Изобретение относится к судовой технике, а именно к тем судовым спускоподъемным устройствам (СПУ), которые выполняют операции спуска и подъема подводных объектов (ПО), преимущественно подводных зарядных станций (ПЗС), предназначенных для зарядки под водой электрических аккумуляторных батарей, установленных на автономных необитаемых подводных аппаратах (АНПА).
Известно СПУ, содержащее установленную на судне подъемную лебедку с устройством управления приводом этой лебедки, трос, один конец которого заведен на барабан подъемной лебедки, а другой прикреплен к подводному объекту, а также задатчик и измеритель скорости троса, акселерометр, подвешенный к оси грузового блока лебедки, и интегрирующий фильтр. Входы устройства управления приводом подъемной лебедки подключены к выходам задатчика и измерителя скорости троса, а также к выходу интегрирующего фильтра, вход которого соединен с выходом акселерометра (United States Patent Application Publication, Pub. No.: 2005/0242332. / Shuji Ueki, Hirohumi Doi, Shogo Miyajima, Kenzo Hasegava, Hiroshi Satoh. Pub. Date: Jul. 2, 2009. ([0007]-[0009], Fig. 4 - аналог)). При отсутствии качки судна устройство управления воздействует на привод лебедки по принципу отрицательной обратной связи так, чтобы разность выходных сигналов задатчика и измерителя скорости троса равнялась нулю. При этом скорость, с которой трос уходит в воду, равна заданной скорости. При наличии качки акселерометр измеряет вертикальную составляющую ускорения качки оси грузового блока лебедки, а выходной сигнал интегрирующего фильтра пропорционален вертикальной составляющей скорости качки оси грузового блока лебедки. Этот сигнал вычитается из задающего сигнала. Поэтому скорость перемещения троса относительно судна равна разности скоростей: заданной и качки, а по отношению к невзволнованной поверхности воды скорость троса практически равна заданной скорости. Тем самым происходит компенсация влияния качки судна на скорость перемещения подводного объекта при вертикальном направлении схода троса с грузового блока под воду.
У этого известного устройства имеются следующие недостатки:
Во-первых, компенсация скорости, с которой перемещается ось грузового блока лебедки при качке судна, является неполной, когда судно находится в дрейфе, или на подводный объект действует течение. По этим причинам направление схода троса с грузового блока под воду отличается от вертикали.
Во-вторых, подвешенный акселерометр раскачивается под действием других, кроме вертикальной, видов качки. При этом возникают две дополнительные погрешности измерения ускорения. Первая из них вызвана отклонением оси акселерометра от вертикали. Вторая погрешность связана с тем, что акселерометр, подвешенный к оси грузового блока лебедки, измеряет не только ускорение качки, но и центробежное ускорение, вызванное его качанием вокруг оси подвеса.
Третий недостаток заключается в том, что в процессе компенсации влияния качки судна-носителя при малой или нулевой заданной скорости происходит непрерывное сматывание-наматывание троса на барабан лебедки. Такое движение троса сопровождается его изгибными деформациями при прохождении блоков лебедки. Медные жилы кабель-троса допускают всего 1000-2000 изгибов при прохождении через блоки. Этот ресурс может быть израсходован за несколько часов непрерывной работы лебедки. Поэтому аналог можно использовать только в том случае, когда судно и подводный объект связаны не кабель-тросом, а простым тросом (канатом), что исключает возможность передачи электроэнергии на подводный объект, например на ПЗС.
Четвертый недостаток - это неспособность аналога удерживать подводный объект на постоянной глубине в автоматическом режиме. Глубина погружения подводного объекта определяется средним по времени значением длины троса, смотанного с барабана лебедки. Как глубина погружения, так и длина троса в системе автоматического управления аналога являются ненаблюдаемыми величинами. Поэтому даже при заданном с задатчика нулевом значении скорости троса и идеальной работе акселерометра и интегрирующего фильтра глубина погружения подводного объекта будет непрерывно изменяться. Одним из факторов такого поведения системы автоматического управления скоростью лебедки является вес троса. При подъеме грузового блока под действием качки судна длина участка троса, находящегося между грузовым блоком и подводным объектом, под действием сигнала интегрирующего фильтра увеличится. Появится дополнительное усилие в тросе, вызванное приращением веса указанной части троса. Это усилие будет препятствовать полному возвращению смотанного участка троса обратно на барабан лебедки во время опускания грузового блока. Без вмешательства оператора с барабана лебедки постепенно сойдет весь трос и подводный объект окажется на максимальной глубине.
Наиболее близким по технической сущности к заявленному устройству является выбранное в качестве прототипа СПУ, которое лишено указанных недостатков аналога (Патент RU 2513343 С2. Спускоподъемное устройство / Кувшинов Г.Е., Наумов Л.А., Чупина К.В., Радченко Д.В., Чепурин П.И. - Опубликовано 20.04.2014 Бюл. №11).
СПУ содержит установленный на судне снабженный приводом механизм подъема, тяговый орган которого связан с подводным объектом, внутрь которого введен подводный аппарат для зарядки под водой аккумуляторов этого аппарата, первый командный блок и кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект. Этот объект входит в состав системы автоматической компенсации влияния качки судна на глубину погружения подводного объекта совместно с тяговым органом, приводом и передачей компенсаторного устройства, вторым командным блоком, управляющим блоком, акселерометром, первым и вторым интегрирующими фильтрами, компаратором, измерительными преобразователями перемещения и скорости перемещения исполнительного органа компенсаторного устройства относительно несущей конструкции. Причем указанная передача компенсаторного устройства прикреплена к установленной на судне несущей конструкции, а акселерометр установлен на судне в районе расположения механизма подъема так, что направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна. При этом указанная система автоматической компенсации выполняет управление по следующим видам возмущения: по качке судна, скорости и ускорению этой качки. Первый командный блок связан с управляющим входом привода механизма подъема. Выход управляющего блока подключен к управляющему входу привода компенсаторного устройства. К четырем входам управляющего блока подключены соответственно следующие выходы: к первому входу - выход второго командного блока, ко второму входу - выход акселерометра, к третьему входу - выход первого интегрирующего фильтра, к четвертому входу - выход второго интегрирующего фильтра. Пятый и шестой входы управляющего блока связаны соответственно с выходами измерительных преобразователей перемещения и скорости перемещения исполнительного органа компенсаторного устройства. К седьмому входу управляющего блока подключен выход компаратора, первый и второй входы которого подключены соответственно к выходам второго командного блока и второго интегрирующего фильтра. Вход этого фильтра подключен к выходу первого интегрирующего фильтра, у которого вход подключен к выходу акселерометра. Третий вход компаратора связан с выходом упомянутого измерительного преобразователя перемещения.
У прототипа как механизм подъема, так и компенсаторное устройство снабжены своими индивидуальными приводами. Механизмом подъема является подъемная лебедка, а тяговым органом - ее трос. Подвижным элементом компенсаторного устройства служит сопряженная с указанными выше приводом и передачей компенсаторного устройства подъемно-опускная рама.
Она установлена на подшипниках, закрепленных в установленной на судне опоре компенсаторного устройства.
Кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, к которому прикреплен нижний конец этого кабеля, заведен на барабан кабельной лебедки. Указанная лебедка, поддерживающая постоянство усилия натяжения кабеля, снабжена двигательным устройством ее привода и устройством для соединения токоведущих жил на верхнем конце упомянутого кабеля с судовой электроэнергетической системой.
