Изобретение относится к наземным транспортным средствам (преимущественно инвалидным креслам-коляскам), предназначенным для перемещения человека или груза по лестницам с ассистентом (лестничным маршам зданий, сооружений, авиационным и корабельным трапам и т.д.) или ровной поверхности (с ассистентом или самостоятельно).
Наиболее существенной, актуальной проблемой на пути создания мобильных технических средств реабилитации (TCP) является проблема передвижения лиц с ограниченными физическими возможностями по лестницам и преодоления др. профильных препятствий типа поребрика.
Среди специализированных TCP известны управляемые здоровым сопровождающе-управляющим человеком (далее - ассистентом) мобильные лестничные подъемники - транспортные средства с рамой, колесами, механизмами подъема [1].
Известны также, как аналоги, транспортные средства для перемещения человека по лестницам, содержащие несущую раму с рукоятками на верхнем конце для транспортирующего человека и соосные колеса на нижнем ее конце, вынесенные в направлении заднего хода транспортного средства дополнительные опорные элементы типа рояльного колеса, устройство подъема по лестнице, включающее источник автономного питания, электромеханический привод и разнесенные по ширине опорные рычаги с выступающими за внешние окружности соосных колес рабочими концами для взаимодействия с ближайшей свободной от соосных колес ступенью лестницы и торможения ориентированными вниз опорными костылями (механические тормоза), установленные с возможностью поворота или более сложного движения в плоскостях, параллельных плоскостям вращения соосных колес [2-5].
Опорные костыли ухудшают дорожный просвет и снижают профильную проходимость транспортных средств. При этом все они относительно дороги, особенно для большинства российских потенциальных пользователей (примерно $ 10000).
Наиболее близким к заявленному изобретению по назначению и совокупности конструктивных признаков (прототипом) является транспортное средство для перемещения человека по лестницам, содержащее кресло для размещения перемещаемого человека или иное устройство для размещения полезной нагрузки, раму с рукоятками для сопровождающе-управляющего человека, пару основных соосных колес, как минимум одно, вынесенное в направлении заднего хода транспортного средства дополнительное колесо меньшего диаметра, устройство перемещения по ступеням лестницы, в состав которого входят взаимосвязанные источник автономного энерго- (электро-)питания, привод (электромеханический) и опорные рычаги, разнесенные вдоль оси основных колес, смещенные от нее в поперечных направлениях в пределах радиусов колес, выступающие за внешние окружности колес своими концами для взаимодействия со ступенями и возможностью силового поворота и/или вращения в плоскостях, параллельных плоскостям вращения колес, в направлении перемещения транспортного средства задним ходом вверх, устройство обеспечения плавности спуска со ступени и механические тормоза транспортного средства [6].
В нем каждый опорный рычаг выполнен одноплечим или двуплечим (варианты), привод вращения опорных рычагов выполнен нереверсивным, без возможности силового поворота и/или вращения в направлении перемещения транспортного средства передним ходом вниз (спуска со ступени), а специализированное устройство обеспечения плавного спуска со ступени (с лестницы) - в виде демпфера с подвижным и неподвижным звеньями и дополнительного опорного рычага, ориентированного назад от оси колес, один конец которого шарнирно закреплен на несущей раме, а другой шарнирно связан с подвижным звеном демпфера, причем неподвижное звено демпфера зафиксировано на несущей раме. В частных вариантах исполнения устройства демпфер выполнен гидравлическим, концы опорных рычагов снабжены опорными фрикционными элементами, а оси вращения рычагов смещены относительно осей вращения колес на рекомендуемую рациональную величину. Тормоза выполнены неавтоматическими: их включают и выключают принудительно.
Однако и такому устройству свойственны следующие недостатки. Не полностью использованные возможности как повышения плавности и устойчивости хода, так и энергетической разгрузки ассистента в режиме движения вниз по лестнице. Непосредственное использование устройства обеспечения спуска на каждой ступени лестницы сопряжено с необходимостью повышенного внимания и четких своевременных манипуляций рамой со стороны ассистента не исключает, в принципе, случайных фронтальных или однобоких срывов со ступени. Относительно невысока компактность. Имеет место относительная сложность. Недостаточно снижена себестоимость устройства. Не умаляя достоинств, положительных характеристик и практической востребованности таких TCP, приходится отмечать ограничения возможностей удовлетворения потребностей многочисленных лиц, нуждающихся в них, некоторое сдерживание насыщения рынка.
Задачей, на решение которой направлено заявленное изобретение, является улучшение технико-эксплуатационных и экономических (потребительских) характеристик транспортного средства, преимущественно для перемещения человека по лестницам (мобильного лестничного подъемника), за счет повышения плавности и устойчивости движения на лестницах, компактности, снижения энергозатрат ассистента в указанном режиме и себестоимости изделия.
