Изобретение относится к медицинской технике, в частности к самоходным креслам для инвалидов, и может быть использовано для движения по лестничным маршам. Возможно также его использование в других областях техники, например для роботов на колесных шасси, так как устройство является по существу интеллектуальным наземным транспортным средством.
Лестница (лестничные марши) является наиболее распространенным препятствием для инвалидных кресел-колясок и ручных грузовых тележек, а также некоторых роботов.
Недостаток большинства самоходных кресел-колясок - их плохая приспособленность к движению по лестницам, невозможность адаптации к различным профилям лестниц: шагу и высоте их ступеней, проблема стабилизации курса [1 и 2].
Некоторые самоходные инвалидные кресла перемещаются по лестничным маршам при оперативном изменении величины колесной базы, т.е. расстояния между осями передних и задних колес. Это обеспечивается как специальными силовыми механизмами, так и заданием неодинаковых скоростей перемещения осей колес.
Известно самоходное инвалидное кресло, содержащее попарно установленные передние и задние колеса и устройство бесступенчатого изменения колесной базы при преодолении лестничных маршей [3], в котором устройство бесступенчатого изменения колесной базы выполнено в виде механического ручного привода, включающего в себя червячную передачу и цепные приводы.
Однако известное устройство, не относящееся к интеллектуальным транспортным средствам, не позволяет передвигаться по лестничным маршам в автоматическом режиме, требует постоянного ручного управления со стороны водителя-инвалида, монотонной, утомительной физической и умственной его работы, поддержания стабильного прямолинейного курса. Это определяет и относительно низкую среднюю скорость перемещения.
Задачей изобретения является улучшение технико-эксплуатационных характеристик самоходного инвалидного кресла, включая повышение средних скоростей передвижения по лестничным маршам, приспособляемость (адаптацию) к их профилю, стабилизацию прямолинейного курса, информативность устройства как интеллектуального транспортного средства, а также облегчение условий эксплуатации, снижение утомляемости водителя-инвалида.
Решение поставленной задачи обеспечивается тем, что в самоходном инвалидном кресле, содержащем попарно установленные передние и задние колеса и устройство бесступенчатого изменения колесной базы при преодолении лестничных маршей, передние и задние колеса установлены на раме, а устройство бесступенчатого изменения колесной базы включает в себя электропривод, связанный с системой управления, в состав которой входят по крайней мере два датчика положения осей передних и задних колес относительно ступеней лестничного марша, при этом датчики выполнены с подвижными частями, установленными с возможностью контакта с ближайшей ступенью.
Решение поставленной задачи обеспечивается также рядом дополнительных отличительных признаков предлагаемого устройства:
система управления содержит датчики положения осей левого и правого одноименных колес, а датчик положения осей другой пары колес выполнен в виде датчика взаимного продольного положения частей рамы или содержит при этом второй датчик положения осей другой пары колес, установленный на соответствующей части рамы;
части рамы связаны телескопически, а один из датчиков положения осей левого и правого одноименных колес выполнен в виде датчика взаимного осевого поворота частей рамы;
датчики положения осей относительно ступеней лестницы установлены в нижних частях рамы и выполнены потенциометрическими, при этом последние могут быть установлены с возможностью подъема и фиксации в верхнем положении на уровне не ниже нижних частей рамы.
