Изобретение относится к машиностроению, а именно к механизмамдля преобразования вращательного движения ведущего звена в возвратно-поступательное движение ведомого звена с управляемым законом хода и может быть использовано в конструкииях приборов, машин и станков-автоматов.
Известен механизм преобразования вращательного движения в возвратнопоступательное, содержаний приводной вал, звездочки, лиски со скошенными торпами, установленные между ними шарики и взаимодействующую с ними втулку, связанную с шайбой ij,
Недостаток данного механизма заключается в том, что его конструкци не позволяет регулировать величину амплитуды возвратно-поступательного движения.
Наиболее близким по технической сущности к изобретению является устройство для преобразования врашательного движения в возвратнопоступательное, содержащее корпус, привод вращательного движения, преобразов.атель движения, включaюш й пазовый кулачок осевого перемеш,ения и ведомый толкатель 2.
Недостатком известного устройства является невозможность автоматического управления законами сложного движения ведомого толкателя.
Цель изобретения - расширение эксплуатационных возможностей устройства путем автоматизации управления движением ведомого толкателя.
Указанная цель достигается тем, что в устройстве для преобразования вращательного движения в возвратнопоступательное, содержащем корпус, привод вращательного движения, преобразователь движения, включающий пазовый кулачок осевого перемещения и ведомый толкатель, преобразовател движения выполнен в виде кониентрично установленных элементов, каждый из которых состоит из двух запрессованных одна в другую втулок, а кулачок имеет последовательнее противоположно наклонные эллипсообразные пазы и взаимодействует с внутренним элементом при помойки шариков, свободно установленных в пазах кулачка и в соответствующих гнездах, которые выполнены на внутренней поверхности внутреннего элемента, на наружной поверхности последнего выполнены цилиндрические канавки и он взаимодействует с промежуточным элементом при помощи шариков, свободно установленных в цилиндрических канавках и в соответствующих гнездах, которые выполнены на внутренней поверхности промежуточного элемента, на наружной поверхности последнего
выполнены после,иовател1 но противоположно наклонные эллипсообразные канавки и он взаимодействует с наружным элементом при помощи шариков, свободно установленных в эллипсообразных канавках и в соответствующих .гнездах, которые выполнены на внутренней поверхности наружного элемента, на наружной поверхности последнего выполнены гнезда и он взаимодействует с корпусом при помоши шариков, установленных в этих гнездах и в соответствующих шлицевых пазах,, которые выполнены на внутренней цилиндрической поверхности корпуса,
5 устройство снабжено жестко связанным с корпусом стабилизатором возвратно-поступательного перемещения, внутреннего и наружного элементов, датчиком обратной связи, связанным
0 с ведомым толкателем, а привод вращательного движения выполнен в виде электромагнитного тормоза и двух регулируемых электродвигателей, один из которых жестко связан с кулачком
5 и при помощи конической зубчатой передачи, дифференциального механизма и клиноременной передачи - с промежуточным элементом, а другой связан с электромагнитным тормозом и при помощи второй конической зубчатой передачи и тех же дифференциального механизма и клиноременной передачи с промежуточным элементом.
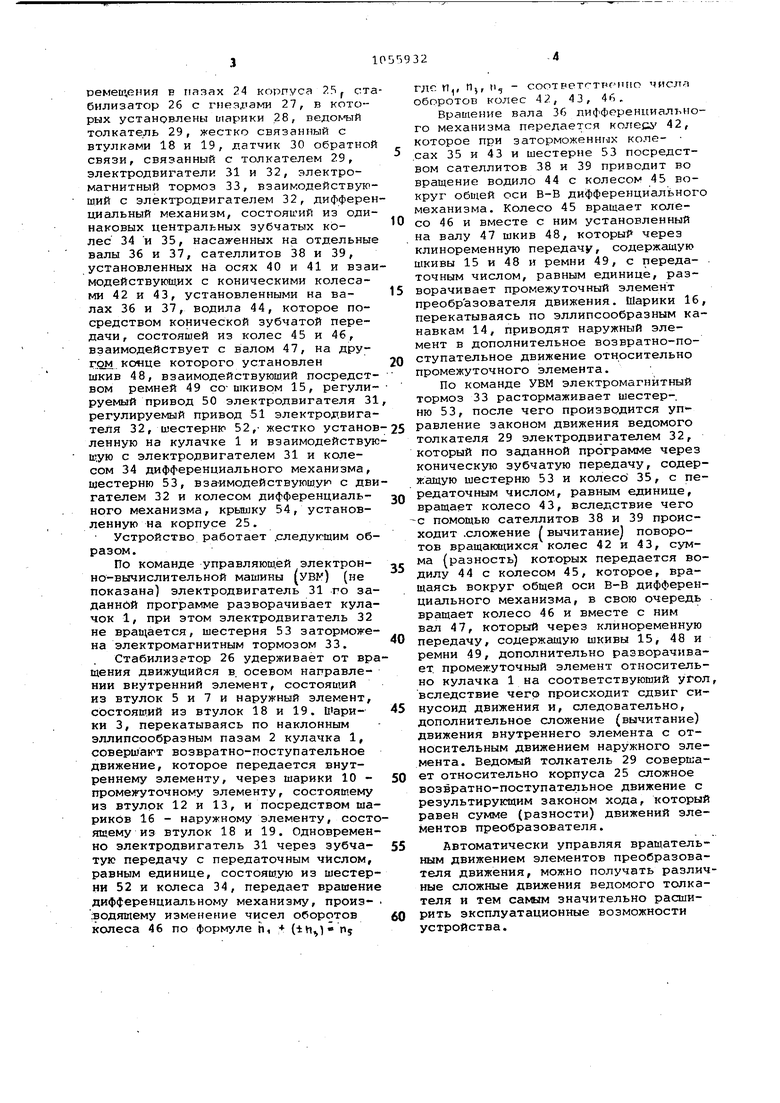
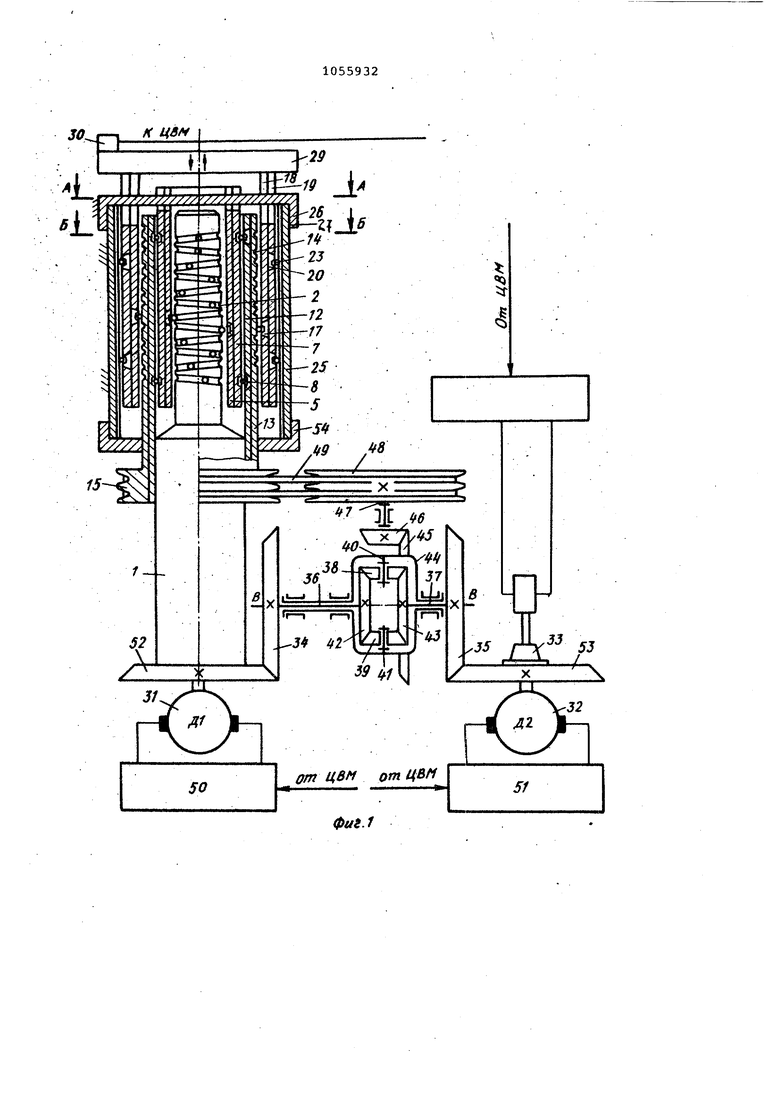
На фиг 1 изображено предлагаемое устройство на фиг. 2 - сечение А-А
на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1.
