Изобретение относится к механизмам преобразования возвратно-поступательного движения во вращательное.
Указанные механизмы находят применение во многих областях машиностроения. Их используют в приборах, преобразующих движение, двигателях внутреннего сгорания, поршневых компрессорах и насосах, поршневых питателях и в другом технологическом оборудовании.
Основным преобразующим механизмом, отличающимся высокой простотой, технологичностью и надежностью, является кривошипно-шатунный механизм. Однако он имеет такие недостатки, как неуравновешенность поступательно движущихся и вращающихся масс, что приводит к увеличению массы механизма, наличие "мертвых точек", значительное пространство, необходимое для движения, а также невозможность воспроизведения требуемого закона движения ползуна (поршня).
Существуют преобразующие механизмы, отличные от кривошипно-шатунных механизмов и имеющие лучшие массогабаритные показатели: механизмы с плоской и пространственной вращающимися шайбами, механизм с качающейся, равномерно прецессирующей шайбой, механизм "Жиродин", кривошипно-карданный преобразующий механизм (Чистяков В. К. Динамика поршневых и комбинированных двигателей внутреннего сгорания. - М.: Машиностроение, 1989. - 256 с.). Все эти механизмы объединены названием "аксиально-поршневой механизм" (АПМ).
Среди аналогов заявляемого изобретения в приборостроении известен ряд механизмов, преобразующих возвратно-поступательное движение во вращательное или вращательное движение в возвратно-поступательное, например "Трехзвенный пространственный механизм с цилиндрическим кулачком" (Артоболевский И. И. Механизмы в современной технике: Справочное пособие в 7 томах. T.V: Кулачковые и фрикционные механизмы. Механизмы с гибкими звеньями. - М.: Наука, 1981. - С. 49, механизм N 2867) и "Трехзвенный пространственный механизм с восьмеркообразным профилем паза" (Там же, с.50, механизм N 2870).
В трехзвенных пространственных механизмах с цилиндрическим кулачком (механизм N 2867) и восьмеркообразным профилем паза (механизм N 2870) имеется цилиндрический кулачок с пазом, вращающийся вокруг неподвижной оси, толкатель с роликом конической или чечевицеобразной формы, который, перемещаясь по пазу кулачка, задает возвратно-поступательное движение толкателя. Однако кулачок и толкатель являются несоосными, из-за чего приложение нагрузок как на толкатель, так и на кулачок несимметрично относительно их осей, что по сравнению с предлагаемым изобретением вызывает необходимость усиления опор толкателя и кулачка и приводит к увеличению общей массы механизма. Кроме этого, возрастают потери на трение, перекосы и изгибы оси толкателя и кулачка между опорами, снижающие коэффициент полезного действия механизма аналогов.
Аналогами предлагаемого механизма преобразования возвратно-поступательного движения во вращательное или вращательного движения в возвратно-поступательное являются также механизмы, применяемые в устройствах: "Способ и устройство для уравновешивания ДВС, соединенного с ведущим валом", патент США 4834033 (РЖ "Двигатели внутреннего сгорания", 1990, N 10, с.5); "ДВС с оппозитными едиными кольцевыми поршнями и центральным валом", патент США 4887558 (РЖ "Двигатели внутреннего сгорания", 1991, N 9, с.3).
В устройстве для уравновешивания ДВС (патент США 4834033) имеется установленный параллельно оси устройства "кулачковый барабан, имеющий кулачковую канавку, окружающую кулачковый барабан по заданной траектории". Имеется установленный на штоке роликовый механизм, который при совершении возвратно-поступательного движения перемещается по канавке и вызывает вращение кулачкового барабана (кулачка). Однако в этом устройстве приложение нагрузок на роликовый механизм несимметрично относительно оси штока, что вызывает необходимость применения дополнительных опор для штока с целью снятия боковых нагрузок на цилиндры ДВС со стороны поршней, что приводит к увеличению общей массы механизма. Кроме этого, возрастают потери на трение, перекосы и изгибы оси штока между опорами, снижающие коэффициент полезного действия механизма аналога. То же самое можно сказать и о кулачковом барабане, даже при условии установки вместе с ним не одной пары цилиндров, а большего их числа, так как рабочие процессы в соседних парах цилиндров будут происходить со сдвигом фаз и усилия от давления и сил инерции будут передаваться в различных точках барабана с неодинаковым смещением вдоль оси.
