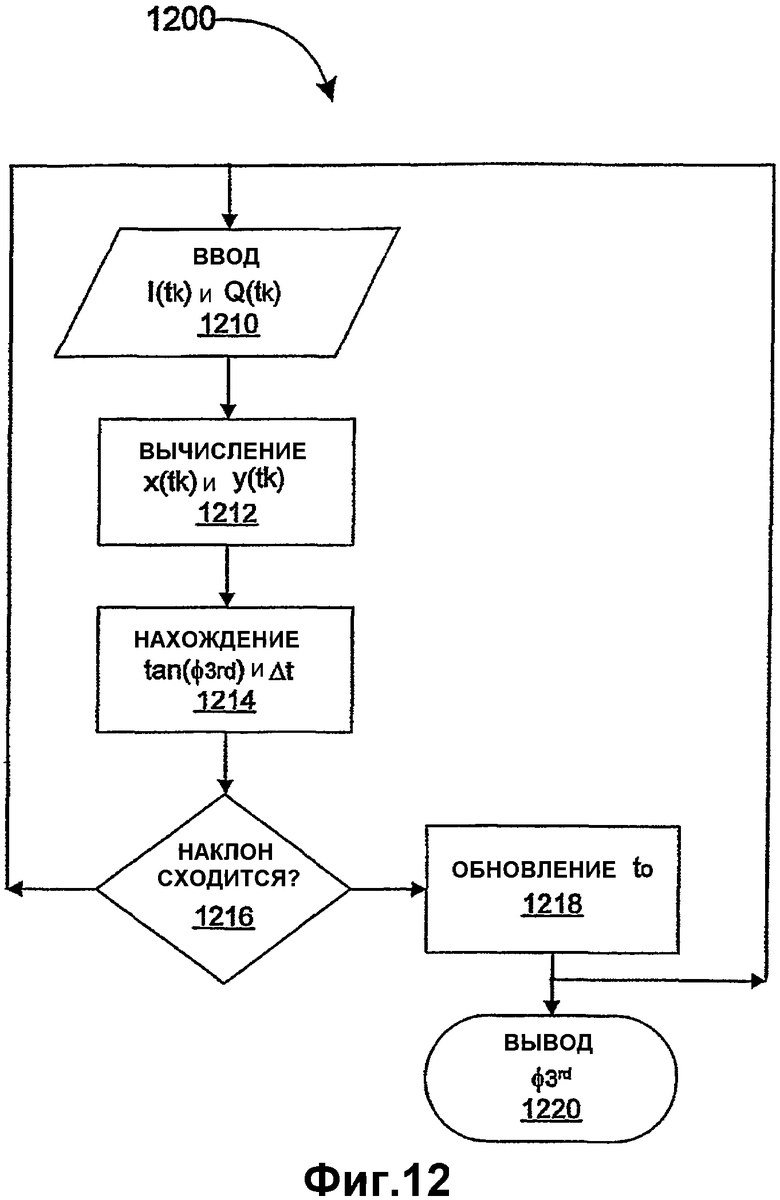
Фиг.12 является блок-схемой, иллюстрирующей первую процедуру в технологии для определения погрешности, вызванной многолучевым распространением.
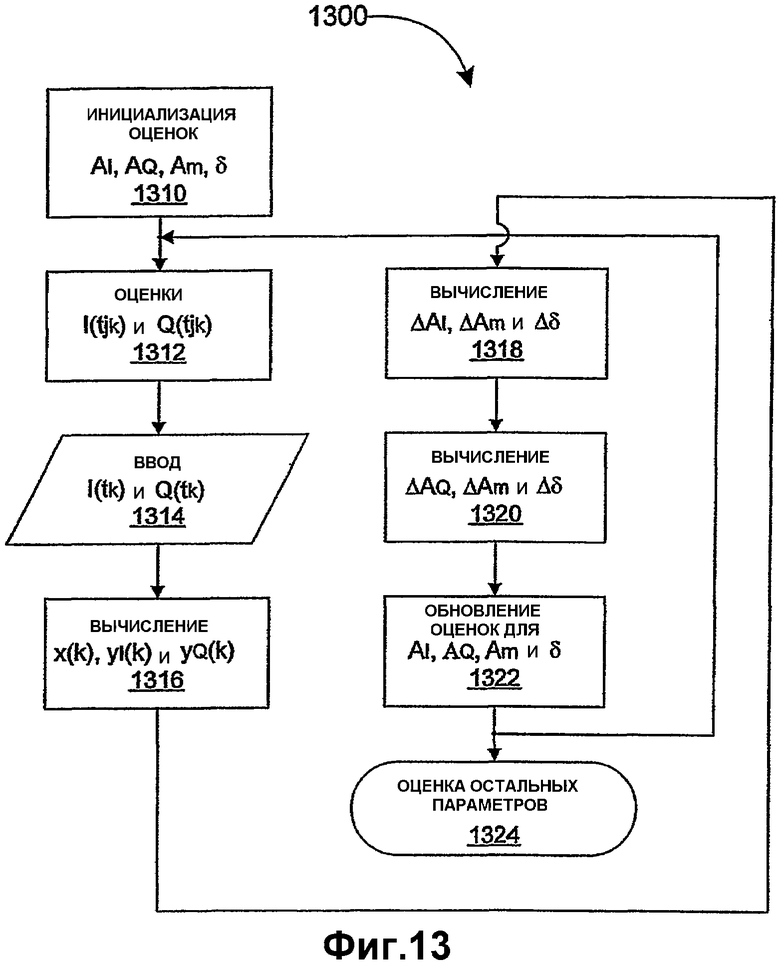
Фиг.13 является блок-схемой, иллюстрирующей вторую процедуру в технологии для определения погрешности, вызванной многолучевым распространением.
Одинаковые номера ссылочных позиций относятся к подобным частям на всех отдельных видах чертежей.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Обратимся к Фиг.3, составной сигнал 314 имеет сложную, но предсказуемую форму на протяжении временного интервала 320 между фронтом кодового импульса для сигнала 316 прямого пути и фронтом кодового импульса для многолучевого сигнала 318. Наблюдаемые характеристики принятого составного сигнала 314 на протяжении временного интервала 320 используются в системе и способе определения и ослабления одной или более погрешностей, вызванных многолучевым распространением.
Для иллюстрирования системы и способа используется GPS. Однако система и способ не ограничиваются GPS. Они могут применяться в других глобальных навигационных спутниковых системах (ГНСС), включающих в себя, но не ограничивающихся этим, Глобальную Навигационную Спутниковую Систему (ГЛОНАСС), систему позиционирования GALILEO, Европейскую Геостационарную Дополнительную Навигационную Систему (EGNOS - European Geostationary Navigation Overlay System), Широкозонную Усиливающую Систему (WAAS - Wide Area Augmentation System), Многофункциональную Транспортную Спутниковую Усиливающую Систему (MSAS - Multifunctional Transport Satellite-Based Augmentation System) и Квазизенитную Спутниковую Систему (QZSS - Quasi-Zenith Satellite System).
В GPS сигнал несущей частоты L-диапазона кодируется с использованием широкополосного кода с псевдослучайным шумом с двухфазной модуляцией. Обработка базового сигнала, выполненная устройством 110 (Фиг.1) в составном сигнале 314, является технологическим процессом системы слежения, который согласовывает фазу опорного (ожидаемого) сигнала, созданного устройством 110 (Фиг.1), с фазой составного сигнала 314, принятого, по меньшей мере, от одного спутника. Синхронизация, используемая при создании опорного сигнала, обеспечивает абсолютный код измерения псевдодальности и измерения фазы несущей, сделанные устройством 110 (Фиг.1). Технологическому процессу слежения устройства 110 (Фиг.1) непросто отличить сигнал 316 прямого пути от многолучевого сигнала 318, поэтому он отслеживает составной сигнал 314. Фиг.4A является иллюстрацией технологического процесса 400_1 системы слежения, где отслеживаемый вектор, амплитуда Ad+m 410 составного сигнала, является векторной суммой амплитуды 214 сигнала прямого пути и амплитуды 216 многолучевого сигнала. Амплитуда Ad+m 410 составного сигнала и, следовательно, копия сигнала, используемая при измерении фазы, имеет фазовую погрешность 412_1 относительно амплитуды 214 сигнала прямого пути. Также Фиг.4A иллюстрирует разность фаз  414_1 между амплитудой 214 сигнала прямого пути и амплитудой 216 многолучевого сигнала и фазу
414_1 между амплитудой 214 сигнала прямого пути и амплитудой 216 многолучевого сигнала и фазу  416_1, которая равна 180 градусов (или, что то же самое,
416_1, которая равна 180 градусов (или, что то же самое,  радиан) минус сумма 412_1 и 414_1. Фиг.4A соответствует временам, предшествующим временному интервалу 320 (Фиг.3).
радиан) минус сумма 412_1 и 414_1. Фиг.4A соответствует временам, предшествующим временному интервалу 320 (Фиг.3).
Обратимся к Фиг.3, поведение составного сигнала 314 несущей частоты на протяжении временного интервала 320, когда фронт кодового импульса начинается в сигнале 316 прямого пути и заканчивается в многолучевом сигнале 318, является наблюдаемым с помощью устройства 110 (Фиг.1). Поскольку многолучевой сигнал 318 запаздывает относительно сигнала 316 прямого пути, кодовые переходы сигнала несущей частоты, соответствующего фронту кодового импульса, происходят позднее в многолучевом сигнале 318. Первый подход к ослаблению погрешностей, вызванных многолучевым распространением, использующий эту характеристику, проиллюстрирован на Фиг.4B и 4C.
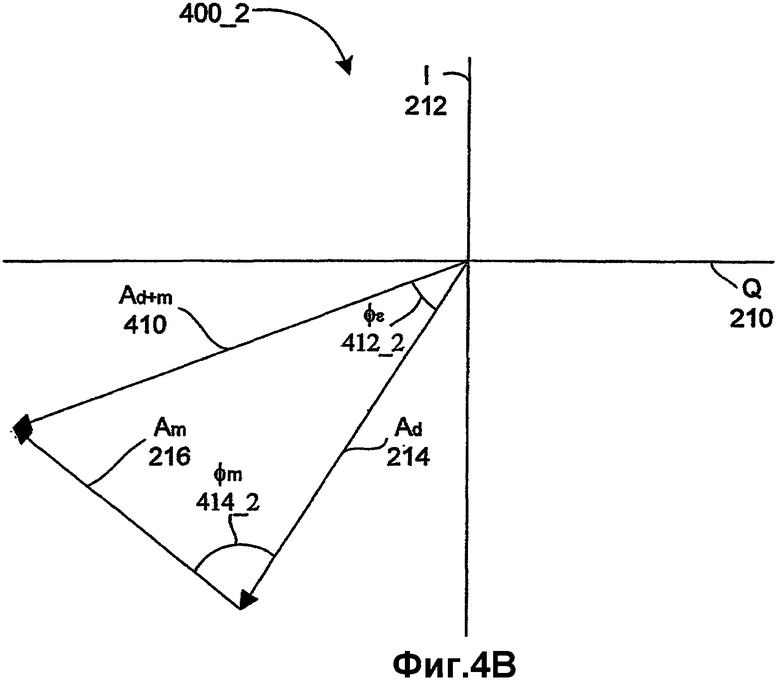
Обратимся к Фиг.4B, вследствие временной задержки многолучевого сигнала 116 (Фиг.1) относительно сигнала 114 прямого пути (Фиг.1), обращение фазы для сигнала 316 прямого пути (Фиг.3) происходит на устройстве 110 (Фиг.1) до многолучевого сигнала 318 (Фиг.3). Это приводит к другой фазе (не показано) для составного сигнала 314 (Фиг.3), и новым значениям для фазовой погрешности 412_2 и разности фаз 414_2 в технологическом процессе 400_2 слежения. Фиг.4B соответствует временам на протяжении временного интервала 320 (Фиг.3).
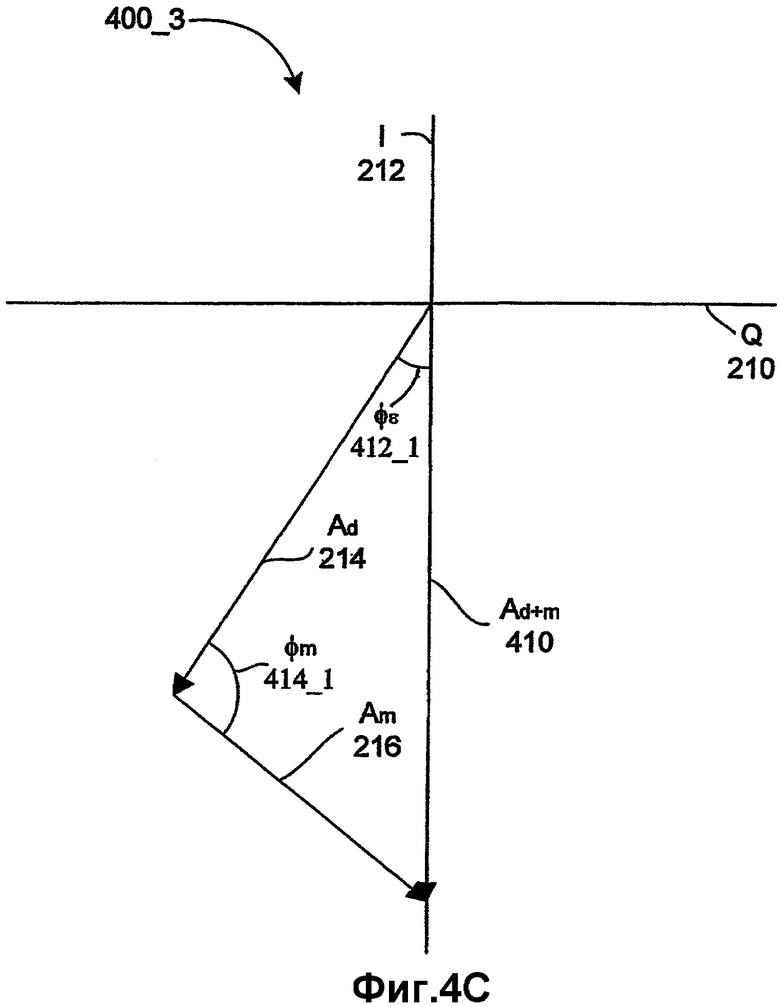
Обратимся к Фиг.4C, после того, как произошло обращение фазы для многолучевого сигнала 318 (Фиг.3), будут иметь место первоначальная фаза (не показано) для составного сигнала 314 (Фиг.3), а фазовая погрешность 412_1 и разность фаз 414_1 в технологическом процессе 400_3 слежения возвратятся к значениям в технологическом процессе 400_1 слежения. Фиг.4C соответствует временам после временного интервала 320 (Фиг.3).
С помощью измерения фазы составного сигнала 314 (Фиг.3) на Фиг.4B, после кодового перехода сигнала 316 прямого пути (Фиг.3), но до кодового перехода многолучевого сигнала 318 (Фиг.3), может быть вычислена фазовая погрешность 412_1 в технологическом процессе 400_1 слежения. Обратимся к Фиг.3, первая технология, однако, предполагает, что кодовые переходы и в сигнале 316 прямого пути и в многолучевом сигнале 318 происходят мгновенно. Это предположение не верно вследствие фильтрации в устройстве 110 (Фиг.1), и/или одном или более спутниках, которые ограничивают полосу пропускания сигнала 316 прямого пути и многолучевого сигнала 318. Следовательно, первый метод применим для коррекции погрешностей, вызванных многолучевым распространением, только когда временная задержка является достаточно большой, чтобы позволить фильтрованному кодовому переходу сигнала 316 прямого пути достичь устойчивого состояния прежде, чем начнется фильтрованный переход кодового импульса многолучевого сигнала 318 для перехода. Это ограничивает первый метод более длинными запаздываниями при многолучевости. К сожалению, многолучевые сигналы, которые производят наиболее долговременные фазовые погрешности в технологическом процессе слежения, таком как технологический процесс слежения 400_1 (Фиг.4A), которые, в свою очередь, приводят к погрешностям измерения фазы, обычно имеют запаздывания намного меньшие, чем время реакции фильтра на скачок одного или более фильтров в устройстве 110 (Фиг.1) и/или одного или более спутников.
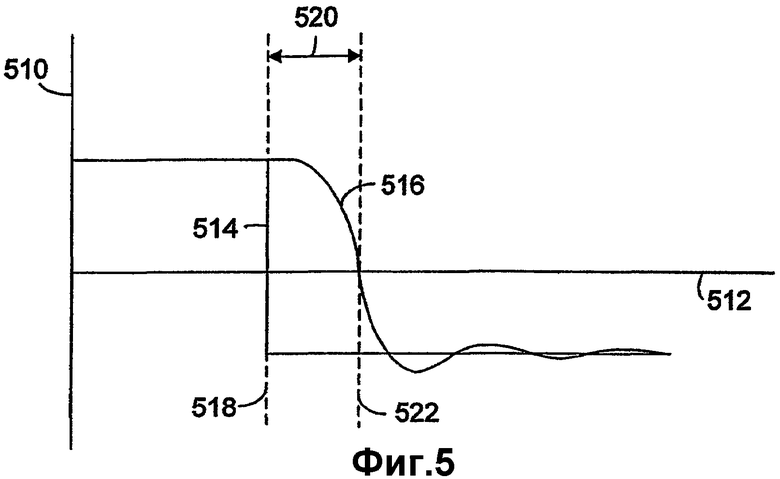
Дополнительное понимание ограничений первой технологии может дать сравнение реакции фильтра на скачок полосового фильтра, который является типичным для высокоточных глобальных навигационных спутниковых систем (ГНСС) и мгновенной реакции фильтра на скачок, такой, которая предполагается в существующей технологии. Фиг.5 иллюстрирует величину 510 в зависимости от времени 512 мгновенной реакции 514 фильтра на скачок и реакции 516 фильтра на скачок 6-полюсного фильтра Баттерворта с промежуточной частотой, эквивалентной ширине полосы пропускания 30 МГц. Отметим здесь временную погрешность 520 между временем t1 522, соответствующим переходу через нуль при реакции 516 фильтра на скачок, и временем 518, соответствующим идеальной мгновенной реакции 514 на скачок. При наличии временной задержки, присущей любой реакции фильтра, исключенной из схемы, временная погрешность 520 иллюстрирует погрешность слежения за кодом, вызванную многолучевостью кода. Некоторые устройства для сравнительного анализа данных сложной конструкции, например тех, которые используют двойную дельта-коррекцию, снижают эту погрешность, но не устраняют ее.
Ширина полосы пропускания 30 МГц достаточна для принимающих устройств в нынешних высокоточных глобальных навигационных спутниковых системах (ГНСС), но полосы пропускания такой величины становятся более универсальными по мере того, как увеличиваются скорости обработки сигналов, отчасти для обеспечения больших возможностей для наблюдения многолучевых сигналов. Кроме того, эта ширина полосы пропускания типична для полос частот сигнала, поддерживаемых современными спутниками в глобальных навигационных спутниковых системах (ГНСС). Некоторые стандартные фильтры с шириной полосы пропускания 30 МГц имеют время реакции фильтра на скачок почти 50 нс на переходе обращения фазы и не достигают устойчивого состояния в течение почти 150 нс. Другие фильтры имеют время реакции фильтра на скачок почти 40 нс на переходе обращения фазы и устойчивое состояние не достигается в течение почти 200 нс (т.е. время реакции фильтра на скачок, соответствующее фильтру, находится между 40 нс и 200 нс, а в большинстве случаев меньше или равно 200 нс). Другие фильтры имеют ширину полосы пропускания 10 МГц и время реакции фильтра на скачок меньше чем 1 мкс. Технологические процессы слежения 400 на Фиг.4A-4C являются приемлемой моделью только если временная задержка больше, чем примерно 50 нс, которая требует, чтобы отличие длины пути сигнала 114 прямого пути (Фиг.1) и многолучевого сигнала 116 (Фиг.1) было, по меньшей мере, 50 футов.
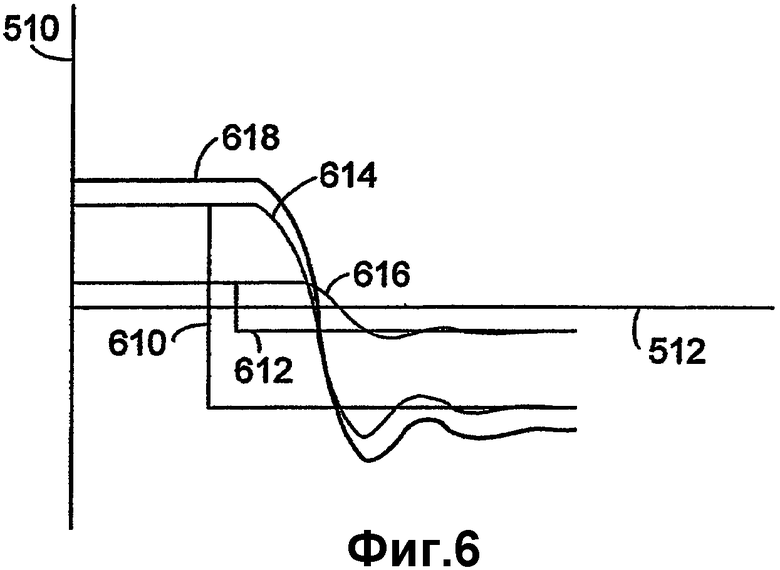
Результаты реакции фильтра на скачок для сигналов прямого пути, многолучевых и составных проиллюстрированы на Фиг.6, включающей в себя мгновенную реакцию 610 фильтра для прямого пути, мгновенную реакцию 612 фильтра для многолучевости, реакцию 614 фильтра на скачок для прямого пути, реакцию 616 фильтра на скачок для многолучевости и составную реакцию 618 фильтра на скачок. Заметим, что в дополнение к реакции фильтра на скачок, такой как реакция 516 фильтра на скачок (Фиг.5), фильтровые характеристики фильтров, в принимающих устройствах, например в устройстве 110 (Фиг.1) и/или в одном или более спутниках, могут также быть описаны, основываясь на реакции фильтра на импульс или на комплексной передаточной функции фильтра.
