Изобретение относится к судовой технике, а именно к тем судовым спускоподъемным устройствам (СПУ), которые выполняют операции спуска и подъема подводных объектов (ПО), преимущественно подводных зарядных станций (ПЗС), предназначенных для зарядки под водой электрических аккумуляторных батарей, установленных на автономных необитаемых подводных аппаратах (АНПА).
Известно спускоподъемное устройство, содержащее установленную на судне подъемную лебедку с устройством управления приводом этой лебедки, трос, один конец которого заведен на барабан подъемной лебедки, а другой прикреплен к подводному объекту, а также задатчик и измеритель скорости троса, акселерометр, подвешенный к оси грузового блока лебедки, и интегрирующий фильтр. Входы устройства управления приводом подъемной лебедки подключены к выходам задатчика и измерителя скорости троса, а также к выходу интегрирующего фильтра, вход которого соединен с выходом акселерометра (United States Patent Application Publication, Pub. No.: 2005/0242332. / Shuji Ueki, Hirohumi Doi, Shogo Miyajima, Kenzo Hasegava, Hiroshi Satoh. Pub. Date: Jul. 2, 2009. ([0007] - [0009], Fig. 4 - аналог)). При отсутствии качки судна устройство управления воздействует на привод лебедки по принципу отрицательной обратной связи так, чтобы разность выходных сигналов задатчика и измерителя скорости троса равнялась нулю. При этом скорость, с которой трос уходит в воду, равна заданной скорости. При наличии качки акселерометр измеряет вертикальную составляющую ускорения качки оси грузового блока лебедки, а выходной сигнал интегрирующего фильтра пропорционален вертикальной составляющей скорости качки оси грузового блока лебедки. Этот сигнал вычитается из задающего сигнала. Поэтому скорость перемещения троса, относительно судна, равна разности скоростей: заданной и качки, а по отношению к невзволнованной поверхности воды скорость троса практически равна заданной скорости. Тем самым происходит компенсация влияния качки судна на скорость перемещения подводного объекта при вертикальном направлении схода троса с грузового блока под воду.
У этого известного устройства имеются следующие недостатки. Во-первых, компенсация скорости, с которой перемещается ось грузового блока лебедки при качке судна, является неполной, когда судно находится в дрейфе, или на подводный объект действует течение. По этим причинам направление схода троса с грузового блока под воду отличается от вертикали.
Во-вторых, подвешенный акселерометр раскачивается под действием других, кроме вертикальной, видов качки. При этом возникают две дополнительные погрешности измерения ускорения. Первая из них вызвана отклонением оси акселерометра от вертикали. Вторая погрешность связана с тем, что акселерометр, подвешенный к оси грузового блока лебедки, измеряет не только ускорение качки, но и центробежное ускорение, вызванное его качанием вокруг оси подвеса.
Третий недостаток заключается в том, что в процессе компенсации влияния качки судна-носителя при малой или нулевой заданной скорости происходит непрерывное сматывание-наматывание троса на барабан лебедки. Такое движение троса сопровождается его изгибными деформациями при прохождении блоков лебедки. Медные жилы кабель-троса допускают всего 1000-2000 изгибов при прохождении через блоки. Этот ресурс может быть израсходован за несколько часов непрерывной работы лебедки. Поэтому аналог можно использовать только в том случае, когда судно и подводный объект связаны не кабель-тросом, а простым тросом (канатом), что исключает возможность передачи электроэнергии на подводный объект, например на подводную зарядную станцию.
Четвертый недостаток - это неспособность аналога удерживать подводный объект на постоянной глубине в автоматическом режиме. Глубина 3 погружения подводного объекта определяется средним по времени значением длины троса, смотанного с барабана лебедки. Как глубина погружения, так и длина троса в системе автоматического управления аналога являются ненаблюдаемыми величинами. Поэтому даже при заданном с задатчика нулевом значении скорости троса и идеальной работе акселерометра и интегрирующего фильтра глубина погружения подводного объекта будет непрерывно изменяться. Одним из факторов такого поведения системы автоматического управления скоростью лебедки является вес троса. При подъеме грузового блока под действием качки судна длина участка троса, находящегося между грузовым блоком и подводным объектом, под действием сигнала интегрирующего фильтра увеличится. Появится дополнительное усилие в тросе, вызванное приращением веса указанной части троса. Это усилие будет препятствовать полному возвращению смотанного участка троса обратно на барабан лебедки во время опускания грузового блока. Без вмешательства оператора с барабана лебедки постепенно сойдет весь трос, и подводный объект окажется на максимальной глубине.
Наиболее близким по технической сущности к заявленному устройству является выбранное в качестве прототипа спускоподъемное устройство, которое лишено указанных недостатков аналога (Патент RU 2445230 С2. Спускоподъемное устройство / Кувшинов Г.Е., Наумов Л.А., Чупина К.В., Радченко Д.В., Чепурин П.И. - Опубликовано 20.03.2012, Бюл. №8).
Оно содержит установленную на судне подъемную лебедку, гибкий тяговый орган подъемной лебедки, который связывает барабан этой лебедки с подводным объектом, снабженное приводом компенсаторное устройство, у подвижного элемента которого ось наклона расположена в плоскости, параллельной плоскости ватерлинии судна. Эта ось плотно соединена с подвижным элементом и установлена на подшипниках, закрепленных в установленной на судне опоре компенсаторного устройства. С указанным подвижным элементом связаны направляющий и грузовой блоки подъемной лебедки. Эти блоки огибает гибкий тяговый орган подъемной лебедки. Подшипник направляющего блока насажен на ось наклона указанного подвижного элемента, а первый грузовой блок прикреплен к тому, переднему, концу этого подвижного элемента, который находится над подводным объектом. В спуско-подъемное устройство входят также акселерометр, прикрепленный к опоре компенсаторного устройства так, что направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна, первый и второй интегрирующие фильтры, первый и второй командные блоки, первый и второй управляющие блоки, компаратор, измерительные преобразователи перемещения и скорости перемещения указанного подвижного элемента относительно опоры компенсаторного устройства.
