Изобретение относится к судовой технике, а именно к судовым спускоподъемным устройствам.
Известны спускоподъемные устройства, содержащие установленную на судне подъемную лебедку, кабель-трос, один конец которого заведен на барабан подъемной лебедки, а другой прикреплен к подводному объекту, а также устройство управления приводом подъемной лебедки, к входам которого подключены выходы задатчиков частоты вращения двигателя лебедки и глубины погружения подводного объекта, измерительных преобразователей скорости качки грузового блока лебедки и глубины погружения подводного объекта [1, 2]. В таких устройствах управление скоростью подъемной лебедки в режимах спуска и подъема осуществляется как по заведенному с пульта управления значению, так и по возмущению - по скорости качки грузового блока. В режиме стабилизации глубины погружения подводного объекта управление приводом лебедки осуществляется по возмущению - по скорости качки грузового блока и по отклонению глубины погружения подводного объекта. Эти устройства обеспечивают высокую точность управления глубиной погружения подводного объекта и практически полное устранение влияния качки судна-носителя при морском волнении до четырех - пяти баллов.
У этих устройств имеются следующие недостатки: низкое быстродействие контура управления по отклонению глубины погружения, т.к. для обеспечения устойчивости работы устройства частота среза этого контура должна быть меньше частоты первого резонансного максимума звена кабель-трос - подводный объект, которая составляет 0,1 Гц и менее при длине кабель-троса несколько километров; резкое сокращение срока службы кабель-троса, что вызвано его изгибными деформациями при сматывании-наматывании на барабан лебедки в процессе компенсации влияния качки судна-носителя под действием управления по возмущению. Кабель-трос допускает всего 1000-2000 изгибов при прохождении через блоки. Этот ресурс может быть израсходован за несколько часов непрерывной работы лебедки.
Наиболее близким по технической сущности к заявленному устройству является выбранное в качестве прототипа спускоподъемное устройство, содержащее установленную на судне подъемную лебедку, кабель-трос, один конец которого заведен на барабан подъемной лебедки, а другой прикреплен к подводному объекту, и амортизирующее устройство, подвижный элемент которого контактирует с кабель-тросом, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу привода подъемной лебедки, и второй управляющий блок, выход которого подключен к управляющему входу привода подвижного элемента амортизирующего устройства, первый вход второго управляющего блока связан со вторым задатчиком, а второй и третий входы этого блока подключены соответственно к выходам измерительных преобразователей перемещения и скорости перемещения подвижного элемента амортизирующего устройства относительно основания этого устройства [3].
Амортизирующее устройство представляет собой амортизирующую лебедку, установленную на подводном объекте, а подвижным элементом этого устройства является канат, причем один конец каната заведен на барабан амортизирующей лебедки, а другой прикреплен замковым соединением к кабель-тросу, который образует петлю на участке от замкового соединения до гермоввода, через который кабель-трос вводится внутрь подводного объекта. Система управления приводом подъемной лебедки включает в себя первый задатчик, который задает среднюю скорость этой лебедки и первый управляющий блок. Второй задатчик задает среднее значение длины каната, смотанного с барабана амортизирующей лебедки. Этот задатчик соединен с первым входом второго управляющего блока через кабель-трос. Система автоматического управления (САУ) электроприводом амортизирующей лебедки замкнута отрицательными обратными связями по скорости и длине каната. Измерительные преобразователи длины и скорости каната подключены соответственно ко второму и третьему входам второго управляющего блока. Основное перемещение подводного объекта осуществляется путем сматывания или наматывания кабель-троса с барабана судовой лебедки со скоростью, заданной первым задатчиком. Амортизирующая лебедка вместе со вторым управляющим блоком и измерительными преобразователями скорости и длины каната образует САУ длиной каната этой лебедки. Структура второго управляющего блока и параметры его элементов таковы, что передаточная функция, определяющая изменения длины каната под действием возмущающих перемещений (перемещений замкового соединения), имеет вид передаточной функции фильтра верхних частот. Такой фильтр практически не пропускает воздействия с частотами, лежащими ниже диапазона частот качки судна: медленные изменения средней глубины погружения замкового соединения под действием течений, дрейфа судна и работы подъемной лебедки в установившемся режиме. Передаточная функция такого фильтра - отношение полиномов по степеням s (s - аргумент изображений функций времени с помощью преобразования Лапласа), причем максимальная степень s в полиномах числителя и знаменателя одинакова, но, в отличие от полинома знаменателя, у полинома числителя отсутствуют члены с s в нулевой и первой степенях. Частотная характеристика этой передаточной функции (получается при замене s на произведение мнимой единицы на угловую частоту, с которой изменяются переменные величины в рассматриваемом устройстве) в области частот качки и выше близка к (-1). При этом приращения длины каната амортизирующей лебедки и вызванного качкой судна изменения глубины погружения замкового соединения близки по абсолютному значению и противоположны по направлению. Например, при увеличении глубины погружения замкового соединения длина каната уменьшится. Этим обеспечивается стабилизация глубины погружения подводного объекта, независимо от длины кабель-троса, при действии на верхний конец кабель-троса вертикальной составляющей качки судна-носителя. Среднюю длину части каната, смотанной с барабана амортизирующей лебедки, можно изменять, подавая соответствующий сигнал со второго задатчика, установленного на судне. Это позволяет регулировать глубину погружения подводного объекта, компенсируя, например, влияние течений, или осуществить плавное сближение опускаемого объекта с каким-либо предметом на морском дне.
Основной недостаток этого устройства заключается в том, что входящее в него амортизирующее устройство установлено на подводном объекте. При этом увеличиваются масса и габаритные размеры подводного объекта и подъемной лебедки, поперечное сечение и масса кабель-троса и мощность привода подъемной лебедки. Кроме того, усложняется электроснабжение амортизирующего устройства, по сравнению с подъемной лебедкой, что ведет к возрастанию проявления указанных отрицательных последствий: применение электрических аккумуляторов, размещенных на подводном объекте, приводит к дополнительному увеличению массы и габаритных размеров опускаемого объекта, а передача электроэнергии с судна по кабель-тросу - к увеличению его поперечного сечения и массы.
Второй недостаток этого устройства - недостаточная компенсация влияния качки судна на глубину погружения подводного объекта, если масса этого объекта с массой присоединенной воды mпо соизмерима с массой mл, равной сумме приведенных к линейной скорости моментов инерции двигателя и передаточного устройства привода амортизирующей лебедки. В этом случае отношение  , которое равно ординате асимптоты указанной выше частотной характеристики, определяющей изменения положения подвижного элемента амортизирующего устройства под действием возмущающих перемещений, в области верхних частот, меньше единицы и тем значительнее, чем больше отношение
, которое равно ординате асимптоты указанной выше частотной характеристики, определяющей изменения положения подвижного элемента амортизирующего устройства под действием возмущающих перемещений, в области верхних частот, меньше единицы и тем значительнее, чем больше отношение  . Следовательно, с ростом отношения
. Следовательно, с ростом отношения  отношение абсолютных значений экстремальных перемещений подвижного элемента амортизирующего устройства и соответствующих им возмущающих перемещений становиться все меньше единицы. При этом эффективность работы амортизирующего устройства ухудшается.
отношение абсолютных значений экстремальных перемещений подвижного элемента амортизирующего устройства и соответствующих им возмущающих перемещений становиться все меньше единицы. При этом эффективность работы амортизирующего устройства ухудшается.