Среди других аналогов заявляемого решения можно указать механизм преобразования движения, использованный в двигателе внутреннего сгорания с оппозитными едиными кольцевыми поршнями и центральным валом (патент США N 4887558). Механизм содержит поршневой узел, совершающий возвратно-поступательное движение, и центральный вал, утолщенная центральная часть которого играет роль кулачка и имеет две замкнутые синусоидальные канавки. Поршневой блок и вал расположены соосно, как и в заявляемом изобретении. Однако есть ряд существенных отличий. Во-первых, в аналоге взаимодействие поршня и вала происходит через радиальные пальцы, а не ролики. Во-вторых, форма канавок в аналоге такова, что на полный оборот вала приходится четыре хода поршня, а не два, как в заявляемом изобретении. Это связано с отсутствием у аналога пересечения канавок между собой и приводит к необходимости увеличения средней скорости поршня в два раза для достижения требуемой частоты вращения вала или применения редуктора. В первом случае это приводит к росту механических потерь, а во втором - к росту массы всего устройства.
Наиболее близким к заявляемому решению является кулачковый пространственный механизм для преобразования возвратно-поступательного движения во вращательное или вращательного в возвратно-поступательное по патенту США N 3792616 от 19.02.1974, включающий имеющий возможность возвратно-поступательного или вращательного движения относительно неподвижного корпуса, например, цилиндрический кулачок или толкатель, на боковой поверхности которого выполнены криволинейные пазы заданной конфигурации, в которые перпендикулярно оси кулачка помещены, например, конические ролики, соответствующие форме пазов и принадлежащие расположенной соосно с кулачком муфте (толкателю или валу), имеющий возможность вращательного или возвратно-поступательного движения относительно корпуса при перемещении роликов по пазам кулачок (толкатель). Основное отличие заявляемого решения от прототипа заключается в том, что криволинейные пазы на боковой поверхности кулачка или толкателя расположены не эквидистантно, а пересекают друг друга. С учетом того, что пазы могут иметь различную глубину и/или ширину, в предлагаемом решении может быть достигнута практически полная симметричность распределения нагрузок внутри механизма и необходимая непрерывность их приложения.
Аналоги и прототип, а также технический результат, получаемый при осуществлении всех вариантов предлагаемого изобретения, являются общими.
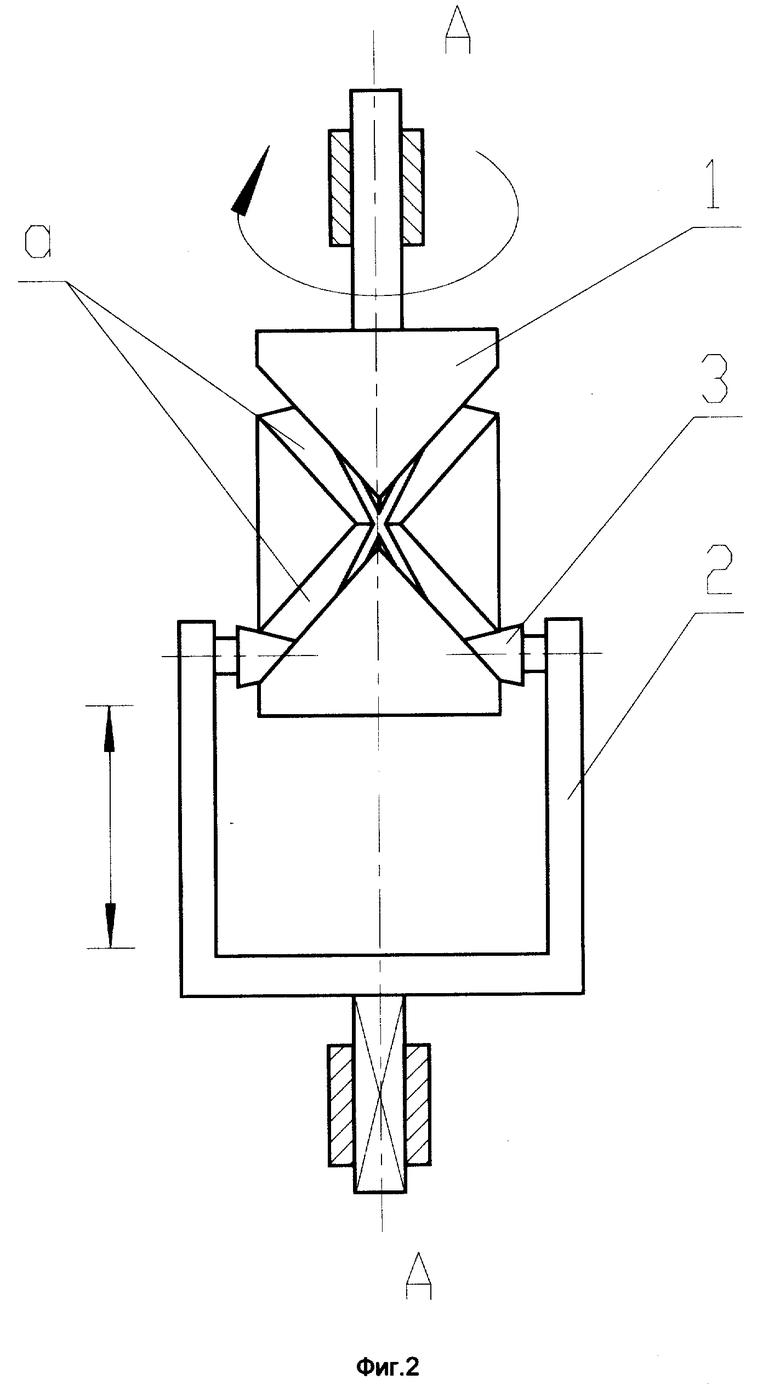
Механизм (фиг.1) состоит, например, из цилиндрического кулачка с толкателем 2, сечение которого, например, имеет квадратную форму с целью предотвращения проворачивания кулачка относительно его опор, расположенных вдоль оси "А-А". На боковой поверхности кулачка 1 выполнены криволинейные пазы "а" заданной конфигурации. В пазы перпендикулярно оси механизма помещены, например, конические ролики 3 (соответствующие форме сечения пазов кулачка) муфты 4, имеющей возможность вращения вокруг оси механизма "А-А".
С целью увеличения передаваемых нагрузок при одновременном снижении механических потерь и улучшении удельных массогабаритных показателей за счет равномерного распределения нагрузки на детали механизма количество пазов на кулачке (соответственно, количество роликов) выполнено два или более. При этом глубина и/или ширина каждого паза различны, что позволяет каждому ролику двигаться по своему пазу, даже при их пересечении, с большей плавностью хода и уменьшением стуков.
Механизм работает следующим образом. При движении кулачка 1 от одной мертвой точки к другой происходит взаимодействие криволинейных пазов "а" и конических роликов 3. Давление со стороны поверхностей пазов передается на ролики, что приводит к возникновению вращающего (крутящего) момента на муфте 4. Таким образом осуществляется преобразование возвратно-поступательного движения во вращательное. Работа механизма при преобразовании вращательного движения в возвратно-поступательное происходит в обратном порядке.