Прототип также содержит ряд не упомянутых выше компонентов, входящих в системы управления устройства:
- второй управляющий блок, через который первый командный блок соединен с управляющим входом привода механизма подъема;
- третий командный блок и третий управляющий блок, вход которого подключен к выходу третьего командного блока, а выход - к управляющему входу двигательного устройства привода кабельной лебедки.
Другие из не упомянутых выше компонентов входят в механическую часть устройства:
- прикрепленный к первому краю подъемно-опускной рамы противовес, установленные на оси этой рамы первый, второй и третий направляющие блоки;
- прикрепленные ко второму краю подъемно-опускной рамы первый, второй и третий грузовые блоки;
- расположенные на подводном объекте первый и второй уравнительные блоки.
Трос огибает последовательно первый направляющий, первый грузовой, первый и второй уравнительные, второй грузовой и второй направляющие блоки. Концы троса заведены на барабан подъемной лебедки, причем при вращении барабана ветви троса навиваются на него симметрично и одновременно. Кабель по пути к подводному объекту огибает третий направляющий и третий грузовой блоки.
Когда ПЗС находится на заданной глубине, подъемная лебедка не работает. Поперечная качка судна сопровождается вращением уравнительных блоков, при этом продольная качка зарядной станции отсутствует. Привод подъемно-опускной рамы вместе с акселерометром и двумя интегрирующими фильтрами, которые измеряют ускорение, скорость и перемещение оси крепления этой рамы, образует систему автоматического управления углом ее наклона. При нахождении зарядной станции под водой подъемно-опускная рама совершает движения, противоположно направленные перемещению судна, вызванному его вертикальной качкой. Повышение быстродействия компенсаторного устройства обеспечивается дополнительным регулированием по возмущению: положению, скорости и ускорению оси крепления подъемно-опускной рамы. Достигается стабилизация глубины погружения объекта во время качки.
Кабельная лебедка обеспечивает постоянство усилия в электрическом кабеле, передающем электроэнергию от судовой электроэнергетической системы на зарядную станцию, что исключает обрыв кабеля при спуске зарядной станции и образование слабины кабеля при ее подъеме.
К подъемно-опускной раме прикреплен противовес, позволяющий снизить расчетную мощность, массу и стоимость двигателя, а также приводного механизма компенсаторного устройства
Прототипу присущи три основных недостатка:
1. Повышенная сложность устройства, что проявляется в больших значениях его стоимости и массы: СПУ содержит три двигателя, два тяговых органа, по три командных и управляющих блока, несколько грузовых, направляющих и уравнительных механических блоков.
2. Большая мощность двигателя привода подвижного элемента компенсаторного устройства, которому приходится преодолевать момент инерции громоздкой подъемно-опускной рамы и противовеса.
3. Наличие погрешности компенсации влияния качки судна, которая обусловлена тем, что перпендикулярные плоскости ватерлинии судна линии, проходящие через точку крепления акселерометра и через две точки, проходящие через середины осей грузовых блоков, отстоят одна от другой на значительные расстояния, определяемые размерами подъемно-опускной рамы. Поэтому ускорения качки судна для двух последних точек, действующие на систему автоматического управления компенсацией качки судна, как возмущающие воздействия, не равны ускорению качки судна, измеренному акселерометром.
Задачей, на решение которой направлено предлагаемое изобретение, является улучшение технико-экономических показателей спускоподъемного устройства, которое выполняет операции спуска и подъема ПЗС.
Решение поставленной задачи достигается тем, что в спускоподъемное устройство, содержащее установленный на судне снабженный приводом механизм подъема, тяговый орган которого связан с подводным объектом, внутрь которого введен подводный аппарат для зарядки под водой аккумуляторов этого аппарата, первый командный блок и кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, входящий в состав системы автоматической компенсации влияния качки судна на глубину погружения подводного объекта совместно с тяговым органом, приводом и передачей компенсаторного устройства, которая прикреплена к установленной на судне несущей конструкции, вторым командным блоком, управляющим блоком, акселерометром, установленным на судне в районе расположения механизма подъема так, что направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна, первым и вторым интегрирующими фильтрами, компаратором, измерительными преобразователями перемещения и скорости перемещения исполнительного органа компенсаторного устройства относительно несущей конструкции, при этом указанная система автоматической компенсации выполняет управление по следующим видам возмущения: по качке судна, скорости и ускорению этой качки, причем первый командный блок связан с управляющим входом привода механизм подъема, выход управляющего блока подключен к управляющему входу привода компенсаторного устройства, а к четырем входам управляющего блока подключены соответственно следующие выходы: к первому входу - выход второго командного блока, ко второму входу - выход акселерометра, к третьему входу - выход первого интегрирующего фильтра, к четвертому входу - выход второго интегрирующего фильтра, пятый и шестой входы управляющего блока связаны соответственно с выходами измерительных преобразователей перемещения и скорости перемещения исполнительного органа компенсаторного устройства, к седьмому входу управляющего блока подключен выход компаратора, первый и второй входы которого подключены соответственно к выходам второго командного блока, и второго интегрирующего фильтра, вход которого подключен к выходу первого интегрирующего фильтра, у которого вход подключен к выходу акселерометра, а третий вход компаратора связан с выходом упомянутого измерительного преобразователя перемещения, дополнительно введены преобразователь вращательного движения привода компенсаторного устройства в изменение длины тягового органа, карданный механизм, функциональный преобразователь, а также первый и второй умножители; компенсаторное устройство выполняет также функции механизма подъема, а привод компенсаторного устройства - функции привода механизма подъема; тяговый орган выполнен как у выжимного рычажного подъемника, содержащего первую и вторую идентичные сопряженные рычажные системы (первые и вторые нюрнбергские ножницы), каждая из которых состоит из одинакового числа n секций, составленных из 2n рычагов с одинаковой полудлиной l, через середины каждой пары рычагов каждой секции проходят оси, образуя при этом центральные шарниры, а рычажные системы расположены симметрично относительно осевой линии подъемника, верхние концы верхней секции первой рычажной системы образуют первые верхние левый и правый с двумя первыми верхними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними первой верхней направляющей, а верхние концы верхней секции второй рычажной системы образуют вторые верхние левый и правый шарниры с двумя вторыми верхними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними второй верхней направляющей, нижние же концы нижней секции первой рычажной системы образуют первые нижние левый и правый шарниры с двумя первыми нижними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними первой нижней направляющей, а концы нижней секции второй рычажной системы образуют вторые нижние левый и правый шарниры с двумя вторыми нижними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними второй нижней направляющей, причем нижние направляющие размещены в нижнем блоке подъемника, который прикреплен к подводному объекту так, что продольные оси этих направляющих параллельны продольной оси подводного объекта, вдоль которой вводят внутрь этого объекта подводный аппарат для зарядки его аккумуляторов, верхние направляющие совместно с верхними первыми и вторыми левыми и правыми каретками, которые являются исполнительным органом компенсаторного устройства, и преобразователем вращательного движения привода компенсаторного устройства в изменение длины тягового органа, что достигается благодаря поступательному движению верхних кареток, установленных в приводной блок подъемника, образуя передачу компенсаторного устройства, при этом продольные оси верхних направляющих параллельны продольным осям нижних направляющих, а передача компенсаторного устройства обеспечивает равенство расстояний между осями шарниров всех четырех верхних кареток и плоскостью, которая проходит через осевую линию подъемника и перпендикулярна осевым линиям верхних и нижних направляющих, во всем диапазоне изменения этих расстояний, при этом ось входного вала передачи компенсаторного устройства совпадает с осевой линией подъемника, несущая конструкция выполнена в виде установленной на судне рамы, к которой прикреплен приводной блок подъемника с использованием независимой подвески четырех точек, расположенных на периферии верхней наружной поверхности этого блока на равных расстояниях от осевой линии подъемника, а между расположенными в нижней части наружной боковой поверхности этого блока точками и рамой несущей конструкции установлены демпфирующие амортизаторы, которые вместе с амортизаторами подвески демпфируют вызванные качкой судна перемещения приводного блока относительно указанной рамы, параметры всех перечисленных амортизаторов настраивают так, чтобы при отсутствии качки, крена и дифферента судна направление осевой линии подъемника было бы перпендикулярным к плоскости судовой ватерлинии, привод механизма подъема и акселерометр, установленный в непосредственной близости от выходного вала привода механизма подъема, прикреплены к раме несущей конструкции над приводным блоком подъемника так, что осевая линия выходного вала этого привода, при отсутствии качки, крена и дифферента судна, совпадает с осевой линией подъемника, а направление измеряемого акселерометром ускорения параллельно этой линии, выходной вал привода механизма подъема соединен с входным валом передачи компенсаторного устройства через карданный механизм, вход функционального преобразователя, выходной сигнал которого пропорционален длине тягового органа, подключен к выходу измерительного преобразователя перемещения исполнительного органа компенсаторного устройства, а выход этого преобразователя подключен к первым входам первого и второго умножителей, выходы которых подключены соответственно к пятому и шестому входам управляющего блока, кроме того, выход первого умножителя подключен к третьему входу компаратора, а вторые входы первого и второго умножителей подключены соответственно к выходам измерительных преобразователей перемещения и скорости перемещения исполнительного органа компенсаторного устройства, выход первого командного блока подключен к восьмому входу управляющего блока и к четвертому входу компаратора.
