Изобретение относится к наземным транспортным средствам и, одновременно, к реабилитационной (медико-реабилитационной) технике (преимущественно инвалидным креслам-коляскам), предназначенным для перемещения человека по лестницам или ровной поверхности.
Наиболее существенной, актуальной проблемой на пути создания мобильных технических средств реабилитации (TCP) является проблема передвижения лиц с ограниченными физическими возможностями по лестницам (лестничным маршам).
Среди специализированных TCP известны управляемые здоровым сопровождающе-управляющим человеком (далее - ассистентом) мобильные лестничные подъемники (они же - коляски) - транспортные средства с креслом, рамой, колесами, механизмами подъема, причем как зарубежные [GB 2290757, A61G 7/10, В62В 1/22, A61G 5/00, 7/10, 10.01.1996; SU 1607806 А1, A61G 5/06, 23.11.1990; Elektrische Treppensteiger. Hersteller / Manufacturer SANO Trasportgeraete GmbH. - Am Hoizpoldigut 22 4040 Linz/Lichtenberg. AUSTRIA. (Каталог австрийской фирмы SANO. - 15 с. - Продукт сети Интернет: http://www.sano-stair-climber.com; www.sano-treppensteighilfe.com): S-max - der Treppensteiger fur Ihren Rollstuhl. AAT Alber Antriebstechnik GmbH/Postfach 10 0560 D-72426 Albstadt. (Каталог S-MAX германской фирмы AAT. - 8 с. - Продукт сети Интернет: http://www.aat-online.de): S-max - der universalle Treppensteiger. AAT Alber Antriebstechnik GmbH/Postfach 10 0560 D-72426 Albstadt. (Каталог S-MAX германской фирмы AAT. - 8 с. - Продукт сети Интернет: http://www.aat-online.de)], так и отечественные (авторские разработки) [RU 2304952 C1, A61G 5/06, B62B 11/00, 27.08.2007; RU 2368366 C1, A61G 5/06, 19.02.2008].
Реализуемый с их помощью способ перемещения по лестницам заключается во взаимодействии шагающего движителя, установленного наряду с пассивными (неприводными) колесами (между колесами), со ступенями лестницы. При этом характерной особенностью способа является обеспечение (действиями ассистента) положения коляски в возможно более полном динамическом равновесии (включая смещение и удержание центра масс в поперечной вертикальной плоскости, проходящей через центры пятен контакта ходовой части с лестницей). Функции ассистента сводятся, в общем, к удержанию коляски в балансе, подстраховке пользователя, корректировке курса и некоторой помощи по маневрированию на лестничных площадках.
В то же время, наличие ассистента, к тому же относительно здорового физически и психически, далеко не всегда возможно и, в ряде случаев, нецелесообразно. Соответственно, у пользователя подобными TCP должна иметься принципиальная возможность уверенно и безопасно перемещаться самостоятельно, без ассистента. Хотя бы при условии предварительной подготовки (обучения) пользователя и даже, если необходимо, определенных требований к психофизическому состоянию.
Наиболее близким к заявленному изобретению по назначению и совокупности существенных признаков (прототипом) является способ перемещения человека с дисфункцией нижних конечностей в самоходной коляске на лестнице с поручнями (и транспортное средство для его осуществления), заключающийся в движении по лестнице в сидячем, в кресле, положении человека-пользователя коляски, за счет рычажного шагающего движителя с электромеханическим приводом, при котором опору на ступени лестницы осуществляют попеременно либо парой вращающихся рычагов, либо парой колес [RU 2368366 C1, A61G 5/06, 19.02.2008 - прототип]. В нем для преодоления лестничного марша вверх ассистент подвозит коляску с зафиксированным в кресле (посредством ремня безопасности и фиксаторов ног, по крайней мере, в продольном и поперечном вертикальном направлениях) к первой нижней ступени лестничного марша задним ходом до упора колесами в край ступени, включает шагающий движитель в режиме заднего хода и сразу после упора рычагов сверху в опорную поверхность ступени переводит коляску, посредством рукояток, в устойчивое, по своим ощущениям, двухопорное, на рычагах, положение «баланс» и продолжает поддерживать достигнутое положение динамического равновесия (баланс в движении) с попеременным контактом рычагов и колес до полного преодоления лестничного марша в режиме, как правило, непрерывной работы привода шагающего движителя или вынужденной остановки.