Решение поставленной задачи достигается тем, что в транспортном средстве, преимущественно для перемещения человека по лестницам, содержащем кресло для размещения перемещаемого человека или иное устройство для размещения полезной нагрузки, раму, по крайней мере, с одной рукояткой для сопровождающе-управляющего человека, по меньшей мере, пару соосных колес, устройство перемещения по ступеням лестницы, в состав которого входят взаимосвязанные источник автономного энергопитания, привод и опорные рычаги, разнесенные вдоль оси колес, смещенные от нее в поперечных направлениях в пределах радиусов колес, выступающие за внешние окружности колес своими концами для взаимодействия со ступенями и возможностью силового поворота и/или вращения в плоскостях, параллельных плоскостям вращения колес, в направлении перемещения транспортного средства задним ходом вверх, устройство обеспечения плавности спуска со ступени и механические тормоза, электромеханический привод устройства перемещения по ступеням лестницы выполнен реверсивным, то есть с возможностью силового поворота и/или вращения опорных рычагов, дополнительно, в направлении перемещения транспортного средства передним ходом вниз, а устройство обеспечения плавности спуска со ступени конструктивно и функционально объединено с устройством перемещения по ступеням лестницы и структурно входит в состав последнего в части опорных рычагов, электромеханического привода их поворота и дополнительно включает в себя рычаги с опорными роликами на своих свободных концах, служащие гравитационными датчиками положения колес на опорной ступени относительно ее кромки, шарнирно установленные сбоку-спереди колес с возможностью принудительного перевода из нерабочего фиксированного, вне лестничных маршей, верхнего положения в рабочее, на лестничных маршах, нижнее положение с качением роликов по ступени рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью, а механические тормоза выполнены автоматическими, то есть с возможностью автоматического торможения вращения колес на расстоянии от кромки ступени, достаточном для начала эффективной работы устройства перемещения по ступеням лестницы в режиме спуска со ступени.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- каждый опорный рычаг устройства перемещения по ступеням лестницы может быть выполнен с двумя плечами, которые расположены симметрично относительно оси вращения опорных рычагов;
- рычаги с опорными роликами, служащие гравитационными датчиками (датчиками конца ступени), могут быть подпружинены с возможностью фиксации рычагов в нерабочем верхнем их положении силами упругости пружин;