Фиг.7 иллюстрирует технологический процесс 700 слежения для отслеживания многолучевого сигнала 116 (Фиг.1), имеющего разность длины пути менее чем 50 футов на протяжении переходов кодового импульса для сигнала 316 прямого пути (Фиг.3) и многолучевого сигнала 318 (Фиг.3). На этом чертеже сигнал 316 прямого пути (Фиг.3) и многолучевой сигнал 318 (Фиг.3) ограничиваются по полосе пропускания с использованием фильтра, обладающего реакцией фильтра на скачок такой, как реакция 516 фильтра на скачок (Фиг.5). Составляющие I 212 и Q 210 технологического процесса 700 слежения на протяжении переходов кодовых импульсов следуют по траектории 710, а не мгновенными переходами, показанными на Фиг.4A-4C. Заметим, что траектория 710 показывает, что вектор, отображающий многолучевой сигнал 216 (Фиг.2) начинает кодовый переход до того, как вектор, отображающий сигнал 214 прямого пути (Фиг.2), завершит свой кодовый переход. Как описано ниже, подбором измеренной траектории 710 на протяжении кодовых переходов в сигнале 114 прямого пути (Фиг.1) и многолучевом сигнале 116 (Фиг.1) согласно, по меньшей мере, заранее заданной характеристике фильтра, такой как реакция 516 фильтра на скачок (Фиг.5), могут быть определены и ослаблены одна или более погрешностей, вызванных многолучевым распространением.
На Фиг.8 показана структурная схема типичной электронной аппаратуры 800 принимающего устройства в устройстве, таком как устройство 110 (Фиг.1). Антенна 810 принимает сигнал от одного или более спутников. В некоторых вариантах осуществления антенна 810 оборудуется встроенным усилителем. Сигнал проходит через широкополосный фильтр 812, чтобы исключить внеполосную помеху. После фильтрования сигнал состоит из сигнала несущей частоты L-диапазона, который охватывает 10 МГц или более широкую полосу пропускания посредством широкополосного кода с псевдослучайным шумом. Полное содержание информации сигнала определяется шириной полосы пропускания спутника. В одном варианте осуществления эта ширина полосы пропускания является немного меньшей, чем 30 МГц.
Затем сигнал L-диапазона преобразуется с понижением частоты до промежуточной или основной частоты полосы в преобразователе 814 частоты, путем смешения с сигналом, сгенерированным генерирующим механизмом 816 на базе генератора 818 опорного сигнала, и фильтруется полосовым фильтром 820. Этап преобразования с понижением частоты обычно присутствует, но не является обязательным, потому что намного проще осуществить дискретизацию и фильтрацию сигналов на частотах в несколько сотен Мегагерц или ниже, чем необходимо для работы с сигналами на частотах 1-2 ГГц передаваемого сигнала несущей частоты L-диапазона. Ширина полосы пропускания конечного фильтра 820 должна быть, по меньшей мере, шириной полосы пропускания спутникового сигнала (например, 30 МГц), в противном случае часть информационного содержимого спутникового сигнала будет потеряна. В частности, фрагменты кодовых переходов ухудшаются, если ширина полосы пропускания фильтра 820 меньше, чем ширина полосы пропускания спутника, которая для новейших GPS-спутников равна приблизительно 30 МГц.
Квадратурный генератор 826 и преобразователи 822_1 и 822_2 частоты генерируют синфазную I 212 и квадратурную 210 составляющие отфильтрованных сигналов. В некоторых вариантах осуществления квадратурный генератор 826 и преобразователи 822 частоты также обеспечивают конечное преобразование с понижением частоты сигналов до основной полосы частот. Синфазный I и квадратурный Q сигналы преобразуются из аналоговой формы в цифровую с помощью аналого-цифровых преобразователей 828 и 830. В некоторых вариантах осуществления синфазные I сигналы и квадратурные Q сигналы жестко ограничиваются или отсекаются. Цифровые отсчеты обрабатываются устройством 832 обработки сигналов (сигнальным поцессором).
Заметим, что в некоторых вариантах осуществления используются многоразрядные аналого-цифровые преобразования, чтобы ограничить потери при обработке сигналов. Кроме того, аналого-цифровые преобразователи 828 и 830 могут иметь очень узкие апертуры (окна) дискретизации, поэтому привязка по времени отсчетов точно известна. Преобразователи с широкой апертурой производят отсчеты, которые являются средним значением аналогового сигнала за апертурный период, что эквивалентно затуханию высокочастотного спектра сигнала, который дискретизируют. Кроме того, частота дискретизации аналого-цифровых преобразователей 828 и 830 должна превышать условия Найквиста, определяемых шириной информационной полосы частот сигналов. Поскольку спутниковые сигналы имеют ширину информационной полосы частот примерно 30 МГц, принимающее устройство должно или производить комплексное (синфазной составляющей I и квадратурной составляющей Q) измерение с частотой равной или большей, чем 30 МГц или реальные измерения (с единственным аналого-цифровым преобразователем) с частотой, которая является, по меньшей мере, удвоенной шириной информационной полосы частот. В иллюстративном варианте осуществления устройства 110 (Фиг.1), комплексные измерения производятся с частотой 40 МГц.
Фиг.9 является структурной схемой устройства 900 обработки сигналов, пригодного для использования в качестве устройства 832 обработки сигналов на Фиг.8. Фиг.9 изображает отдельный канал принимающего устройства. В некоторых принимающих устройствах есть 10-50 приблизительно одинаковых каналов для приема сигналов от разных спутников. Заметим, что для выполнения функций обработки сигналов, описанных ниже, принимающее устройство должно уже обладать возможностью когерентного отслеживания сигналов от одного или более спутников. В частности, должна иметь место синхронизация с несущей, причем доплеровское смещение частоты опорного сигнала в системе отслеживания несущей (не показано) в принимающем устройстве согласуется с доплеровским смещением частоты сигнала несущей частоты, и синхронизация кода, определяемая системой отслеживания кода (не показано) в принимающем устройстве, которое предоставляет возможность восстановления максимума мощности сигнала в широкополосном коде с псевдослучайным шумом.
Устройство 900 обработки сигналов принимает синфазный I и квадратурный Q отсчеты 910 от внешней электронной аппаратуры 800 принимающего устройства. Отсчеты 910 микшируются в преобразователях 920 и 932 частоты с опорными сигналами для сигнала несущей частоты и кодового сигнала. В некоторых вариантах осуществления микширование в преобразователях 920 и 932 частоты может быть выполнено в обратном порядке или может быть объединено в один этап микширования. Микширование в преобразователе 920 частоты состоит из комплексного вращения синфазного I и квадратурного Q отсчетов 910 на угол, соответствующий фазе опорного сигнала для сигнала несущей частоты. Угол формируется выходными данными 912 от системы отслеживания несущей, которая приводит в действие генерирующий несущую частоту механизм 914. Суммирующее устройство 916 и суммирование 918 фазы несущей частоты формируют текущее цифровое суммирование, соответствующее фазе. Вращение может быть выполнено на отсчетах 910 на частоте кодовых импульсов. Это вращение устраняет любое доплеровское смещение и любые остаточные вращения фазы промежуточной частоты от отсчетов 910. В некоторых вариантах осуществления вращение происходит достаточно быстро для удовлетворительного, т.е. с измеримой потерей в контрольно-измерительной аппаратуре, устранения любого доплеровского смещения и/или любых остаточных вращений фазы промежуточной частоты от отсчетов 910. Система отслеживания несущей, которая управляет фазой и частотой опорного сигнала для сигнала несущей частоты посредством обратной связи, может быть реализована в специализированной интегральной схеме (СИС), в программном обеспечении или комбинации СИС и программного обеспечения. Если фаза и частота опорного сигнала для сигнала несущей частоты верны, результатами вращения являются отсчеты в реальной полосе частот передачи с нулевым доплеровским смещением.
Микширование в преобразователе частот 932 удаляет широкополосный код с псевдослучайным шумом из отсчетов (выборок). Фазой и привязкой по времени кода управляет обратная связь от системы отслеживания кода, которая может быть реализована в СИС, в программном обеспечении или комбинации СИС и программного обеспечения. Выходные данные 922 от системы отслеживания кода приводят в действие генерирующий кодовую частоту механизм 924. Суммирующее устройство 926 и суммирование 928 сдвига кода генерируют текущую цифровую сумму. Выходные данные суммирования 928 сдвига кода приводят в действие генерирующий код механизм 930. Для двухфазной модуляции выходные данные от генерирующего код механизма 930 равны ± 1, что соответствует двухпозиционной фазовой манипуляции. Выходные данные генерирующего код механизма 930 могут изменять знак только с частотой фронта кодового импульса.
Если фаза и частота опорного сигнала для кодового сигнала верны, код удаляется из отсчетов, и говорят, что отсчеты коррелированны. Получающиеся отсчеты с суженным спектром представляют собой постоянные, с нулевым доплеровским смещением отсчеты (постоянная составляющая доплеровского смещения), которые могут быть проинтегрированы по времени. Успешно коррелированные отсчеты могут суммироваться для длительных интервалов, чтобы улучшить отношение сигнал-шум при измерениях. Если привязка по времени опорного сигнала для кодового сигнала меньше, чем один период кодового импульса в погрешности (для кода грубого определения местоположения, например, период кодового импульса равен приблизительно 1 микросекунде, обратное преобразование частоты кодового импульса), то последовательные отсчеты декоррелируются, и интегрирование по времени дает меньший результат, чем успешно коррелированные отсчеты. Если привязка по времени опорного сигнала для кодового сигнала больше чем один период кодового импульса в погрешности, то последовательные отсчеты не коррелируются, и интегрирование по времени дает результат близкий к нулевому среднему.
Отсчеты спутникового сигнала могут быть классифицированы согласно фазе генерирующего несущую частоту механизма 914 и генерирующего кодовую частоту механизма 924. Как правило, система отслеживания несущей использует все отчеты, поскольку это обеспечивает лучшее отношение сигнал-шум. С другой стороны, система отслеживания кода обычно использует подмножество отсчетов, в зависимости от использующегося детектора погрешностей, например, с двойной дельтой, стробирующий коррелятор или коррелятор амплитуды импульса. В некоторых вариантах осуществления, чтобы получить лучшее подавление многолучевости, используется только часть измеренных отсчетов, соответствующих кодовым переходам, которые находятся рядом с фронтами кодовых импульсов. Например, система отслеживания кода может быть выполнена с возможностью суммирования только тех отсчетов, имеющих коэффициент сдвига кода, которые находятся в промежутке 0,75-0,25 периодам импульсов псевдокода (0,75-1,0 и 0,0-0,25). В этом примере отсчеты с фазами между 0,25 и 0,75 (больше, чем 0,25, и меньше, чем 0,75) отбрасываются системой отслеживания кода.