Для преодоления лестничного марша вниз ассистент подвозит коляску к первой верхней ступени лестничного марша передним ходом до предельной безопасной дистанции (в случае меньшей дистанции автоматические тормоза остановят коляску), включает шагающий механизм в режиме переднего хода и при опоре коляски на рычаги переводит коляску, посредством рукояток, в устойчивое, по своим ощущениям, двухопорное положение «баланс» (аналогично тому, как это описано в реализации режима движение по лестнице вверх) и продолжает поддерживать положение «баланс» до полного преодоления лестничного марша или вынужденной остановки.
Однако и такому устройству свойственны описанные выше недостатки.
Задачей, на решение которой направлено заявленное изобретение, является обеспечение возможности самостоятельного (без помощи ассистента) перемещения пользователя в коляске по лестничным маршам.
Решение поставленной задачи достигается тем, что в способе перемещения человека с дисфункцией нижних конечностей в самоходной коляске на лестнице с поручнями, заключающемся в движении по лестнице в сидячем, в кресле, положении человека-пользователя коляски, за счет рычажного шагающего движителя с электромеханическим приводом, при котором опору на ступени лестницы осуществляют попеременно либо парой вращающихся рычагов, либо парой колес, для преодоления лестничного марша вверх человек-пользователь коляски подъезжает к первой нижней ступени лестничного марша задним ходом до упора колесами в край ступени, включает или переключает питание электродвигателя в ждущий режим, фиксирует свои тело и, при необходимости, ноги относительно коляски, по крайней мере, в продольном и поперечном вертикальном направлениях, например ремнем безопасности и фиксаторами ног, если они не были зафиксированы ранее, включает привод шагающего движителя в режиме заднего хода и выключает его после упора рычагов в опорную поверхность ступени, переводит коляску в устойчивое, по своим ощущениям, двухопорное, на рычагах, положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем лестничного марша, преимущественно в режиме хвата кистями, включает привод шагающего движителя в режиме заднего хода и продолжает поддерживать положение «баланс» с попеременным контактом рычагов и колес до полного преодоления лестничного марша в режиме, как правило, непрерывной работы привода шагающего движителя или вынужденной остановки, а для преодоления лестничного марша вниз человек-пользователь коляски подъезжает к первой верхней ступени лестничного марша передним ходом до безопасной, по условию устойчивости, дистанции, включает или переключает питание электродвигателя в ждущий режим, фиксирует свои тело и, при необходимости, ноги относительно коляски, по крайней мере, в продольном и поперечном вертикальном направлениях, например ремнем безопасности и фиксаторами ног, если они не были зафиксированы ранее, переводит коляску в устойчивое, по своим ощущениям, двухопорное положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем лестницы, преимущественно в режиме хвата кистями и включает привод шагающего движителя в режиме переднего хода, после чего продолжает поддерживать положение «баланс» до полного преодоления лестничного марша или вынужденной остановки.
Решение поставленной задачи достигается также за счет дополнительных существенных признаков способа (при сформулированной выше основной совокупности признаков):
- подъезд к первой нижней ступени лестничного марша задним ходом человек-пользователь может осуществлять посредством привода шагающего движителя, а подъезд к первой верхней ступени лестничного марша передним ходом - на колесах, например за счет мускульной силы верхних конечностей и торса;
- человек-пользователь может подъезжать к первой нижней ступени лестничного марша задним ходом за счет подтягивания верхними конечностями за сгоны поручней;
- человек-пользователь может включать привод шагающего движителя в режимах переднего и заднего ходов путем определенного поворота и/или наклона головы на относительно большой, достаточный для исключения случайных срабатываний, угол при наличии системы управления на основе датчика Холла или аналогичных устройств, или путем подачи голосовой команды при наличии системы управления на основе голосового интерфейса, или иным аналогичным способом;
- при третьей дополнительной совокупности признаков по преодолении первой нижней и/или верхней ступени человек-пользователь может выключить привод шагающего движителя поворотом и/или наклоном головы в обратную сторону или подачей альтернативной голосовой команды или отключающей командой иного способа управления, выдержать, при необходимости, паузу для психофизиологического закрепления приобретенных таким образом навыков управления равновесием и движением, снова включить привод шагающего движителя и осуществить шагание в таком режиме, по крайней мере, еще на одну ступень, в зависимости от необходимой и достаточной степени приобретенных навыков и индивидуальных особенностей, после чего включить привод шагающего движителя в режиме, как правило, непрерывной работы до полного преодоления лестничного марша или вынужденной остановки;