- автоматические тормоза транспортного средства могут быть выполнены ленточными, при этом тормозные ленты своими концами закреплены, соответственно, на ступицах колес или иных элементах, неподвижных относительно рамы, и на рычагах гравитационных датчиков, с возможностью частичного охвата, с трением, вращающихся частей колес, преимущественно тормозных барабанов колес, предусмотренных с этой целью;
- автоматические тормоза транспортного средства могут быть выполнены в виде опорных костылей с фрикционными опорными плоскостями, предусмотренных по одному на каждом рычаге гравитационного датчика между шарнирно закрепленным основанием рычага и его опорным роликом с возможностью контакта фрикционной поверхности костыля с текущей ступенью при вывешивании опорного ролика над последующей ступенью;
- при последней совокупности дополнительных существенных признаков опорные костыли могут быть установлены на рычагах гравитационных датчиков с возможностью регулирования угла их установки относительно рычагов;
- транспортное средство может содержать как минимум одно, вынесенное в направлении переднего хода транспортного средства дополнительное колесо, преимущественно меньшего диаметра, рояльного типа или в виде ролика;
- при последней совокупности дополнительных существенных признаков дополнительные колеса могут быть установлены на концах стоек, установленных, в свою очередь, на продольных направляющих, служащих, одновременно, продольными стяжками элементов рамы, несущих колеса и дополнительные колеса, с возможностью регулирования колесной базы;
- при предпоследней совокупности дополнительных существенных признаков дополнительные колеса могут быть установлены на отдельной рамной или иной конструкции подкатного типа, с возможностью временно совместного перемещения, по крайней мере, вне лестниц;
- транспортное средство может быть дополнительно снабжено колесами большего диаметра, установленными преимущественно эксцентрично упомянутой паре основных колес, а также ручным приводом их вращения, например, в виде маховых колес, жестко связанных с колесами большего диаметра непосредственно или через цепную передачу.
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
На чертежах изображены, как примеры возможности реализации (промышленной применимости) изобретения, варианты конкретного конструктивного выполнения заявляемого транспортного средства.
На фиг.1 показан общий вид транспортного средства (с транспортируемым человеком) на ступени лестничного марша при нерабочем положении опорных рычагов (механизм перемещения по ступеням выключен), вид спереди-сбоку;
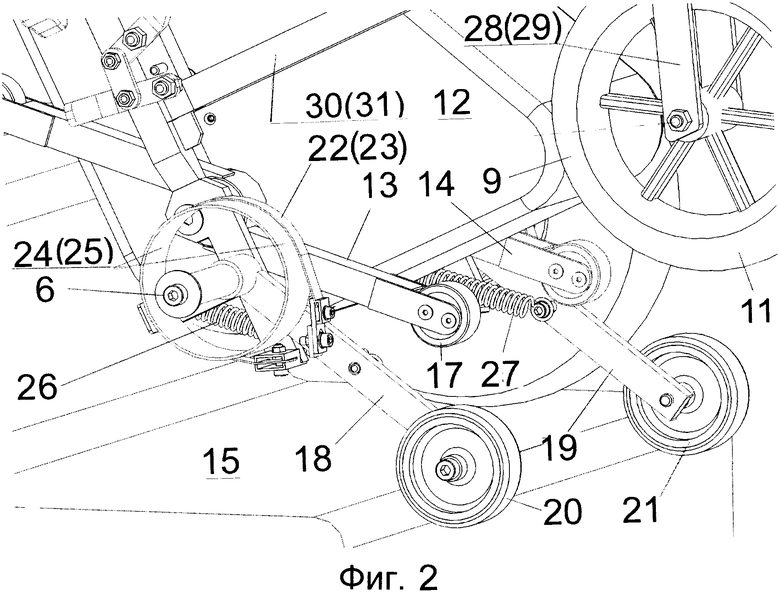
на фиг.2 - увеличенный фрагмент фиг.1;
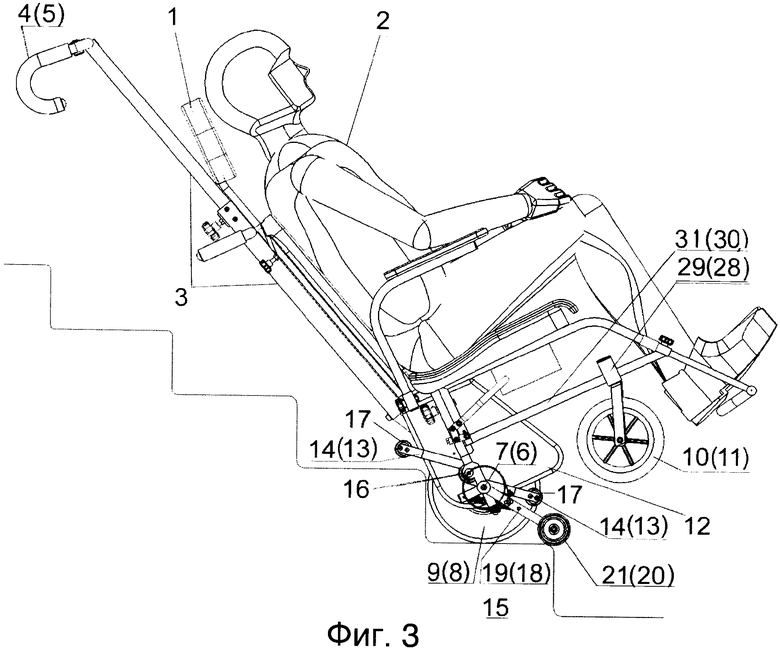
на фиг.3 - транспортное средство (с транспортируемым человеком) на ступени лестничного марша в положении готовности движения вниз (вверх) по лестнице, вид сбоку;
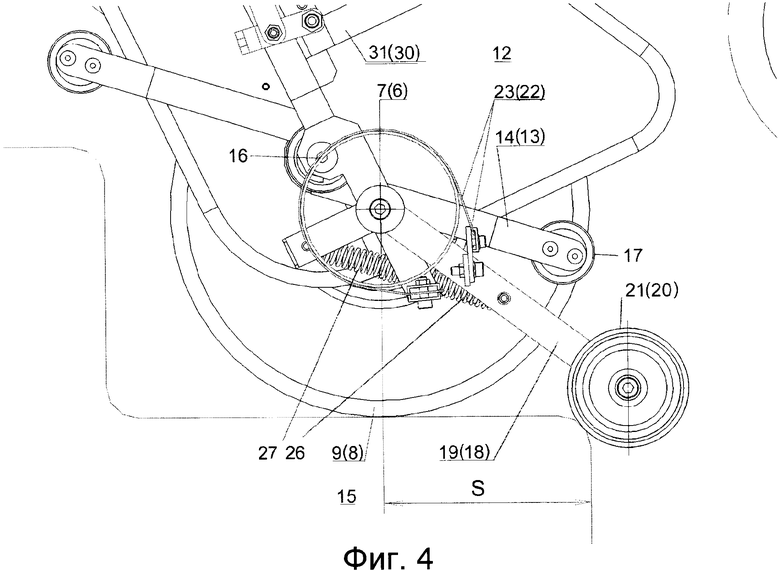