Устройство содержит пазовый кулачок. 1 с последовательными противоположно наклонными эллипсообразными пазами 2, шарики 3, установленные в пазах 2 кулачка 1 и взаимодействующие с гнездами 4 внутреннего элемента преобразователя движения, состоящего из втулки 5, заканчивающейся
направляющими шлицами 6, и запрессованной на ней втулки 7, выполненной с окружными цилиндрическими канавками 8 и заканчивающейся направляющими шлицами 9, шарики 10, установленные
в канавках 8 втулки 7 и взаимодействующие с гнездами 11 премежуточного элемента, состоящего из втулки 12 и запрессованной на нее втулки 13, выполненной с последовательными противоположно наклонными эллипсообразными канавками 14 и заканчивающейся шкивом 15, шарики 16, установленные в канавках 14 и взаимодействуквдие с гнездами 17 наружного элемента, состоящего из втулки 18 и запрессованной на нее втулки 19 с гнездами 20, заканчивактаихся направляющими 21. ti 22 f шарики 23, установленные в гнездах 20 втулки 19 с возмо;: ностью возвратно-поступательного переме1п,ения в пазах 24 корпуса 2 ст билизатор 26 с гиезд:ами 27, в которых установлены DiapHKH 28, ведомый толкатель 29, жестко связанный с втулками 18 и 19, датчик 30 обратно связи, связанный с толкателем 29, электродвигатели 31 и 32, электромагнитный тормоз 33, взаимодействую щий с электродвигателем 32, диффере циальный механизм, состояний из оди наковых центральных зубчатых колес 34 и 35, насаженных на отдельны валы 36 и 37, сателлитов 38 и 39, установленных на осях 40 и 41 и вза модействующих с коническими колесами 42 и 43, установленными на валах 36 и 37, водила 44, которое посредством конической зубчатой передачи, состоящей из колес 45 и 46, взаимодействует с валом 47, на другом. ко«це которого установлен шкив 48, взаимодействующий посредст вом ремней 49 со-шкивом 15, регули руемый привод 50 электродвигателя 3 регулируемый привод 51 электродвига теля 32, шестерню 52,- жестко уставо ленную на кулачке 1 и взаимодействую щую с электродвигателем 31 и колесом 34 дифференциального механизма, щестерню 53, вза-имодействующую с дви гателем 32 и колесом дифференциального механизма, крышку 54, установленную на корпусе 25. Устройство работает .следующим образом. По команде управляющ.ей электронно-вычислительной машины (увм) (не показана) электродвигатель 31 по заданнбй программе разворачивает кулачок 1, при этом электродвигатель 32 не вращается, шестерня 53 заторможена электромагнитным тормозом 33. Стабилизатор 26 удерживает от вра щения движущийся в. осевом направлении внутренний элемент, состоящий из втулок 5 и 7 и наружный элемент, состоящий из втулок 18 и 19. Иарики 3, перекатываясь по наклонным эллипсообразным пазам 2 кулачка 1, совершают возвратно-поступательное движение, которое передается