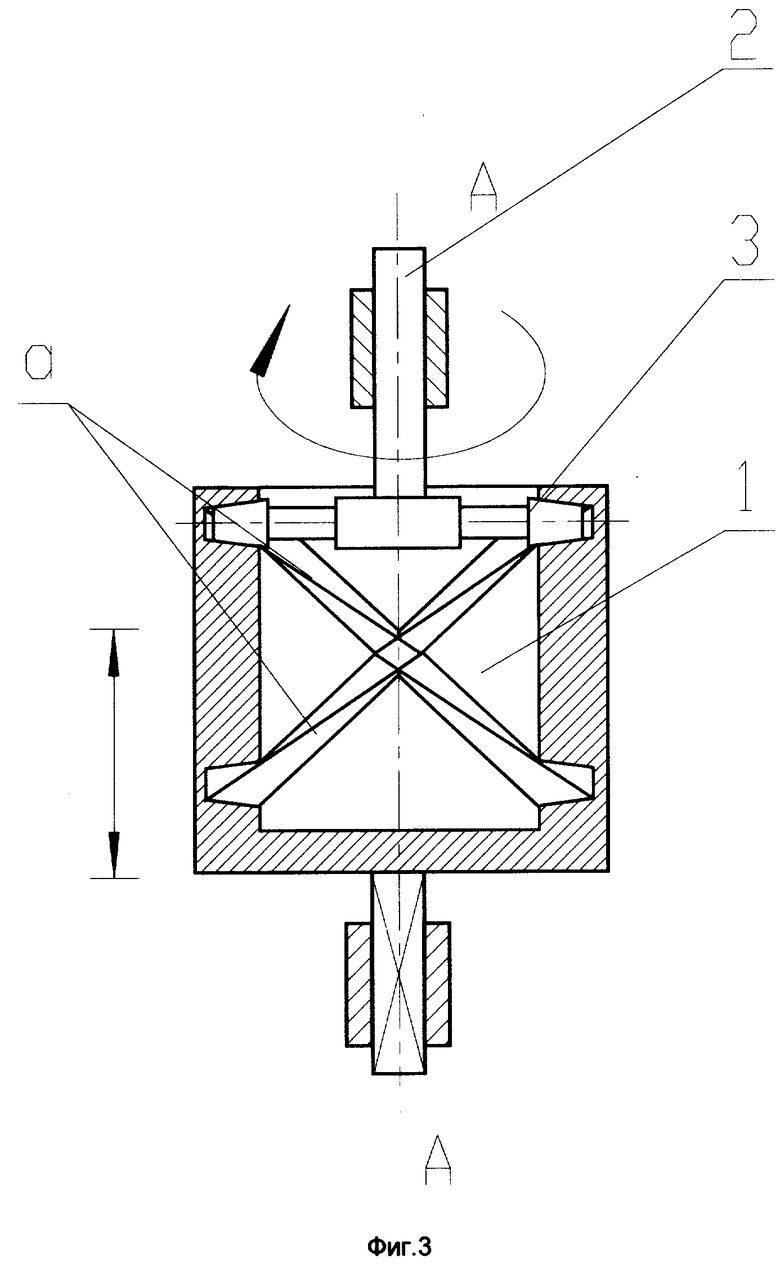
Механизм (фиг. 2) состоит например, из цилиндрического кулачка 1, имеющего возможность вращения вокруг оси "А-А". На боковой поверхности кулачка выполнены криволинейные пазы "а" заданной конфигурации. В пазы перпендикулярно оси механизма помещены, например, конические ролики 3 (соответствующие форме сечения пазов кулачка) толкателя 2 (сечение которого, например, имеет квадратную форму с целью предотвращения проворачивания толкателя относительно его опор), имеющего возможность возвратно-поступательного движения вдоль оси "А-А".
Механизм работает следующим образом. При движении толкателя 2 от одной мертвой точки к другой происходит взаимодействие конических роликов 3 и криволинейных пазов "а". Давление со стороны роликов передается на поверхности пазов, что приводит к возникновению вращающего (крутящего) момента на валу кулачка 1. Таким образом осуществляется преобразование возвратно-поступательного движения во вращательное. Работа механизма при преобразовании вращательного движения в возвратно-поступательное происходит в обратном порядке.
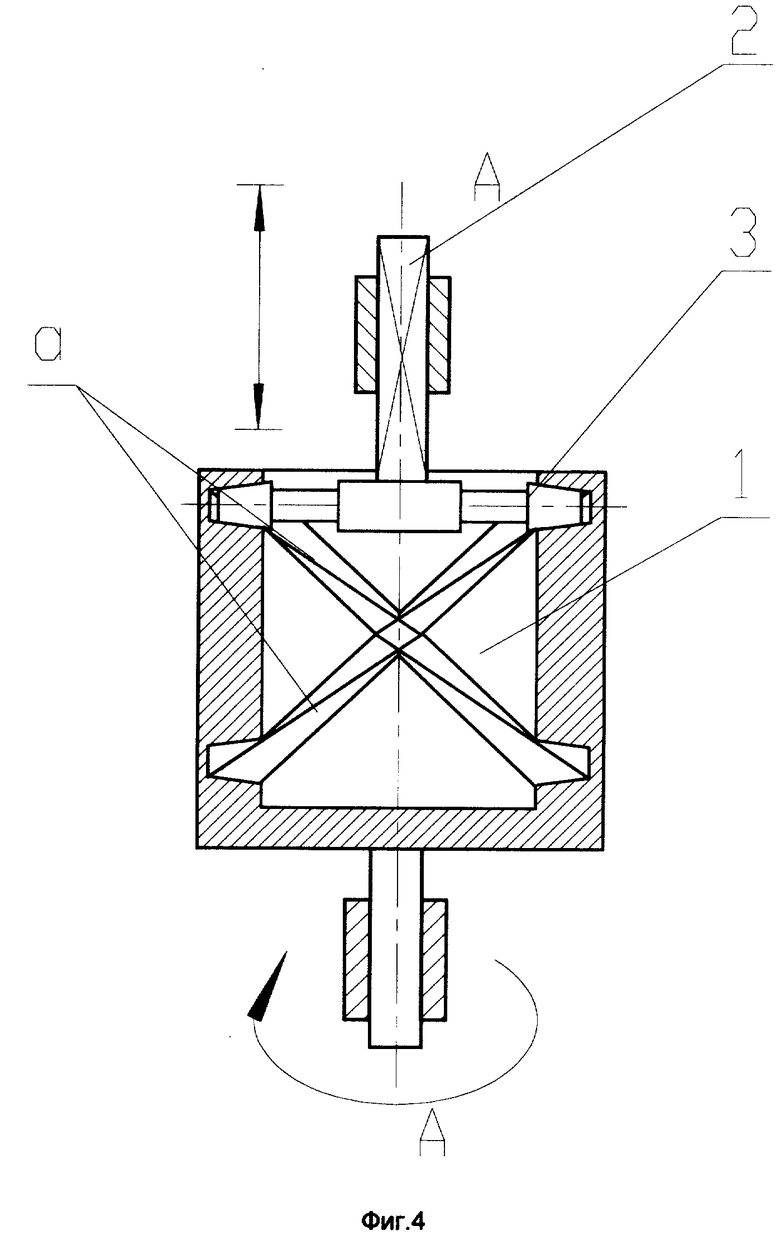
Механизм (фиг. 3) состоит, например, из цилиндрического толкателя 1, имеющего возможность возвратно-поступательного движения вдоль оси "А-А". На внутренней поверхности толкателя выполнены криволинейные пазы "а" заданной конфигурации. В пазы перпендикулярно оси механизма помещены, например, конические ролики 3 (соответствующие форме сечения пазов толкателя) вала 2, имеющего возможность вращения вокруг оси "А-А".