Третий недостаток этого устройства заключается в наличии тех перемещений подводного объекта, которые возникают при работе амортизирующего устройства во время качки судна и обусловлены механическими потерями в передаточном механизме привода подвижного элемента амортизирующего устройства (амортизирующей лебедки) и в его двигателе. При вращении двигателя амортизирующего устройства в направлении уменьшения длины каната приведенный к валу двигателя суммарный момент указанных потерь складывается с моментом статической нагрузки, также приведенным к валу двигателя. (Этот момент определяется весом подводного объекта в воде и его сопротивлением трения о воду.) Если же двигатель вращается в обратную сторону, то приведенный суммарный момент потерь вычитается из приведенного статического момента нагрузки. Переход двигателя через нулевое значение скорости, в зависимости от параметров амортизирующего устройства, его САУ, кабель-троса и качки судна, может происходить как мгновенно, так и с остановкой. В первом случае полный приведенный момент нагрузки скачком изменяется на двойное значение приведенного суммарного момента потерь. При этом амплитудное значение изменения длины каната меньше амплитудного значения перемещения, установленного САУ. (Установленное перемещение практически равно по абсолютному значению и противоположно по направлению перемещению замкового соединения, что в идеале должно обеспечивать полную компенсацию влияния качки судна.) Во втором случае двигатель стоит, пока его момент, под действием второго управляющего блока, не изменится на двойное значение приведенного суммарного момента потерь. То есть происходит дополнительное запаздывание изменения длины каната по отношению к значениям, установленным на выходе второго управляющего блока. В любом случае имеет место отличие мгновенных значений изменения длины каната от значений, установленных САУ, что проявляется в нерегулярном, как и качка судна, изменении глубины погружения подводного объекта.
Задачей, на решение которой направлено изобретение, является повышение эффективности использования подводного объекта путем снижения массовых и габаритных показателей подводного объекта и элементов самого устройства, уменьшения отклонений глубины погружения подводного объекта под действием качки судна-носителя, а также исключения дополнительных изменений глубины погружения подводного объекта, вызванных действием механических потерь в передаче привода подвижного элемента и в двигателе амортизирующего устройства.
Поставленная задача достигается тем, что в спускоподъемное устройство, содержащее установленную на судне подъемную лебедку, кабель-трос, один конец которого заведен на барабан подъемной лебедки, а другой прикреплен к подводному объекту, и амортизирующее устройство, подвижный элемент которого контактирует с кабель-тросом, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу привода подъемной лебедки, и второй управляющий блок, выход которого подключен к управляющему входу привода подвижного элемента амортизирующего устройства, первый вход второго управляющего блока связан со вторым задатчиком, а второй и третий входы этого блока подключены соответственно к выходам измерительных преобразователей перемещения и скорости перемещения подвижного элемента амортизирующего устройства относительно основания этого устройства, введен дифференцирующий фильтр, вход и выход которого подключены соответственно к выходу измерительного преобразователя скорости перемещения подвижного элемента и к четвертому входу второго управляющего блока, а амортизирующее устройство установлено на судне, подвижный элемент этого устройства выполнен в виде снабженного головным блоком подъемно-опускной стрелы, на оси крепления которой, закрепленной в стойке амортизирующего устройства и расположенной в плоскости, параллельной плоскости ватерлинии судна, насажен с возможностью свободного вращения дополнительный блок, который вместе с головным блоком подъемно-опускной стрелы охвачен кабель-тросом подъемной лебедки.
Поставленная задача достигается также тем, что в спускоподъемное устройство введен компаратор, выход которого подключен к пятому входу второго управляющего блока, а первый и второй входы компаратора подключены соответственно к входу и выходу дифференцирующего фильтра.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи:
Признак «…в спускоподъемное устройство введен дифференцирующий фильтр, вход и выход которого подключены соответственно к выходу измерительного преобразователя скорости перемещения подвижного элемента и к четвертому входу второго управляющего блока…» позволяет компенсировать влияние суммарного приведенного к валу двигателя момента инерции двигателя и передаточного механизма привода амортизирующего устройства. Тем самым обеспечивается равенство абсолютных значений экстремальных перемещений подвижного элемента амортизирующего устройства и соответствующих им возмущающих перемещений, действующих на амортизирующее устройство при качке судна-носителя.
Признак «…амортизирующее устройство установлено на судне…» позволяет упростить электроснабжение этого устройства, уменьшить массу и габаритные размеры подводного объекта и подъемной лебедки, поперечное сечение и массу кабель-троса, а также мощность привода подъемной лебедки.
Признак «…подвижный элемент амортизирующего устройства выполнен в виде снабженного головным блоком подъемно-опускной стрелы, ось крепления которой закреплена в стойке амортизирующего устройства и расположена в плоскости, параллельной плоскости ватерлинии судна…» позволяет во время качки судна поворачивать стрелу вокруг своей оси так, чтобы высота головного конца стрелы относительно невзволнованной водной поверхности оставалась постоянной. Тем самым практически исключается влияние качки судна на глубину погружения подводного объекта.