на фиг.4 - увеличенный фрагмент фиг.3, где s - гарантированное расстояние от проекции оси колеса (осей колес) на опорную поверхность ступени до кромки последней во избежание срыва колес со ступени;
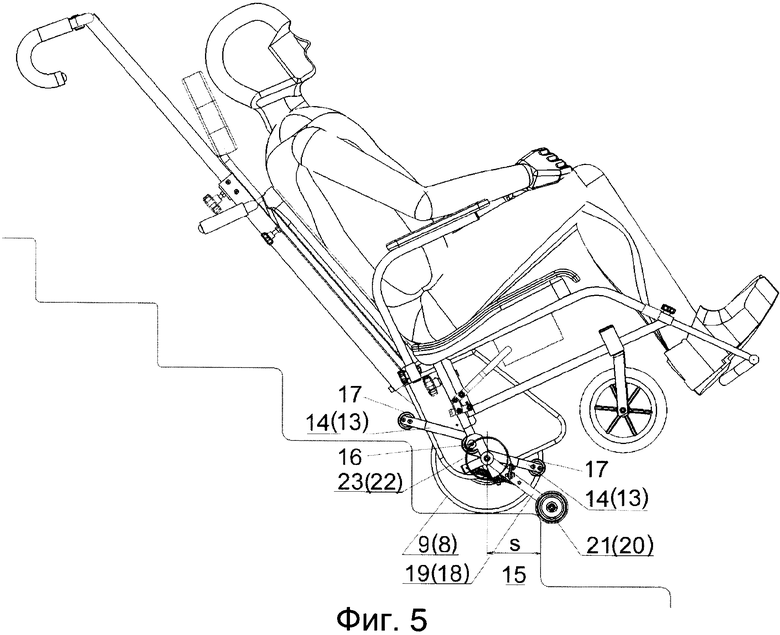
на фиг.5 - транспортное средство (с транспортируемым человеком) на ступени лестничного марша при движении вниз в момент автоматического включения механических тормозов ленточного типа на расстоянии s, вид сбоку;
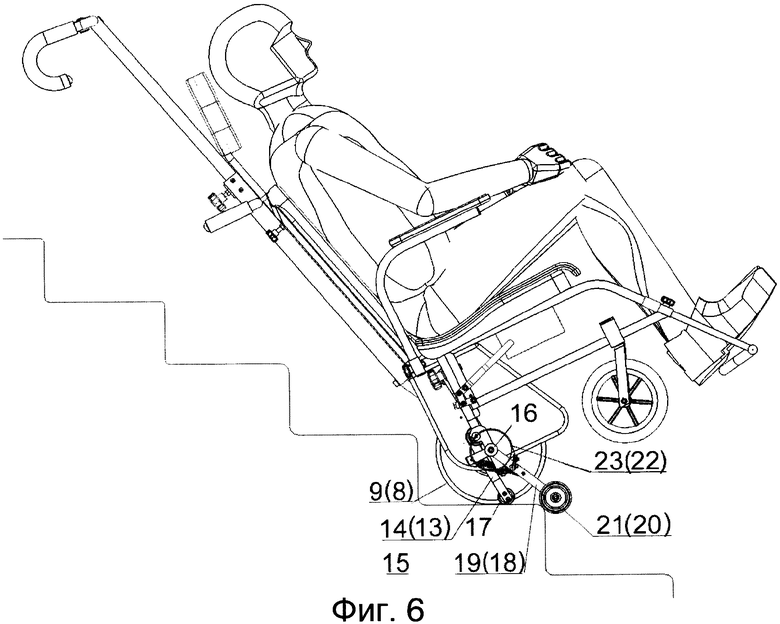
на фиг.6 - транспортное средство (с транспортируемым человеком) на ступени лестничного марша при движении вниз в момент упора концов опорных рычагов в ступень при работающем устройстве перемещения по ступеням и включенных механических тормозах транспортного средства;
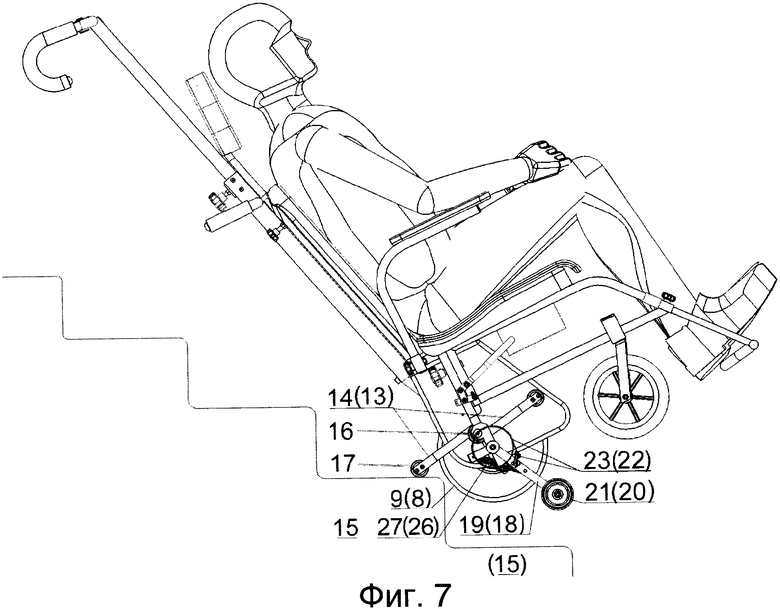
на фиг.7 - транспортное средство (с транспортируемым человеком) на ступени лестничного марша при движении вниз в момент зависания приподнятых и перенесенных (опорными рычагами колес) над очередной, расположенной ниже ступенью при работающем устройстве перемещения по ступеням и автоматически включенных механических тормозах;
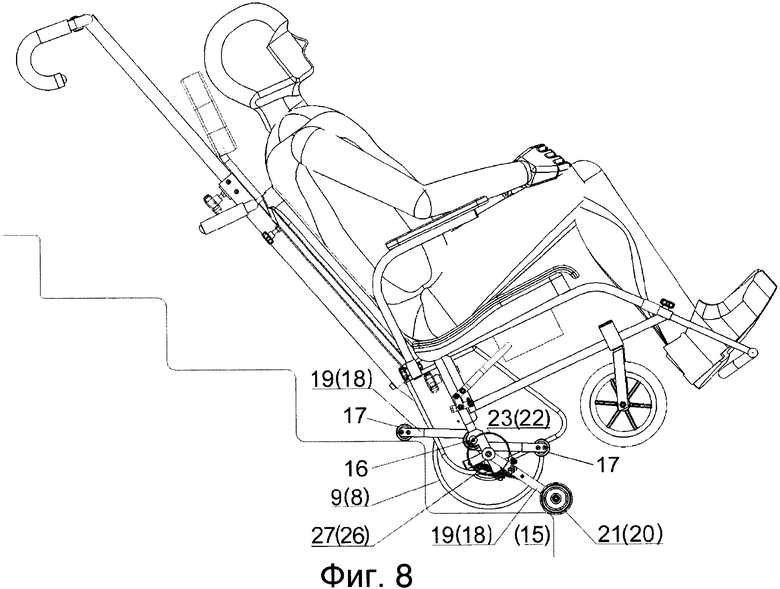
на фиг.8 - транспортное средство (с транспортируемым человеком) на ступени лестничного марша при движении вниз, в положении перенесенных (опорными рычагами) колес на очередную, расположенную ниже ступень и автоматически отключенных механических тормозах вследствие опоры роликов гравитационных датчиков.
Транспортное средство, преимущественно для перемещения человека по лестницам, содержит кресло 1 для транспортируемого человека 2 или иное устройство для размещения полезной нагрузки, раму 3, желательно переменной высоты, предпочтительно телескопической конструкции (с фиксатором в укороченном и в удлиненном положениях), с двумя (одной или несколькими) рукоятками 4, 5 на верхнем ее конце для кистей рук сопровождающе-управляющего человека (далее - ассистента, на чертежах не показан) и соосные (оси 6-7) колеса 8, 9 на нижнем ее конце (по левому и правому бортам транспортного средства), как минимум один вынесенный вперед дополнительный опорный элемент типа рояльного колеса (рекомендуемые, но не обязательные элементы, в данных примерах это два поворотных относительно вертикальных осей колеса 10, 11). Транспортное средство снабжено устройством подъема по лестнице, которое включает в себя автономный источник электропитания (не показан), электромеханический привод 12 (как правило, электродвигатель с редуктором) и связанные с ним опорные рычаги 13, 14, разнесенные вдоль оси 6-7 колес 8, 9 (т.е. по правому и левому бортам соответственно).
В принципе, привод может быть и не электромеханическим (ручным и т.д.), а источник энергии для его автономного питания, соответственно, не электрическим.