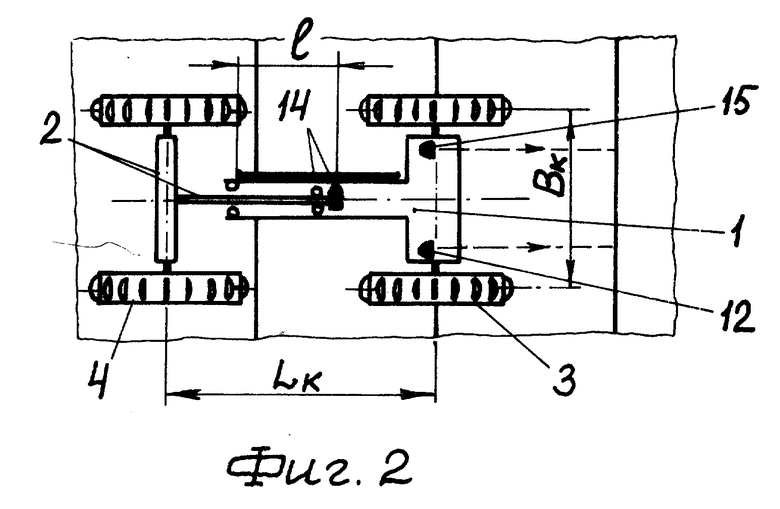
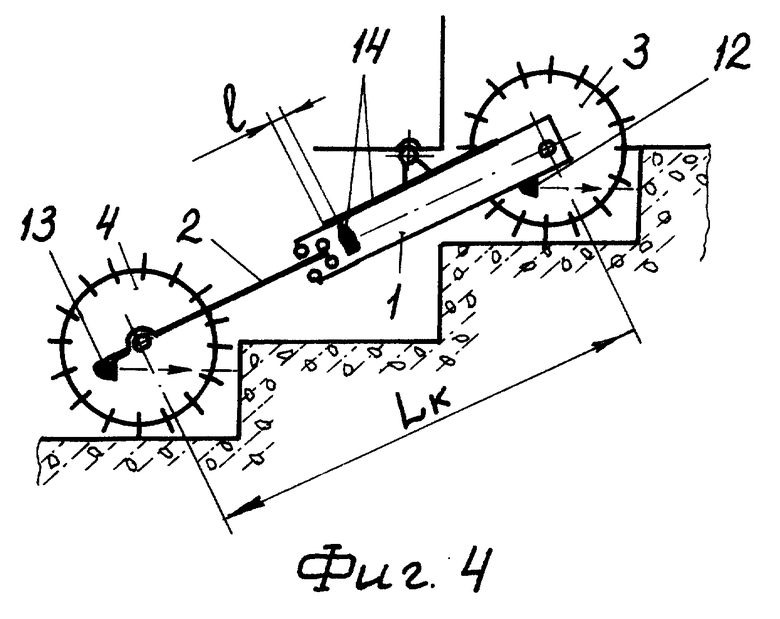
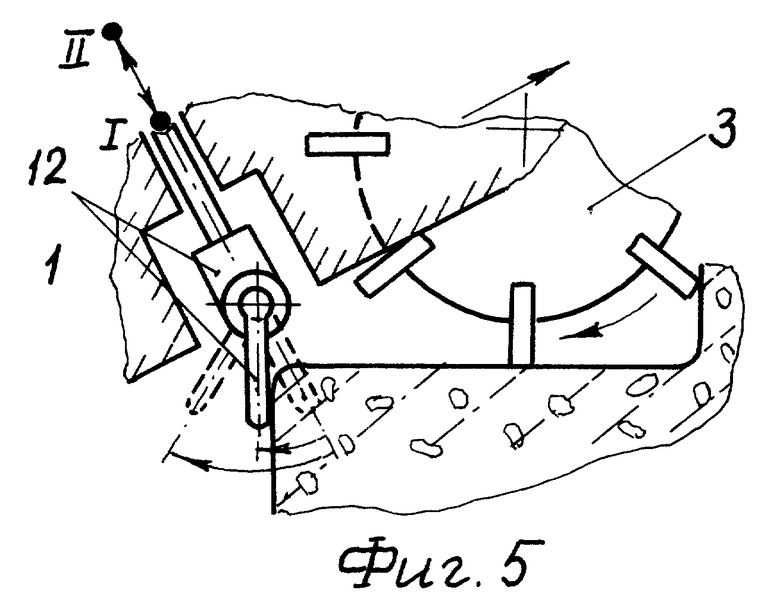
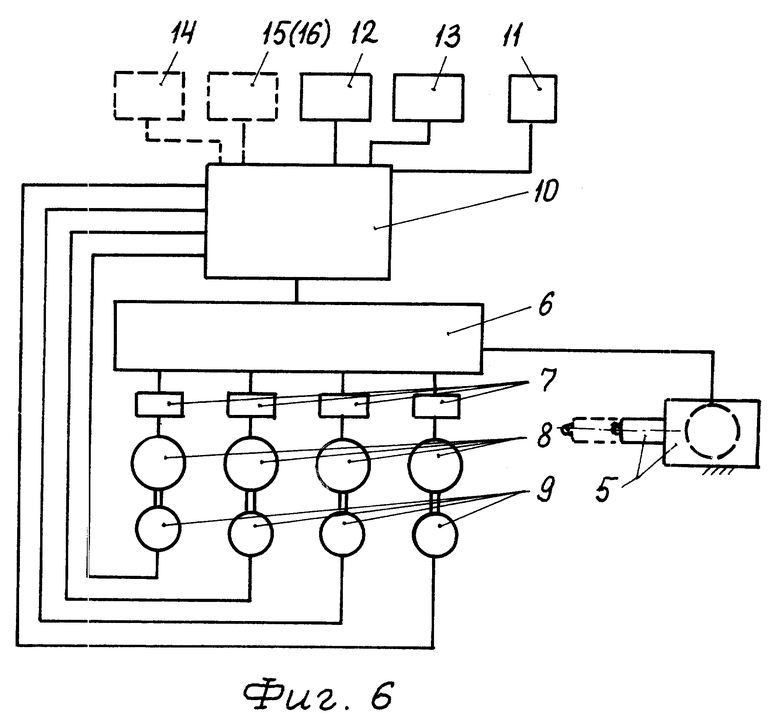
На фиг. 1 схематически изображено самоходное инвалидное кресло, вид сбоку при передвижении вверх по лестничному маршу, вариант с двумя дистанционными датчиками положения осей передних и задних колес; на фиг. 2 - то же, вариант с контактным датчиком взаимного продольного положения частей рамы и дистанционным датчиками положения осей левого и правого одноименных колес; на фиг. 3 - то же, вариант с телескопически связанными частями рамы и с контактными датчиками взаимного продольного положения и углового поворота частей рамы; на фиг. 4 - то же, вариант с дополнительным датчиком (дистанционным) положения осей колес; на фиг. 5 - то же, вариант с подъемными потенциометрическими датчиками, фрагмент вида сбоку; на фиг. 6 - принципиальная схема системы управления электроприводов колес и устройства изменения колесной базы.
Самоходное инвалидное кресло содержит раму, состоящую из двух частей - задней 1 и передней 2 -, которые связаны между собой с возможностью взаимного перемещения, преимущественно телескопически. На части 1 установлены задние колеса 3, на части 2 - передние колеса 4. Приводы вращения колес 3 и колес 4 в общем случае независимы. Предусмотрено устройство бесступенчатого изменения колесной базы (расстояния между осями передних и задних колес) при преодолении лестничных маршей, включающее в себя электропривод 5, связанный с системой управления. Электропривод 5 содержит, например, неподвижное звено, соединенное с частью 1, и выдвижной шток, шарнирно соединенный своим концом с частью 2 рамы (фиг. 1). Система управления включает в себя (фиг. 6) микропроцессорный контроллер 6, подключенный к четырем одинаковым приводам "силовой коммутатор 7 - тяговый электродвигатель 8 колеса - тахогенератор 9" с обратной связью на аналого-цифровой преобразователь (АЦП) 10, а также к электроприводу 5, и датчики положения осей передних 4 и задних 3 колес относительно ступеней лестничного марша (т.е. датчики взаимного положения неповоротной в горизонтальной плоскости оси колеса и поверхностью ступени, включая торец последней), также соединенные с АЦП 10, переключатель 11.