Вход первого управляющего блока подключен к первому командному блоку, а выход - к управляющему входу двигательного устройства привода подъемной лебедки. Первый и второй выходы второго управляющего блока подключены соответственно к первому и второму управляющим входам привода компенсаторного устройства. К семи входам второго управляющего блока подключены соответственно следующие выходы: к первому входу второго управляющего блока - выход второго командного блока, ко второму входу - выход акселерометра, к третьему входу - выход первого интегрирующего фильтра, к четвертому входу - выход второго интегрирующего фильтра, к пятому и шестому входам - соответственно выходы измерительных преобразователей наклона и скорости наклона указанного подвижного элемента относительно опоры компенсаторного устройства, к седьмому входу - выход компаратора. Первый, второй и третий входы компаратора подключены соответственно к выходам второго командного блока, упомянутого измерительного преобразователя перемещения и второго интегрирующего фильтра, вход которого подключен к выходу первого интегрирующего фильтра, у которого вход подключен к выходу акселерометра.
Привод компенсаторного устройства выполняет функцию системы автоматического управления тем приложенным к подвижному элементу компенсаторного устройства моментом, который создает двигательное устройство этого привода, при этом указанная система выполняет управление по следующим видам возмущения: по качке судна, скорости и ускорению этой качки.
У прототипа гибким тяговым органом является кабель-трос, а подвижным элементом компенсаторного устройства - подъемно-опускная стрела. Опорой компенсаторного устройства служит установленная на судне колонна. (Направляющий и грузовой блоки, связанные с подвижным элементом компенсаторного устройства, в прототипе названы соответственно дополнительным и головным блоками подъемно-опускной стрелы.)
Благодаря тому, что направляющий блок может свободно проворачиваться относительно оси вращения подъемно-опускной стрелы, достигается постоянство длины участка троса от барабана подъемной лебедки до точки схода кабель-троса с головного блока при изменении угла наклона стрелы по отношению к корпусу судна. Тем самым повышается точность компенсации влияния качки судна на глубину погружения подводного объекта.
Основное перемещение подводного объекта (опускание на поверхность воды, выход на заданную глубину погружения, подъем на судно) осуществляют путем сматывания или наматывания кабель-троса на барабан подъемной лебедки под действием двигательного устройства со скоростью, заданной первым командным блоком.
Система автоматического управления приложенным к подвижному элементу компенсаторного устройства моментом, который создает двигательное устройство этого привода, благодаря наличию обратной связи по положению подъемно-опускной стрелы, поддерживает скорость головного блока стрелы, относительно плоскости ватерлинии, равной и противоположной по направлению скорости перемещения оси стрелы относительно той же плоскости. В результате скорость оси грузового блока относительно невзволнованной поверхности воды (или морского дна) практически равна нулю. Благодаря наличию сигналов от акселерометра и интегрирующих фильтров осуществляется управление приводом подъемно-опускной стрелы по возмущению - по значениям вызванных качкой судна перемещения, а также скорости и ускорения оси подъемно-опускной стрелы. Тем самым компенсируется влияние инерционных свойств элементов указанного привода, а также сил трения в его механической части.
При остановленной подъемной лебедке и наличии перемещений стрелы, которые компенсируют влияние качки судна, обеспечивается стабилизация глубины погружения подводного объекта. При этом грузовой и направляющий блоки стрелы практически не вращаются, а изгибные деформации кабель-троса незначительны и мало влияют на износ кабель-троса, что выгодно отличает предлагаемое устройство от его аналогов.
Прототипу присущи три основных недостатка.
1. Гибкий тяговый орган подъемной лебедки имеет одну ветвь, соединяющую подводный объект с механизмом лебедки. При подводном положении этого объекта возможно появление крутильных колебаний в системе трос - подводный объект, которые сопровождаются поворотами подводного объекта в горизонтальной плоскости. В том случае, когда подводным объектом является подводная зарядная станция, крутильные колебания затрудняют процессы входа автономного необитаемого подводного аппарата внутрь подводной зарядной станции и выхода из нее.
2. В качестве гибкого тягового органа подъемной лебедки использован не трос, а кабель-трос, который значительно тяжелее, толще и дороже троса, а долговечность (ресурс наработки на отказ) кабель-троса ниже, чем у троса. Кроме того, допустимый радиус изгиба кабель-троса значительно больше, чем у троса при той же грузоподъемности, что требует применения у подъемной лебедки блоков большего диаметра. Спуск подводной зарядной станции производится на небольшую глубину, при которой выгоднее использовать не кабель-трос, а два изделия: кабель для передачи электроэнергии и трос для спуска подводной зарядной станции. При таких малых длинах кабеля он не порвется под действием своего веса.
3. Момент двигателя привода подвижного элемента компенсаторного устройства имеет две составляющие. Первая из них, статическая, обусловлена моментом от распределенного веса этого подвижного элемента и веса в воде троса и подводного объекта. Вторая составляющая, динамическая, определяется приведенным к валу двигателя суммарным моментом инерции привода подвижного элемента. Она пропорциональна угловому ускорению двигателя. При работе двигателя в режиме компенсации влияния качки судна первая составляющая момента двигателя соизмерима с амплитудным значением второй составляющей этого момента. Мощность двигателя, его масса и стоимость существенно больше аналогичных величин, имеющих место при условии, что двигатель не нагружен указанной первой составляющей момента.
Задачей, на решение которой направлено предлагаемое изобретение, является улучшение технико-экономических показателей спускоподъемного устройства, которое выполняет операции спуска и подъема подводных зарядных станций.