Как правило, каждый из рычагов 13, 14 выполнен двуплечим (как это показано на чертежах) и установлен со смещением относительно оси 6-7 в поперечных направлениях в пределах радиуса колес 8, 9 (иначе говоря, продольные оси плеч не пересекают оси 6-7), а концы рычага 13 (14) выступают (по меньшей мере, на части своей траектории) за внешние окружности колес 8, 9 для взаимодействия с ближайшей свободной от колес 8, 9 ступенью 15 лестницы.
Более того, рычаги 13, 14 установлены с возможностью реверсивного вращения от электромеханического привода 12 (привод 12 выполнен реверсивным) в направлении перемещения транспортного средства задним ходом вверх или передним ходом вниз (соответственно, всхода на вышестоящую ступень 15 лестницы или спуска с нее), вокруг оси 16, неподвижной относительно рамы 3. Таким образом, рычаги 13, 14 установлены с возможностью, одновременно, поступательного движения и силового поворота в плоскостях, параллельных плоскостям вращения колес 8, 9.
На концах рычагов 13, 14 рекомендуется устанавливать опорные фрикционные элементы 17 минимально возможной высоты. В частности, они могут иметь цилиндрическую форму (тогда под высотой будет пониматься радиус).
Соотношение диаметра колеса 8 (9), длины плеч опорного рычага 13 (14), высоты фрикционного элемента 17 и смещение оси 16 вращения опорного рычага 13 (14) относительно оси 6-7 могут быть выбраны аналогично прототипу, согласно проведенным авторами теоретическим и экспериментальным (на ходовом макете) исследованиям.
В составе транспортного средства имеется устройство обеспечения плавности спуска со ступени.
Последнее конструктивно и функционально объединено с устройством перемещения по ступеням 15 лестницы и структурно входит в состав последнего в части опорных рычагов 13, 14 и привода их поворота.
Кроме того, устройство обеспечения плавности спуска со ступени дополнительно включает в себя рычаги 18, 19 с опорными роликами 20, 21 на своих свободных концах, служащие гравитационными датчиками положения колес 8, 9 на опорной ступени 15 относительно ее кромки (их можно назвать также "датчиками конца ступени" или "датчиками опоры"). Рычаги 18, 19 шарнирно установлены соосно с колесами 8, 9 сбоку-спереди них с возможностью принудительного перевода из нерабочего верхнего фиксированного положения в рабочее нижнее с качением роликов по ступени 15 рядом с колесами 8, 9 и последующего срыва (поворота в угловом секторе ниже) под действием, по меньшей мере (см. ниже через один абзац), собственной силы тяжести и зависания над нижестоящей ступенью (15).
Более того, устройство обеспечения плавности спуска со ступени содержит самозатягивающиеся тормоза, предпочтительно ленточные, ленты 22, 23 которых своими концами закреплены, соответственно, на ступицах колес 8, 9 (или иных элементах, неподвижных относительно рамы 3) и на рычагах 18, 19 с возможностью частичного охвата, с трением, вращающихся частей колес 8, 9, преимущественно тормозных барабанов 24, 25 колес, предусмотренных с этой целью и концентрично установленных снаружи ступиц колес 8, 9 непосредственно под рабочими поверхностями лент 22, 23 (см. фиг.2; на фиг.4, 5-8 барабаны изображены без выделения позиций, в связи с их тонкостенностью), и торможения, таким образом, колес 8, 9 на расстоянии s (см. фиг.4, 5) от кромки ступени 15, достаточном для начала эффективной работы устройства перемещения по ступеням лестницы в режиме спуска со ступени.
Рычаги 18, 19 с роликами 20, 21, служащие гравитационными датчиками, могут быть подпружинены (пружины 26, 27) с возможностью фиксации рычагов 18, 19 в нерабочем верхнем их положении (где они не мешают движению транспортного средства вне лестничных маршей) силами упругости пружин 26, 27. При этом последние могут использоваться в дополнение к силам тяжести для движения зависших рычагов 18, 19 вниз.
По другим возможным вариантам (не приведены) автоматические тормоза транспортного средства могут быть выполнены в виде опорных костылей с фрикционными опорными плоскостями, предусмотренных по одному на каждом рычаге 18, 19 гравитационного датчика между шарнирно закрепленным основанием рычага и его опорным роликом (20, 21) с возможностью контакта фрикционной поверхности костыля с текущей ступенью 15 при вывешивании опорного ролика (20, 21) над последующей ступенью.
Упомянутые выше опорные костыли могут быть установлены на рычагах 18, 19 гравитационных датчиков с возможностью регулирования угла их установки относительно рычагов 18, 19, для адаптации к лестницам с различного типоразмера ступеней 15.
Дополнительные колеса 10, 11 могут быть установлены на концах стоек 28, 29, установленных, в свою очередь, на продольных направляющих 30, 31, служащих, одновременно, продольными стяжками элементов рамы 3, несущих колеса 8, 9 и дополнительные колеса 10, 11, с возможностью регулирования колесной базы.
По другому возможному варианту (не проиллюстрировано) дополнительные колеса 10, 11 установлены на отдельной рамной или иной конструкции подкатного типа, с возможностью временно совместного перемещения, по крайней мере, вне лестниц (реализация модульного принципа).
Транспортное средство может быть (аналогично упомянутому в описании устройства-прототипа конструктивному варианту) дополнительно снабжено колесами большего диаметра, установленными предпочтительно эксцентрично (несоосно) паре основных колес 8, 9 (или временно вместо них), а также ручным приводом их вращения, например в виде маховых колес, жестко связанных с колесами 8, 9 непосредственно или через цепную передачу (также не проиллюстрировано).