Отсчеты спутниковых сигналов (кроме тех, которые отброшены) направляются к группе накопителей. Узлы 936 и 942 проверяют фазу суммирования 928 сдвига кода и дают возможность соответствующему интегрирующему устройству (например, одному из интегрирующих устройств 934 и 940, которые дают на выходе данные 938 и 944) интегрировать отдельный отсчет. Несмотря на то, что на Фиг.9 показаны два накопителя, могут иметься дополнительные накопители. Как правило, для данного канала принимающего устройства имеется от 8 до 32 накопителей, каждый из которых используется для накопления отсчетов спутниковых сигналов для диапазона фаз, соответствующих этому накопителю. В иллюстративном варианте осуществления имеется 16 накопителей. Использование множественных накопителей на канал дает возможность отслеживания траектории перехода, такой как траектории 710 (Фиг.7). Кроме того, может использоваться большее число накопителей, чтобы увеличить скорость поиска кода во время обнаружения сигнала.
Фиг.10 предоставляет иллюстрацию отсчетов 1020 соответствующих шестнадцати накопителям относительно реакции 1010 фильтра на скачок. Интегральные отсчеты 1020 генерируются выборочным интегрированием синфазных I и квадратурных Q отсчетов, имеющих соответствующую фазу относительно фронтов кодовых импульсов.
Принимающие устройства могут быть классифицированы, основываясь на количестве интегрирующих устройств, используемых принимающими устройствами для интегрирования отсчетов, которые классифицируются, основываясь на их местоположении относительно фронтов кодовых импульсов. Как правило, принимающие устройства получают почти точное целое число отсчетов за период кодового импульса. Каждому отсчету назначается номер отсчета, и принимающее устройство отдельно для каждого номера отсчета интегрирует соответствующие отсчеты, через множественные переходы. Например, если принимающее устройство получило четыре пары синфазных I и квадратурных Q отсчетов за период кодового импульса, то оно выполняет корреляцию положительной или отрицательной четверти импульса, нумеруя отсчеты от 1 до 4 относительно фронта кодового импульса и суммируя два подмножества отсчетов. Первое подмножество включает в себя только отсчет 4, тот, который имеет место точно перед фронтом кодового импульса. Второе подмножество включает в себя только отсчет 1, тот, который имеет место сразу после фронта кодового импульса.
Интервалы между интегральными отсчетами 1020 могут быть 5 нс или меньше. Если для создания таких подмножеств ограниченной дискретизации используется описанная выше технология дискретизации, то требуется частота комплексной дискретизации и обработки данных, по меньшей мере, 200 МГц. Такая высокая точность дискретизации очень дорогостояща в реализации по потребляемой мощности, стоимости деталей и трудности исполнения. Однако она действительно обеспечивает высокое отношение сигнал-шум, поскольку существует, по меньшей мере, один отсчет для каждого накопителя от каждого кодового перехода.
В некоторых вариантах осуществления может использоваться альтернативная технология для достижения тех же результатов с намного меньшей частотой отсчетов. В этих вариантах осуществления частота отсчета может быть уже 30 МГц, наименьшая скорость, предусмотренная условиями Найквиста. Эта технология использует частоту отсчетов, которая не является целым кратным частоты кодового импульса. Следовательно, привязка по времени отсчетов по отношению к кодовому переходу изменяется с каждым кодовым переходом. Обратимся к Фиг.8, в этих вариантах осуществления генератор 818 опорного сигнала преднамеренно смещен относительно частоты несущего сигнала от одного или более спутников, обычно на 40-100 миллионных долей (с наибольшей зависимостью от температуры генератора 818 опорного сигнала). Это соответствует 60-150 кГц для L1 (1 миллионная доля равна 1,57542 кГц на L1), и имитирует влияние остаточного доплеровского смещения в отсчетах от аналого-цифровых преобразователей 828 и 830. Это смещение гарантирует, что привязка по времени кодовых переходов будет мало изменяться по отношению к времени между последовательными отсчетами. Это гарантирует, что отсчеты кодовых переходов равномерно распределяются по множественным накопителям в канале за период времени.
Обратимся к Фиг.9, фаза суммирования 928 сдвига кода для опорного сигнала кодового сигнала используется для установления, какое интегрирующее устройство, такое как интегрирующее устройство 934, принимает отсчет для данного кодового перехода. Все, что требуется для обеспечения хорошо разнесенных отсчетов, это соответственно качественная проверка фазы опорного сигнала кодового сигнала. Поскольку временное разнесение отсчетами больше, чем временной интервал между каждым из накопителей, только часть накопителей назначается отсчету для каждого кодового перехода. В действительности, в некоторых вариантах осуществления только один накопитель назначается отсчету для каждого кодового перехода. Однако, на протяжении множества периодов кодовых импульсов, каждый накопитель принимает много отсчетов. Эта технология имеет относительный недостаток, касающийся отношения сигнал-шум, потому что только часть накопителей принимает отсчет для каждого кодового перехода. Тем не менее, поскольку время корреляции многолучевых сигналов, имеющих разность хода луча меньше 50 футов, очень большое, интегрирования могут быть продолжены на более длительные периоды для того, чтобы достичь требуемого отношения сигнал-шум. Времена интегрирования от 100 мс до нескольких секунд достаточны, и намного короче, чем время корреляции многолучевых сигналов, имеющих разность хода луча меньше 50 футов.
Если может наблюдаться точная форма траектории 710 (Фиг.7), влияние погрешности, вызванной многолучевым распространением, может быть установлено и устранено. Как показано на Фиг.6, многолучевая интерференция имеет несколько наблюдаемых влияний на комплексную реакцию 618 фильтра на скачок, включающих в себя увеличение амплитуды, увеличение характеристики времени реакции фильтра, такой как продолжительность времени реакции на скачок и временная погрешность 520 (Фиг.5) между началом обращения фазы и переходом через нуль.
Основным принципом системы и способа является то, что траектория 710 перехода (Фиг.7) и одна или более погрешностей, вызванных многолучевым распространением, могут быть смоделированы с помощью наблюдения отклонений между наблюдаемым составным сигналом, таким, как составной сигнал 314 (Фиг.3), и вычисленным прямым сигналом, используя заранее заданную характеристику фильтра, такую как реакция 516 фильтра на скачок (Фиг.5). В некоторых вариантах осуществления заранее заданная характеристика фильтра определяется при процедуре калибровки. В других вариантах осуществления процедура калибровки может повторяться, например, если есть изменение рабочей температуры. В некоторых вариантах осуществления заранее заданная характеристика фильтра может основываться на предполагаемом фильтре спутника или принимающего устройства. Заранее заданная характеристика фильтра не должна быть точной копией реальной характеристики фильтра. Скорее, она должна быть достаточно похожей, чтобы предоставить возможность существенного ослабления одной или более погрешностей, вызванных многолучевым распространением.
Необходимые наблюдения проиллюстрированы с помощью интегральных отсчетов 1020 на Фиг.10. Хотя Фиг.10 представляет наблюдения в виде размерных (действительных) отсчетов, отсчеты кодового перехода могут считаться двумерными (комплексными) отсчетами, предоставляющими и амплитуду, такую как амплитуда Ad+m 410 составного сигнала (Фиг.4A), и фазу (не показано) составного сигнала. Если форма кривой погрешностей может быть вычислена, амплитуда Am 216 (Фиг.2), фаза 220 (Фиг.2) и временная задержка многолучевого сигнала 116 (Фиг.1), соответствующие разности хода луча, могут быть определены и существенно скорректированы. Таким образом, фазовая погрешность 412_1 (Фиг.4A), вызванная многолучевым сигналом 116 (Фиг.1), может быть устойчиво оценена и фазовая погрешность, вызванная многолучевым распространением, может быть ослаблена. Далее описывается способ анализа сигналов (иногда в настоящем описании называемый алгоритмом), который оценивает фазовую погрешность 412_1 (Фиг.4A), основываясь на модели траектории 710 перехода (Фиг.7).
Этот способ анализа сигналов оценивает параметры, которые определяют траекторию 710 (Фиг.7), предоставляя возможность смоделировать траекторию 710 (Фиг.7). В описании алгоритма, который следует далее, используются два временных показателя. Показатель j представляет собой фактическое или итеративное время набора данных. Анализ сигналов повторяется всякий раз, когда создается полный и самостоятельный набор измерений (после циклов интегрирования по совокупности кодовых переходов). Время итерации выбирается так, чтобы оно было достаточно длительным для обеспечения отношения сигнал-шум, удовлетворительного для устойчивой оценки, и достаточно коротким, чтобы могли наблюдаться изменения в многолучевом сигнале 116 (Фиг.1). Как отмечалось выше, поскольку многолучевая интерференция с малой разностью хода луча, т.е. меньше 50 футов, медленно изменяется со временем, имеют место времена корреляции многолучевости продолжительностью примерно несколько сотен секунд, и характерны частоты итераций от 100 мс до нескольких секунд. Показатель k представляет собой временную задержку особой выборки данных в пределах набора данных, относящихся к времени t0 518 мгновенной реакции на скачок (Фиг.5), соответствующему идеальному кодовому переходу. Обратимся к Фиг.10, если k равно нулю, данные, выбранные слева от большей части интегральных отсчетов 1020, являются справочными, и соответствуют началу кодового перехода. Если k равно единице, выборка данных соответствует следующей точке направо, и так далее на протяжении реакции 1010 фильтра на скачок.
Способ анализа сигналов оценивает следующие параметры:
• амплитуду сигнала Ad 214 прямого пути (Фиг.2);
• амплитуду многолучевого сигнала Am 216 (Фиг.2);
• фазовую погрешность 412_1 (Фиг.4A);
• разность фаз 414_1 (Фиг.4A); и
• временную задержку .
Способ анализа сигналов использует следующие входные данные:
• заранее заданную реакцию SR(t) фильтра на скачок, где t является временем;
• амплитуду составного сигнала Ad+m 410 (Фиг.4A), измеренную при помощи системы отслеживания установившегося сигнала (не показано); и
• синфазные I(t) и квадратурные Q(t) измерения полосы частот передачи, сделанные в различные времена на протяжении кодовых переходов.
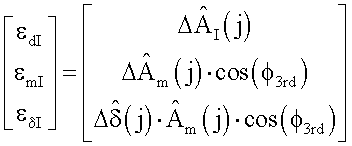
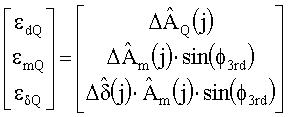
Для данного кодового перехода I(t) и Q(t) могут быть выражены как