Решение поставленной задачи достигается также тем, что кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, протянут вдоль последовательно соединенных шарнирами рычагов одной из рычажных систем и прикреплен к этим рычагам в точках, распределенных по их длине, исключая участки рычагов, прилегающих к указанным шарнирам.
Решение поставленной задачи достигается также тем, что рама несущей конструкции установлена на палубе судна так, что спуск и подъем подводного объекта с помещенным в нем подводным аппаратом производится через сквозную шахту, выполненную в корпусе судна в направлении, перпендикулярном плоскости ватерлинии.
Решение поставленной задачи достигается также тем, что в качестве судна, несущего устройство, используется катамаран, причем устройство установлено на его палубе так, что продольная ось подъемника устройства проходит в непосредственно близости от центра масс катамарана.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи:
Признаки: «…в спускоподъемное устройство дополнительно введены преобразователь вращательного движения привода компенсаторного устройства в изменение длины тягового органа,… компенсаторное устройство выполняет также функции механизма подъема, а привод компенсаторного устройства - функции привода механизма подъема; тяговый орган выполнен как у выжимного рычажного подъемника, содержащего первую и вторую идентичные сопряженные рычажные системы (первые и вторые нюрнбергские ножницы), каждая из которых состоит из одинакового числа n секций, составленных из 2n рычагов с одинаковой полудлиной l, через середины каждой пары рычагов каждой секции проходят оси, образуя при этом центральные шарниры, а рычажные системы расположены симметрично относительно осевой линии подъемника, верхние концы верхней секции первой рычажной системы образуют первые верхние левый и правый шарниры с двумя первыми верхними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними первой верхней направляющей, а верхние концы верхней секции второй рычажной системы образуют вторые верхние левый и правый шарниры с двумя вторыми верхними левой и правой каретками с возможностью их перемещения вдоль сопряженной с ними второй верхней направляющей, нижние же концы нижней секции первой рычажной системы образуют первые нижние левый и правый шарниры с двумя первыми нижними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними первой нижней направляющей, а концы нижней секции второй рычажной системы образуют вторые нижние левый и правый шарниры с двумя вторыми нижними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними второй нижней направляющей,
причем нижние направляющие размещены в нижнем блоке подъемника, который прикреплен к подводному объекту так, что продольные оси этих направляющих параллельны продольной оси подводного объекта, вдоль которой вводят внутрь этого объекта подводный аппарат для зарядки его аккумуляторов,
верхние направляющие совместно с верхними первыми и вторыми левыми и правыми каретками, которые являются исполнительным органом компенсаторного устройства, и преобразователем вращательного движения привода компенсаторного устройства в изменение длины тягового органа, что достигается благодаря поступательному движению верхних кареток, установленных в приводной блок подъемника, образуя передачу компенсаторного устройства, при этом продольные оси верхних направляющих параллельны продольным осям нижних направляющих, а передача компенсаторного устройства обеспечивает равенство расстояний между осями шарниров всех четырех верхних кареток и плоскостью, которая проходит через осевую линию подъемника и перпендикулярна осевым линиям верхних и нижних направляющих, во всем диапазоне изменения этих расстояний, при этом ось входного вала передачи компенсаторного устройства совпадает с осевой линией подъемника,…» обеспечивают снижение массы и стоимости спускоподъемного устройства за счет того, что функции подъема и компенсации выполняет тяговый орган с одним приводом, двумя командными и одним управляющим блоками, а также снижение мощности двигателя привода из-за отсутствия необходимости преодолевать момент инерции громоздкой подъемно-опускной рамы и противовеса.
Признаки: «…в спускоподъемное устройство дополнительно введены функциональный преобразователь, а также первый и второй умножители,…», «…привод механизма подъема и акселерометр, установленный в непосредственной близости от выходного вала привода механизма подъема, прикреплены к раме несущей конструкции над приводным блоком подъемника так, что осевая линия выходного вала этого привода, при отсутствии качки, крена и дифферента судна, совпадает с осевой линией подъемника, а направление измеряемого акселерометром ускорения параллельно этой линии,…» и «…вход функционального преобразователя, выходной сигнал которого пропорционален длине тягового органа, подключен к выходу измерительного преобразователя перемещения исполнительного органа компенсаторного устройства, а выход этого преобразователя подключен к первым входам первого и второго умножителей, выходы которых подключены соответственно к пятому и шестому входам управляющего блока, кроме того, выход первого умножителя подключен к третьему входу компаратора, а вторые входы первого и второго умножителей подключены соответственно к выходам измерительных преобразователей перемещения и скорости перемещения исполнительного органа компенсаторного устройства,… выход первого командного блока подключен… к четвертому входу компаратора» обеспечивают практическое равенство между собой трех пар механических величин:
изменения длины тягового органа и вызванного качкой судна изменения перемещения точки подвеса тягового органа вдоль осевой линии акселерометра,
скорости изменения длины тягового органа и вызванной качкой судна скорости, с которой изменяется перемещение точки подвеса тягового органа вдоль осевой линии акселерометра;
ускорения изменения длины тягового органа и вызванного качкой судна ускорения, с которым изменяется перемещение точки подвеса тягового органа вдоль осевой линии акселерометра.
Тем самым перечисленные признаки повышают точность компенсации влияния качки судна на глубину погружения подводного объекта.
Признак «выход первого командного блока подключен к восьмому входу управляющего блока» обеспечивает задание среднего значения длины тягового органа, которое соответствует заданной глубине погружения подводного объекта. Изменение длины тягового органа относительно заданного среднего значения его длины производится системой автоматической компенсации влияния качки судна.
Признак «…привод механизма подъема и акселерометр, установленный в непосредственной близости от выходного вала привода механизма подъема, прикреплены к раме несущей конструкции над приводным блоком подъемника так, что осевая линия выходного вала этого привода, при отсутствии качки, крена и дифферента судна, совпадает с осевой линией подъемника, а направление измеряемого акселерометром ускорения параллельно этой линии…», повышает точность компенсации возмущающего воздействия качки судна на глубину погружения подводного объекта за счет практического равенства ускорения, измеренного акселерометром, и той составляющей ускорения точки подвеса тягового органа, которая направлена вдоль оси чувствительности акселерометра.