В состав транспортного средства могут входить также средства изменения взаимного расположения его элементов (включая ряд упомянутых выше), средства управления транспортным средством и контроля его параметров. В частности, пульт управления должен иметь индикацию режима работы и состояния аккумуляторной батареи. В составе транспортного средства как разновидности TCP должны входить также ремень безопасности для транспортируемого человека 2.
Возможно наличие, дополнительно, "стояночного" механического тормоза (механических тормозов).
Описанные примеры конкретных вариантов конструкции не исключают других возможных вариантов устройства в рамках заявляемой совокупности существенных конструктивных признаков (см. формулу изобретения).
Заявляемое устройство работает следующим образом.
В режиме движения по ровной поверхности (т.е. при отсутствии профильных препятствий типа лестниц и поребриков) транспортное средство с транспортируемым человеком 2 перемещает ассистент, как правило, передним ходом (лицом перемещаемого человека вперед), с опорой на два колеса 8, 9 или на все колеса 8-11. При этом предварительно устанавливают удобную высоту расположения рукояток 4, 5 путем расфиксации и раздвижения телескопической части рамы 3 с фиксацией в новом положении, а также необходимую (рациональную) колесную базу путем расфиксации, смещения стоек 28, 29 по направляющим 30, 31 соответственно и фиксации в новом положении.
В варианте с приводными колесами движение может осуществляться транспортируемым человеком самостоятельно (без ассистента) путем использования, например, маховых колес.
Это обычные режимы движения инвалидных кресел-каталок и грузовых тележек.
В режиме спуска с поребрика или движения вниз по лестнице ассистент, предварительно установив рычаги 18, 19 (с использованием фиксирующих пружин 26, 27) из крайнего верхнего, фиксированного, "нерабочего" положения в рабочее положение (в котором ролики 20, 21 под действием веса датчиков 18-23, 26, 27 и сил упругости пружин 26, 27 поджаты в опорную поверхность, т.е. в ступень 15 - см. фиг.3), толкает (и, одновременно, подстраховочно придерживает, помогает держать динамическое равновесие) перед собой транспортное средство передним ходом в положении его опоры на колеса 8, 9. При этом устройство перемещения по ступеням лестницы с рычагами 13, 14 не работает (рычаги 13, 14, как правило, не поворачиваются, во всяком случае, не входят в контакт со ступенями).
При сходе роликов 20, 21 со ступени (на расстоянии s проекции оси 6 (7) колес до кромки ступени 15 - см. фиг.4, 5) рычаги 18, 19 под действием сил веса устройств 18-21 и упругости пружин 26, 27, в условиях "ухода опоры вниз", поворачиваются по часовой стрелке (опускаются вниз). При этом они, в варианте с ленточными тормозами, автоматически поджимают фрикционные ленты 22, 23 к тормозным барабанам (или иным вращающимся элементам) 24, 25 соответственно. Расположение точек крепления лент 22, 23 перед ступицами при вращении тормозных барабанов 24, 25 по часовой стрелке обусловливает самозатягивание тормозов. Включение таким образом тормозов предотвращает срыв колес 8, 9 и транспортного средства со ступени 15 и является сигналом ассистенту (или устройству управления в случае автоматизации движения транспортного средства) о необходимости либо остановки (прекратить толкать раму 3), либо включения устройства перемещения по ступеням лестницы.
В последнем случае электромеханический привод поворачивает (силовой поворот) рычаги 13, 14 по часовой стрелке. Фрикционные элементы 17 "набегающих" плеч рычагов 13, 14, вступая во взаимодействие со ступенью 15 (см. фиг.6),
приподнимают транспортное средство с колесами над ступенью 15 и, одновременно, переносят его вперед (см. фиг.7), а затем - вперед-вниз до опоры на поверхность нижерасположенной очередной ступени (15) - см. фиг.8.
При этом рычаги 18, 19 под действием веса всего транспортного средства возвращаются в начальное рабочее положение, автоматически отключая ленточные тормоза.
В варианте устройства с опорными костылями торможение транспортного средства происходит за счет фрикционного взаимодействия опорных плоскостей костылей с поверхностью текущей ступени 5.
Таким образом, обеспечивается плавный («осторожный») спуск со ступени 15.
Дальнейший спуск осуществляется аналогичным образом.
В процессе движения вниз по лестнице ассистент может оперативно изменять величину угла наклона рамы 3 в продольной вертикальной плоскости, поддерживая тем самым общий баланс (развесовку). Как показали испытания экспериментального образца, при спуске транспортного средства с человеком 2 нагрузка на руки ассистента несущественна.
Подъем на поребрик, на ступень или движение вверх по лестнице - ассистент первым поднимается вверх и толкает транспортное средство за собой задним ходом до подхода колес 8, 9 к кромке ступени 15, предварительно установив рычаги 13, 14 (путем кратковременного включения привода 12) в рабочее положение, предпочтительно с положительным углом атаки рычагов 13, 14 и расположением элементов 17 над уровнем первой ступени - см. фиг.8 (разумеется, если это не было сделано ранее им или автоматически средствами контроля и управления), удобную высоту расположения рукояток 4, 5 (описанным выше путем изменения длины рамы 3) и включив питания привода. Затем ассистент нажимает и продолжает удерживать во включенном состоянии кнопку «работа механизма подъема» (тумблер и кнопка входит в состав системы управления - не показана). При этом привод 12 поворачивает рычаги 13, 14 против часовой стрелки. Они набегают элементами 17 на горизонтальную поверхность очередной вышестоящей ступени, принимают на себя основную часть веса транспортного средства с человеком 2. Транспортное средство, с опорой на элементы 17 при вывешенных колесах 8, 9, перемещается вверх-вперед. Процесс продолжается до преодоления всего лестничного марша. При этом роль ассистента, как и в режиме спуска, сводится к контролю (и корректировке, при необходимости) кинематики движения и поддержанию общего баланса (развесовки) корректировкой угла наклона рамы 3.