- при третьей дополнительной совокупности признаков привод шагающего движителя в непрерывном режиме его работы человек-пользователь может включить путем перевода, например ручным тумблером или определенным движением головы, отличным от движений, включающих-выключающих привод, системы управления в другом режиме, при котором привод включается упомянутым поворотом и/или наклоном головы, а выключается повторным ее поворотом или наклоном, то есть в ту же сторону, с предварительным возвратом в исходное положение, после чего включить привод, повернуть голову в исходное положение, а по завершении преодоления лестничного марша, или в случае необходимости промежуточной остановки, выключить привод очередным поворотом головы;
- при третьей дополнительной совокупности признаков привод шагающего движителя в непрерывном режиме его работы человек-пользователь может включить путем перевода, например ручным тумблером или голосовой командой, отличной от команд, включающих-выключающих привод;
- по завершении шагового перемещения на очередную ступень в направлении подъема или спуска коляски хват поручня кистью верхней конечности в момент опоры на колеса при вывешенных рычагах шагающего движителя пользователь может переносить в направлении перемещения коляски по лестнице примерно на величину указанного шагового перемещения, при этом, в случае хвата обеими кистями одного поручня, хват кистями он может переносить поочередно;
- для преодоления лестничного марша вниз человек-пользователь может подъехать к первой верхней ступени лестничного марша передним ходом до безопасной, по условию не срыва со ступени, дистанции, обеспечиваемой автоматической тормозной системой.
Среди известных способов перемещения на лестнице на устройствах такого типа не обнаружены способы, совокупность существенных признаков которых совпадала бы с заявленной. В то же время именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
На чертеже изображен процесс преодоления лестничного марша (пример с одним поручнем): транспортное средство (с пользователем) на ступени лестницы при движении вверх сразу после перевода коляски в положение «баланс» и последующего включения шагающего движителя, или при регулярном движении вверх или вниз, вид снизу-сбоку.
Коляска - лестничный подъемник, преимущественно для перемещения человека по лестницам, содержит кресло 1 для человека-пользователя 2, раму 3, желательно переменной высоты, предпочтительно телескопической (с фиксатором в укороченном и в удлиненном положениях), с рукоятками 4, 5 на верхнем ее конце для удобства регулирования высоты расположения рукояток (выдвижения телескопа) и принципиальной возможности транспортировки коляски с человеком 2 или без него, при необходимости, ассистентом, и соосные (оси 6-7) неприводные (пассивные) колеса 8, 9 на нижнем ее конце (по левому и правому бортам коляски), как минимум один вынесенный вперед дополнительный опорный элемент типа рояльного колеса (в данных примерах это два поворотных относительно вертикальных осей колеса 10, 11). Коляска снабжена двухопорным (одновременно слева и справа по ширине коляски) рычажным шагающим движителем с электромеханическим приводом 12 (как правило, электродвигатель с редуктором, связанные с автономным источником электропитания), установленным наряду с колесами 8, 9 (т.е. в дополнение к ним), при котором опору на ступени лестницы осуществляют попеременно либо указанной парой вращающихся рычагов 13, 14 (разнесенных вдоль оси 6-7 колес 8, 9, т.е. по левому и правому бортам), либо парой колес 8, 9. Как правило, каждый из рычагов 13, 14 выполнен двуплечим и установлен со смещением (эксцентриситетом) относительно оси 6-7 в поперечных направлениях в пределах радиуса колес 8, 9, а концы рычага выступают (по меньшей мере, на части своей траектории) за внешние окружности колес 8, 9 для взаимодействия с ближайшей свободной от колес 8, 9 ступенью лестницы 15 (подробнее устройство описано в прототипе, с.7, фиг.4).
Более того, рычаги 13, 14 установлены с возможностью реверсируемого вращения от электропривода 12 (привод 12 выполнен реверсивным) в направлении всхода на вышестоящую ступень лестницы 15 или спуска с нее, вокруг оси 16, фиксированной, относительно рамы 3. Таким образом, рычаги 13, 14 установлены с возможностью сложного движения в пространстве - одновременно силового поворота в плоскостях, параллельных плоскостям вращения колес 8, 9, и, вследствие опоры на ступень, поступательного движения (со всей коляской).
На концах рычагов 13, 14 установлены опорные фрикционные элементы 17 с оптимизированными формой и размерами (как у ближайших аналогов).