Признаки «…несущая конструкция выполнена в виде установленной на судне рамы, к которой прикреплен приводной блок подъемника с использованием независимой подвески четырех точек, расположенных на периферии верхней наружной поверхности этого блока на равных расстояниях от осевой линии подъемника, а между расположенными в нижней части наружной боковой поверхности этого блока точками и рамой несущей конструкции установлены демпфирующие амортизаторы, которые вместе с амортизаторами подвески демпфируют вызванные качкой судна перемещения приводного блока относительно указанной рамы, причем параметры всех перечисленных амортизаторов настраиваются так, чтобы при отсутствии качки, крена и дифферента судна направление осевой линии подъемника было бы перпендикулярным к плоскости судовой ватерлинии,…» и «…выходной вал привода механизма подъема соединен с входным валом передачи компенсаторного устройства через карданный механизм…» обеспечивают уменьшение влияния тех перемещений точки подвеса тягового органа, которые вызваны бортовой и килевой составляющими качки судна, на пространственное расположение подводного объекта.
Признак «…кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, протянут вдоль последовательно соединенных шарнирами рычагов одной из рычажных систем и прикреплен к этим рычагам в точках, распределенных по их длине, исключая участки рычагов, прилегающих к указанным шарнирам» исключает необходимость в кабельной лебедке с системой автоматического поддержания постоянства его натяжения, что также упрощает спускоподъемное устройство и снижает его массу и стоимость.
Признак «…рама несущей конструкции установлена на палубе судна так, что спуск и подъем подводного объекта с помещенным в нем подводным аппаратом производится через сквозную шахту, выполненную в корпусе судна в направлении, перпендикулярном плоскости ватерлинии» дает возможность установки рамы несущей конструкции в непосредственной близости от центра масс судна, что обеспечивает уменьшение действующих на точку подвеса тягового органа бортовой и килевой составляющих качки судна.
Признак «…в качестве судна, несущего устройство, используется катамаран, причем устройство установлено на его палубе так, что продольная ось подъемника устройства проходит в непосредственной близости от центра масс катамарана» позволяет снизить бортовую качку судна и обеспечивает уменьшение действующих на точку подвеса тягового органа бортовой и килевой составляющих качки катамарана.
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые испрашивается правовая охрана. Именно такая совокупность существенных признаков заявленного СПУ позволила получить технический результат, который выражается в следующем:
повышается надежность и снижаются масса и стоимость спускоподъемного устройства за счет того, что функции подъема и компенсации выполняет тяговый орган с одним приводом, а способ крепления кабеля для передачи электроэнергии на подводный объект устраняет необходимость применения дополнительной кабельной лебедки с системой автоматического поддержания постоянства его натяжения;
снижается влияние возмущающего воздействия килевой и бортовой качки на глубину погружения подводного объекта, повышается точность работы системы автоматического управления по компенсации влияния вертикальной качки на глубину погружения подводного объекта.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Следовательно, заявленное изобретение является новым, обладает изобретательным уровнем и пригодно для использования.
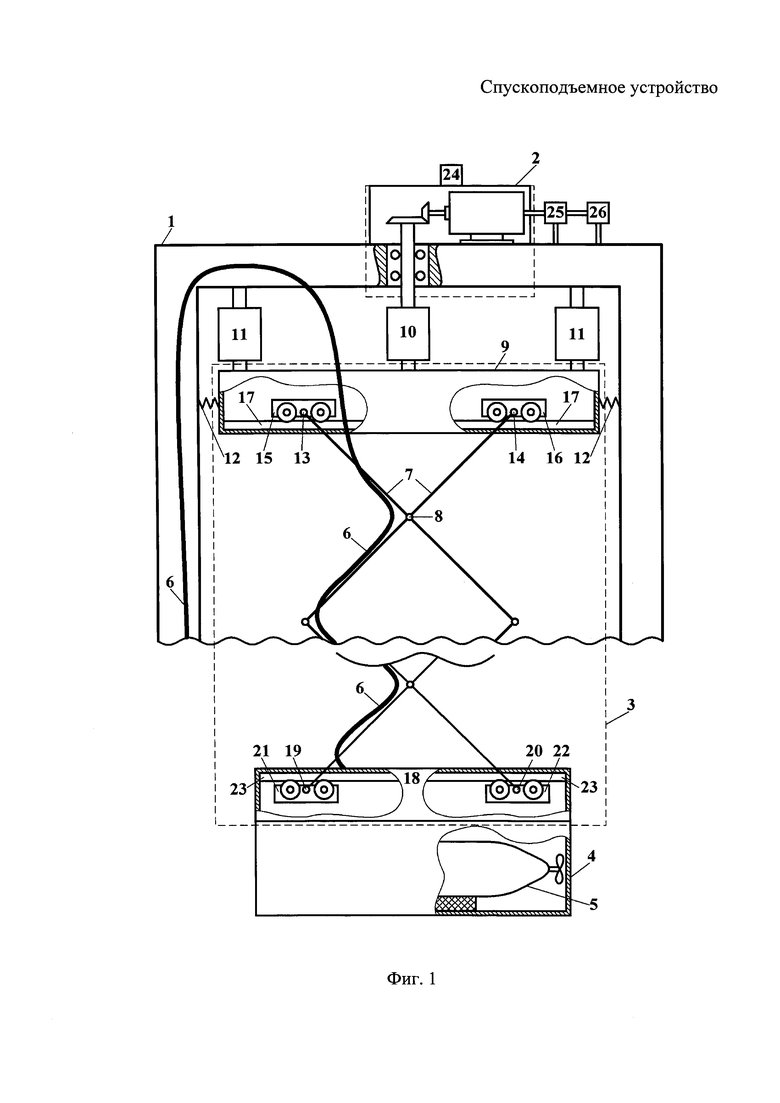
Сущность изобретения поясняется чертежами, где на фиг. 1 и фиг. 2 представлено расположение элементов СПУ в виде изображений на фронтальной (фиг. 1) и боковой (фиг. 2) плоскостях проекций. На фиг. 3 изображена структурная схема системы автоматического управления.
На фиг. 1 и 2 показано СПУ, содержащее раму 1 несущей конструкции, установленную на палубе судна, прикрепленный к этой раме привод 2 механизма подъема, который с помощью тягового органа 3 осуществляет перемещение подводного объекта 4, выполняющего функции ПЗС, предназначенной для зарядки аккумуляторов АНПА 5. На фиг. 1 ПЗС 4 находится на заданной глубине его погружения, а на фиг. 2 - в крайнем верхнем положении.
Кабель 6, передающий электроэнергию от судовой электроэнергетической системы на ПЗС 4, протянут вдоль последовательно соединенных шарнирами рычагов 7 одной из двух рычажных систем тягового органа 3. Кабель 6 прикреплен к рычагам 7 в точках, распределенных по их длине, исключая участки рычагов, прилегающих к шарнирам, соединяющим эти рычаги.
Тяговый орган 3 выполнен, как у выжимного рычажного подъемника, содержащего первую и вторую идентичные сопряженные рычажные системы, состоящие из рычагов 7 (первые и вторые нюрнбергские ножницы). Каждая из рычажных систем состоит из одинакового числа n секций, составленных из 2n рычагов, имеющих одинаковую полудлину l. Через середины каждой пары рычагов каждой секции проходят оси, образуя при этом центральные шарниры 8. Рычажные системы расположены симметрично относительно осевой линии подъемника, как показано на фиг. 2.