где  является фазой
является фазой  416_1, заданной выражением
416_1, заданной выражением

Поскольку способ анализа сигналов оценивает ряд взаимосвязанных величин, он содержит две процедуры. Первая процедура оценивает фазу 416_1 (Фиг.4A) и временную погрешность 520 (Фиг.5). Заметим, что временная погрешность 520 (Фиг.5) также соответствует погрешности в восстановленной привязке по времени кода в принимающем устройстве. Способ анализа сигнала определяет выравнивание собственного времени кодового перехода и измеренного времени перехода, представленного привязкой по времени отсчетов I(t) и Q(t). Выравнивание собственного времени важно, так как вторая процедура ощутимо зависит от времени t0 518 (Фиг.5), соответствующего идеальной мгновенной реакции 514 на скачок (Фиг.5) и началу траектории 710 (Фиг.7). Вторая процедура оценивает остальные параметры. Ниже сначала описывается первая процедура алгоритма.
Траектория 710 перехода (Фиг.7) является графиком зависимости I(t) от Q(t) во время кодового перехода на сигнале 114 прямого пути (Фиг.1), опережающего по времени тот же кодовый переход запаздывающего многолучевого сигнала 116 (Фиг.1). Реакция фильтра на скачок, такая как реакция 1010 фильтра на скачок (Фиг.10), фильтра или на принимающем устройстве или на спутнике определяет конфигурацию этих кодовых переходов. Как показано на Фиг.5, кодовые переходы зависят от времени. Однако, как отмечено выше, заранее заданная реакция фильтра на скачок не должна быть точной копией реальной характеристики фильтра. Также заметим, что начальная оценка для времени t0 518, соответствующего идеальной мгновенной реакции фильтра на скачок, обеспечивается системой отслеживания кода (не показано). Оценка для временной погрешности 520, определенной в первой процедуре способа анализа сигналов, является точной оценкой любой остаточной погрешности отслеживания кода, вызванной многолучевым распространением, при начальной оценке для времени t0 518 и соответственно измерением псевдодальности. Следовательно, параметры, определяемые в этой технологии, могут использоваться для коррекции этой остаточной погрешности, вызванной многолучевым распространением, при навигационных расчетах псевдодальности так же как фазовой погрешности 412_1 (Фиг.4A).
Изменяя Уравнение 1, можно сгенерировать уравнение, которое позволяет выявлять временную погрешность 520. Введем обозначения