В составе транспортного средства имеются автоматические тормоза. Они включают в себя рычаги 18, 19 с опорными роликами 20, 21 на своих свободных концах, служащие датчиками положения колес 8, 9 на опорной ступени 15 относительно ее кромки, шарнирно установленные сбоку-спереди колес 8, 9 с возможностью принудительного перевода из нерабочего верхнего положения в рабочее нижнее с качением роликов по ступени 15 рядом с колесами и последующего срыва под действием, наряду с собственной силой тяжести, силой упругости предусмотренной для этого пружины и зависания над нижестоящей ступенью. В нижнем (рабочем) положении вывешенные рычаги 18, 19 имеют возможность блокировать вращение колес 8, 9 (как в прототипе, с.8, фиг.2). Возможно иное устройство блокировки вращения колес 8, 9 на предельно безопасном, по условию не срыва колес 8, 9 со ступени 15, расстоянии s (не показано), достаточном для начала эффективной работы механизма перемещения по ступеням лестницы в режиме спуска со ступени.
В состав коляски могут входить также средства изменения взаимного расположения ее элементов (включая ряд упомянутых выше), средства управления коляской и контроля ее параметров. В составе коляски как разновидности TCP должны входить также поясной ремень безопасности и фиксаторы ног (желательно откидные подножки со стоподержателями или без них и/или фиксаторы голеней). Рекомендуется также наличие "стояночного" механического тормоза (механических тормозов).
У лестницы (при лестнице) обязательно должны быть поручни (перила) 22, с одной или с двух ее сторон.
В заявляемом способе (в предпочтительном его варианте) особенно важно наличие в составе средств управления коляской наличие системы управления (устройства 23) на основе датчика Холла или аналогичных устройств, либо варианты голосового интерфейса и т.п.
Описанный пример конкретного варианта конструкции (ранее запатентованной авторами) не исключает других возможных вариантов устройства для реализации заявляемого способа в рамках совокупности существенных его признаков (см. формулу изобретения).
Заявляемое устройство работает следующим образом (в соответствии с заявляемым способом).
Человек-пользователь 2 находится в кресле 1 и для преодоления лестничных маршей в любом направлении должен быть, как правило, зафиксирован от перемещений тазовой части тела и нижних конечностей посредством упомянутых ремня безопасности и фиксаторов ног (подножек со стоподержателями или без них, и/или фиксаторов голеней).
Описанные ниже действия по включению и выключению привода 12 пользователь 2 осуществляет (в данном конкретном примере) путем поворота головы (и, соответственно, датчика Холла устройства 23) по- или против часовой стрелке (как вариант, выключение - повторным поворотом головы по часовой стрелке, т.е. через раз).
Для преодоления лестничного марша вверх пользователь 2 совершает следующую последовательность операций:
- подъезжает в коляске к первой нижней ступени лестничного марша 15 задним ходом до упора колесами в край ступени, включает или переключает питание электродвигателя привода 12 в ждущий режим, фиксирует тело и, при необходимости, ноги относительно коляски, по крайней мере, в продольном и поперечном вертикальном направлениях, например ремнем безопасности и фиксаторами ног, если они не были зафиксированы ранее;
- включает привод 12 шагающего движителя в режиме заднего хода и выключает его после упора рычагов в опорную поверхность ступени 15 (об упоре рычагов в ступень пользователь может судить по своим ощущениям, визуально, с возможным использованием зеркала и т.д. (в данном случае конкретика непринципиальна));
- переводит коляску в устойчивое, по своим ощущениям, двухопорное, на рычагах, положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем 22 лестничного марша, преимущественно в режиме хвата кистями;
- включает привод 12 шагающего движителя в режиме заднего хода;
- продолжает поддерживать положение «баланс» с попеременным контактом рычагов 13, 14 и колес 8, 9 до полного преодоления лестничного марша в режиме («регулярном») непрерывной (предпочтительно) или периодической (с «индивидуальной для каждого пользователя скважностью») работы привода 12 шагающего движителя или вынужденной остановки.