Передача компенсаторного устройства, которая преобразует вращательное движение выходного вала привода механизма подъема в изменение длины тягового органа, размещена в приводном блоке 9 рычажного подъемника. Привод механизма подъема 2 прикреплен к раме 1 несущей конструкции над приводным блоком 9 рычажного подъемника так, что осевая линия выходного вала этого привода, при отсутствии качки, крена и дифферента судна, совпадает с осевой линией подъемника. Входной вал приводного блока 9 соединен с выходным валом привода 2 механизма подъема через карданный механизм 10. Приводной блок 9 подвешен к раме 1 несущей конструкции с помощью амортизаторов 11 независимой подвески, которые прикреплены к блоку 9 в четырех точках, расположенных на периферии верхней наружной поверхности этого блока на равных расстояниях от осевой линии подъемника. Расположенные в нижней части точки наружной боковой поверхности блока 9 соединены с рамой 1 несущей конструкции с помощью демпфирующих амортизаторов 12. Параметры всех указанных амортизаторов настраивают так, чтобы при отсутствии качки, крена и дифферента судна направление осевой линии подъемника было бы перпендикулярным к плоскости судовой ватерлинии.
Верхние концы верхней секции первой рычажной системы образуют первые верхние левый 13 и правый 14 шарниры с двумя первыми верхними левой 15 и правой 16 каретками, которые могут перемещаться только вдоль сопряженной с ними первой верхней направляющей 17. Верхние концы верхней секции второй рычажной системы образуют вторые верхние левый и правый шарниры с двумя вторыми верхними левой и правой каретками, которые могут перемещаться только вдоль сопряженной с ними второй верхней направляющей. Все четыре указанные каретки соединены с входным валом приводного блока 9 через преобразователь вращательного движения привода компенсаторного устройства в поступательное движение кареток. Эти каретки совместно с указанным преобразователем образуют исполнительный орган компенсаторного устройства, которое осуществляет изменение длины тягового органа 3.
Тяговый орган 3 соединен с подводным объектом 4 с помощью нижнего блока 18 рычажного подъемника, который близок по составу и конструкции к приводному блоку 9 этого подъемника. В состав нижнего блока 18 входят относящиеся к первой и второй рычажным системам первый и второй нижние левый 19 и правый 20 шарниры, а также первая и вторая нижние левая 21 и правая 22 каретки, которые могут перемещаться только вдоль сопряженных с ними первой и второй нижних направляющих 23. Продольные оси этих направляющих параллельны продольным осям первой и второй верхних направляющих 17, а также продольной оси подводного объекта, вдоль которой вводят внутрь этого объекта АНПА 5 для зарядки его аккумуляторов.
Акселерометр 24 установлен в непосредственной близости от выходного вала привода 2 механизма подъема. Он прикреплен к раме 1 несущей конструкции над приводным блоком 9 подъемника так, что, при отсутствии качки, крена и дифферента судна, направление измеряемого акселерометром 24 ускорения параллельно осевой линии выходного вала привода 2. Измерительные преобразователи перемещения 25 и скорости перемещения 26 исполнительного органа компенсаторного устройства относительно рамы 1 несущей конструкции установлены на эту раму. Входные подвижные элементы этих измерительных преобразователей соединены с механической передачей привода 2 механизма подъема.
На фиг. 2 показано, что рама 1 несущей конструкции установлена на палубу 27 судна, в качестве которого изображен катамаран. В корпусе 28 катамарана имеется сквозная шахта 29, выполненная в направлении, перпендикулярном плоскости ватерлинии судна. Через шахту 29 производится спуск подводного объекта 4 с судна под воду и возвращение его обратно для последующего извлечения АНПА на палубу 27. Шахта 29 и установленная над ней рама 1 несущей конструкции расположены так, что продольная ось тягового органа 3 подъемника устройства проходит в непосредственной близости от центра масс катамарана.
Система автоматической компенсации влияния качки судна на глубину погружения подводного объекта (фиг. 3) содержит следующие элементы:
привод 2 механизма подъема, тяговый орган 3, подводный объект 4, акселерометр 24, измерительные преобразователи перемещения 25 и скорости перемещения 26, первый 30 и второй 31 командные блоки, управляющий блок 32, первый 33 и второй 34 интегрирующие фильтры, компаратор 35, функциональный преобразователь 36, первый 37 и второй 38 умножители.
К четырем входам управляющего блока 32 подключены соответственно следующие выходы: к первому входу - выход второго командного блока 31, ко второму - выход акселерометра 24, к третьему - выход первого интегрирующего фильтра 33, к четвертому - выход второго интегрирующего фильтра 34. Пятый и шестой входы управляющего блока 32 связаны соответственно с выходами первого 37 и второго 38 умножителей. К седьмому входу управляющего блока 32 подключен выход компаратора 35. Выход первого командного блока 30 подключен к восьмому входу блока 32, выход которого подключен к управляющему входу привода компенсаторного устройства 2. Первый, второй, третий и четвертый входы компаратора 35 подключены соответственно к выходам второго командного блока 31, второго интегрирующего фильтра 34, первого умножителя 37 и первого командного блока 30. Вход фильтра 34 подключен к выходу первого интегрирующего фильтра 33, у которого вход подключен к выходу акселерометра 24.
Вход функционального преобразователя 36, выходной сигнал которого пропорционален длине тягового органа 3, подключен к выходу измерительного преобразователя перемещения 25 привода механизма подъема 2. Выход преобразователя 36 подключен к первым входам первого 37 и второго 38 умножителей, выходы которых подключены соответственно к пятому и шестому входам управляющего блока 32. Выход первого умножителя 37 подключен также к третьему входу компаратора 35, а вторые входы первого 37 и второго 38 умножителей подключены соответственно к выходам измерительных преобразователей перемещения 25 и скорости перемещения 26 привода механизма подъема 2.
СПУ работает следующим образом.
Выполнению спускоподъемных операций и подводных работ мешает качка судна. Поэтому эти работы производятся при малой степени волнения - до трех-четырех баллов. Судно располагают навстречу волнению и ставят на якорь. Постоянство места расположения судна может также поддерживаться работой его гребной установки. При этом гребной движитель создает упор, устраняющий дрейф судна под действием ветра и морского волнения. При таком расположении судна наиболее выражены два вида его качки: килевая и вертикальная, которая имеет значительно меньшую амплитуду, чем при расположении судна лагом к направлению морского волнения. При этом основное перемещение рамы 1 несущей конструкции, к которой через приводной блок 9 подъемника подвешен тяговый орган 3, сопряженный с подводным объектом 4, происходит в направлении, перпендикулярном плоскости ватерлинии судна, то есть в том же направлении, что и у оси максимальной чувствительности акселерометра 24. Амплитуды килевой качки судна при указанном его расположении в несколько раз меньше, чем амплитуды бортовой качки при расположении судна лагом к направлению распространения волн. Именно по этой причине СПУ рассматриваемого назначения не располагают на борту судна. Реальное волнение является трехмерным нерегулярным процессом, поэтому и при расположении судна навстречу волнению действуют не только килевая и вертикальная, но и бортовая качка, которая в таком случае имеет минимальный уровень. Уменьшение уровня бортовой и килевой качки достигается при размещении рамы 1 несущей конструкции не на корме судна, а над сквозной шахтой 29, расположенной в непосредственной близости от центра масс судна. Наименьшее проявление бортовой качки наблюдается у катамаранов, у которых имеются два судовых корпуса, разнесенных один от другого на расстояние, соизмеримое с длиной этих корпусов.