и

где время t0 518 является начальной оценкой, обеспеченной системой отслеживания кода, и время t1 522 является фактическим временем кодового перехода, включающим в себя влияние многолучевого сигнала 116 (Фиг.1). Использование I(t) и Q(t) из Уравнения 1 приводит к выражениям

Подстановка с учетом тригонометрического соотношения (из Фиг.4A)

дает в результате

Умножение x(t1) на
приводит к выражениям

Вычитание первого уравнения из второго и преобразование дает в результате

Обратимся к Фиг.4A, заметим, что

Подстановка этого соотношения в исходное уравнение приводит к выражению

Упрощение этого уравнения приводит к выражению

Дальнейшее упрощение дает в результате

Это выражение может быть представлено в другом виде

Для небольших значений временной погрешности 520 (равных времени t1 522 минус время t0 518),

Последнее уравнение для y(t) может быть перезаписано в матричной форме для n входящих I и Q отсчетов в каждом наборе данных, соответствующем до n накопителей в принимающем устройстве
Матричное Уравнение 3 может быть разрешено множеством способов, но самым простым является прием выравнивания методом наименьших квадратов. Результатами этого вычисления наименьших квадратов являются параметры прямой с наклоном  и отрезка, пропорционального временной погрешности 520. В первой процедуре. Уравнения 2 и 3 используются для формирования оценочной функции для временной погрешности 520, которая используется для итеративного обновления времени t0 518 до тех пор, пока время t0 518 не будет равно времени t1 522, и равно по существу нулю, т.е. y-отрезок линии равен нулю. Оценка наклона (slope) используется для формирования оценки фазы 416_1 (Фиг.4A). А именно, j-я оценка наклона обновляется согласно выражению
и отрезка, пропорционального временной погрешности 520. В первой процедуре. Уравнения 2 и 3 используются для формирования оценочной функции для временной погрешности 520, которая используется для итеративного обновления времени t0 518 до тех пор, пока время t0 518 не будет равно времени t1 522, и равно по существу нулю, т.е. y-отрезок линии равен нулю. Оценка наклона (slope) используется для формирования оценки фазы 416_1 (Фиг.4A). А именно, j-я оценка наклона обновляется согласно выражению