Поставленная задача достигается тем, что в спускоподъемное устройство, содержащее установленную на судне подъемную лебедку, гибкий тяговый орган подъемной лебедки, который связывает барабан этой лебедки с подводным объектом, снабженное приводом компенсаторное устройство, у подвижного элемента которого ось наклона расположена в плоскости, параллельной плоскости ватерлинии судна, она плотно соединена с этим элементом и установлена на подшипниках, закрепленных в установленной на судне опоре компенсаторного устройства, связанные с указанным подвижным элементом первый направляющий и первый грузовой блоки, которые огибает гибкий тяговый орган подъемной лебедки, причем подшипник первого направляющего блока насажен на ось наклона указанного подвижного элемента, а первый грузовой блок прикреплен к тому, переднему, концу этого подвижного элемента, который находится над подводным объектом, а также акселерометр, прикрепленный к опоре компенсаторного устройства так, что направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна, первый и второй интегрирующие фильтры, компаратор, измерительные преобразователи перемещения и скорости перемещения указанного подвижного элемента относительно опоры компенсаторного устройства, первый и второй командные блоки, первый управляющий блок, вход которого подключен к первому командному блоку, а выход - к управляющему входу двигательного устройства привода подъемной лебедки, и второй управляющий блок, первый и второй выходы которого подключены соответственно к первому и второму управляющим входам привода компенсаторного устройства, к семи входам второго управляющего блока подключены соответственно следующие выходы: к первому входу второго управляющего блока - выход второго командного блока, ко второму входу - выход акселерометра, к третьему входу - выход первого интегрирующего фильтра, к четвертому входу - выход второго интегрирующего фильтра, к пятому и шестому входам - соответственно выходы измерительных преобразователей наклона и скорости наклона указанного подвижного элемента относительно опоры компенсаторного устройства, к седьмому входу - выход компаратора, первый, второй и третий входы которого подключены соответственно к выходам второго командного блока, упомянутого измерительного преобразователя перемещения и второго интегрирующего фильтра, вход которого подключен к выходу первого интегрирующего фильтра, у которого вход подключен к выходу акселерометра, причем привод компенсаторного устройства выполняет функцию системы автоматического управления тем приложенным к подвижному элементу компенсаторного устройства моментом, который создает двигательное устройство этого привода, при этом указанная система выполняет управление по следующим видам возмущения: по качке судна, скорости и ускорению этой качки, дополнительно введены противовес, второй и третий направляющие блоки, второй и третий грузовые блоки, первый и второй уравнительные блоки, третий командный и третий управляющий блоки, кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, к которому прикреплен нижний конец этого кабеля, и кабельная лебедка, поддерживающая постоянство усилия натяжения указанного кабеля, с барабаном, на который заведен этот кабель, и устройством для соединения токоведущих жил на верхнем конце упомянутого кабеля с судовой электроэнергетической системой, вход третьего управляющего блока подключен к третьему командному блоку, а выход - к управляющему входу двигательного устройства привода кабельной лебедки, опора компенсаторного устройства выполнена в виде двух прикрепленных к корпусу судна колонн, скрепленных сверху перекладиной, подвижный элемент компенсаторного устройства выполнен в виде размещенной между указанными колоннами прямоугольной подъемно-опускной рамы, составленной из расположенных по периметру этой рамы первой и второй продольных, а также передней и задней поперечных балок, концы закрепленной в средних частях первой и второй продольных балок и направленной перпендикулярно им оси наклона этой рамы закреплены в указанных колоннах, внутри упомянутой рамы на эту ось насажены подшипники направляющих блоков, при этом первый и второй из этих блоков расположены соответственно вблизи первой и второй продольных балок, а третий направляющий блок находится посредине между первым и вторым направляющими блоками, в передних концах упомянутых продольных балок подъемно-опускной рамы закреплена ось грузовых блоков, которая расположена параллельно оси наклона этой рамы и на которую насажены подшипники грузовых блоков, при этом первый и второй из этих блоков расположены соответственно вблизи первой и второй продольных балок, а третий грузовой блок находится посредине между первым и вторым грузовыми блоками, противовес прикреплен к задней поперечной балке подъемно-опускной рамы, первый и второй уравнительные блоки прикреплены к верхней части корпуса подводного объекта у краев этой части так, что окружности наименьшего радиуса ручьев первого и второго уравнительных блоков лежат в одной плоскости, в которой, при невозмущенном состоянии системы судно - подводный объект, находится также продольная осевая линия подводного объекта, проходящая через его центр тяжести в подводном положении, а прямая, проходящая через центры указанных окружностей первого и второго уравнительных блоков, параллельна упомянутой продольной осевой линии подводного объекта, в качестве гибкого тягового органа подъемной лебедки использован трос, огибающий последовательно первый направляющий, первый грузовой, первый и второй уравнительные, второй грузовой и второй направляющий блоки, концы троса заведены на барабан подъемной лебедки, причем при вращении барабана ветви троса навиваются на него симметрично и одновременно, сходящий с барабана кабельной лебедки кабель по пути к подводному объекту огибает третий направляющий и третий грузовой блоки, акселерометр прикреплен к перекладине опоры компенсаторного устройства так, что он находится над осью наклона подъемно-опускной рамы посредине между первым и вторым направляющими блоками.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи:
Признаки «…в спускоподъемное устройство дополнительно введены… третий направляющий и третий грузовой блоки,… кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, к которому прикреплен нижний конец этого кабеля, и кабельная лебедка, поддерживающая постоянство усилия натяжения указанного кабеля, с барабаном, на который заведен этот кабель, и устройством для соединения токоведущих жил на верхнем конце упомянутого кабеля с судовой электроэнергетической системой,… в качестве гибкого тягового органа подъемной лебедки использован трос,… сходящий с барабана кабельной лебедки кабель по пути к подводному объекту огибает третий направляющий и третий грузовой блоки…» обеспечивают снижение массы подъемной лебедки и диаметров ее блоков, а также повышение надежности работы спускоподъемного устройства благодаря замене тяжелого, обладающего пониженными значениями гибкости и ресурса, кабель-троса на сочетание тонкого, гибкого, дешевого и высоконадежного троса с легким, дешевым кабелем, который легко заменить при израсходовании его ресурса работы.
Признаки «…в спускоподъемное устройство дополнительно введены второй направляющий и второй грузовой блоки, первый и второй уравнительные блоки,… опора компенсаторного устройства выполнена в виде двух прикрепленных к корпусу судна колонн, скрепленных сверху перекладиной, подвижный элемент компенсаторного устройства выполнен в виде размещенной между указанными колоннами прямоугольной подъемно-опускной рамы, составленной из расположенных по периметру этой рамы первой и второй продольных, а также передней и задней поперечных балок, концы закрепленной в средних частях первой и второй продольных балок и направленной перпендикулярно им оси наклона этой рамы закреплены в указанных колоннах, внутри упомянутой рамы на эту ось насажены подшипники направляющих блоков, при этом первый и второй из этих блоков расположены соответственно вблизи первой и второй продольных балок,… в передних концах упомянутых продольных балок подъемно-опускной рамы закреплена ось грузовых блоков, которая расположена параллельно оси наклона этой рамы и на которую насажены подшипники грузовых блоков, при этом первый и второй из этих блоков расположены соответственно вблизи первой и второй продольных балок,… в качестве гибкого тягового органа подъемной лебедки использован трос, огибающий последовательно первый направляющий, первый грузовой,… второй грузовой и второй направляющий блоки, концы троса заведены на барабан подъемной лебедки, причем при вращении барабана ветви троса навиваются на него симметрично и одновременно,…» позволяют устранить вращение подводного объекта в горизонтальной плоскости, что особенно важно, когда этим объектом является подводная зарядная станция, в которую под водой входит и из нее выходит автономный необитаемый подводный аппарат.