внутреннему элементу, через шарики 10 промежуточному элементу, состоящему из втулрк 12 и 13, и посредством шариков 16 - наружному элементу, состо ящему из втулок 18 и 19. Одновременно электродвигатель 31 через зубчатую передачу с передаточным числом, равным единице, состоящую из шестерни 52 и колеса 34, передает врашение дифференциальному механизму, произ;водящему изменение чисел оборотов колеса 46 по формуле hi ( п где п., П,, (), - соотретгт сччю числа оборотов колес 42, 43, ). Вращение вала 36 дифференциального механизма передается колесл 42, которое при заторможеннглх колесах 35 и 43 и шестерне 53 посредством сателлитов 38 и 39 приводит во вращение водило 44 с колесом 45 вокруг общей оси В-В дифференциального механизма. Колесо 45 вращает колесо 46 и вместе с ним установленный на валу 47 шкив 48, который через клиноременную передачу, содержащую шкивы 15 и 48 и ремни 49, с передаточным числом, равным единице, разворачивает промежуточный элемент преобразователя движения. Шарики 16, перекатываясь по эллипсообразным канавкам 14, приводят наружный элемент в дополнительное возвратно-поступательное движение относительно промежуточного элемента. По команде УЕМ электромагнитный тормоз 33 растормаживает шестер-. ню 53, после чего производится управление законом движения ведомого толкателя 29 электродвигателем 32, который по заданной программе через коническую зубчатую передачу, содержащую шестерню 53 и колесо 35, с передаточным числом, равным единице, вращает колесо 4 3, вследствие чего с помощью сателлитов 38 и 39 происходит .сложение / вычитание) поворотов вращаюащхся колес 42 и 43, сумма (разность) которых передается водилу 44 с колесом 45, которое, вращаясь вокруг общей оси В-В дифференциального механизма, в свою очередь вращает колесо 46 и вместе с ним вал 47, который через клиноременную передачу, содержащую шкивы 15, 48 и ремни 49, дополнительно разворачивает, промежуточный элемент относительно кулачка 1 на соответствующий угол, вследствие чего происходит сдвиг синусоид движения и, следовательно, дополнительное сложение (вычитание) движения внутреннего элемента с относительным движением наружного элемента. Ведомый толкатель 29 совершает относительно корпуса 25 сложное возвратно-поступательное движение с результирующим законом хода, который равен сумме (разности) движений элементов преобразователя. Автоматически управляя вращательным движением элементов преобразователя движения, можно получать различные сложные движения ведомого толкателя и тем самым значительно расширить эксплуатационные возможности устройства. к
0ui.i ЦВМ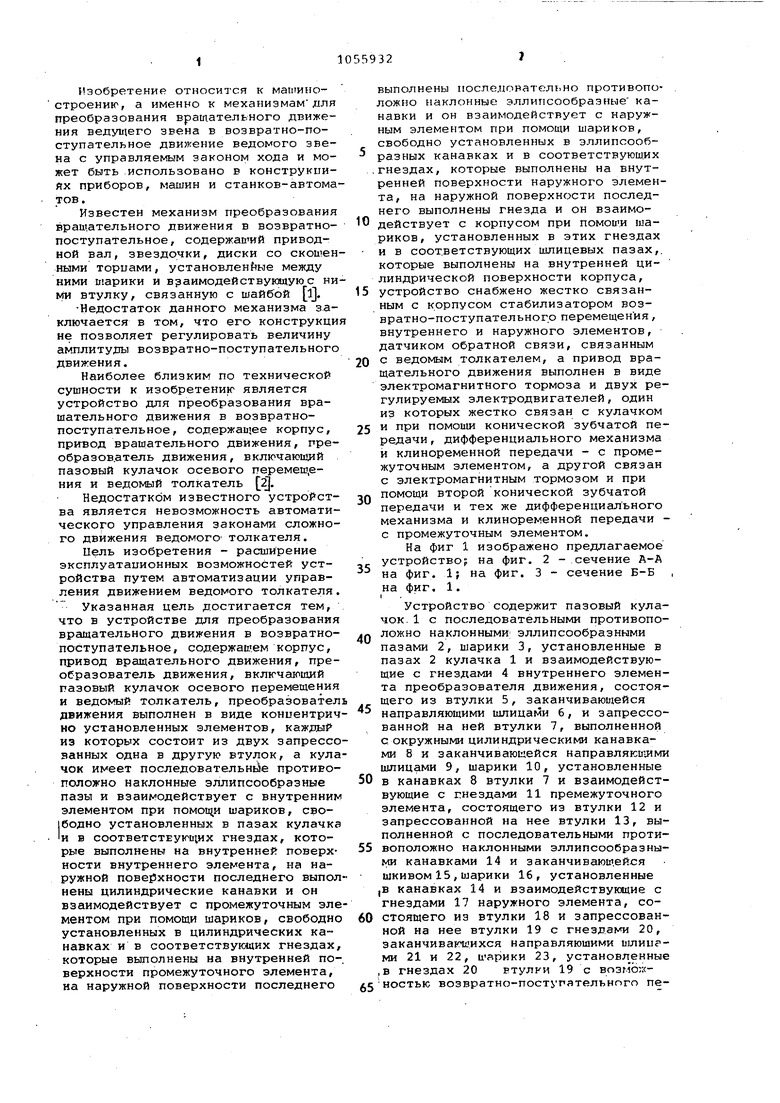
УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАВ НИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ , содержащее корпус,привод вращательного движения, преобразователь движения, включаю1л 1й пазовый кулачок осевого, перемещения, и ведомый толкатель, отличающееся тем, что, с целью расширения эксплуатационных возможностей устройства путем автоматизации уп-, равления движением ведомого.толкателя, преобразователь движения 1ыполнен в виде концентрично установленных элементов, каждый из которых состоит из двух запрессованных одна в другую втулок, а кулачок имеет последовательные противоположно наклонные эллипсообразные пазы и взаимодействует с внутренним элементом при помощи шариков, свободно установленных в пазах кулачка и в соответствующих гнездах, которые выполнены на внутренн1ей поверхности внутреннего элемента, на наружной поверхности последнего выполнены цилиндрические канавки и он взаимодействует с промежуточным 3J3eMeHTOM при помощи шари|Ков, свободно установленных в цилиндрических канавках и в соответствующих гнездах, которые выполнены на внутренней поверхности промежуточного элемента, на наружной поверхности последнего выполнены последовательные противоположно наклонные эллипсообразные канавки и он взаимодействует с наружным элементом при помощи шариков, свободно установленных в эллипсообразных канавках и в соответствующ.их гнездах, которые выполнены на внутренней поверхности наружного элемента, на наружной поверхности последнего выполнены гнезда и он взаи.модействует с корпусом при помощи шариков, установленных в этих гнезда-х i и в соответствующих пшицевых пазах, которые выполнены на внутренней ци(Л линдрической поверхности корпуса, устройство снабжено жестко связанс ным с корпусом стабилизатором воз- вратно-поступательного перемещения -Ч внутреннего и наружного элементов, датчиком обратной связи, связанным с ведомым толкателем, а привод вращательного движения выполнен в виде О (Электромагнитного тормоза и двух ел :л регулируемых электродвигателей, один из которых жестко связан с кулачком и при помощи конической зубчатой пе:о редачи, дифференциального механизма и клиноременной передачи - с промежу точным элементом, а другой связан с элeктpoмaгнитны 5 тормозом и при помощи второй конической зубчатой передачи и тех же дифференциального механизма и клиноременной передачи с п)омежуточиьтм элементом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кожевников С.Н | |||
| и др | |||
| Механизмы, М., Машиностроение 1976, рис | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Музыкальный инструмент со звучащими металлическими пластинками и ручной клавиатурой | 1922 |
|
SU545A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Распределительный механизм для паровых машин | 1921 |
|
SU308A1 |
| Врезной замок с секретным устройством для застопоривания в крайних положениях сдвоенных ригелей | 1923 |
|
SU497A1 |