где k представляет собой обратный коэффициент петлевого усиления. Как правило, значения коэффициента петлевого усиления находятся между десятью и одной тысячью. Коэффициент петлевого усиления может изменяться, поскольку первая процедура сходится к решению. Соответствующим критерием сходимости является то, что изменение в оцененном наклоне во время итерации меньше 10-4. j-я оценка времени t0 518 (Фиг.5) равна
Оценка фазы 416_1 (Фиг.4A) задается выражением
Изначально оценка наклона выполняется независимо, чтобы предоставить оценку наклона для схождения перед обновлением времени t0 518. Когда время t0 518 становится равно времени t1 522, Уравнение 3 приводится к виду

Следовательно, когда решение матричного Уравнения 3 выдает нулевой отрезок, входные данные x и y Уравнения 2 огибают прямую с наклоном , так как набор данных определяется прямой Уравнения 4.
Фиг.12 является блок-схемой для первой процедуры 1200 в способе анализа сигналов. I(t) и Q(t) являются входными данными для этапа 1210. На этапе 1212 вычисляются x(t) и y(t), и определяются 1214 оценки для временной погрешности 520 и  Если наклон не сходится 1216, этапы повторяются. Если наклон сходится 1216, оценка для времени t0 518 обновляется 1218, фаза 416_1 (Фиг.4A) является результатом 1220, и этапы повторяются. Теперь описывается вторая процедура в способе анализа сигналов.
Если наклон не сходится 1216, этапы повторяются. Если наклон сходится 1216, оценка для времени t0 518 обновляется 1218, фаза 416_1 (Фиг.4A) является результатом 1220, и этапы повторяются. Теперь описывается вторая процедура в способе анализа сигналов.
После установления правильной привязки по времени и получения начальной оценки фазы 416_1 (Фиг.4A) оцениваются остальные параметры, описывающие траекторию 710 перехода (Фиг.7). Способ анализа сигналов сначала оценивает I-составляющие параметров, а затем Q-составляющие параметров. В альтернативных вариантах осуществления способ анализа сигналов может сначала оценивать Q-составляющие параметров, а затем I-составляющие параметров. В других дополнительных вариантах осуществления I-составляющие параметров и Q-составляющие параметров могут оцениваться одновременно. Амплитуда сигнала Ad 214 прямого пути (Фиг.2) оценивается по двум составляющим  и
и  Амплитуда многолучевого сигнала Am 216 (Фиг.2), оценивается по двум составляющим
Амплитуда многолучевого сигнала Am 216 (Фиг.2), оценивается по двум составляющим  и
и  использующим оценку фазы 416_1 (Фиг.4A) из первой процедуры. Временная задержка оценивается отдельно, используя разложение в ряд Тейлора, которое формирует член, линейный относительно .
использующим оценку фазы 416_1 (Фиг.4A) из первой процедуры. Временная задержка оценивается отдельно, используя разложение в ряд Тейлора, которое формирует член, линейный относительно .
Во второй процедуре оцениваются величины

Представление Уравнения 1 в другом виде, исходя из оцененных величин, приводит к выражениям

где нижний индекс jk указывает k-ю выборку данных на итерации j. Затем формируются уравнения для измерений, путем получения разности между оцененными I(t) и Q(t) и выборками данных I и Q от принимающего устройства

Разложение в ряд Тейлора оценки временной задержки используется, чтобы линеаризовать эти уравнения. Обозначение
и использование только нижних индексов времени (итерация набора данных является j-й, а выборка в пределах итерации набора данных является k-й), и отбрасывание обозначения t приводит к выражениям