Признаки «…в спускоподъемное устройство дополнительно введен… противовес…» и «…противовес прикреплен к задней поперечной балке подъемно-опускной рамы…» позволяют приложенный к двигателю привода подвижного элемента компенсаторного устройства момент от распределенного веса подъемно-опускной рамы и веса в воде троса и подводного объекта уравновесить моментом, создаваемым противовесом, что обеспечивает снижение расчетной мощности этого двигателя, а также массы и стоимости двигателя и приводного механизма подвижного элемента компенсаторного устройства.
Признаки «…в спускоподъемное устройство дополнительно введены… первый и второй уравнительные блоки…», «…первый и второй уравнительные блоки прикреплены к верхней части корпуса подводного объекта у краев этой части так, что окружности наименьшего радиуса ручьев первого и второго уравнительных блоков лежат в одной плоскости, в которой, при невозмущенном состоянии системы судно - подводный объект, находится также продольная осевая линия подводного объекта, проходящая через его центр тяжести в подводном положении, а прямая, проходящая через центры указанных окружностей первого и второго уравнительных блоков, параллельна упомянутой продольной осевой линии подводного объекта…», «…в качестве гибкого тягового органа подъемной лебедки использован трос, огибающий… первый и второй уравнительные блоки…» и «…акселерометр прикреплен к перекладине опоры компенсаторного устройства так, что он находится над осью наклона подъемно-опускной рамы посредине между первым и вторым направляющими блоками» позволяют при наличии качки судна в направлении, параллельном плоскости, проходящей через осевые линии колонн, которые входят в состав опоры компенсаторного устройства, практически исключить продольную качку подводного объекта.
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые испрашивается правовая охрана. Именно такая совокупность существенных признаков заявленного спускоподъемного устройства позволила получить технический результат, который выражается в следующем: вращение подводной зарядной станции в горизонтальной плоскости устраняется тем, что гибкий тяговый орган подъемной лебедки имеет две ветви, которые соединяют подводную зарядную станцию с механизмом подъемной лебедки и разносятся друг от друга на расстояние, равное длине этой станции;
повышается надежность и снижается стоимость спускоподъемного устройства путем замены кабель-троса на трос, выполняющий функцию гибкого тягового органа подъемной лебедки, и кабель, предназначенный для передачи электроэнергии от судовой электроэнергетической системы к подводной зарядной станции, что требует введение кабельной лебедки в состав спускоподъемного устройства;
постоянная составляющая момента двигателя привода подвижного элемента компенсаторного устройства устраняется с помощью противовеса, закрепленного на этом подвижном элементе.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Следовательно, заявленное изобретение является новым, обладает изобретательным уровнем и пригодно для использования.
Сущность изобретения поясняется чертежами, где на фиг.1 представлено расположение элементов судового спускоподъемного устройства; на фиг.2 показан вид спускоподъемного устройства сверху, совмещенный с функциональными схемами управления приводами подъемной лебедки, компенсаторного устройства и кабельной лебедки; на фиг.3 показан вид судового спускоподъемного устройства с кормы в нос судна.
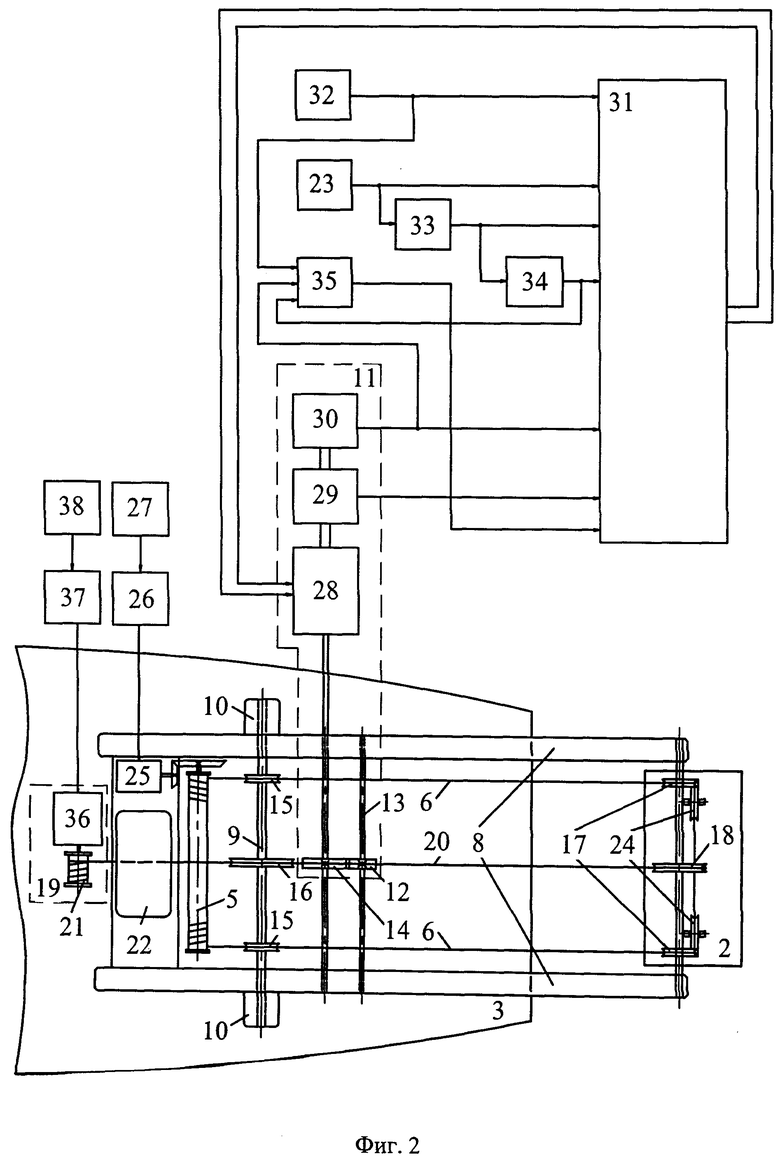
На фиг.1 показано судовое спускоподъемное устройство 1, расположенное на корме судна и предназначенное для спуска и подъема подводного объекта 2, выполняющего функцию подводной зарядной станции (ПЗС). Спускоподъемное устройство 1 содержит установленную на судне-носителе 3 подъемную лебедку 4 с барабаном 5, на который заведены верхние концы троса 6, выполняющего функцию гибкого тягового органа подъемной лебедки 4. При вращении барабана 5 ветви троса 6 навиваются на него симметрично и одновременно. На судне-носителе 3 установлено компенсаторное устройство 7. Подвижный элемент 8 компенсаторного устройства 7 выполнен в виде прямоугольной подъемно-опускной рамы, составленной из расположенных по периметру этой рамы первой и второй продольных, а также передней и задней поперечных балок (см. фиг.2). Концы закрепленной в средних частях первой и второй продольных балок и направленной перпендикулярно им оси 9 наклона этой рамы входят в подшипники, установленные в двух колоннах 10, которые выполняют функцию опоры компенсаторного устройства 7, скреплены сверху перекладиной и прикреплены к корпусу судна 3. Ось 9 наклона подъемно-опускной рамы 8 расположена в плоскости, параллельной плоскости ватерлинии судна. Рама 8 соединена с приводом 11 компенсаторного устройства 7.