Для преодоления лестничного марша вниз пользователь 2 совершает следующую последовательность операций:
- подъезжает в коляске к первой верхней ступени лестничного марша 15 передним ходом до безопасной, по условию продольной устойчивости, т.е. не срыву колес 8. 9 со ступени 15, дистанции s, включает или переключает питание электродвигателя привода 12 в ждущий режим, фиксирует свои тело и, при необходимости, ноги относительно коляски, по крайней мере, в продольном и поперечном вертикальном направлениях, например ремнем безопасности и фиксаторами ног, если они не были зафиксированы ранее;
- переводит коляску в устойчивое, по своим ощущениям, двухопорное положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем 22 лестницы, преимущественно в режиме хвата кистями;
- включает привод 12 шагающего движителя в режиме переднего хода (две последние операции пользователь может осуществлять практически одновременно);
- продолжает поддерживать положение «баланс» (см. фигуру) до полного преодоления лестничного марша (регулярный или индивидуально выбираемый режимы) или вынужденной остановки.
В числе отличий заявляемого способа выделяются следующие необязательные, но рекомендуемые (предпочтительные) операции:
- подъезд к первой нижней ступени лестничного марша 15 задним ходом пользователь 2 может осуществлять посредством привода 12, а подъезд к первой верхней ступени лестничного марша 15 передним ходом - на колесах 8, 9, например за счет мускульной силы верхних конечностей и торса пользователя 2;
- пользователь 2 может подъезжать к первой нижней ступени лестничного марша 15 задним ходом за счет подтягивания верхними конечностями за сгоны поручней 22;
- пользователь 2 может включать привод 12 в режимах переднего и заднего ходов путем определенного поворота и/или наклона головы на относительно большой, достаточный для исключения случайных срабатываний, угол при наличии системы управления (устройства 23) на основе датчика Холла или аналогичных устройств, или путем подачи голосовой команды при наличии системы управления (устройства) на основе голосового интерфейса, или иным аналогичным способом;
- по преодолении первой нижней и/или верхней ступени 15 пользователь 2 может выключить привод 12 поворотом и/или наклоном головы в обратную сторону или подачей альтернативной голосовой команды или отключающей командой иного способа управления, выдержать, при необходимости, паузу для психофизиологического закрепления приобретенных таким образом навыков управления равновесием и движением, снова включить привод 12 и осуществить шагание на рычагах 13, 14 в таком режиме, по крайней мере, еще на одну ступень 15, в зависимости от необходимой и достаточной степени приобретенных навыков и индивидуальных особенностей, после чего включить привод 12 в режиме непрерывной работы до полного преодоления лестничного марша или вынужденной остановки;
- привод 12 в непрерывном режиме его работы пользователь 2 может включить путем перевода, например ручным тумблером (не показан) или определенным движением головы, отличным от движений, включающих-выключающих привод 12, системы управления (устройством 23) в другом режиме, при котором привод 12 включается упомянутым поворотом и/или наклоном головы, а выключается повторным ее поворотом или наклоном, то есть в ту же сторону, с предварительным возвратом в исходное положение, после чего включить привод 12, повернуть голову в исходное положение, а по завершении преодоления лестничного марша, или в случае необходимости промежуточной остановки, выключить привод 12 очередным поворотом головы (о чем кратко упоминалось выше);
- по завершении шагового перемещения на очередную ступень 15 в направлении подъема или спуска коляски хват поручня 22 кистью верхней конечности в момент опоры на колеса 8, 9 при вывешенных рычагах 13, 14 шагающего движителя пользователь 2 может перенести в направлении перемещения коляски по лестнице 15 примерно на величину указанного шагового перемещения (отношение длины ступени 15 к косинусу угла наклона поручней 22), при этом, в случае хвата обеими кистями одного поручня 22, хват кистями перенести поочередно.