Механизм работает следующим образом. При движении толкателя 1 от одной мертвой точки к другой происходит взаимодействие конических роликов 3 и криволинейных пазов "а". Давление со стороны пазов передается на поверхности роликов, что приводит к возникновению вращающего (крутящего) момента на валу 2. Таким образом осуществляется преобразование возвратно-поступательного движения во вращательное. Работа механизма при преобразовании вращательного движения в возвратно-поступательное происходит в обратном порядке.
Механизм (фиг.4) состоит из, например, цилиндрического кулачка 1, имеющего возможность вращения вокруг оси "А-А". На внутренней поверхности кулачка выполнены криволинейные пазы "а" заданной конфигурации. В пазы перпендикулярно оси механизма помещены, например, конические ролики 3 (соответствующие форме сечения пазов кулачка) толкателя 2 (сечение которого, например, имеет квадратную форму с целью предотвращения проворачивания толкателя относительно его опор), имеющего возможность возвратно-поступательного движения вдоль оси "А-А".
Механизм работает следующим образом. При движении толкателя 2 от одной мертвой точки к другой происходит взаимодействие конических роликов 3 и криволинейных пазов "а". Давление со стороны роликов передается на поверхности пазов, что приводит к возникновению вращающего (крутящего) момента на валу кулачка 1. Таким образом осуществляется преобразование возвратно-поступательного движения во вращательное. Работа механизма при преобразовании вращательного движения в возвратно-поступательное происходит в обратном порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2010 |
|
RU2433320C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2010 |
|
RU2437014C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| СПОСОБ БЕССТУПЕНЧАТОЙ ТРАНСФОРМАЦИИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ, ПРИ ЖЕСТКОЙ КИНЕМАТИЧЕСКОЙ СВЯЗИ ЭЛЕМЕНТОВ ПЕРЕДАЧИ, С НИЖНИМ ПРЕДЕЛОМ УГЛОВОЙ СКОРОСТИ ВЕДОМОГО ВАЛА, РАВНЫМ НУЛЮ | 2000 |
|
RU2242653C2 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1985 |
