Изобретение относится к судовой технике, а именно к судовым спускоподъемным устройствам.
Известны устройства управления глубиной погружения подводного объекта, содержащие судовую лебедку, на барабан которой запасован верхний конец кабель-троса, нижний конец которого через гермоввод соединен с подводным объектом, а также устройство управления приводом лебедки, к входам которого подключены выходы задатчика, измерительных преобразователей скорости качки грузового блока лебедки и глубины погружения подводного объекта [1, 2]. В таких устройствах управление скоростью судовой лебедки в режимах спуска и подъема осуществляется как по заведенному с пульта управления значению, так и по возмущению - по скорости качки грузового блока. В режиме стабилизации глубины погружения подводного объекта управление приводом лебедки осуществляется по возмущению - по скорости качки грузового блока и по отклонению глубины погружения подводного объекта. Эти устройства обеспечивают высокую точность управления глубиной погружения и практически полное устранение влияния качки судна-носителя.
В этих устройствах реализован способ управления глубиной погружения подводного объекта, включающий изменение со стороны судна длины гибкой механической связи между этим объектом и судном, причем указанным изменением производят как основное перемещение подводного объекта по вертикали, так и компенсацию влияния морского волнения тем, что скорость судовой лебедки поддерживают равной по модулю и противоположной по направлению той составляющей скорости качки точки подвеса гибкой механической связи к судну, которая направлена вдоль этой связи.
У этих устройств и у реализованного в них способа управления глубиной погружения подводного объекта имеются следующие недостатки: низкое быстродействие контура управления по отклонению глубины погружения, т.к. для обеспечения устойчивости частота среза этого контура должна быть меньше частоты первого резонансного максимума звена кабель-трос - подводный объект, которая составляет 0,1 Гц и менее при длине кабель-троса несколько километров; резкое сокращение срока службы кабель-троса, что вызвано его изгибными деформациями при сматывании-наматывании на барабан лебедки в процессе компенсации влияния качки судна-носителя под действием управления по возмущению. Кабель-трос допускает всего 1000-2000 изгибов при прохождении через блоки. Этот ресурс может быть израсходован за несколько часов непрерывной работы лебедки.
Наиболее близким по технической сущности к заявленному устройству является выбранное в качестве прототипа устройство, содержащее судовую лебедку, установленную на судне, и амортизирующую лебедку, установленную на подводном объекте, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу судовой лебедки, и второй управляющий блок, первый вход которого подключен к установленному на судне второму задатчику, а выход - к управляющему входу привода амортизирующей лебедки. Указанные лебедки соединены гибкой связью, состоящей из кабель-троса и каната, причем один конец каната заведен на барабан амортизирующей лебедки, а другой прикреплен замковым соединением к кабель-тросу, один конец которого заведен на барабан судовой лебедки, а второй герметично соединен с корпусом подводного объекта с образованием петли на участке от замкового соединения до гермоввода. Система управления приводом судовой лебедки включает в себя первый задатчик, который задает среднюю скорость этой лебедки, и первый управляющий блок. Второй задатчик задает среднее значение длины каната, смотанного с барабана амортизирующей лебедки. Этот задатчик соединен с первым входом второго управляющего блока через кабель-трос. Система автоматического управления (САУ) электроприводом амортизирующей лебедки замкнута отрицательными обратными связями по скорости и длине каната. Измерительные преобразователи длины и скорости каната подключены соответственно ко второму и третьему входам второго управляющего блока [3]. Основное перемещение подводного объекта осуществляется путем сматывания или наматывания кабель-троса с барабана судовой лебедки со скоростью, заданной первым задатчиком. Амортизирующая лебедка вместе со вторым управляющим блоком образует САУ моментом привода лебедки, который определяется суммой сигналов со второго задатчика и сигналов отрицательной обратной связи от измерительных преобразователей скорости и длины каната. На эту систему действуют возмущения, которые обусловлены качкой судна и работой привода судовой лебедки. Эти возмущения проявляются в изменении усилия, приложенного к канату со стороны кабель-троса. На возникающие за счет этого изменения скорости и длины каната система управления реагирует изменением момента двигателя привода амортизирующей лебедки так, что происходит демпфирование этих возмущений, чем обеспечивается стабилизация глубины погружения подводного объекта независимо от длины кабель-троса, а также длительное нахождение подводного объекта на взволнованной поверхности воды без рывков в канате. Среднюю длину части каната, смотанной с барабана амортизирующей лебедки, можно изменять, подавая соответствующий сигнал со второго задатчика, установленного на судне, что позволит регулировать глубину погружения подводного объекта, компенсируя, например, влияние течений, или осуществить плавное сближение опускаемого объекта с каким-либо предметом на морском дне.