Использование заявляемого способа позволяет пользователю перемещаться по лестничным маршам самостоятельно, без помощи ассистента.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ И НА ЭСКАЛАТОРАХ | 2012 |
|
RU2510347C2 |
| Складная аппарель бытового и эвакуационного назначения | 2015 |
|
RU2610937C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО, ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2011 |
|
RU2459605C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2005 |
|
RU2304952C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2297206C2 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
Изобретение относится к наземным транспортным средствам, преимущественно инвалидным креслам-коляскам, предназначенным для перемещения человека по лестницам или ровной поверхности. Способ заключается в движении по лестнице в сидячем в кресле положении человека-пользователя коляски за счет рычажного шагающего движителя с электромеханическим приводом. Опору на ступени лестницы осуществляют попеременно либо парой вращающихся рычагов, либо парой колес. Для преодоления лестничного марша вверх человек-пользователь коляски подъезжает к первой нижней ступени лестничного марша задним ходом до упора колесами в край ступени, включает или переключает питание электродвигателя в ждущий режим и фиксирует, при необходимости, свое тело. Затем включает привод шагающего движителя в режиме заднего хода и выключает его после упора рычагов в опорную поверхность ступени. Переводит коляску в устойчивое, двухопорное, на рычагах, положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем лестничного марша, преимущественно в режиме хвата кистями. Затем включает привод шагающего движителя в режиме заднего хода и продолжает поддерживать положение «баланс» с попеременным контактом рычагов и колес до полного преодоления лестничного марша. Преодоление лестничного марша вниз осуществляется аналогичным образом и отличается тем, что подъезд коляски человека-пользователя к первой верхней ступени лестничного марша осуществляется передним ходом. Технический результат: возможность самостоятельного перемещения пользователя в коляске по лестничным маршам без помощи ассистента. 8 з.п. ф-лы, 1 ил.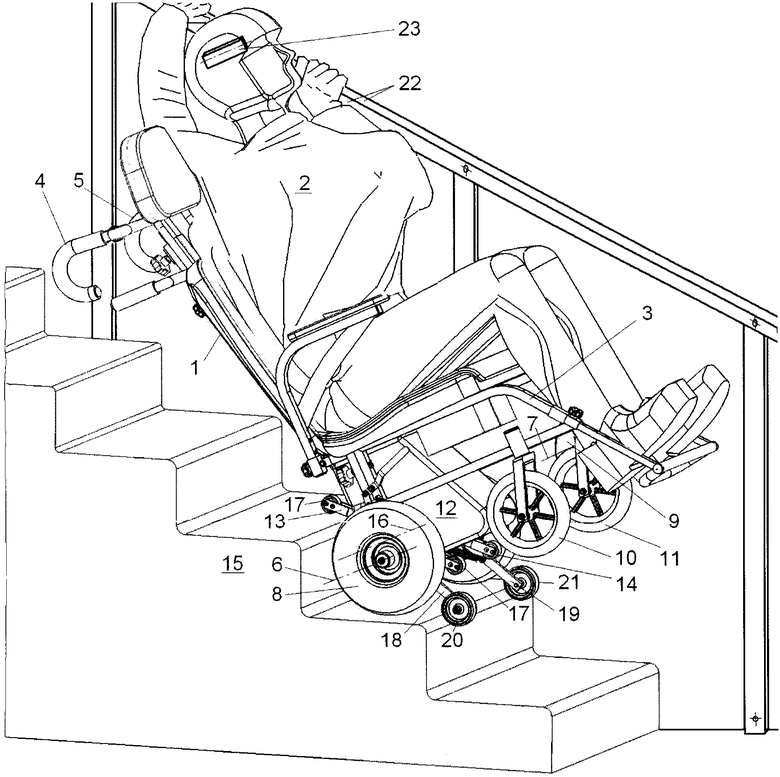
1. Способ перемещения человека с дисфункцией нижних конечностей в самоходной коляске на лестнице с поручнями, заключающийся в движении по лестнице в кресле, в сидячем положении человека-пользователя коляски за счет рычажного шагающего движителя с электромеханическим приводом, при котором опору на ступени лестницы осуществляют попеременно либо парой вращающихся рычагов, либо парой колес, отличающийся тем, что для преодоления лестничного марша вверх человек-пользователь коляски подъезжает к первой нижней ступени лестничного марша задним ходом до упора колесами в край ступени, включает или переключает питание электродвигателя в ждущий режим, фиксирует свои тело и при необходимости ноги относительно коляски, по крайней мере, в продольном и поперечном вертикальном направлениях, например, ремнем безопасности и фиксаторами ног, если они не были зафиксированы ранее, включает привод шагающего движителя в режиме заднего хода и выключает его после упора рычагов в опорную поверхность ступени, переводит коляску в устойчивое по своим ощущениям двухопорное на рычагах положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем лестничного марша, преимущественно в режиме хвата кистями, включает привод шагающего движителя в режиме заднего хода и продолжает поддерживать положение «баланс» с попеременным контактом рычагов и колес до полного преодоления лестничного марша в режиме, как правило, непрерывной работы привода шагающего движителя или вынужденной остановки, а для преодоления лестничного марша вниз человек-пользователь коляски подъезжает к первой верхней ступени лестничного марша передним ходом до безопасной по условию устойчивости дистанции, включает или переключает питание электродвигателя в ждущий режим, фиксирует свои тело и при необходимости ноги относительно коляски, по крайней мере, в продольном и поперечном вертикальном направлениях, например, ремнем безопасности и фиксаторами ног, если они не были зафиксированы ранее, переводит коляску в устойчивое по своим ощущениям двухопорное положение «баланс» за счет инерционных телодвижений и/или силового взаимодействия, по крайней мере, с одним поручнем лестницы, преимущественно в режиме хвата кистями и включает привод шагающего движителя в режиме переднего хода, после чего продолжает поддерживать положение «баланс» до полного преодоления лестничного марша или вынужденной остановки.