Признак «…в спускоподъемное устройство введен компаратор, выход которого подключен к пятому входу второго управляющего блока, а первый и второй входы компаратора подключены соответственно к входу и выходу дифференцирующего фильтра…» позволяет компенсировать влияние нелинейности механической характеристики суммарного момента потерь в передаточном механизме и в двигателе привода подвижного элемента амортизирующего устройства. Практически одновременно с изменением направления скорости подвижного элемента момент двигателя и приведенный к его валу суммарный момент потерь скачком изменяются на одно и то же значение, причем направления приращений этих моментов противоположно. Тем самым исключаются дополнительные изменения глубины погружения подводного объекта, вызванные нелинейностью статической механической характеристики двигателя амортизирующего устройства.
Таким образом, технический результат, который достигается при решении такой задачи, выражается в следующем:
амортизирующее устройство помещается не на подводном объекте, а на судне, что упрощает электроснабжение этого устройства и позволяет снизить массу и габаритные размеры подводного объекта и подъемной лебедки, поперечное сечение и массу кабель-троса и мощность привода подъемной лебедки;
динамический момент двигателя привода амортизирующего устройства, равный произведению приведенного к валу двигателя ускорения подвижного элемента этого устройства на суммарный приведенный к валу двигателя момент инерции двигателя и передаточного механизма привода амортизирующего устройства, компенсируется дополнительной составляющей электромагнитного момента двигателя, которая формируется вторым управляющим блоком на основании сигнала, пропорционального ускорению указанного подвижного элемента;
второй управляющий блок задает не только положение и скорость подвижного элемента амортизирующего устройства, но и скачкообразное приращение приведенного к валу двигателя момента привода амортизирующего устройства при изменении направления движения подвижного элемента. Значение этого приращения равно удвоенному значению приведенного суммарного момента потерь в передаточном устройстве привода подвижного элемента амортизирующего устройства и в его двигателе. Это позволяет исключить дополнительные изменения глубины погружения подводного объекта, вызванные действием указанного суммарного момента потерь.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Следственно, заявленное изобретение является новым, обладает изобретательским уровнем и пригодно для использования.
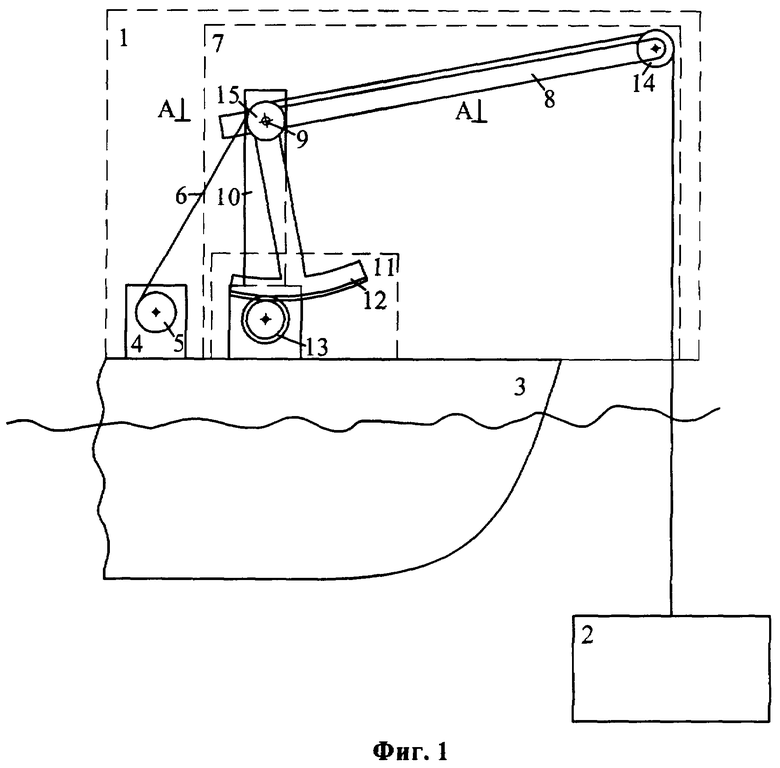