Процесс подъема по лестнице, таким образом, принципиально не отличается от подъема устройства-прототипа.
Устройство перемещения по ступеням лестницы обеспечивает максимальную скорость подъема по лестнице примерно 1 ступень в 3 секунды (по результатам испытаний ходовых макетов транспортного средства).
Использование изобретения позволяет улучшить технико-эксплуатационные и экономические (потребительские) характеристики транспортного средства, преимущественно для перемещения человека по лестницам (мобильного лестничного подъемника), за счет повышения плавности и устойчивости движения на лестницах, компактности, снижения энергозатрат ассистента в указанном режиме и себестоимости изделия.
Источники информации
1. GB 2290757, A61G 7/10, В62В 1/22, A61G 5/00, 7/10, 10.01.1996.
2. SU 1607806 А1, A61G 5/06, 23.11.1990.
3. Elektnsche Treppensteiger. Hersteller / Manufacturer SANO Trasportgeraete GmbH. - Am Hoizpoldigut 22 4040 Linz/Lichtenberg. AUSTRIA. (Каталог австрийской фирмы SANO. - 15 с. - Продукт сети Интернет: http://www.sano-stair-climber.com; www.sano-treppensteighilfe.com).
4. S-max - der Treppensteiger fur Ihren Rollstuhl. AAT Alber Antriebstechnik GmbH / Postfach 10 0560 D-72426 Albstadt. (Каталог S-IVIAX германской фирмы AAT. - 8 с. - Продукт сети Интернет: http://www.aat-online.de).
5. S-max - der universalle Treppensteiger. AAT Alber Antriebstechnik GmbH / Postfach 10 0560 D-72426 Albstadt. (Каталог S-MAX германской фирмы AAT. - 8 с. - Продукт сети Интернет: http://www.aat-online.de).
6. RU 2304952 С1, A61G 5/06, В62В 11/00, 27.08.2007 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ И НА ЭСКАЛАТОРАХ | 2012 |
|
RU2510347C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2005 |
|
RU2304952C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО, ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2011 |
|
RU2459605C1 |
| ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ДВИЖЕНИЯ, В ЧАСТНОСТИ, ПО ЛЕСТНИЦАМ | 2005 |
|
RU2312788C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ ПОДЪЕМА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2570504C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2297206C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
Изобретение относится к наземным транспортным средствам для перемещения человека или груза по лестницам или по ровной поверхности. Транспортное средство, преимущественно для перемещения человека по лестницам, содержит кресло для размещения перемещаемого человека или иное устройство для размещения полезной нагрузки, раму, по крайней мере, с одной рукояткой для сопровождающе-управляющего человека, по меньшей мере, пару соосных колес, устройство обеспечения плавности спуска со ступени, механические тормоза и устройство перемещения по ступеням лестницы. Устройство перемещения по ступеням лестницы включает взаимосвязанные источник автономного энергопитания, привод и опорные рычаги, которые разнесены вдоль оси колес, смещены от нее в поперечных направлениях в пределах радиусов колес и выступают за внешние окружности колес своими концами для взаимодействия со ступенями. Опорные рычаги имеют возможность силового поворота и/или вращения в плоскостях, параллельных плоскостям вращения колес, в направлении перемещения транспортного средства задним ходом вверх. Привод устройства перемещения по ступеням лестницы выполнен реверсивным и имеет возможность силового поворота и/или вращения опорных рычагов, дополнительно, в направлении перемещения транспортного средства передним ходом вниз. Устройство обеспечения плавности спуска со ступени конструктивно и функционально объединено с устройством перемещения по ступеням лестницы и структурно входит в состав последнего в части опорных рычагов, привода их поворота и дополнительно включает в себя рычаги с опорными роликами на своих свободных концах. Рычаги служат гравитационными датчиками положения колес на опорной ступени относительно ее кромки, шарнирно установлены сбоку-спереди колес с возможностью принудительного перевода из нерабочего фиксированного, вне лестничных маршей, верхнего положения в рабочее, на лестничных маршах, нижнее положение с качением роликов по ступени рядом с колесамии последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью. Механические тормоза выполнены автоматическими, то есть с возможностью автоматического торможения вращения колес на расстоянии от кромки ступени, достаточном для начала эффективной работы устройства перемещения по ступеням лестницы в режиме спуска со ступени. Использование изобретения позволяет улучшить технико-эксплуатационные и экономические (потребительские) характеристики транспортного средства, преимущественно для перемещения человека по лестницам (мобильного лестничного подъемника), за счет повышения плавности и устойчивости движения на лестницах, компактности, снижения энергозатрат ассистента в указанном режиме и себестоимости изделия. 9 з.п. ф-лы, 8 ил.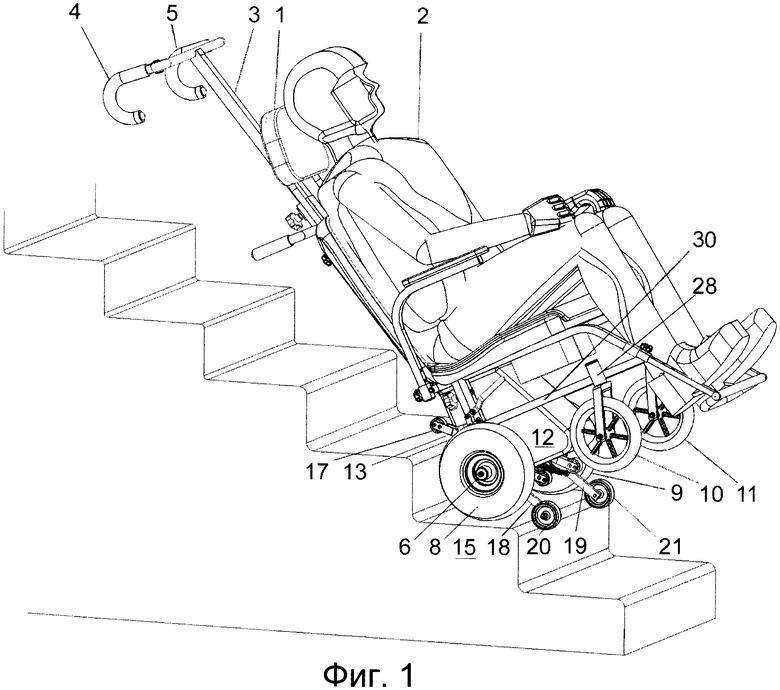