Передаточное устройство привода 11, предназначенное для поворота рамы 8 вокруг оси 9, показано условно в виде механизма с передачей, содержащей зубчатую рейку 12, ось 13 которой закреплена в раме 8, и зубчатое колесо 14. Внутри рамы 8 на ось 9 насажены подшипники направляющих блоков. Первый и второй направляющие блоки 15 расположены соответственно вблизи первой и второй продольных балок подъемно-опускной рамы 8, а третий направляющий блок 16 находится посредине между первым и вторым направляющими блоками 15 (см. фиг.2). В передних концах продольных балок подъемно-опускной рамы 8 закреплена ось грузовых блоков, которая расположена параллельно оси наклона рамы 8 и на которую насажены подшипники грузовых блоков. Первый и второй грузовые блоки 17 расположены соответственно вблизи первой и второй продольных балок, а третий грузовой блок 18 находится посредине между первым и вторым грузовыми блоками 17 (см. фиг.2).
В состав СПУ 1 входит установленная на судне 3 кабельная лебедка 19. Кабель 20 передает электроэнергию от судовой электроэнергетической системы на подводный объект 2. Использование троса 6 в качестве гибкого тягового органа и кабеля 20 для передачи электроэнергии от судовой электроэнергетической системы к подводной зарядной станции повышает надежность и снижает стоимость спускоподъемного устройства.
Верхний конец кабеля 20 заведен на барабан 21 кабельной лебедки 19 и устройство для соединения токоведущих жил с судовой электроэнергетической системой. Нижний конец кабеля 20 связан с ПЗС 2. Кабель 20, сходящий с барабана 21 кабельной лебедки 19, по пути к подводному объекту 2 огибает третий направляющий 16 и третий грузовой 18 блоки. При выполнении вспомогательных операций (осмотр кабеля, его замена) кабельная лебедка 19 и ее привод входят в состав системы автоматического управления, которая изменяет ту скорость барабана 21 кабельной лебедки 19, с которой на него наматывается или с него сматывается кабель 20. В основном режиме работы спускоподъемного устройства 1, когда осуществляется заряд аккумуляторов автономного подводного аппарата, упомянутая система автоматического управления выполняет функцию поддержания неизменным усилия натяжения кабеля 20. Подобные системы широко применяются, поэтому структурная схема этой системы и необходимые измерительные преобразователи не показываются.
Противовес 22 прикреплен к задней поперечной балке подъемно-опускной рамы 8 (см. фиг.1 и 2). Акселерометр 23 установлен на перекладине опоры 10 компенсаторного устройства 7 так, что он находится над осью наклона подъемно-опускной рамы 8 посредине между первым и вторым направляющими блоками 15, а направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна (см. фиг.1 и 3).
Первый и второй уравнительные блоки 24 прикреплены к верхней части корпуса подводного объекта 2. Трос 6 огибает последовательно первый направляющий 15, первый грузовой 17, первый и второй уравнительные 24, второй грузовой 17 и второй направляющий 15 блоки (см. фиг.1, 2, и 3).
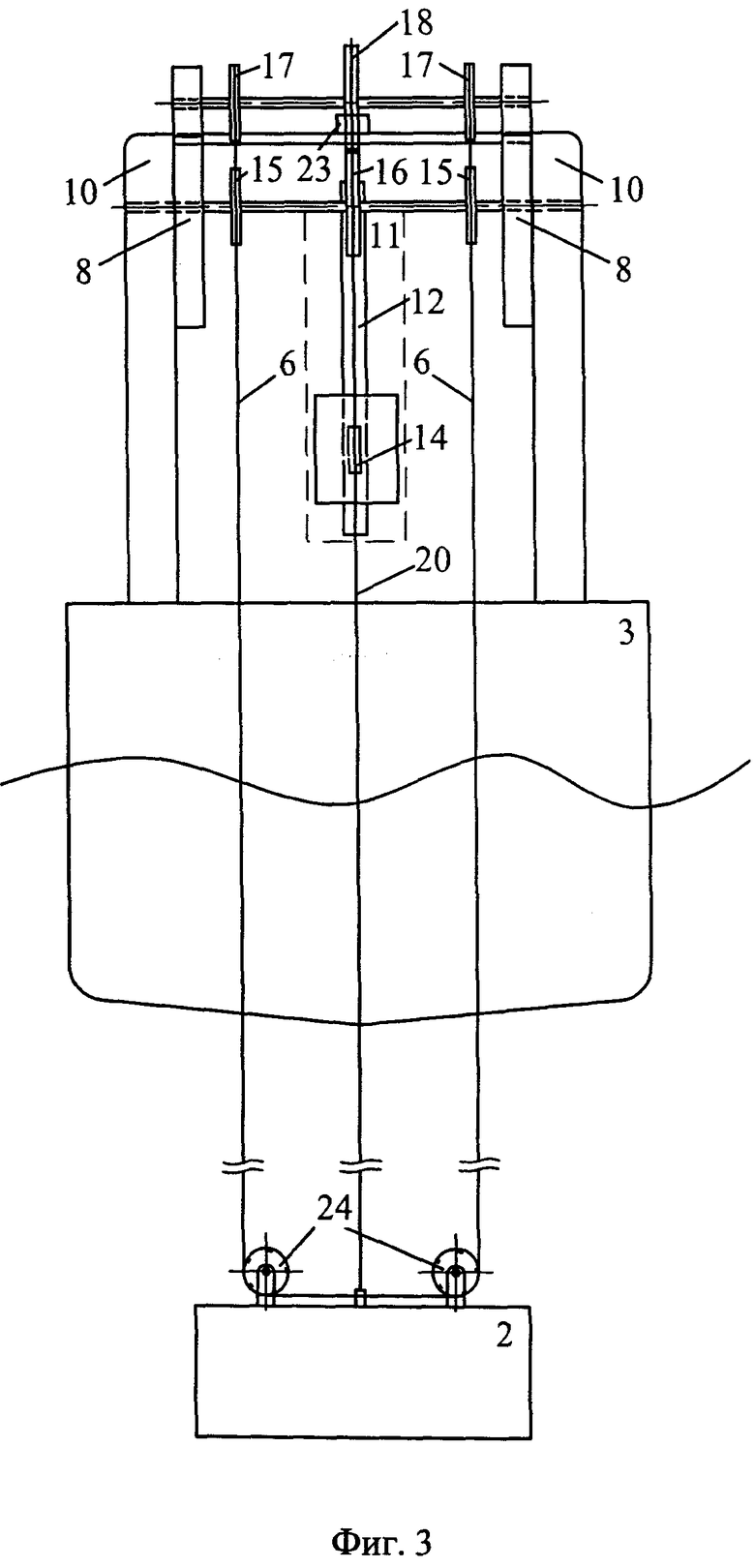
Функциональные схемы управления приводами подъемной лебедки, компенсаторного устройства и кабельной лебедки спускоподъемного устройства и его вид сверху показаны на фиг.2.