В этом прототипе реализован способ управления глубиной погружения подводного объекта, включающий изменение длины составленной из двух частей гибкой механической связи между этим объектом и судном, причем основное перемещение подводного объекта по вертикали осуществляют со стороны судна изменением длины первой части указанной связи, а дополнительное перемещение осуществляют изменением со стороны подводного объекта длины второй части этой связи, изменением длины которой производят также стабилизацию глубины погружения подводного объекта, компенсируя при этом влияние морского волнения тем, что первое слагаемое усилия во второй части гибкой связи поддерживают равным весу подводного объекта в воде, второе слагаемое этого усилия поддерживают пропорциональным отклонению длины этой части от ее математического ожидания, а третье слагаемое - пропорциональным скорости изменения ее длины. Длина смотанной части каната не должна быть больше максимального и меньше минимального ее значений. При минимальном значении длины смотанной части каната замковое соединение еще не соприкасается с корпусом подводного объекта, а при максимальном значении этой длины петля кабель-троса еще не полностью распрямилась. При достижении любого из крайних значений длины смотанной части каната привод амортизирующей лебедки переводится в заторможенное состояние, когда скорость амортизирующей лебедки равна нулю. Если непосредственно перед моментом торможения скорость амортизирующей лебедки не была равной нулю, то ее скачкообразное изменение приведет к ударному воздействию как на подводный объект, так и на кабель-трос. Возникающее при этом сотрясение подводного объекта ухудшает качество работы установленной на нем аппаратуры для измерения физических полей океана, создавая помехи измеряемым сигналам и взмучивая воду при нахождении подводного объекта вблизи морского дна. Ударное воздействие на кабель-трос запускает в нем распространяющийся по нему со скоростью звука и отражающийся от его концов колебательный процесс изменения положения и скорости поперечных сечений кабель-троса. Возникающее при этом изменение глубины погружения подводного объекта затухает медленно, что надолго ухудшает качество установленной на нем аппаратуры и может приводить к ударам опускаемого объекта о дно океана. Аналогичные процессы будут наблюдаться и при отсутствии тормозного устройства в приводе амортизирующей лебедки. Такие ударные воздействия на подводный объект и на кабель-трос в этом случае происходят при соприкосновении замкового соединения с корпусом подводного объекта или при полном распрямлении петли кабель-троса, если непосредственно перед указанными событиями скорость амортизирующей лебедки не равнялась нулю. Отрицательные последствия, сопутствующие указанным событиям, проявляются тем сильнее, чем больше скорость амортизирующей лебедки в предшествующие этим событиям моменты времени.
Недостаток этого устройства заключается в том, что оно не исключает появление описанных ударных воздействий на опускаемый объект.
Заявленное изобретение направлено на повышение эффективности использования подводного объекта при нахождении его под водой в условиях развитого морского волнения путем исключения скачкообразного изменения скорости амортизирующей лебедки при прохождении экстремальных значений длины каната, смотанного с барабана амортизирующей лебедки.