|
SU1293427A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1982 |
|
SU1055932A1 |
| Механизм для преобразования возвратно-поступательного движения во вращательное | 1982 |
|
SU1113611A1 |
| Механизм преобразования вращательного движения в возвратно-поступательное - кулачковый механизм Ващука | 1983 |
|
SU1110971A1 |
| Устройство для преобразования возвратно-поступательного движения во вращательное | 1981 |
|
SU976158A1 |
| Механизм для преобразования вращательного движения в возвратно-поступательное | 1984 |
|
SU1165840A1 |
Изобретение относится к механизмам преобразования возвратно-поступательного движения во вращательное. Кулачковый пространственный механизм для преобразования возвратно-поступательного движения во вращательное или вращательного в возвратно-поступательное и его варианты может быть использован в машиностроении, в частности в двигателях, компрессорах и различном технологическом оборудовании. На боковой поверхности имеющего возможность вращательного или возвратно-поступательного движения кулачка выполнены криволинейные пазы, в которые перпендикулярно оси кулачка помещены конические ролики, соответствующие форме пазов и принадлежащие расположенной соосно с кулачком муфте или толкателю, имеющим возможность возвратно-поступательного или вращательного движения при перемещении роликов по пазам кулачка. Пазы на боковой поверхности кулачка выполнены разновеликими по глубине и/или ширине и смещены относительно друг друга на величину 2/n, где n - число пазов. В других вариантах пазы выполнены на имеющем возможность возвратно-поступательного движения цилиндрическом толкателе, а ролики принадлежат расположенному соосно с толкателем вращающемуся валу. При использовании изобретения повышается долговечность за счет равномерного распределения нагрузок. 4 н.п. ф-лы, 4 ил.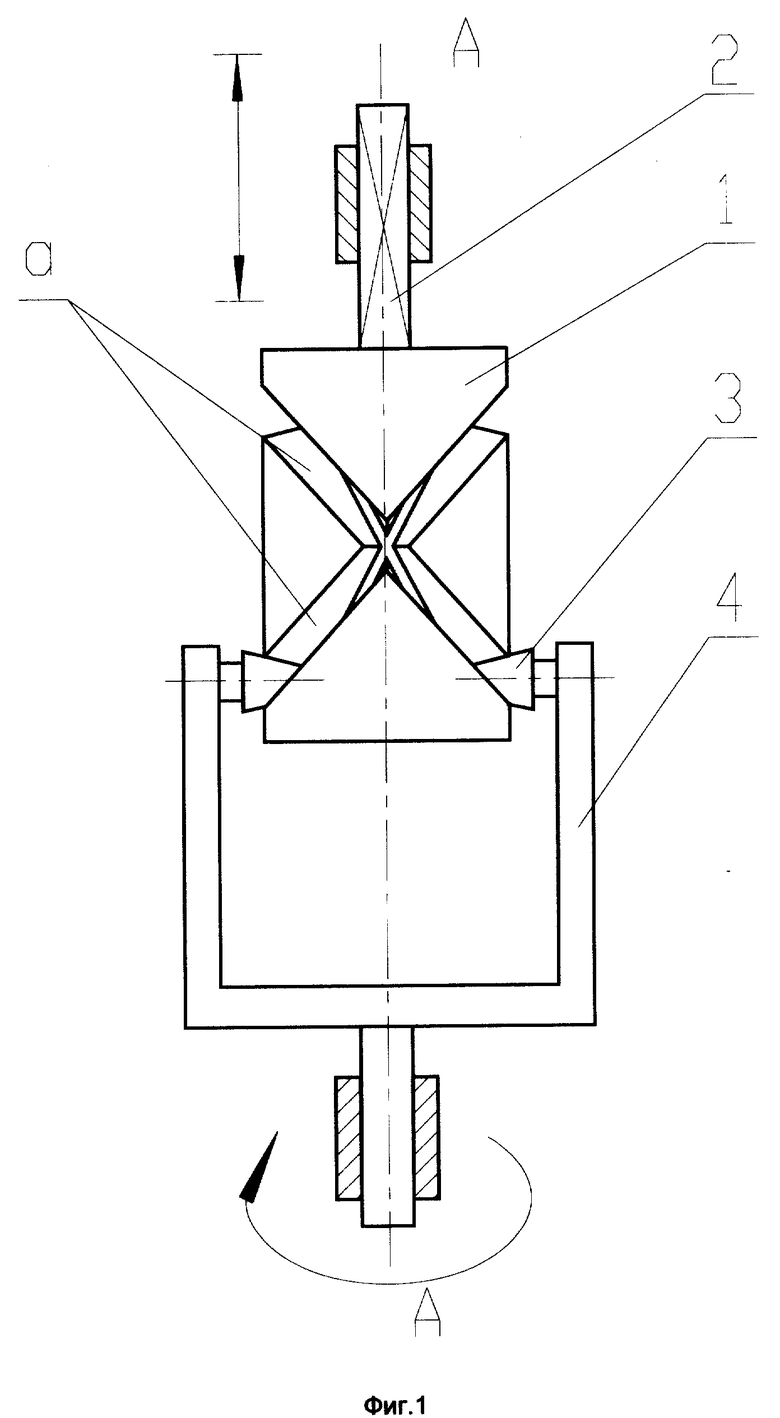
| US, патент N 3792616, F 16 H 25/12, 1974. |