Управляющий вход двигательного устройства 25 привода подъемной лебедки 4 подключен к выходу первого управляющего блока 26, вход которого подключен к первому командному блоку 27. Двигательное устройство 25 вращает барабан 5 подъемной лебедки.
Привод 11 компенсаторного устройства 7 включает в себя двигательное устройство 28 подъемно-опускной рамы 8 и передаточное устройство, показанное условно в виде механизма с зубчатой рейкой 12, осью зубчатой рейки 13 и зубчатого колеса 14. С приводом 11 сопряжены измерительные преобразователи скорости 29 и перемещения 30 подъемно-опускной рамы 8 относительно колонны 10 (относительно основания компенсаторного устройства). Первый и второй управляющие входы двигательного устройства 28 привода подъемно-опускной рамы 8 подключены соответственно к первому и второму выходам второго управляющего блока 31, первый вход которого подключен ко второму командному блоку 32. Кроме того, устройство содержит акселерометр 23, который прикреплен к колонне 10 компенсаторного устройства, а также первый 33 и второй 34 интегрирующие фильтры. Выход акселерометра 23 подключен ко второму входу второго управляющего блока 31 и к входу первого интегрирующего фильтра 33, выход которого подключен к третьему входу второго управляющего блока 31 и к входу второго интегрирующего фильтра 34. Выход фильтра 34 подключен к четвертому входу второго управляющего блока 31, пятый и шестой входы которого подключены соответственно к выходам измерительных преобразователей перемещения 30 и скорости перемещения 29 подъемно-опускной рамы 8. Первый вход компаратора 35 соединен с выходом командного блока 32, второй вход компаратора 35 - с выходом измерительного преобразователя перемещения 30 подъемно-опускной рамы 8, а третий вход компаратора 35 - с выходом второго интегрирующего фильтра 34. Выход компаратора 35 подключен к седьмому входу второго управляющего блока 31.
Управляющий вход двигательного устройства 36 привода кабельной лебедки 19 подключен к выходу третьего управляющего блока 37, вход которого подключен к третьему командному блоку 38. Двигательное устройство 36 вращает барабан 21 кабельной лебедки 19. Кабель 20, сходящий с барабана 21 кабельной лебедки 19, по пути к подводному объекту 2 огибает третий направляющий 16 и третий грузовой 18 блоки.
На фиг.3 показан вид судового спускоподъемного устройства с кормы в нос судна.
СПУ установлено на корме судна 3. ПО 2 подвешен на двух ветвях троса 6, который проходит через направляющие 15 и уравнительные 24 блоки.
Выполнение подводных работ производится при малой степени волнения - до трех-четырех баллов. Судно располагается навстречу волнению и становится на якорь. Постоянство места расположения судна может также поддерживаться работой его гребной установки. При этом гребной движитель создает упор, устраняющий дрейф судна под действием ветра и морского волнения. При таком расположении судна наиболее выражены два вида его качки: килевая и вертикальная. При этом основное перемещение оси наклона подъемно-опускной рамы происходит в направлении, перпендикулярном плоскости ватерлинии судна, то есть в том же направлении, что и ось максимальной чувствительности акселерометра. Амплитуды килевой и вертикальной качки при указанном расположении судна в несколько раз меньше, чем амплитуды вертикальной и бортовой качки при расположении судна лагом к направлению распространения волн. Именно по этой причине СПУ рассматриваемого назначения располагают на корме, а не на борту судна.
Реальное волнение является трехмерным нерегулярным процессом, поэтому и при расположении судна навстречу волнению действуют не только килевая и вертикальная, но и бортовая качка, которая в таком случае имеет минимальный уровень.
Рассмотрим работу СПУ 1 при условии, что бортовая качка судна 3 отсутствует. Гибкий тяговый орган 6 подъемной лебедки 4 имеет две ветви, которые соединяют подводную зарядную станцию 2 с механизмом подъемной лебедки 4 и разносятся друг от друга на расстояние, равное длине этой станции. Благодаря такой конструкции тягового органа 6 устраняется вращение зарядной станции 2 в горизонтальной плоскости, что особенно важно при входе и выходе из нее АНПА. Прикрепленный к задней поперечной балке подъемно-опускной рамы 8 противовес 22 позволяет устранить постоянную составляющую момента двигателя привода 11 подвижного элемента 8 компенсаторного устройства 7, что обеспечивает снижение расчетной мощности, массы и стоимости его двигателя и приводного механизма.