Все время, пока спускоподъемные операции не производятся, и подводный объект 4 находится в крайнем верхнем положении, он прикреплен к палубе 36 судна. В порядке подготовки подводного аппарата 5 к выполнению подводных работ аппарат вводят в подводный объект 4, верхний конец кабеля 6 подключают к судовой электрической сети и выполняют зарядку аккумуляторов подводного аппарата 4. Перед спуском подводного объекта 4 на заданную глубину его освобождают от креплений к палубе 36. Бортовая и килевая качки судна, а также, в меньшей мере, продольно-горизонтальная и поперечно-горизонтальная качки судна вызывают раскачивание подводного объекта 4, подвешенного на тяговом органе 3. Снижению амплитуды раскачивания способствует демпфирующее действие как амортизаторов 11 независимой подвески приводного блока 9 подъемника, так и демпфирующих амортизаторов 12.
Опускание ПЗС на заданную глубину погружения, до 25-30 м, и подъем на судно-носитель осуществляются с помощью привода 2 механизма подъема по сигналу от первого командного блока 30. Эти операции производятся путем изменения длины тягового органа 3 вследствие изменения положения рычагов 7 в результате поступательного движения кареток 15, 16 и 21, 22 по направляющим 17, 23. При этом обеспечивается равенство расстояний между осями шарниров всех четырех верхних кареток 15, 16 и плоскостью, которая проходит через осевую линию тягового органа 3 и перпендикулярна осевым линиям верхних 17 и нижних 23 направляющих, во всем диапазоне изменения этих расстояний. При отсутствии качки судна ось входного вала приводного блока 9 подъемника перпендикулярна плоскости ватерлинии и совпадает с осевой линией тягового органа 3.
Изменение глубины погружения подводного объекта 4 происходит под действием системы автоматического управления, которая работает в функции отклонения глубины и скорости погружения/подъема от заданных значений. Непосредственное измерение глубины и скорости погружения/подъема подводного объекта 4 представляет собой сложную, труднореализуемую задачу. Поэтому предлагается использовать наблюдатели указанных величин. Наблюдаемые сигналы подаются в управляющий блок 32 с выходов первого 37 и второго 38 умножителей. В умножителе 37 выходной сигнал функционального преобразователя 36 умножается на выходной сигнал измерительного преобразователя 25 перемещения, а в умножителе 38 - на выходной сигнал измерительного преобразователя 26 скорости перемещения. В функциональном преобразователе 36, на вход которого подается выходной сигнал измерительного преобразователя 25 перемещения, реализована функциональная зависимость длины тягового органа 3 от угла θ поворота выходного вала привода 2 механизм подъема.
От значений угла θ зависят следующие величины:
пропорциональные углу θ перемещения x шарниров верхних и нижних кареток из их исходных положений, соответствующих наименьшей длине тягового органа 2;
угол α между рычагами 7 первой секции и прямой, проходящей через середины осей шарниров, соединяющих эти два рычага с соответствующими верхними каретками 15 и 16;
расстояние z от этой прямой до первого центрального шарнира;
расстояние у от шарниров кареток до плоскости, проходящей через центральные шарниры 8.
Все величины х, у, z удобно измерять в относительных величинах, принимая в качестве базовой величины полудлину l рычагов 7. Начальное значение у0 является наибольшим. Оно меньше единицы из-за ненулевой ширины рычагов 7 и равно cosα0. Начальный угол α0 выжимных рычажных подъемников ограничен пределами от 10° до 15°. Наибольший же угол αmax находится в пределах от 45° до 50°. Его значение тем меньше, чем больше длина кареток. Начальное значение z0 является наименьшим и равно sinα0. Наибольшее приращение z равно (sinαmax-sinα0), оно не превосходит 0,34. Зависимость выраженного в метрах приращения Z длины тягового органа 2 от перемещения х определяется формулой:

где n - число секций тягового органа 2. Аналогичное (1) выражение заложено в алгоритм функционального преобразователя 36.
Когда в управляющий блок 32 поступит сигнал от первого командного блока 30, привод 2 механизм подъема сначала разгоняет подводный объект 4 с заданным ускорением до заданной скорости погружения/подъема. Затем привод 2 поддерживает эту скорость до глубины, несколько отличающейся от заданной, а потом тормозит движение подводного объекта 4 с заданным ускорением, пока он не достигнет заданной глубины. При этом заданное значение скорости погружения/подъема подводного объекта 4 становится равным нулю.
Пусть на судно-носитель СПУ действует только вертикальная качка, а процесс спуска подводного объекта 4 на заданную глубину уже завершен. При этом осевая линия тягового органа 3 совпадает с осевой линией выходного вала привода 2 механизма подъема и параллельна направлению ускорения вертикальной качки, измеряемого акселерометром 24. Система автоматической компенсации влияния качки судна на глубину погружения подводного объекта 4 начинает действовать по сигналу, поступающему от второго командного блока 31 на управляющий блок 32. Эта система из заданного значения скорости погружения/подъема подводного объекта 4 вычитает скорость вертикальной качки рамы 1 несущей конструкции и воздействует на привод 2 механизма подъема так, чтобы входной сигнал умножителя 38 соответствовал полученной разности.
Для определения указанной скорости качки используется наблюдатель, в качестве которого применен первый интегрирующий фильтр 33, на вход которого с выхода акселерометра 24 поступает сигнал ускорения качки. Второй наблюдатель, в качестве которого применен второй интегрирующий фильтр 34, определяет вызванное качкой судна перемещение точки подвеса тягового органа 3. На вход фильтра 34 подается сигнал скорости качки, поступающий с выхода фильтра 33.
По сигналу, поданному вторым командным блоком 31, вступает в действие компаратор 35, который сравнивает разность выходных сигналов первого умножителя 37 и первого командного блока 30 с выходным сигналом второго интегрирующего фильтра 34. Указанная разность равна сигналу, пропорциональному мгновенному значению отклонения глубины погружения подводного объекта 4 от заданного значения этой глубины. В момент когда эта разность становится равной выходному сигналу второго интегрирующего фильтра 34, компаратор 35 подает в управляющий блок 32 сигнал на начало работы СПУ в режиме компенсации возмущений, вызванных перемещениями от качки судна, ее скорости и ускорения. При этом выходные сигналы акселерометра 24 и интегрирующих фильтров 33 и 34 подаются в управляющий блок 32. Наличие компаратора позволяет сократить время переходного процесса, возникающего при переводе спускоподъемного устройства в режим работы с компенсацией влияния качки судна.
В процессе компенсации влияния качки судна на глубину погружения подводного объекта 4, который осуществляет система автоматического управления, основную роль играет контур регулирования скорости, с которой изменяется длина тягового органа 3. Действие этого контура направлено на уменьшение разности выходных сигналов, поступающих в управляющий блок 32 от первого интегрирующего фильтра 33 и второго умножителя 38. Управляющий блок 32 формирует сигнал, воздействующий на привод 2 механизма подъема таким образом, что при перемещении рамы 1 несущей конструкции вверх происходит увеличение длины тягового органа 3, а при перемещении вниз - ее уменьшение. В результате чего положение подводного объекта 4 относительно невзволнованной поверхности воды почти не меняется, а его ускорение и скорость практически равны нулю. Введение сигнала от акселерометра 24 и от второго интегрирующего фильтра 34 позволяет увеличить точность и быстродействие САУ, компенсируя влияние инерционности элементов привода компенсаторного устройства. Таким образом, система автоматической компенсации выполняет управление по следующим трем видам возмущения: по качке судна, скорости и ускорению этой качки.