2. Способ перемещения по п.1, отличающийся тем, что подъезд к первой нижней ступени лестничного марша задним ходом человек-пользователь осуществляет посредством привода шагающего движителя, а подъезд к первой верхней ступени лестничного марша передним ходом - на колесах, например, за счет мускульной силы верхних конечностей и торса.
3. Способ перемещения по п.1, отличающийся тем, что человек-пользователь подъезжает к первой нижней ступени лестничного марша задним ходом за счет подтягивания верхними конечностями за сгоны поручней.
4. Способ перемещения по п.1, отличающийся тем, что человек-пользователь включает привод шагающего движителя в режимах переднего и заднего ходов путем определенного поворота и/или наклона головы на относительно большой, достаточный для исключения случайных срабатываний угол при наличии системы управления на основе датчика Холла или аналогичных устройств, или путем подачи голосовой команды при наличии системы управления на основе голосового интерфейса, или иным аналогичным способом.
5. Способ перемещения по п.4, отличающийся тем, что по преодолении первой нижней и/или верхней ступени человек-пользователь выключает привод шагающего движителя поворотом и/или наклоном головы в обратную сторону или подачей альтернативной голосовой команды или отключающей командой иного способа управления, выдерживает при необходимости паузу для психофизиологического закрепления приобретенных таким образом навыков управления равновесием и движением, снова включает привод шагающего движителя и осуществляет шагание в таком режиме, по крайней мере, еще на одну ступень в зависимости от необходимой и достаточной степени приобретенных навыков и индивидуальных особенностей, после чего включает привод шагающего движителя в режиме, как правило, непрерывной работы до полного преодоления лестничного марша или вынужденной остановки.
6. Способ перемещения по п.4, отличающийся тем, что привод шагающего движителя в непрерывном режиме его работы человек-пользователь включает путем перевода, например, ручным тумблером или определенным движением головы, отличным от движений, включающих-выключающих привод, системы управления в другом режиме, при котором привод включается упомянутым поворотом и/или наклоном головы, а выключается повторным ее поворотом или наклоном, то есть в ту же сторону с предварительным возвратом в исходное положение, после чего включает привод, поворачивает голову в исходное положение, а по завершении преодоления лестничного марша или в случае необходимости промежуточной остановки выключает привод очередным поворотом головы.
7. Способ перемещения по п.4, отличающийся тем, что привод шагающего движителя в непрерывном режиме его работы человек-пользователь включает путем перевода, например, ручным тумблером или голосовой командой, отличной от команд, включающих-выключающих привод.
8. Способ перемещения по п.1, отличающийся тем, что по завершении шагового перемещения на очередную ступень в направлении подъема или спуска коляски хват поручня кистью верхней конечности в момент опоры на колеса при вывешенных рычагах шагающего движителя пользователь переносит в направлении перемещения коляски по лестнице примерно на величину указанного шагового перемещения, при этом в случае хвата обеими кистями одного поручня хват кистями он переносит поочередно.
9. Способ перемещения по п.1, отличающийся тем, что для преодоления лестничного марша вниз человек-пользователь подъезжает к первой верхней ступени лестничного марша передним ходом до безопасной по условию не срыва со ступени дистанции, обеспечиваемой автоматической тормозной системой.
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| Способ передвижения инвалидной коляски и инвалидная коляска | 1988 |
|
SU1602529A1 |
| RU 2055560 C1, 10.03.1996 | |||
| СПОСОБ ПЕРЕДВИЖЕНИЯ САМОХОДНОГО ИНВАЛИДНОГО КРЕСЛА ПО ЛЕСТНИЧНЫМ МАРШАМ | 1996 |
|
RU2116061C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
| СПОСОБ ОБУЧЕНИЯ УПРАВЛЕНИЮ КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2173892C1 |