Технический результат, который достигается при решении поставленной задачи, выражается в том, что из заданного вторым задатчиком приращения среднего значения длины каната, смотанного с барабана амортизирующей лебедки, САУ этой лебедкой отрабатывает лишь допустимую часть, которая определяется на основании известных значений минимальной и максимальной длин каната, а также двух расчетных величин: среднего значения (математического ожидания) и дисперсии длины каната, смотанного с барабана амортизирующей лебедки, соответствующих предшествующему процессу компенсации влияния случайного морского волнения на систему «судно - гибкая упругая механическая связь - амортизирующая лебедка с системой автоматического управления - подводный объект» при каком-то определенном расположении судна по отношению к направлению распространения морского волнения с какой-либо определенной интенсивностью.
Поставленная задача решается следующим образом: устройство для управления глубиной погружения подводного объекта, содержащее установленную на судне судовую лебедку, установленную на подводном объекте амортизирующую лебедку, кабель-трос, канат, один конец которого заведен на амортизирующую лебедку, а другой посредством замкового соединения прикреплен к кабель-тросу, один конец которого заведен на барабан судовой лебедки, а другой прикреплен к корпусу подводного объекта с образованием петли на участке между этим объектом и упомянутым замковым соединением, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу привода судовой лебедки, и второй управляющий блок, выход которого подключен к управляющему входу привода амортизирующей лебедки, первый вход второго управляющего блока связан со вторым задатчиком, а второй и третий входы этого блока подключены соответственно к выходам измерительных преобразователей длины каната, смотанного с барабана амортизирующей лебедки, и скорости каната относительно подводного объекта, отличается тем, что оно снабжено первым и вторым вычислительными блоками, причем вход первого вычислительного блока подключен к выходу измерительного преобразователя длины каната, смотанного с барабана амортизирующей лебедки, а оба его выхода подключены соответственно ко второму и третьему входам второго вычислительного блока, первый вход которого подключен ко второму задатчику, а выход этого блока подключен к первому входу второго управляющего блока.
В способе управления глубиной погружения подводного объекта, включающем изменение длины составленной из двух частей гибкой механической связи между этим объектом и судном, причем основное перемещение осуществляют со стороны судна изменением длины первой части указанной связи, а дополнительное перемещение осуществляют изменением со стороны подводного объекта длины второй части этой связи, изменением длины которой производят также стабилизацию глубины погружения подводного объекта, компенсируя при этом влияние морского волнения тем, что первое слагаемое усилия во второй части гибкой связи поддерживают равным весу подводного объекта в воде, второе слагаемое этого усилия поддерживают пропорциональным отклонению длины этой части от ее математического ожидания, а третье слагаемое - пропорциональным скорости изменения ее длины, согласно предлагаемому решению дополнительные перемещения ограничивают пределами, которые определяют с учетом минимального и максимального допустимых значений длины второй части этой связи, а также математического ожидания и дисперсии ее длины, которые измеряют до времени выполнения дополнительного перемещения.
Кроме того, предел на увеличение длины второй части гибкой механической связи принимают равным максимальному допустимому значению этой длины, из которой вычитают ее математическое ожидание и произведение квадратного корня из ее дисперсии на заданный коэффициент, а предел на уменьшение ее длины принимают равным минимальному допустимому значению этой длины, из которого вычитают ее математическое ожидание и прибавляют произведение квадратного корня из ее дисперсии на заданный коэффициент, который принимают таким, чтобы изменение длины второй части гибкой механической связи не выходило за допустимые пределы с заданной вероятностью.
Сопоставительный анализ признаков заявляемого решения и признаков аналога и прототипа свидетельствует о его соответствии критерию "новизна".
Совокупность отличительных признаков предлагаемого устройства обеспечивает такие ограничения дополнительных перемещений подводного объекта, которые исключают скачкообразное изменение скорости амортизирующей лебедки при прохождении экстремальных значений длины каната, смотанного с барабана амортизирующей лебедки.
Отличительные признаки второго пункта формулы устанавливают зависимость ограничений дополнительных перемещений от параметров и характеристик длины второй части гибкой механической связи между судном и подводным объектом.