Благодаря тому, что спускоподъемные операции и компенсация влияния качки судна осуществляются одним тяговым органом 3 и одним приводом 2, обеспечивается снижение массы и стоимости СПУ.
Кабель 6, который проложен и прикреплен к рычагам 7 предлагаемым образом, при выполнении спускоподъемных операций и компенсация влияния качки судна не препятствует движению рычагов, а в нем самом не возникают существенные изгибные деформации.
Помимо вертикальной качки необходимо учитывать еще две ее разновидности: килевую и бортовую. Даже при расположении судна-носителя навстречу морскому волнению килевая качка относительно невелика. Для судна длиной не менее 50 м при волнении с интенсивностью четыре балла наибольшее значение амплитуды килевой качки составляет около 3°.
Выход АНПА из ПЗС и возвращение его обратно производят на глубине до 25-30 м. На глубине порядка 20 м и более морское волнение практически отсутствует и не действует на АНПА, когда он находится вне ПЗС. Но если тяговый орган 3 не мог бы поворачиваться вокруг точки его подвеса и имел длину около 30 м, указанной амплитуде килевой качки соответствовало бы перемещение ПЗС 4 с максимальной амплитудой около 1,5 м. Естественно, что при этом операции вывода АНПА из ПЗС и ввода его обратно выполнять невозможно. Попытки осуществить их привели бы к повреждению ПЗС или/и АНПА.
Для исключения подобных ситуаций тяговый орган 3 связан с рамой 1 несущей конструкции и с приводом 2 механизма подъема не жестко, а с помощью амортизаторов 11 независимой подвески и карданного механизма 10. Эти конструктивные особенности устройства, а также действие приложенных со стороны водной среды к ПЗС 4 и тяговому органу 3 гидродинамических сил и сил трения уменьшают вызванные килевой и бортовой качками судна отклонения как осевой линии тягового органа 3 от вертикали, так и ПЗС от среднего места его расположения.
Углы между вертикалью и осями акселерометра 24 (δ1) и тягового органа 3 (δ2) изменяются во времени из-за воздействия на судно бортовой и килевой качек. Поэтому акселерометр измеряет не ускорение вертикальной качки, а его проекцию на ось акселерометра, которая равна произведению ускорению вертикальной качки на cosδ1. Это произведение меньше самого ускорения. Так как тяговый орган наклонен по отношению к вертикали, то полученное на выходе второго интегрирующего фильтра 34 значение расчетного приращения длины тягового органа 3 оказывается меньше необходимого для сохранения положения нижнего конца этого органа. Отношение расчетного значения к необходимому равно cosδ2.
Применительно к катамарану при волнении до четырех баллов указанные углы δ1 и δ2 не превосходят 3°. Соответствующие таким углам косинусы равны 0,999, а их произведение составляет 0,997. Таким образом, методическая погрешность измерения и преобразования измерительной информации, используемой в устройстве, является ничтожно малой.
Благодаря указанным особенностям конструкции устройства и работе системы автоматической компенсации качки судна-носителя и стабилизации глубины погружения подводного объекта 4 его положение в условиях морского волнения изменяется незначительно. АНПА 5 может входить внутрь ПЗС без ударов и повреждений и после стыковки контактных поверхностей АНПА и ПЗС осуществлять зарядку своих аккумуляторов. После завершения зарядки аккумулятора происходит расстыковка и АНПА 5 выходит из подводного объекта 4 для продолжения подводных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2381133C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2590801C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГЛУБИНОЙ ПОГРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2261191C1 |
| КОМПЛЕКС ДЛЯ СПУСКА И ПОДЪЕМА ОБОРУДОВАНИЯ ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МОРЕЙ | 2023 |
|
RU2814109C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2584351C1 |
| СПУСКОПОДЪЁМНОЕ УСТРОЙСТВО | 2015 |
|
RU2585181C1 |


Изобретение относится к судовой технике и может быть использовано для спуска, подъема и стабилизации глубины погружения подводных зарядных станций, заряжающих аккумуляторные батареи подводных аппаратов. Спускоподъемное устройство содержит снабженный приводом механизм подъема. Тяговый орган устройства связан с подводной зарядной станцией и выполнен как у выжимного рычажного подъемника, содержащего две идентичные сопряженные рычажные системы. Приводной блок подъемника прикреплен к установленной на судне несущей раме с использованием карданного механизма, независимой подвески и демпфирующих амортизаторов. Спуск и подъем подводной зарядной станции производится через сквозную шахту, которая проходит в непосредственной близости от центра масс судна. Привод механизма подъема вместе с акселерометром и двумя интегрирующими фильтрами образует систему автоматического управления длиной тягового органа. Кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, протянут вдоль последовательно соединенных шарнирами рычагов одной из рычажных систем. Достигается возможность стабилизации глубины погружения подводной зарядной станции. 3 з.п. ф-лы, 3 ил.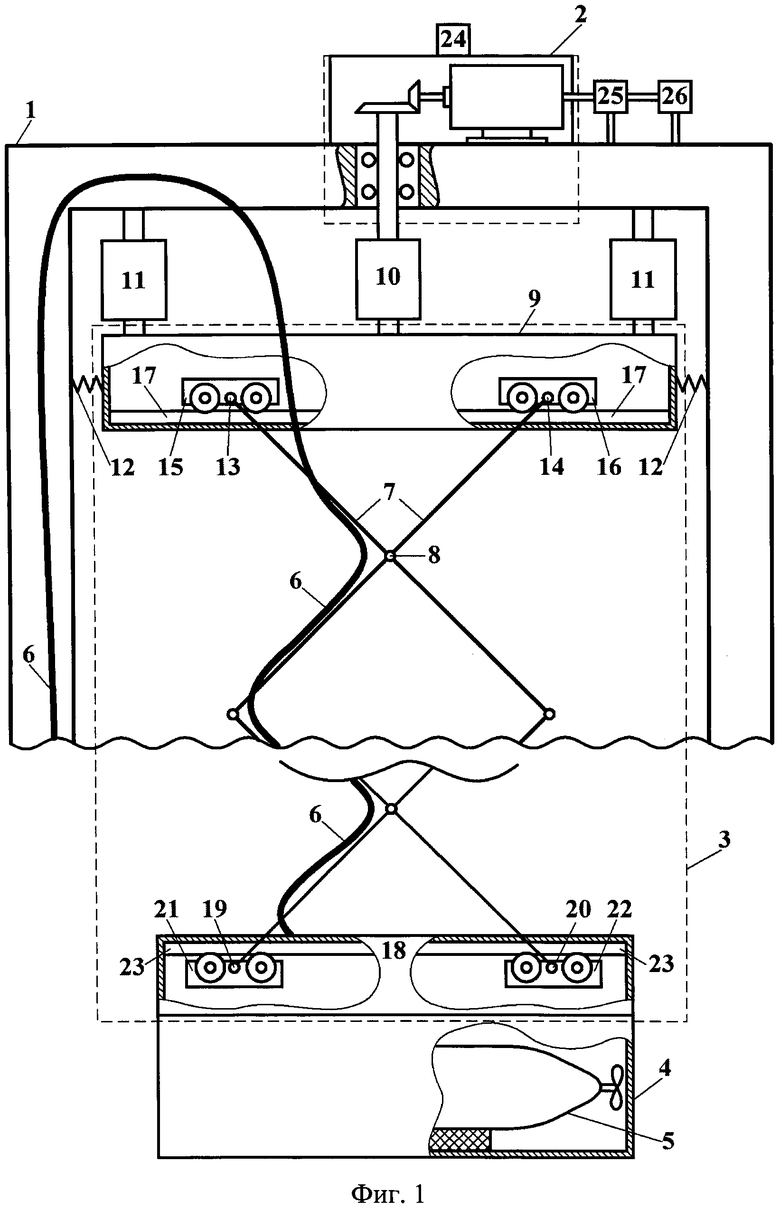
1. Спускоподъемное устройство, содержащее установленный на судне снабженный приводом механизм подъема, тяговый орган которого связан с подводным объектом, внутрь которого введен подводный аппарат для зарядки под водой аккумуляторов этого аппарата, первый командный блок и кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, входящий в состав системы автоматической компенсации влияния качки судна на глубину погружения подводного объекта совместно с тяговым органом, приводом и передачей компенсаторного устройства, которая прикреплена к установленной на судне несущей конструкции, вторым командным блоком, управляющим блоком, акселерометром, установленным на судне в районе расположения механизма подъема так, что направление измеряемого им ускорения перпендикулярно плоскости ватерлинии судна, первым и вторым интегрирующими фильтрами, компаратором, измерительными преобразователями перемещения и скорости перемещения исполнительного органа компенсаторного устройства относительно несущей конструкции, при этом указанная система автоматической компенсации выполняет управление по следующим видам возмущения: по качке судна, скорости и ускорению этой качки, причем первый командный блок связан с управляющим входом привода механизма подъема, выход управляющего блока подключен к управляющему входу привода компенсаторного устройства, а к четырем входам управляющего блока подключены соответственно следующие выходы: к первому входу - выход второго командного блока, ко второму входу - выход акселерометра, к третьему входу - выход первого интегрирующего фильтра, к четвертому входу - выход второго интегрирующего фильтра, пятый и шестой входы управляющего