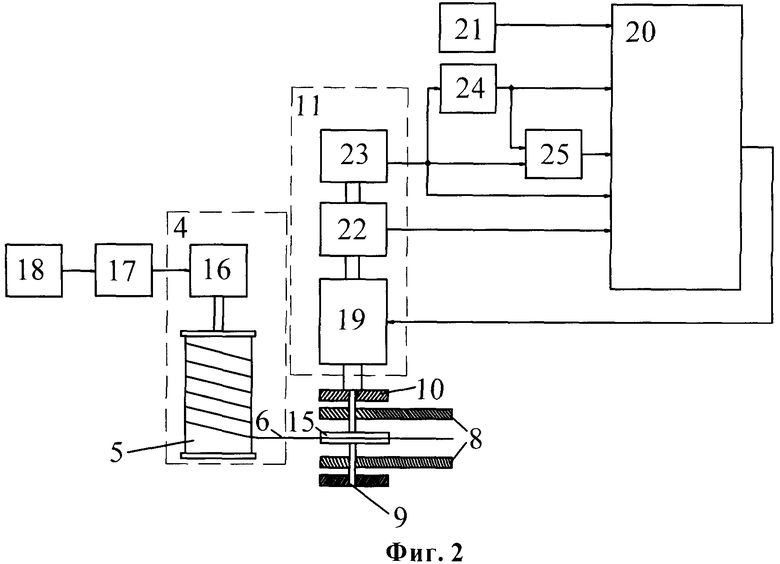
Сущность изобретения поясняется чертежами, где: на фиг.1 представлено расположение элементов судового спускоподъемного устройства; на фиг.2 показан вид спускоподъемного устройства сверху, совмещенный с разрезом по А-А и с функциональной схемой спускоподъемного устройства.
Судовое спускоподъемное устройство 1, предназначенное для спуска и подъема подводного объекта 2, содержит установленную на судне-носителе 3 подъемную лебедку 4. На барабан 5 этой лебедки запасован верхний конец кабель-троса 6, а его нижний конец соединен с подводным объектом 2. Установленное на судне-носителе 3 амортизирующее устройство 7 имеет подвижный элемент, выполненный в виде подъемно-опускной стрелы 8. Ось 9 крепления стрелы 8, расположенная в плоскости, параллельной плоскости ватерлинии судна, закреплена в стойке 10 амортизирующего устройства. Указанная стойка прикреплена к судну-носителю 3. Стрела 8 соединена с передаточным механизмом 11 амортизирующего устройства. Этот механизм, предназначенный для поворота стрелы 8 вокруг оси 9, показан условно в виде механизма с передачей, содержащей сектор зубчатого колеса 12 и зубчатое колесо 13. Возможны другие конструктивные исполнения указанного привода для изменения угла наклона стрелы 8, например, с задним стреловым полиспастом. Кабель-трос 6 охватывает головной блок 14 стрелы 8 и дополнительный блок 15, свободно насаженный на ось 9 этой стрелы. Управляющий вход привода 16 подъемной лебедки 4 подключен к выходу первого управляющего блока 17, вход которого подключен к первому задатчику 18. Управляющий вход привода 19 амортизирующего устройства 7 подключен к выходу второго управляющего блока 20, первый вход которого подключен ко второму задатчику 21. Устройство содержит также измерительные преобразователи 22 и 23 перемещения и скорости перемещения подъемно-опускной стрелы 8 относительно стойки 10 (относительно основания амортизирующего устройства), дифференцирующий фильтр 24 и компаратор 25. Измерительные преобразователи 22 и 23 подключены соответственно ко второму и к третьему входам управляющего блока 20. Вход и выход дифференцирующего фильтра 24 подключены соответственно к выходу измерительного преобразователя 23 скорости перемещения подвижного элемента и к четвертому входу второго управляющего блока 20. Выход компаратора 25 подключен к пятому входу второго управляющего блока 20, а первый и второй входы компаратора подключены соответственно к входу и выходу дифференцирующего фильтра 24.
Судовое спускоподъемное устройство работает следующим образом.