Опускание ПЗС на поверхность воды и последующий его вывод на заданную глубину погружения осуществляют путем сматывания троса 6 с барабана 5 подъемной лебедки 4 под действием двигательного устройства 25 этой лебедки со скоростью, заданной первым командным блоком 27. Заданное значение скорости поступает на управляющий вход двигательного устройства 25 через первый управляющий блок 26. Система автоматического управления (САУ) кабельной лебедки 19 осуществляет поддержание заданного натяжения кабеля. Третьим командным блоком 38 задается значение скорости травления кабеля, соответствующее требуемому усилию натяжения. Этот сигнал поступает на управляющий вход двигательного устройства 36 через третий управляющий блок 37. При увеличении натяжения в тросе САУ отработает таким образом, что скорость травления возрастает, а при уменьшении натяжения - снижается. При подъеме ПЗС 2 на судно 3 кабельная лебедка 19 будет выбирать трос. При этом скорость выбирания будет определяться усилием в кабеле. В рабочем положении, когда ПЗС 2 находится на заданной глубине, подъемная 4 и кабельная 19 лебедки не работают. Из-за наличия уравнительных блоков 24 продольная осевая линия подводного объекта находится в горизонтальном положении, как и прямая, соединяющая центры указанных блоков.
На глубине порядка 20 м и более качка АНПА практически отсутствует. Благодаря наличию сигналов от акселерометра 23 и интегрирующих фильтров 33 и 34 осуществляется управление двигательным устройством 28 подъемно-опускной рамы 8 по возмущению - по значениям, вызванным качкой судна, перемещения, а также скорости и ускорения оси подъемно-опускной стрелы. Тем самым компенсируется влияние инерционных свойств элементов указанного привода, а также сил трения в его механической части.
Вследствие указанного действия САУ практически неизменно и положение ПЗС 2. АНПА свободно, без ударов о ПЗС 2 входит внутрь. С помощью специальных устройств состыковываются контактные поверхности АНПА и ПЗС 2. И начинается передача электроэнергии от ПЗС 2 на АНПА. Происходит зарядка аккумулятора АНПА. САУ кабельной лебедкой 19 выполняет функцию поддержания неизменным усилия натяжения кабеля 20. После завершения зарядки аккумулятора происходит расстыковка АНПА и ПЗС 2, и АНПА выходит из ПЗС 2.
Под действием бортовой качки ось наклона не остается в горизонтальном положении, но поворачивается в плоскости, проходящей через осевые линии колонн 10. Это движение вызывает поворачивание с частотой бортовой качки подъемно-опускной рамы 8 вокруг ее продольной осевой линии.
Акселерометр 23 измеряет ускорение качки середины оси наклона, а система автоматического управления приводом 11 компенсаторного устройства 7 работает так, что высота середины оси грузовых блоков 17, относительно невзволнованной поверхности воды, остается постоянной. Поэтому практически не изменяется также высота третьего грузового блока 18 и натяжение кабеля 20. Барабан 21 кабельной лебедки 19 остается неподвижным. Из-за указанных поворотов подъемно-опускной рамы 8 вокруг ее продольной осевой линии при наличии бортовой качки судна 3 происходит изменение высоты, относительно невзволнованной поверхности моря, первого и второго грузовых блоков 17. Подъем первого грузового блока при одновременном опускании второго грузового блока вызывает увеличение усилия в одной и его уменьшение в другой ветви троса 6, которые находятся соответственно между первым грузовым 17 и первым уравнительным 24 блоками, а также вторым грузовым 17 и вторым уравнительным 24 блоками. Так как подводный объект 2 обладает значительной суммарной массой, включающей присоединенную массу воды, то его перемещение, вызванное неравенством усилий в ветвях троса, практически отсутствует. Происходит лишь сопровождаемое вращением уравнительных блоков 24 перемещение троса 6 относительно подводного объекта 2. Увеличивается длина ветви троса 6 между первым грузовым 17 и первым уравнительным 24 блоками и уменьшается длина второй ветви троса 6. В результате, при малом моменте трения в подшипниках уравнительных блоков 24, глубина осей уравнительных блоков 24 и горизонтальное положение продольной осевой линии подводного объекта 2 остаются практически неизменными. Аналогичный результат получается и при повороте подъемно-опускной рамы 8 в обратном направлении. Продольная качка подводного объекта 2 отсутствует.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| СПУСКОПОДЪЁМНОЕ УСТРОЙСТВО | 2015 |
|
RU2585181C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2381133C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГЛУБИНОЙ ПОГРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2261191C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2590801C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2584351C1 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
Изобретение относится к судовой технике, к спускоподъемным устройствам. Спускоподъемное устройство содержит установленные на корме судна подъемную и кабельную лебедки, а также компенсаторное устройство, снабженное подъемно-опускной рамой. Две ветви троса подъемной лебедки огибают прикрепленные к подъемно-опускной раме два грузовых блока и два уравнительных блока, прикрепленных к верхней части подводной зарядной станции. Когда она находится на заданной глубине, подъемная лебедка не работает. Поперечная качка судна сопровождается вращением уравнительных блоков, при этом продольная качка зарядной станции отсутствует. Привод подъемно-опускной рамы вместе с акселерометром и двумя интегрирующими фильтрами, которые измеряют ускорение, скорость и перемещение оси крепления этой рамы, образует систему автоматического управления углом ее наклона. При нахождении зарядной станции под водой подъемно-опускная рама совершает движения, противоположно направленные перемещению судна, вызванному его продольной качкой. Повышение быстродействия компенсаторного устройства обеспечивается дополнительным регулированием по возмущению: положению, скорости и ускорению оси крепления подъемно-опускной рамы. Достигаются удешевление и повышение надежности устройства. 3 ил. 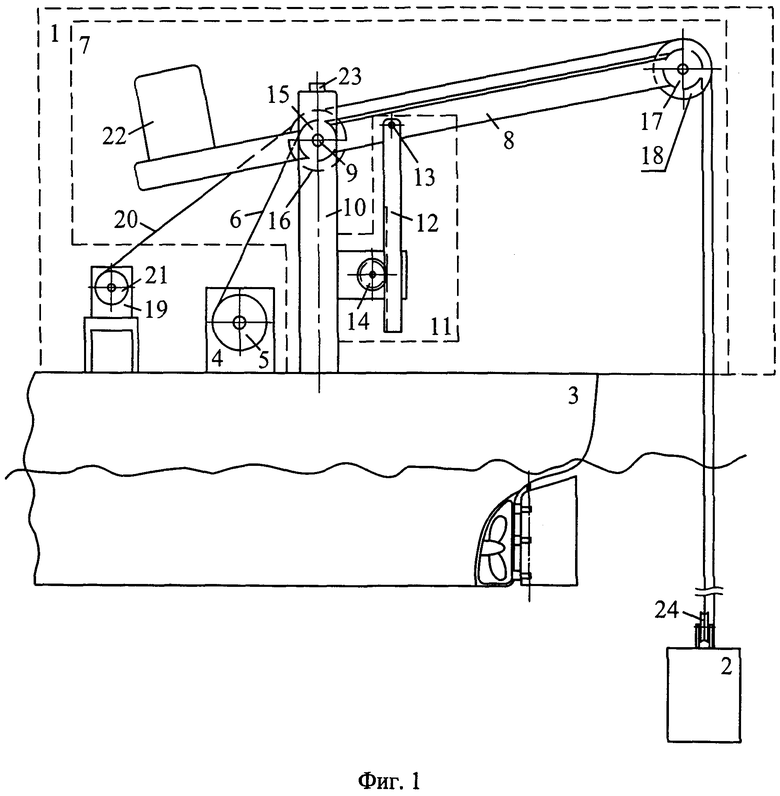