1. Транспортное средство, преимущественно для перемещения человека по лестницам, содержащее кресло для размещения перемещаемого человека или устройство для размещения полезной нагрузки, раму, по крайней мере, с одной рукояткой для сопровождающего-управляющего человека, по меньшей мере, пару соосных колес, устройство перемещения по ступеням лестницы, в состав которого входят взаимосвязанные источник автономного энергопитания, привод и опорные рычаги, разнесенные вдоль оси колес, смещенные от нее в поперечных направлениях в пределах радиусов колес, выступающие за внешние окружности колес своими концами для взаимодействия со ступенями и возможностью силового поворота и/или вращения в плоскостях, параллельных плоскостям вращения колес, в направлении перемещения транспортного средства задним ходом вверх, устройство обеспечения плавности спуска со ступени и механические тормоза, отличающееся тем, что привод устройства перемещения по ступеням лестницы выполнен с возможностью силового поворота и/или вращения опорных рычагов, дополнительно в направлении перемещения транспортного средства передним ходом вниз, а устройство обеспечения плавности спуска со ступени конструктивно и функционально объединено с устройством перемещения по ступеням лестницы и структурно входит в состав последнего в части опорных рычагов, электромеханического привода их поворота и дополнительно включает в себя рычаги с опорными роликами на своих свободных концах, служащие гравитационными датчиками положения колес на опорной ступени относительно ее кромки, шарнирно установленные сбоку-спереди колес с возможностью принудительного перевода из нерабочего, вне лестничных маршей, верхнего положения в рабочее, на лестничных маршах, нижнее положение с качением роликов по ступени рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью, а механические тормоза выполнены с возможностью автоматического торможения колес на расстоянии от кромки ступени, достаточном для начала работы устройства перемещения по ступеням лестницы в режиме спуска со ступени.
2. Транспортное средство по п.1, отличающееся тем, что каждый опорный рычаг устройства перемещения по ступеням лестницы выполнен с двумя плечами, которые расположены симметрично относительно оси вращения опорных рычагов.
3. Транспортное средство по п.1, отличающееся тем, что рычаги с опорными роликами, служащие гравитационными датчиками, подпружинены с возможностью фиксации рычагов в нерабочем верхнем их положении силами упругости пружин.
4. Транспортное средство по п.1, отличающееся тем, что механические тормоза транспортного средства выполнены ленточными, при этом тормозные ленты своими концами закреплены, соответственно, на ступицах колес или иных элементах, неподвижных относительно рамы, и на рычагах гравитационных датчиков, с возможностью частичного охвата, с трением, вращающихся частей колес, преимущественно тормозных барабанов колес, предусмотренных с этой целью.
5. Транспортное средство по п.1, отличающееся тем, что механические тормоза транспортного средства выполнены в виде опорных костылей с фрикционными опорными плоскостями, предусмотренных, по одному на каждом рычаге гравитационного датчика между шарнирно закрепленным основанием рычага и его опорным роликом с возможностью контакта фрикционной поверхности костыля с текущей ступенью при вывешивании опорного ролика над последующей ступенью.
6. Транспортное средство по п.5, отличающееся тем, что опорные костыли установлены на рычагах гравитационных датчиков с возможностью регулирования угла их установки относительно рычагов.
7. Транспортное средство по п.1, отличающееся тем, что содержит как минимум одно, вынесенное в направлении переднего хода транспортного средства, дополнительное колесо, преимущественно меньшего диаметра, рояльного типа или в виде ролика.
8. Транспортное средство по п.7, отличающееся тем, что дополнительные колеса установлены на концах стоек, установленных, в свою очередь, на продольных направляющих, служащих одновременно продольными стяжками элементов рамы, несущих колеса и дополнительные колеса, с возможностью регулирования колесной базы.
9. Транспортное средство по п.7, отличающееся тем, что дополнительные колеса установлены на отдельной рамной или иной конструкции подкатного типа, с возможностью временно совместного перемещения, по крайней мере, вне лестниц.
10. Транспортное средство по п.1, отличающееся тем, что дополнительно снабжено колесами большего диаметра, установленными, преимущественно, эксцентрично упомянутой паре основных колес, а также ручным приводом их вращения, например в виде маховых колес, жестко связанных с колесами большего диаметра непосредственно или через цепную передачу.
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2005 |
|
RU2304952C1 |
| СКЛАДНОЕ ИНВАЛИДНОЕ КРЕСЛО-КОЛЯСКА С РЫЧАЖНЫМ ПРИВОДОМ ПОДАЧИ ПО ЛЕСТНИЦЕ | 2004 |
|
RU2267311C1 |
| ИНВАЛИДНАЯ КОЛЯСКА ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЛЕСТНИЦАМ | 1996 |
|
RU2102957C1 |
| Сепаратор для обестканивания измельченных резино-тканевых материалов | 1961 |
|
SU146029A1 |
| ROLLSTUHLKATALOG MEYRA, 1994, p.149. | |||