Отличительные признаки третьего пункта формулы обеспечивают определение таких параметров вычислительных блоков САУ амортизирующей лебедки, которые исключают скачкообразное изменение ее скорости с заданной вероятностью.
Изобретение поясняется чертежом, на котором приведена функциональная схема устройства.
Позиции на чертеже обозначают:
1 - подводный объект; 2 - судовая лебедка; 3 - судно-носитель; 4 - амортизирующая лебедка; 5 - кабель-трос; 6 - канат; 7 - замковое соединение; 8 - гермоввод; 9 - барабан судовой лебедки; 10 - барабан амортизирующей лебедки; 11 - привод судовой лебедки; 12 - первый задатчик (скорости судовой лебедки); 13 - первый управляющий блок; 14 - привод амортизирующей лебедки; 15 - второй управляющий блок; 16 - второй задатчик (среднего значения длины каната); 17 - измерительный преобразователь длины каната; 18 - измерительный преобразователь скорости каната; 19 - первый вычислительный блок; 20 - второй вычислительный блок; 21 - токосъемник.
Устройство, предназначенное для управления глубиной погружения подводного объекта 1 содержит судовую лебедку 2, установленную на судне-носителе 3, и амортизирующую лебедку 4, установленную на подводном объекте 1. Между подводным объектом 1 и судном-носителем 3 имеется гибкая механическая связь, состоящая из кабель-троса 5 и каната 6. Кабель-трос 5 связан с канатом 6 замковым соединением 7 с образованием петли между соединением 7 и креплением кабель-троса 5 к опускаемому подводному объекту 1 через гермоввод 8. Кабель-трос 5 и канат 6 образуют гибкую связь между судном 3 и подводным объектом 1. Верхний конец кабель-троса 5 намотан на барабан 9 судовой лебедки 2, а нижний конец соединен с подводным объектом 1. Один конец каната 6 намотан на барабан 10 амортизирующей лебедки 4, а другой через замковое соединение 7 связан с кабель-тросом 5. Система управления электроприводом 11 судовой лебедки 2 включает в себя первый задатчик 12 (средней скорости судовой лебедки 2) и соединенный с ним первый управляющий блок 13, выход которого связан с управляющим входом привода 11. САУ приводом 14 амортизирующей лебедки 4 содержит второй управляющий блок 15, второй задатчик 16 (средней длины каната 6), измерительные преобразователи 17 (длины) и 18 (скорости) каната 6, а также первый и второй вычислительные блоки 19, 20. Управляющий вход привода 14 амортизирующей лебедки 4 подключен к выходу второго управляющего блока 15, к входам которого подключены выходы второго вычислительного блока 20 и измерительных преобразователей 17 (длины) и 18 (скорости) каната 6. Вход первого вычислительного блока 19 подключен к выходу измерительного преобразователя 17 длины каната 6, а выходы - ко второму и третьему входам второго вычислительного блока 20, первый вход которого через кабель-трос 5 и токосъемник 21 связан со вторым задатчиком 16 среднего значения смотанной с барабана 10 длины каната 6.
Устройство работает следующим образом.
Основное перемещение подводного объекта (опускание на поверхность воды, выход на заданную глубину погружения, подъем на судно) осуществляют путем сматывания или наматывания кабель-троса 5 с барабана 9 судовой лебедки 2 со скоростью, заданной задатчиком 12. Амортизирующая лебедка 4 вместе с задатчиком 16 среднего значения длины каната 6, управляющим блоком 15, вычислительными блоками 19, 20 и измерительными преобразователями 17 (длины) и 18 (скорости) каната 6 образует САУ моментом привода амортизирующей лебедки 4. Момент на барабане 10 амортизирующей лебедки 4 имеет постоянную и переменную составляющие. Постоянная составляющая уравновешивает момент нагрузки, соответствующий весу подводного объекта 1 в воде, а переменная составляющая, в свою очередь, разделяется на две. Первая из них пропорциональна отклонению смотанной с барабана 10 длины каната 6 от ее математического ожидания, а вторая пропорциональна скорости изменения его длины. Чем больше длина смотанной с барабана 10 лебедки 4 части каната 6, с чем большей скоростью происходит его сматывание, чем больше амплитуда перемещения замкового соединения 7, тем больший момент развивает привод 14 амортизирующей лебедки 4, тем большее усилие действует в канате 6.