Наличие указанных датчиков является характерной (главной) особенностью данного устройства. Их количество и места установки неоднозначны (варианты). Однако в каждом варианте устройства их минимальное количество - два: датчик 12 положения осей пары задних колес 3, установленный на части 1 рамы, и датчик положения осей пары передних колес 4 относительно лестничного марша. Последний либо аналогичен датчику 12 и установлен на части 2 (датчик 13), либо выполнен в виде датчика взаимного продольного положения частей 1 и 2 рамы (датчик 14), т.е. "датчика базы Lк" с переменной базой l (фиг. 2 и 4) в контакте как функции изменяющей базы Lк. Целесообразно дублирование датчика 12 идентичным датчиком 15, при этом оба эти датчика должны быть установлены с симметричным смещением относительно продольной оси шасси, т.е. разнесены по колее Bк (фиг. 2). При обязательном условии телескопической взаимосвязи частей рам (телескопически связанные между собой части 1 и 2 с трубами) датчик 15 может быть заменен датчиком 16 взаимного осевого поворота частей 1 и 2 рамы, преимущественно контактным, который при этом встроен в полость труб (фиг. 3).
Целесообразен также вариант устройства одновременно со всеми четырьмя датчиками 12 - 15 (16).
В принципе, датчики могут быть любого типа (контактные или бесконтактные, т. е. дистанционные, например, ультразвуковые), обеспечивающие контролируемое изменение выходного сигнала при изменении расстояния между неподвижными частями датчиков и неподвижной системой координат (ступнями лестничного марша) и между частями 1 и 2 рамы. В данном же устройстве конкретизируется вариант с использованием наиболее дешевых и доступных - потенциометрических. Потенциометрические датчики контроля расстояния до ступеней лестницы должны быть установлены в нижних частях рамы с возможностью контакта с "текущей" близлежащей ступенью подвижными своими частями (фиг. 5). Потенциометрические датчики 12, 13 и 15 при необходимости могут быть установлены с возможностью подъема и фиксации в верхнем положении на уровне не ниже нижних частей рамы (фиг. 5).
Предлагаемое устройство работает следующим образом.
Самоходное инвалидное кресло поднимается (спускается) по лестничному маршу за счет вращения колес 3 и 4 при оперативно изменяющейся базе Lк в автоматическом режиме. Водитель-инвалид лишь в начальный момент включает переключатель режимов 11 в режим "Автоматическое передвижение по лестничному маршу". Алгоритм передвижения реализуется за счет включения-выключения электропривода 5, развивающего усилие, определенное по условию сцепления колес со ступенями, и /или/ управления скоростями тяговых электродвигателей 8, которое осуществляется микропроцессорным контроллером 6 согласно программе с использованием информации, поступающей с опрашиваемых датчиков. Координаты положения осей пары задних колес 3 контролируются датчиком 12 (15), координаты положения пары передних колес 4 - датчиком 13 и /или/ 14. При этом датчик 14 контролирует взаимное продольное смещение частей 1 и 2 и тем самым косвенно, в сочетании с датчиком 12, контролирует положение пары колес 4 относительно ступеней лестничного марша. Наличие сразу трех датчиков 12, 13 и 14 расширяет технико-эксплуатационные возможности устройства, позволяя адаптироваться к лестничным маршам различных типоразмеров без изменения алгоритма управления. Установка разнесенных датчиков 12 и 15 еще в большей степени расширяет технико-эксплуатационные возможности: вероятный незапланированный разворот шасси влево или вправо (отклонение от прямолинейного курса) вызывает рассогласование сигналов датчиков 12 и 15, причем пропорциональное отклонению от курса. В варианте с датчиком 16 вместо датчика 15 (фиг. 3) отклонение от прямолинейного курса приводит к появлению сигнала от датчика 16, пропорциональному взаимному осевому повороту частей 1 и 2 (телескопических труб). Величина этих сигналов пропорциональна отклонению от курса. Соответственно, автоматически производится компенсация путем ускоренного вращения двигателей 8 отстающих колес 3 и 4. Взаимосвязь между положением подвижных частей потенциометрических датчиков (фиг. 5) и текущими координатами шасси производится путем предварительного тарирования датчиков. При выполнении датчиков с возможностью подъема их выводят из рабочего (опущенного) положения вне лестничных маршей, чтобы не ухудшать профильную проходимость и уменьшить вероятность их повреждения.