блока связаны соответственно с выходами измерительных преобразователей перемещения и скорости перемещения исполнительного органа компенсаторного устройства, к седьмому входу управляющего блока подключен выход компаратора, первый и второй входы которого подключены соответственно к выходам второго командного блока и второго интегрирующего фильтра, вход которого подключен к выходу первого интегрирующего фильтра, у которого вход подключен к выходу акселерометра, а третий вход компаратора связан с выходом упомянутого измерительного преобразователя перемещения, отличающееся тем, что в спускоподъемное устройство дополнительно введены преобразователь вращательного движения привода компенсаторного устройства в изменение длины тягового органа, карданный механизм, функциональный преобразователь, а также первый и второй умножители, компенсаторное устройство выполняет также функции механизма подъема, а привод компенсаторного устройства - функции привода механизма подъема, тяговый орган выполнен как у выжимного рычажного подъемника, содержащего первую и вторую идентичные сопряженные рычажные системы, каждая из которых состоит из одинакового числа n секций, составленных из 2n рычагов с одинаковой полудлиной l, через середины каждой пары рычагов каждой секции проходят оси, образуя при этом центральные шарниры, а рычажные системы расположены симметрично относительно осевой линии подъемника, верхние концы верхней секции первой рычажной системы образуют первые верхние правый и левый шарниры с двумя первыми верхними правой и левой каретками, с возможностью их перемещения вдоль сопряженной с ними первой верхней направляющей, а верхние концы верхней секции второй рычажной системы образуют вторые верхние левый и правый шарниры с двумя вторыми верхними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними второй верхней направляющей, нижние же концы нижней секции первой рычажной системы образуют первые нижние левый и правый с двумя первыми нижними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними первой нижней направляющей, а концы нижней секции второй рычажной системы образуют вторые нижние левый и правый шарниры с двумя вторыми нижними левой и правой каретками, с возможностью их перемещения вдоль сопряженной с ними второй нижней направляющей, причем нижние направляющие размещены в нижнем блоке подъемника, который прикреплен к подводному объекту так, что продольные оси этих направляющих параллельны продольной оси подводного объекта, вдоль которой вводят внутрь этого объекта подводный аппарат для зарядки его аккумуляторов, верхние направляющие совместно с верхними первыми и вторыми левыми и правыми каретками, которые являются исполнительным органом компенсаторного устройства, и преобразователем вращательного движения привода компенсаторного устройства в изменение длины тягового органа, что достигается благодаря поступательному движению верхних кареток, установленных в приводной блок подъемника, образуя передачу компенсаторного устройства, при этом продольные оси верхних направляющих параллельны продольным осям нижних направляющих, а передача компенсаторного устройства обеспечивает равенство расстояний между осями шарниров всех четырех верхних кареток и плоскостью, которая проходит через осевую линию подъемника и перпендикулярна осевым линиям верхних и нижних направляющих, во всем диапазоне изменения этих расстояний, при этом ось входного вала передачи компенсаторного устройства совпадает с осевой линией подъемника, несущая конструкция выполнена в виде установленной на судне рамы, к которой прикреплен приводной блок подъемника с использованием независимой подвески четырех точек, расположенных на периферии верхней наружной поверхности этого блока на равных расстояниях от осевой линии подъемника, а между расположенными в нижней части наружной боковой поверхности этого блока точками и рамой несущей конструкции установлены демпфирующие амортизаторы, которые вместе с амортизаторами подвески демпфируют вызванные качкой судна перемещения приводного блока относительно указанной рамы, причем параметры всех перечисленных амортизаторов настраиваются так, чтобы при отсутствии качки, крена и дифферента судна направление осевой линии подъемника было бы перпендикулярным к плоскости судовой ватерлинии, привод механизма подъема и акселерометр, установленный в непосредственной близости от выходного вала привода механизма подъема, прикреплены к раме несущей конструкции над приводным блоком подъемника так, что осевая линия выходного вала этого привода, при отсутствии качки, крена и дифферента судна, совпадает с осевой линией подъемника, а направление измеряемого акселерометром ускорения параллельно этой линии, выходной вал привода механизма подъема соединен с входным валом передачи компенсаторного устройства через карданный механизм, вход функционального преобразователя, выходной сигнал которого пропорционален длине тягового органа, подключен к выходу измерительного преобразователя перемещения исполнительного органа компенсаторного устройства, а выход этого преобразователя подключен к первым входам первого и второго умножителей, выходы которых подключены соответственно к пятому и шестому входам управляющего блока, кроме того, выход первого умножителя подключен к третьему входу компаратора, а вторые входы первого и второго умножителей подключены соответственно к выходам измерительных преобразователей перемещения и скорости перемещения исполнительного органа компенсаторного устройства, выход первого командного блока подключен к восьмому входу управляющего блока и к четвертому входу компаратора.
2. Спускоподъемное устройство по п.1, отличающееся тем, что кабель, передающий электроэнергию от судовой электроэнергетической системы на подводный объект, протянут вдоль последовательно соединенных шарнирами рычагов одной из рычажных систем и прикреплен к этим рычагам в точках, распределенных по их длине, исключая участки рычагов, прилегающих к указанным шарнирам.
3. Спускоподъемное устройство по п.1, отличающееся тем, что рама несущей конструкции установлена на палубе судна так, что спуск и подъем подводного объекта с помещенным в нем подводным аппаратом производится через сквозную шахту, выполненную в корпусе судна в направлении, перпендикулярном плоскости ватерлинии.
4. Спускоподъемное устройство по п.1, отличающееся тем, что в качестве судна, несущего устройство, используется катамаран, причем устройство установлено на его палубе так, что продольная ось тягового органа подъемника устройства проходит в непосредственной близости от центра масс катамарана.
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| Судовое устройство для спуска и подьема груза | 1972 |
|
SU492424A1 |
| Гидравлический генератор импульсов | 1982 |
|
SU1068632A1 |