Спускоподъемное устройство, содержащее установленную на судне подъемную лебедку, гибкий тяговый орган подъемной лебедки, который связывает барабан этой лебедки с подводным объектом, снабженное приводом компенсаторное устройство, у подвижного элемента которого ось наклона расположена в плоскости, параллельной плоскости ватерлинии судна, она плотно соединена с этим элементом и установлена на подшипниках, закрепленных в установленной на судне опоре компенсаторного устройства, связанные с указанным подвижным элементом первый направляющий и первый грузовой блоки, которые огибают гибкий тяговый орган подъемной лебедки, причем подшипник первого направляющего блока насажен на ось наклона указанного подвижного элемента, а первый грузовой блок прикреплен к тому, переднему, концу этого подвижного элемента, который находится над подводным объектом, а также акселерометр, прикрепленный к опоре компенсаторного устройства так, что направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна, первый и второй интегрирующие фильтры, компаратор, измерительные преобразователи перемещения и скорости перемещения указанного подвижного элемента относительно опоры компенсаторного устройства, первый и второй командные блоки, первый управляющий блок, вход которого подключен к первому командному блоку, а выход - к управляющему входу двигательного устройства привода подъемной лебедки, и второй управляющий блок, первый и второй выходы которого подключены соответственно к первому и второму управляющим входам привода компенсаторного устройства, к семи входам второго управляющего блока подключены соответственно следующие выходы: к первому входу второго управляющего блока - выход второго командного блока, ко второму входу - выход акселерометра, к третьему входу - выход первого интегрирующего фильтра, к четвертому входу - выход второго интегрирующего фильтра, к пятому и шестому входам - соответственно выходы измерительных преобразователей наклона и скорости наклона указанного подвижного элемента относительно опоры компенсаторного устройства, к седьмому входу - выход компаратора, первый, второй и третий входы которого подключены соответственно к выходам второго командного блока, упомянутого измерительного преобразователя перемещения и второго интегрирующего фильтра, вход которого подключен к выходу первого интегрирующего фильтра, у которого вход подключен к выходу акселерометра, причем привод компенсаторного устройства выполняет функцию системы автоматического управления тем приложенным к подвижному элементу компенсаторного устройства моментом, который создает двигательное устройство этого привода, при этом указанная система выполняет управление по следующим видам возмущения: по качке судна, скорости и ускорению этой качки, отличающееся тем, что в устройство дополнительно введены противовес, второй и третий направляющие блоки, второй и третий грузовые блоки, первый и второй уравнительные блоки, третий командные и третий управляющие блоки, кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, к которому прикреплен нижний конец этого кабеля, и кабельная лебедка, поддерживающая постоянство усилия натяжения указанного кабеля с барабаном, на который заведен этот кабель, и устройством для соединения токоведущих жил на верхнем конце упомянутого кабеля с судовой электроэнергетической системой, вход третьего управляющего блока подключен к третьему командному блоку, а выход - к управляющему входу двигательного устройства привода кабельной лебедки, опора компенсаторного устройства выполнена в виде двух прикрепленных к корпусу судна колонн, скрепленных сверху перекладиной, подвижный элемент компенсаторного устройства выполнен в виде размещенной между указанными колоннами прямоугольной подъемно-опускной рамы, составленной из расположенных по периметру этой рамы первой и второй продольных, а также передней и задней поперечных балок, концы закрепленной в средних частях первой и второй продольных балок и направленной перпендикулярно им оси наклона этой рамы закреплены в указанных колоннах, внутри упомянутой рамы на эту ось насажены подшипники направляющих блоков, при этом первый и второй из этих блоков расположены соответственно вблизи первой и второй продольных балок, а третий направляющий блок находится посредине между первым и вторым направляющими блоками, в передних концах упомянутых продольных балок подъемно-опускной рамы закреплена ось грузовых блоков, которая расположена параллельно оси наклона этой рамы и на которую насажены подшипники грузовых блоков, при этом первый и второй из этих блоков расположены соответственно вблизи первой и второй продольных балок, а третий грузовой блок находится посредине между первым и вторым грузовыми блоками, противовес прикреплен к задней поперечной балке подъемно-опускной рамы, первый и второй уравнительные блоки прикреплены к верхней части корпуса подводного объекта у краев этой части так, что окружности наименьшего радиуса ручьев первого и второго уравнительных блоков лежат в одной плоскости, в которой, при невозмущенном состоянии системы судно - подводный объект, находится также продольная осевая линия подводного объекта, проходящая через его центр тяжести в подводном положении, а прямая, проходящая через центры указанных окружностей первого и второго уравнительных блоков, параллельна упомянутой продольной осевой линии подводного объекта, в качестве гибкого тягового органа подъемной лебедки использован трос, огибающий последовательно первый направляющий, первый грузовой, первый и второй уравнительные, второй грузовой и второй направляющий блоки, концы троса заведены на барабан подъемной лебедки, причем при вращении барабана ветви троса навиваются на него симметрично и одновременно, сходящий с барабана кабельной лебедки кабель по пути к подводному объекту огибает третий направляющий и третий грузовой блоки, акселерометр прикреплен к перекладине опоры компенсаторного устройства так, что он находится над осью наклона подъемно-опускной рамы посредине между первым и вторым направляющими блоками.
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| Спускоподъемное устройство судна для многомодульных буксируемых систем | 1990 |
|
SU1736830A1 |
| Судовое спускоподъемное устройство | 1987 |
|
SU1594060A1 |
| Гидравлический генератор импульсов | 1982 |
|
SU1068632A1 |
| US 2005242332 A1, 03.11.2005 | |||