При изменении скорости судовой лебедки 2 или под действием качки судна-носителя 3 на морском волнении в кабель-тросе 5 возникают продольные механические колебания, вызывающие переменные усилия, которые, воздействуя через канат 6 на амортизирующую лебедку 4, изменяют момент на ее барабане 10. При перемещении соединения 7 вверх канат 6 сматывается с барабана 10 амортизирующей лебедки 4, а при перемещении соединения 7 вниз - наматывается, уменьшая тем самым размах изменения усилия в канате 6 и перемещения подводного объекта 1. Таким образом осуществляют компенсацию влияния качки судна-носителя 3 на глубину погружения подводного объекта 1, удержание его на взволнованной поверхности воды и устраняют появление слабины и рывков в гибкой связи.
При изменении средней длины смотанной части каната 6 изменяется расстояние между замковым соединением 7 и подводным объектом 1 и, следовательно, глубина его погружения. Таким образом производят дополнительное перемещение подводного объекта 1 в вертикальном направлении, ограниченное полной длиной каната 6. Этим перемещением можно подрегулировать глубину погружения подводного объекта 1, компенсируя, например, влияние течений, или осуществить плавное сближение подводного объекта 1 с каким-либо предметом на морском дне.
Для предотвращения ударных воздействий на подводный объект 1 и кабель-трос 5, возникающих при скачкообразном изменении скорости амортизирующей лебедки 4 при прохождении экстремальных значений длины каната 6, САУ амортизирующей лебедки 4 ограничивает дополнительные перемещения подводного объекта 1.
Ограничения достигают за счет того, что из заданного вторым задатчиком 16 приращения среднего значения длины каната 6, смотанного с барабана 10 амортизирующей лебедки 4, на второй управляющий блок 15 подают лишь допустимую часть, которую рассчитывают вторым вычислительным блоком 20 с учетом известных значений минимальной и максимальной длин каната 6, его математического ожидания и дисперсии, соответствующих предшествующему процессу компенсации влияния случайного морского волнения, вычисленных первым вычислительным блоком 19 на основании данных, полученных от измерительного преобразователя 17 длины каната 6.
Предел на увеличение длины каната 6 принимают равным известному максимальному допустимому значению этой длины, из которой вычитают ее математическое ожидание и произведение квадратного корня из ее дисперсии на заданный коэффициент. Предел на уменьшение ее длины принимают равным минимальному допустимому значению этой длины, из которого вычитают ее математическое ожидание и прибавляют произведение квадратного корня из ее дисперсии на заданный коэффициент. Значение этого коэффициента принимают таким, чтобы изменение длины каната 6 не выходило за допустимые пределы с заданной вероятностью.
Таким образом, использование заявленного устройства и способа управления глубиной погружения подводного объекта повышает безопасность и эффективность использования подводного объекта при нахождении его под водой в условиях развитого морского волнения.
Источники информации
1. Авторское свидетельство СССР №714606, кл. Н 02 Р 5/06. Устройство для управления электродвигателем судовой лебедки (Кувшинов Г.Е., Урываев К.П.), 1980, БИ №5.
2. Авторское свидетельство СССР №826538, кл. Н 02 Р 5/06. Устройство для управления электродвигателем судовой лебедки (Кувшинов Г.Е., Урываев К.П.), 1981, БИ №16.