Основное перемещение подводного объекта (опускание на поверхность воды, выход на заданную глубину погружения, подъем на судно) осуществляют путем сматывания или наматывания кабель-троса 6 с барабана 5 судовой подъемной лебедки 4 под действием привода 16 этой лебедки со скоростью, заданной задатчиком 18. Заданное значение скорости поступает на управляющий вход привода 16 через первый управляющий блок 17.
Привод 19 амортизирующего устройства 7 с задатчиком 21 среднего значения угла наклона подъемно-опускной стрелы 8, управляющим блоком 20, дифференцирующим фильтром 24, компаратором 25 и измерительными преобразователями 22 (перемещения - угла наклона) и 23 (скорости перемещения - угловой скорости) стрелы 8 образует САУ моментом привода 19 (моментом стрелы 8).
Управляющий блок 20 поддерживает среднее значение угла наклона стрелы 8, равным заданному, при изменении длины вытравленной части кабель-троса и веса подводного объекта 2. (Указанный вес может измениться как при погружении подводного объекта 2 в воду, так и при подъеме какого-либо предмета с морского дна с помощью манипулятора, установленного на этом объекте.) Указанное постоянство среднего значения угла наклона стрелы 8 обеспечивается благодаря наличию в выходном сигнале этого блока двух составляющих. Первая составляющая зависит от разности значений угла наклона стрелы: заданного задатчиком 21 и измеренного преобразователем 22. Вторая составляющая пропорциональна интегралу от указанной разности. Изменение заданного значения угла наклона стрелы производится с целью изменения вылета стрелы 8. Это необходимо при подъеме подводного объекта 2 с палубы судна-носителя 3 с последующим опусканием этого объекта за борт судна-носителя 3, а также при выполнении обратной операции - подъеме подводного объекта 2 из воды и установке его на палубу судна-носителя 3.
При нахождении объекта 2 под водой средний угол наклона стрелы по отношению к плоскости ватерлинии судна-носителя 3 равен нулю. При изменении скорости подъемной лебедки 4 или под действием качки судна-носителя 3 на морском волнении в кабель-тросе 6 возникают продольные механические колебания, вызывающие переменные усилия, которые, воздействуя через блок 14 на стрелу 6, изменяют момент нагрузки привода 19 амортизирующего устройства 7. При перемещении вместе с судном-носителем 3 оси 9 стрелы 8 вверх головной блок 14 стрелы 8 опускается и, наоборот, этот блок поднимается при перемещении оси 9 вниз. Тем самым уменьшается размах изменения момента стрелы 8 и перемещения подводного объекта 2. Минимизация этих перемещений обеспечивается тем, что момент привода 19 амортизирующего устройства 7 помимо указанных выше двух составляющих, первой и второй, содержит еще две. Третья составляющая пропорциональна угловой скорости стрелы, то есть сигналу, получаемому с выхода измерительного преобразователя 23, а четвертая составляющая - угловому ускорению стрелы 8, то есть сигналу, получаемому с выхода дифференцирующего фильтра 24. При этом передаточная функция, определяющая отношение изображений по Лапласу перемещений оси блока 14 стрелы 8 и оси 9 блока 12 (перемещений судна-носителя) является передаточной функцией режекторного фильтра. Коэффициенты передачи каждой из четырех составляющих выбираются так, чтобы минимум частотной характеристики, соответствующей указанной передаточной функции, соответствовал максимуму спектральной плотности вертикальной качки оси 9 при максимальной степени такого морского волнения, при котором еще возможна работа спускоподъемного устройства 1. Таким способом обеспечивают компенсацию влияния качки судна-носителя 3 на глубину погружения подводного объекта 2, удержание его на взволнованной поверхности воды и устраняют появление слабины и рывков в кабель-тросе 6.