Разложения в ряд Тейлора могут быть перезаписаны в матричной форме для входного I и Q дискретизированного набора данных в виде
 (5a)
(5a)
и
 (5b)
(5b)
Затем уравнения 5a и 5b решаются по отдельности. Эти матричные уравнения могут быть разрешены множеством способов, но самым простым является прием выравнивания методом наименьших квадратов. Если матрица является переопределенной, то прием выравнивания методом наименьших квадратов определяет псевдообратную матрицу. Решениями уравнений 5a и 5b являются оценки двух векторов погрешностей
и
Оценки составляющих траектории перехода обновляются, используя эти оценки погрешностей согласно выражениям
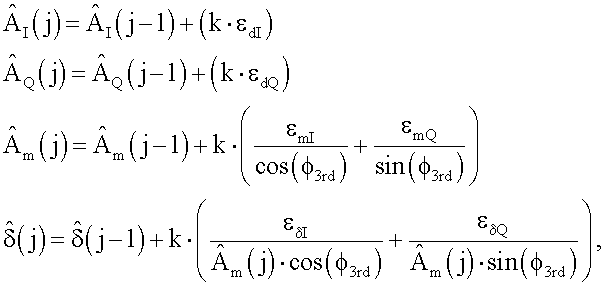
где k является обратной величиной к коэффициенту петлевого усиления. Как правило, значения коэффициента петлевого усиления находятся между 10 и 1000. Коэффициент петлевого усиления может изменяться, поскольку вторая процедура сходится к решению. Заметим, что в некоторых вариантах осуществления значение k в одном или более упомянутых уравнениях может отличаться от значения или значений k в других уравнениях.
Фиг.13 является блок-схемой для второй процедуры 1300 в способе анализа сигналов. На этапе 1310 инициализируются оценки AI, AQ, амплитуда многолучевого сигнала Am 216 (Фиг.2) и временная задержка . Определяются оценки для I(t) и Q(t) 1312. Подаются на вход измеренные I(t) и Q(t) 1314. Вычисляются x и y для отсчетов I, и y для отсчетов Q 1316. Вычисляются  и
и  1318. Вычисляются
1318. Вычисляются  и
и  1320. Обновляются оценки для AI, AQ, амплитуда многолучевого сигнала Am 216 (Фиг.2) и временная задержка 1322. Затем этапы повторяются, пока вторая процедура не сойдется 1300. Соответствующим критерием сходимости является то, что изменение в оцененных параметрах во время итерации меньше 10-4. Затем оцениваются остальные параметры 1324.
1320. Обновляются оценки для AI, AQ, амплитуда многолучевого сигнала Am 216 (Фиг.2) и временная задержка 1322. Затем этапы повторяются, пока вторая процедура не сойдется 1300. Соответствующим критерием сходимости является то, что изменение в оцененных параметрах во время итерации меньше 10-4. Затем оцениваются остальные параметры 1324.
Из величин, вычисленных в первой процедуре и во второй процедуре, могут быть определены оценки для всех параметров, которые описывают траекторию 710 перехода (Фиг.7). Первая процедура предоставляет временную погрешность 520 и фазу 416_1 (Фиг.4A). Оценки для временной задержки и амплитуды многолучевого сигнала Am 216 (Фиг.2) определяются во второй процедуре. Оценки для остальных параметров могут быть определены из этих параметров. В частности
Оценка для фазовой погрешности 412_1 (Фиг.4A) позволяет корректировать погрешность, вызванную многолучевым распространением, связанную с этим параметром, при навигационных расчетах. Навигационные расчеты могут включать в себя определение местоположения, какие-либо производные местоположения и/или комбинации местоположения и одной или более производных местоположения. Моделирования варианта осуществления способа анализа сигналов показывают его эффективность устранения вплоть до 95% погрешности, вызванной многолучевым распространением, для разностей хода луча всего 1 м.
Иллюстрации и иллюстративные варианты осуществления системы и способа для ослабления одной или более погрешностей, вызванных многолучевым распространением, для одного или более многолучевых сигналов.
Если присутствует более чем один многолучевой сигнал, то оцененные параметры будут соответствовать векторной сумме многолучевых сигналов. Система и способ также могут использоваться для множества фильтров принимающих устройств или спутников, если характеристики фильтра для этих фильтров известны. Если фильтры имеют достаточно схожие характеристики фильтра, в некоторых вариантах осуществления для реализации системы и способа может использоваться средняя характеристика фильтра.
Несмотря на то что описанные выше система и способ также применимы для ослабления одной или более погрешностей, вызванных многолучевым распространением, для разностей хода луча больше 50 футов, существуют некоторые дополнительные проблемы, связанные с такими многолучевыми сигналами. В частности, такие многолучевые сигналы обладают более коротким временем корреляции. Это те варианты осуществления, которые используют более низкую частоту дискретизации и интегрируют по времени для получения достаточного отношения сигнал-шум, что может быть проблематично. В этих вариантах осуществления система и способ могут использоваться совместно с другими технологиями ослабления погрешностей, вызванных многолучевым распространением, такими как коррекция с двойной дельтой, стробирующий коррелятор и коррелятор апертуры импульсов. Технология коррекции с двойной дельтой и другие технологии ослабления погрешности, вызванной многолучевым распространением, хорошо подходят для использования совместно с этими системой и способом. В частности, система и способ, описанные выше, ослабляют фазовые погрешности, связанные с многолучевыми сигналами, которые не устраняются этими другими технологиями ослабления погрешности, вызванной многолучевым распространением, а также оценивать остаточные погрешности псевдодальности, вызванные многолучевым распространением. Кроме того, эти другие технологии ослабления погрешности, вызванной многолучевым распространением, и система и способ, описанные выше, не создают помех друг другу.
Система и способ могут применяться для ослабления погрешности, вызванной многолучевым распространением, при синхронизации восстановления на принимающем устройстве CA-кода, например погрешности псевдодальности. В частности, временная погрешность 520 (Фиг.5) может быть определена без определения фазовой погрешности 412_1 (Фиг.4A), реализуя только первую процедуру в способе анализа сигналов. В таких вариантах осуществления соответствующая ширина полосы пропускания фильтра равна приблизительно 10 МГц, и время реакции фильтра на скачок должно быть существенно меньше 1 мкс, периода импульса CA-кода.
Система и способ для ослабления фазовой погрешности, связанной с многолучевыми сигналами малой дальности, могут быть реализованы во множестве конфигураций. Грань между аналоговой обработкой, цифровой обработкой сигналов посредством аппаратных средств и программного обеспечения условна, и существенно меняется от принимающего устройства к принимающему устройству. Часто большая часть обработки сигналов в принимающих устройствах реализуется в СИС. Другие конфигурации используют комбинацию СИС и программного обеспечения, исполняемого одним или более обрабатывающими устройствами. Общим направлением является реализация все больше принимающих устройств посредством программного обеспечения. Некоторые принимающие устройства, в том числе те, которые не работают в реальном времени, реализованы полностью в программном обеспечении. Кроме того, в некоторых принимающих устройствах вся обработка сигналов реализована с применением аналоговой схемы.
В некоторых вариантах осуществления системы этапы, выполняемые на шкале времени 33 нс (30 МГц) или меньше, реализуются с использованием аналоговой схемы. Этапы, выполняемые на шкале времени между 33 нс и 1 мс, реализуются с использованием СИС. Остальные этапы, такие как интегрирований в накопителях, на более длинных шкалах времени, реализуются с использованием программного обеспечения, выполняемого одним или более обрабатывающими устройствами, такими как микропроцессор.
Фиг.11 иллюстрирует вариант осуществления устройства 1110 в глобальной навигационной спутниковой системе (ГНСС) для ослабления одной или более погрешностей, вызванных многолучевым распространением. Устройство 1110 включает в себя:
• схему 1112 внешней электронной аппаратуры, такую как схему 800 внешней электронной аппаратуры (Фиг.8);
• устройство 1114 обработки сигналов, такое, как сигнальный процессор 900 (Фиг.9);
• процессор 1116;
• запоминающее устройство 1118, которое может включать в себя быстродействующее оперативное запоминающее устройство, а также может включать в себя энергонезависимое запоминающее устройство, такое как одно или более запоминающих устройств на магнитных дисках, ЭСППЗУ и/или флэш-ППЗУ, причем запоминающее устройство дополнительно включает в себя:
• операционную систему 1120;
• одну или более характеристик 1122 фильтра; и
• по меньшей мере, один программный модуль 1124, исполняемый процессором 1116, по меньшей мере, один программный модуль 1124, включающий в себя инструкции для синхронизации 1126 несущей и кода, другой дополнительной коррекции 1128 в условиях многолучевости (например, коррекция с двойной дельтой, стробирующий коррелятор и коррелятор апертуры импульсов), расчетов 1130 в условиях многолучевого распространения, включающих в себя первую процедуру и вторую процедуру, описанные выше, и коррекции 1132 фазовой погрешности 412_1 (Фиг.4A) или псевдодальности в условиях многолучевого распространения.
В некоторых вариантах осуществления может быть более одного обрабатывающего устройства 1116. Как отмечено выше, в других вариантах осуществления устройство 1110 может включать в себя СИС, и некоторые или все функции, по меньшей мере, одного программного модуля 1124, исполняемого процессором 1116, могут быть реализованы в СИС.
В предшествующем описании, в иллюстративных целях, использована специфическая номенклатура, чтобы обеспечить всестороннее понимание настоящего изобретения. Тем не менее специалисту в данной области техники будет очевидно, что отдельные детали не являются необходимыми для практического использования настоящего изобретения. Варианты осуществления были выбраны и описаны для того, чтобы наилучшим образом раскрыть принципы настоящего изобретения и его практического применения, чтобы тем самым позволить другим специалистам в данной области техники наилучшим образом использовать настоящее изобретение и различные варианты осуществления с различными модификациями, которые подходят для конкретного предполагаемого использования. Таким образом, предшествующее раскрытие предмета настоящего изобретения не должно пониматься как исчерпывающее или ограничивающее настоящее изобретение отдельно взятыми раскрытыми образцами. Ввиду вышеизложенных идей допустимы многие модификации и изменения.
Предполагается, что объем настоящего изобретения определен следующей формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ПРИ ОПРЕДЕЛЕНИИ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ СУДНА В УСЛОВИЯХ НАРУШЕНИЯ СТРУКТУРЫ ПРИНИМАЕМЫХ СИГНАЛОВ ГНСС СУДОВОЙ ИНФРАСТРУКТУРОЙ | 2016 |
|
RU2661336C2 |
| Высокочувствительный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2017 |
|
RU2656998C1 |
| ОБОРУДОВАНИЕ ДЛЯ ОБРАБОТКИ СИГНАЛОВ AltBOC СО СПУТНИКОВ "ГАЛИЛЕО" | 2003 |
|
RU2339051C2 |
| АРХИТЕКТУРА ОБРАБОТКИ СИГНАЛОВ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2417382C2 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| ВЫБОР ПОРОГОВОГО ЗНАЧЕНИЯ И УСИЛЕНИЯ ДЛЯ СПУТНИКОВОГО НАВИГАЦИОННОГО ПРИЕМНИКА | 2006 |
|
RU2417381C2 |
| ОЦЕНКА ОШИБОК И ЦЕЛОСТНОСТИ ПОСРЕДСТВОМ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕЩЕНИЯ | 2020 |
|
RU2789700C1 |
| ЗАВИСЯЩЕЕ ОТ РАССТОЯНИЯ УМЕНЬШЕНИЕ ОШИБКИ ПРИ ОПРЕДЕЛЕНИИ МЕСТОПОЛОЖЕНИЯ В РЕЖИМЕ КИНЕМАТИКИ РЕАЛЬНОГО ВРЕМЕНИ | 2008 |
|
RU2479855C2 |
Заявлены система и способ для ослабления погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе. При осуществлении способа принимается составной сигнал. Составной сигнал включает в себя сигнал прямого пути с ограниченной полосой пропускания и, по меньшей мере, один многолучевой сигнал с ограниченной полосой пропускания, каждый из которых модулируется с периодическими обращениями фазы. Составной сигнал измеряется в зависимости от времени на протяжении временного интервала, содержащего, по меньшей мере, одно из периодических обращений фазы. Обусловленная многолучевым сигналом фазовая погрешность между составным сигналом и сигналом прямого пути определяется, используя измеренный составной сигнал в зависимости от времени и заранее заданную характеристику фильтра, соответствующую фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала. Фазовая погрешность корректируется при навигационных расчетах. Достигаемым техническим результатом является ослабление погрешности, вызванной фазовой многолучевостью. 2 н. и 35 з.п. ф-лы, 15 ил.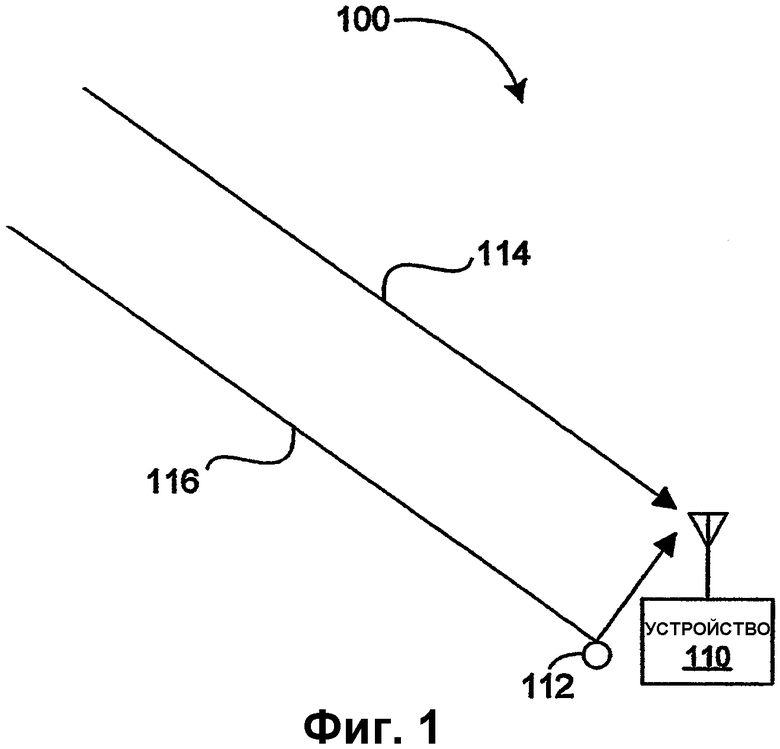