3. Патент РФ №211475601. Спускоподъемное устройство/ Г.Е.Кувшинов, К.В.Подкорытова// Бюл., 1998, №19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2590801C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2584351C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2381133C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Судовое подъемно-опускное устройство для буксируемого подводного аппарата | 1982 |
|
SU1096162A1 |
Изобретение относится к судовым спускоподъемным устройствам. Устройство содержит установленные на судне-носителе судовую лебедку, на которую заведен кабель-трос, соединенный с подводным объектом, управляющий блок этой лебедки с подключенным к его входу первым задатчиком и второй задатчик. На поднимаемом объекте установлены амортизирующая лебедка, на которую заведен канат, прикрепленный к кабель-тросу, управляющий блок этой лебедки, а также измерительные преобразователи длины и скорости каната, смотанного с барабана лебедки. Кроме того, устройство снабжено первым и вторым вычислительными блоками. Вход первого вычислительного блока подключен к измерительному преобразователю длины каната. Второй вычислительный блок первым входом подключен ко второму задатчику, а выходом - к первому входу управляющего блока амортизирующей лебедки, ко второму и третьему входам которого подключены упомянутые преобразователи. Два других входа второго вычислительного блока подключены к выходам первого вычислительного блока. Дополнительное перемещение подводного объекта по вертикали, осуществляемое изменением длины каната, ограничивают пределами, определяемыми с учетом допустимых значений, математического ожидания и дисперсии длины каната. Реализация данного изобретения позволит исключить скачкообразные изменения скорости амортизирующей лебедки. 2 н. и 1 з.п. ф-лы, 1 ил.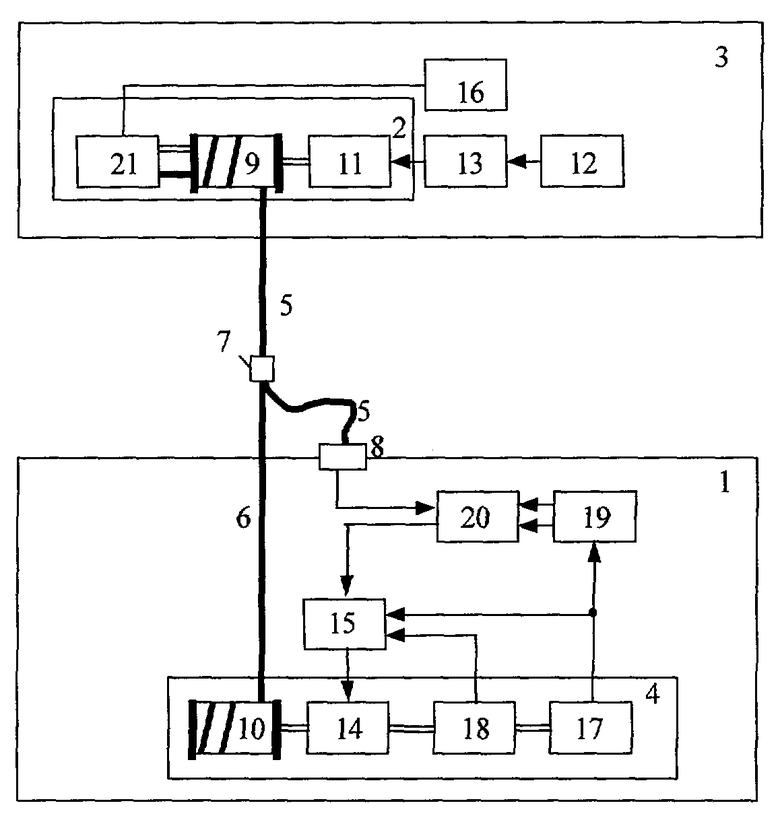
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| 1979 |
|
SU826538A1 | |
| СИСТЕМА ДЛЯ ПОДНЯТИЯ ОБЪЕКТОВ С МОРСКОГО ДНА | 1994 |
|
RU2096251C1 |
| US 3258247 А, 28.06.1966. | |||