Описанный пример, подтверждающий возможность осуществления изобретения, не исключает других вариантов конкретного выполнения в рамках формулы изобретения.
Использование изобретения позволяет улучшить технико-эксплуатационные характеристики самоходного инвалидного кресла (повысить, в частности, средние скорости передвижения по лестничным маршам, приспособляемость к профилю лестничного марша, стабильность прямолинейного курса и информативность устройства как интеллектуального транспортного средства), а также облегчить условия эксплуатации, снизить утомляемотсь водителя-инвалида.
Источники информации:
1. Патент США N 4645222, кл. B 62 B 9/06, 1987.
2. Патент США N 4790548, кл. B 62 B 9/06, 1988.
3. Патент РФ N 2033125, кл. A 61 G 5/06, 1995 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДВИЖЕНИЯ САМОХОДНОГО ИНВАЛИДНОГО КРЕСЛА ПО ЛЕСТНИЧНЫМ МАРШАМ | 1996 |
|
RU2116061C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042557C1 |
| ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ДВИЖЕНИЯ, В ЧАСТНОСТИ, ПО ЛЕСТНИЦАМ | 2005 |
|
RU2312788C2 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |

Самоходное инвалидное кресло относится к медицинской технике и может быть использовано для движения по лестничным маршам. Возможно также его использование и в других областях техники, например для роботов на колесных шасси. Две рамы 1 и 2 связаны между собой с возможностью взаимного перемещения. Передние 4 и задние 3 колеса установлены попарно на рамах. Имеется также устройство бесступенчатого изменения колесной базы при преодолении лестничных маршей, которое включает в себя электропривод 5, связанный с системой управления. В состав системы управления входят по крайней мере два датчика 12 и 13 положения осей передних 4 и задних 3 колес относительно ступеней лестничного марша. Датчики 12 и 13 выполнены с подвижными частями, установленными с возможностью контакта с ближайшей ступенью, улучшая технико-эксплуатационные характеристики кресла, облегчая условия его эксплуатации и снижая утомляемость инвалида. 5 з.п.ф-лы, 6 ил.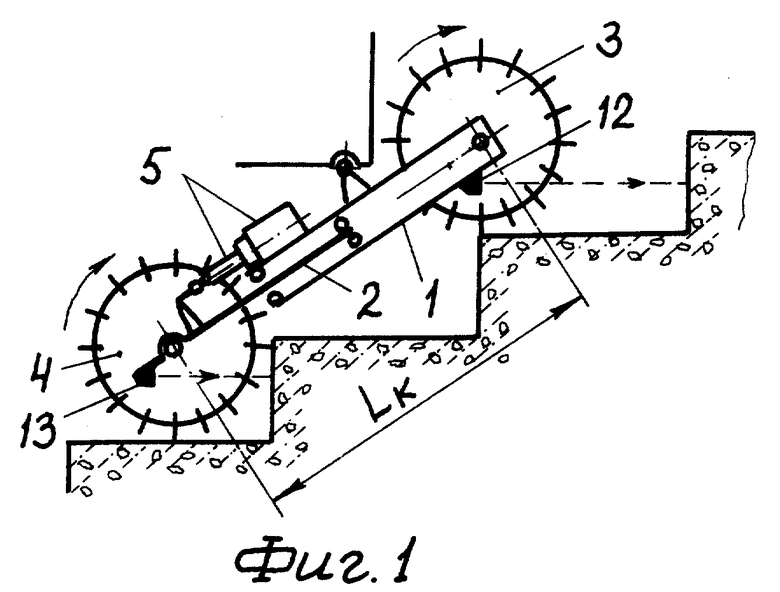
| SU, 1662552 A1, 13.07.91, A 61 G 5/06 | |||
| SU, 1685436 A1, 23.10.91, A 61 G 5/06 | |||
| SU, 1787435 A1, 15.01.93, A 61 G 5/06. |