На вход компаратора 25 подаются два сигнала. Один из них, пропорциональный угловой скорости стрелы 8, поступает с выхода измерительного преобразователя 23, а другой, пропорциональный угловому ускорению, - с выхода дифференцирующего фильтра 24. Компаратор срабатывает и изменяет знак своего выходного сигнала, имеющего постоянное абсолютное значение, на некоторое время τ раньше, чем угловая скорость стрелы достигнет нулевого значения. Коэффициенты пропорциональности сигналов угловой скорости и углового запаздывания выбираются такими, чтобы τ равнялось времени запаздывания в САУ моментом стрелы 8. Поэтому практически одновременно с изменением направления скорости стрелы 8 момент двигателя и приведенный к его валу суммарный момент потерь скачком изменяются на одно и то же значение, причем направления приращений этих моментов противоположно. Этим способом исключаются дополнительные изменения глубины погружения подводного объекта, вызванные нелинейностью статической механической характеристики двигателя амортизирующего устройства.
При остановленной подъемной лебедке и наличии перемещений стрелы 8, которые компенсируют влияние качки судна, головной 14 и дополнительный 15 блоки стрелы 8 практически не вращаются относительно своих осей. Возникающие при этом изгибные деформации кабель-троса в местах его подхода к блоку 15 и схода с блока 14 незначительны и мало влияют на износ кабель-троса, что выгодно отличает предлагаемое устройство от его аналогов.
Таким образом, применение заявленного устройства повышает эффективность использования подводного объекта при нахождении его под водой в условиях развитого морского волнения.
Источники информации
1. Авторское свидетельство СССР №559350, кл. Н02Р 5/06, В63В 27/08. Устройство для управления электродвигателем судовой лебедки. /Кувшинов Г.Е., Урываев К.П.//1977, БИ №19.
2. Авторское свидетельство СССР №714606, кл. Н02Р 5/06. Устройство для управления электродвигателем судовой лебедки. /Кувшинов Г.Е., Урываев К.П.//1980, БИ №5.
3. Патент РФ №2114756, В63В 27/08. Спускоподъемное устройство/ Г.Е. Кувшинов, К.В. Подкорытова// 1998, БИ №19 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГЛУБИНОЙ ПОГРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2261191C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2590801C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2584351C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| СПУСКОПОДЪЁМНОЕ УСТРОЙСТВО | 2015 |
|
RU2585181C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
Изобретение относится к судовой технике. Спускоподъемное устройство содержит установленную на судне-носителе подъемную лебедку, амортизирующее устройство с подъемно-опускной стрелой, блоки управления и обратной связи. Подъемно-опускная стрела имеет привод от электродвигателя. При нахождении объекта под водой стрела амортизирующего устройства совершает движения, противоположно направленные перемещению судна, вызванного качкой. Инерция амортизирующего устройства компенсируется скачкообразным приращением приведенного к валу электродвигателя момента при изменении направления движения судна. Достигается стабилизации глубины погружения объекта во время качки. 2 ил.
Спускоподъемное устройство, содержащее установленную на судне подъемную лебедку, кабель-трос, один конец которого заведен на барабан подъемной лебедки, а другой прикреплен к подводному объекту, и амортизирующее устройство, подвижный элемент которого контактирует с кабель-тросом, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу привода подъемной лебедки, и второй управляющий блок, выход которого подключен к управляющему входу привода подвижного элемента амортизирующего устройства, первый вход второго управляющего блока связан со вторым задатчиком, а второй и третий входы этого блока подключены соответственно к выходам измерительных преобразователей перемещения и скорости перемещения подвижного элемента амортизирующего устройства относительно основания этого устройства, отличающееся тем, что в него введены компаратор и дифференцирующий фильтр, вход и выход которого подключены соответственно к выходу измерительного преобразователя скорости перемещения подвижного элемента и к четвертому входу второго управляющего блока, а амортизирующее устройство установлено на судне, подвижный элемент этого устройства представляет собой подъемно-опускную стрелу, на оси крепления которой, закрепленной в стойке амортизирующего устройства и расположенной в плоскости, параллельной плоскости ватерлинии судна, свободно насажен дополнительный блок, который вместе с головным блоком подъемно-опускной стрелы охвачен кабель-тросом, выход компаратора подключен к пятому входу второго управляющего блока, а первый и второй входы компаратора подключены соответственно к входу и выходу дифференцирующего фильтра.
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| US 2005242332 A1, 03.11.2005 | |||
| JP 9081202 A, 28.03.1997 | |||
| Механизированная крепь для крутых пластов | 1987 |
|
SU1511428A1 |