1. Способ ослабления влияния погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе (ГНСС), причем способ содержит этапы, на которых
принимают составной сигнал, включающий в себя сигнал прямого пути с ограниченной полосой пропускания и, по меньшей мере, один многолучевой сигнал с ограниченной полосой пропускания, причем сигнал прямого пути и многолучевой сигнал модулируются с периодическими обращениями фазы;
измеряют составной сигнал в зависимости от времени на протяжении временного интервала, содержащего, по меньшей мере, одно из периодических обращений фазы;
определяют обусловленную многолучевым сигналом фазовую погрешность между составным сигналом и сигналом прямого пути, согласно измеренному составному сигналу в зависимости от времени и заранее заданной характеристике фильтра одного или более фильтров в ГНСС, которые используются для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала, причем заранее заданная характеристика фильтра ассоциирована с временем реакции фильтра; и корректируют фазовую погрешность.
2. Способ по п.1, который дополнительно содержит этап, на котором определяют временную погрешность Δt, причем временная погрешность Δt соответствует разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и корректируют погрешность в псевдодальности, соответствующей временной погрешности Δt.
3. Способ по п.1, в котором этап, на котором измеряют составной сигнал, дополнительно содержит этап, на котором измеряют синфазную I и квадратурную Q составляющие составного сигнала.
4. Способ по п.1, в котором характеристика фильтра выбирается из следующей группы: реакция фильтра на скачок, реакция фильтра на импульс и комплексная передаточная функция фильтра.
5. Способ по п.1, в котором сигнал прямого пути и многолучевой сигнал включают в себя сигнал несущей частоты L-диапазона системы глобального позиционирования.
6. Способ по п.1, в котором сигнал прямого пути и многолучевой сигнал кодируются с использованием широкополосного кода с псевдослучайным шумом.
7. Способ по п.1, в котором глобальная навигационная спутниковая система (ГНСС) выбирается из следующей группы: система глобального позиционирования (GPS - Global Positioning System), Глобальная Навигационная Спутниковая Система (ГЛОНАСС), система позиционирования GALILEO, Европейская Геостационарная Дополнительная Навигационная Система (EGNOS - European Geostationary Navigation Overlay System), Широкозонная Усиливающая Система (WAAS - Wide Area Augmentation System), Многофункциональная Транспортная Спутниковая Усиливающая Система (MSAS - Multifunctional Transport Satellite-Based Augmentation System) и Квазизенитная Спутниковая Система (QZSS - Quasi-Zenith Satellite System).
8. Способ по п.1, в котором определение фазовой погрешности содержит определение фазовой погрешности, ассоциированной с временной задержкой многолучевого сигнала относительно сигнала прямого пути, причем временная задержка является существенно меньшей, чем время реакции фильтра на скачок, соответствующее одному или более фильтрам, используемым для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала.
9. Способ по п.8, в котором время реакции фильтра на скачок для одного или более фильтров меньше или равно 200 нс.
10. Способ по п.8, в котором время реакции фильтра на скачок для одного или более фильтров меньше или равно 1 мкс.
11. Способ по п.8, в котором время реакции фильтра на скачок для одного или более фильтров находится между 40 и 200 нс.
12. Способ по п.1, который дополнительно содержит этап, на котором ослабляют погрешность, вызванную многолучевым распространением, используя технологию, выбранную из следующей группы: коррекция с двойной дельтой, стробирующий коррелятор и импульс-апертурный коррелятор.
13. Способ по п.1, который дополнительно содержит этап, на котором определяют амплитуду сигнала прямого пути, амплитуду многолучевого сигнала, разность фаз φm между сигналом прямого пути и многолучевым сигналом, и временную задержку δ многолучевого сигнала относительно сигнала прямого пути в соответствии с реакцией фильтра на скачок, измеренной амплитудой составного сигнала и измеренным составным сигналом в зависимости от времени.
14. Способ по п.1, который дополнительно содержит этап, на котором определяют разность фаз φm между сигналом прямого пути и многолучевым сигналом в соответствии с реакцией фильтра на скачок, измеренной амплитудой составного сигнала и измеренным составным сигналом в зависимости от времени.
15. Способ по п.1, в котором первая процедура определяет первый набор параметров, включающий в себя временную погрешность Δt, причем временная погрешность Δt соответствует разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и фазу φ3rd, равную 180° минус сумма фазовой погрешности φε и разности фаз φm между сигналом прямого пути и многолучевым сигналом.
16. Способ по п.15, в котором первый набор параметров определяют, используя прием выравнивания методом наименьших квадратов.
17. Способ по п.15, в котором вторая процедура определяет второй набор параметров, включающий в себя амплитуду сигнала прямого пути, амплитуду многолучевого сигнала и фазовую погрешность φε, из которых может быть определена разность фаз φm, используя фазу φ3rd.
18. Способ по п.17, в котором второй набор параметров определяют с помощью приема выравнивания методом наименьших квадратов.
19. Устройство, которое ослабляет влияние погрешности, вызванной многолучевым распространением, в глобальной навигационной спутниковой системе (ГНСС), при этом устройство содержит
принимающее устройство, которое принимает составной сигнал, включающий в себя сигнал прямого пути с ограниченной полосой пропускания и, по меньшей мере, один многолучевой сигнал с ограниченной полосой пропускания, причем сигнал прямого пути и многолучевой сигнал модулируются с периодическими обращениями фазы;
измерительный механизм, который осуществляет дискретизацию составного сигнала в зависимости от времени на протяжении временного интервала, содержащего, по меньшей мере, одно из периодических обращений фазы;
процессор;
память, включающую в себя, по меньшей мере, один программный модуль, который исполняется процессором, причем, по меньшей мере, один программный модуль содержит инструкции для определения обусловленной многолучевым сигналом фазовой погрешности φε между составным сигналом и сигналом прямого пути, согласно измеренному составному сигналу в зависимости от времени и заранее заданной характеристики фильтра одного или более фильтров в ГНСС, которые используются для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала, причем заранее заданная характеристика фильтра ассоциирована с временем реакции фильтра;
причем устройство выполнено с возможностью коррекции фазовой погрешности φε.
20. Устройство по п.19, в котором измерительный механизм осуществляет дискретизацию составного сигнала, когда устройство синхронизируется с сигналом несущей частоты и кодовым сигналом.
21. Устройство по п.19, в котором, по меньшей мере, один программный модуль дополнительно содержит инструкции для определения временной погрешности Δt, причем временная погрешность Δt соответствует разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и коррекции погрешности в псевдодальности, соответствующей временной погрешности Δt.
22. Устройство по п.19, в котором измерительный механизм измеряет синфазную I и квадратурную Q составляющие составного сигнала.
23. Устройство по п.19, в котором характеристика фильтра выбирается из следующей группы: реакция фильтра на скачок, реакция фильтра на импульс и комплексная передаточная функция фильтра.
24. Устройство по п.19, в котором сигнал прямого пути и многолучевой сигнал включают в себя сигнал несущей частоты L-диапазона системы глобального позиционирования.
25. Устройство по п.19, в котором код содержит широкополосный код с псевдослучайным шумом.
26. Устройство по п.19, в котором глобальная навигационная спутниковая система (ГНСС) выбирается из следующей группы: система глобального позиционирования (GPS - Global Positioning System), Глобальная Навигационная Спутниковая Система (ГЛОНАСС), система позиционирования GALILEO, Европейская Геостационарная Дополнительная Навигационная Система (EGNOS - European Geostationary Navigation Overlay System), Широкозонная Усиливающая Система (WAAS - Wide Area Augmentation System), Многофункциональная Транспортная Спутниковая Усиливающая Система (MSAS - Multifunctional Transport Satellite-Based Augmentation System) и Квазизенитная Спутниковая Система (QZSS - Quasi-Zenith Satellite System).
27. Устройство по п.19, в котором определенная фазовая погрешность соответствует временной задержке δ многолучевого сигнала относительно сигнала прямого пути, которая является существенно меньшей, чем время реакции фильтра на скачок, соответствующее фильтру, использующемуся для ограничения полосы пропускания сигнала прямого пути и многолучевого сигнала.
28. Устройство по п.27, в котором время реакции фильтра на скачок для одного или более фильтров меньше или равно 200 нс.
29. Устройство по п.27, в котором время реакции фильтра на скачок для одного или более фильтров меньше или равно 1 мкс.
30. Устройство по п.27, в котором время реакции фильтра на скачок для одного или более фильтров находится между 40 и 200 нс.
31. Устройство по п.19, в котором, по меньшей мере, один программный модуль дополнительно содержит инструкции для ослабления погрешности, вызванной многолучевым распространением, с использованием технологии, выбранной из следующей группы: коррекция с двойной дельтой, стробирующий коррелятор и импульс-апертурный коррелятор.
32. Устройство по п.19, в котором, по меньшей мере, один программный модуль дополнительно содержит инструкции для определения амплитуды сигнала прямого пути, амплитуды многолучевого сигнала, разности фаз φm между сигналом прямого пути и многолучевым сигналом, временной задержки δ многолучевого сигнала относительно сигнала прямого пути в соответствии с реакцией фильтра на скачок для одного или более фильтров измеренной амплитудой составного сигнала и измеренным составным сигналом в зависимости от времени.
33. Устройство по п.19, в котором, по меньшей мере, один программный модуль дополнительно содержит инструкции для определения разности фаз φm между сигналом прямого пути и многолучевым сигналом в соответствии с реакцией фильтра на скачок, измеренной амплитудой составного сигнала и измеренным составным сигналом в зависимости от времени.
34. Устройство по п.19, в котором, по меньшей мере, один программный модуль дополнительно содержит инструкции для первой процедуры, которая определяет первый набор параметров, включающий в себя временную погрешность Δt, причем временная погрешность Δt соответствует разности между фактическим временем обращения фазы, включающим в себя влияние многолучевого сигнала, и временем обращения фазы без влияния многолучевого сигнала, и фазу φ3rd, равную 180° минус сумма фазовой погрешности φε и разности фаз φm между сигналом прямого пути и многолучевым сигналом.
35. Устройство по п.34, в котором первый набор параметров определяется, используя прием выравнивания методом наименьших квадратов.
36. Устройство по п.34, в котором, по меньшей мере, один программный модуль дополнительно содержит инструкции для второй процедуры, которая определяет второй набор параметров, включающий в себя амплитуду сигнала прямого пути, амплитуду многолучевого сигнала и фазовую погрешность φε, из которых может быть определена разность фаз φm, используя фазу φ3rd.
37. Устройство по п.36, в котором второй набор параметров определяется с помощью приема выравнивания методом наименьших квадратов.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ ИСКЛЮЧЕНИЯ ВЛИЯНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ В ПРИЕМНИКЕ ДЛЯ ПРИЕМА СИГНАЛОВ МЕСТОПОЛОЖЕНИЯ ОТ СПУТНИКА И ПРИЕМНИК ДЛЯ ПРИЕМА СИГНАЛОВ МЕСТОПОЛОЖЕНИЯ ОТ СПУТНИКА | 1996 |
|
RU2178953C2 |
| УСОВЕРШЕНСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ИЛИ СВЯЗИ | 1997 |
|
RU2199803C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ДАЛЬНОСТИ И ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ НАВИГИРУЮЩИМСЯ ОБЪЕКТОМ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152048C1 |
| US 6587692 B1, 01.07.2003 | |||
| US 5347536 A, 13.09.1994. | |||

