Изобретение относится к механизмам, предназначенным для преобразования радиального перемещения пьезокерамики в линейное перемещение подвижного элемента, и может использоваться в исполнительных органах автоматических устройств.
Известно решение линейного двигателя, направленное на увеличение диапазона перемещений подвижного элемента и повышение мощности. Известный двигатель содержит основание с установленными на нем пьезоэлектрическими вибраторами и подвижный элемент в виде планки, по концам которой прикреплены с натягом две гибкие ленты, охватывающие ролики, при этом последние взаимодействуют с вибраторами [1].
Наиболее близким по совокупности признаков аналогом является механизм для осуществления прецизионных поворотных перемещений [2]. Механизм содержит пьезоэлектрический элемент, деформирующийся (сжимающийся и расширяющийся) под действием электрического напряжения, приложенного к размещенным на пьезоэлементе электродам, и подвижную пластину, на которую через соединительный элемент передается деформация пьезоэлектрического элемента. В результате изменяется угол наклона пластины.
Этот угол поворота пластины, т.е. величина перемещения ее свободного конца, находится в пропорциональной зависимости от величины деформации пьезоэлемента в определенном направлении и обусловлен свойствами материала, величиной поданного напряжения и т.д. Величина эта незначительна, поскольку 1 мм пьезокерамики в основном дает приращение в пределах 1 мкм. В результате диапазон перемещений таких устройств незначителен, а область применения ограничена.
Изобретение решает задачу повышения величины перемещения подвижного элемента и передаваемого усилия с целью обеспечения возможности использования устройств, основанных на применении пьезоэффекта, в машиностроительных отраслях промышленности.
Задача решается тем, что для углового поворота подвижного элемента в устройстве перемещения используется изменение величины периметра пьезоэлемента, а в случае выполнения последнего в виде цилиндрического стержня - изменение длины его окружности, кратно увеличенное в зависимости от длины подвижного элемента. Достигается это тем, что в механизме перемещений, содержащем пьезоэлектрический элемент с размещенными на нем электродами, подвижный и соединительный элементы, опору, относительно которой одним концом зафиксирован соединительный элемент, другим концом жестко скрепленный с концом подвижного элемента, установленного с возможностью углового поворота, пьезоэлектрический элемент выполнен преимущественно цилиндрической формы с радиальной поляризацией и незамкнуто охвачен по периметру нерастяжимым соединительным элементом, подвижный элемент выполнен в виде жесткого стержня, свободный поворачивающийся конец которого тягой, направленной под углом к стержню и в сторону, противоположную разомкнутому участку соединительного элемента, связан также с соединительным элементом.
При изменении радиальных размеров пьезоэлектрического элемента цилиндрообразной формы изменяется длина его окружности на некоторую величину 2πΔR , т. е. на величину, в ≈6,283 раз большую, чем изменение величины радиуса окружности. Соединительный элемент, передающий перемещение поверхности пьезоэлемента подвижному элементу, охватывает окружность пьезоэлемента плотно, но незамкнуто, т. е. на определенном участке периметра выполнена прорезь, если условно считать соединительный элемент кольцом. Возникающие при изменении радиальных размеров пьезоэлектрического элемента усилия воздействуют на соединительный элемент, а так как он выполнен нерастяжимым, то эти усилия разгибают его. При условии, что один конец соединительного элемента зафиксирован относительно какой-либо опоры, изменение длины окружности повлечет за собой увеличение разомкнутого участка, т.е. произойдет перемещение свободного конца соединительного элемента по периметру окружности пьезоэлектрического элемента на величину, в 6,283 раза большую, чем перемещение точки окружности пьезоэлемента в радиальном направлении. Если прикрепить к этому соединительному элементу, к его незафиксированному перемещающемуся концу, подвижный элемент в виде жесткого стержня также одним его концом, а второй, удаленный от пьезоэлемента конец стержня связать направленной под углом к этому стержню тягой также с соединительным элементом, то удаленный от пьезоэлемента поворачивающийся конец стержня совершает сложное движение, являющееся результатом суммы двух перемещений: перемещения за счет воздействия соединительного элемента на конец стержня, с которым он жестко связан, и перемещения за счет воздействия этого же соединительного элемента через тягу непосредственно на поворачивающийся конец стержня. Величина перемещения этого конца будет тем больше, чем больше длина стержня.
Если на один пьезоэлемент смонтировать несколько аналогичных жестких стержней с тягами и незамкнуто охватывающими пьезоэлемент по периметру соединительными элементами таким образом, что на периметре пьезоэлемента участки соединительных элементов четных стержней размещены на одной линии по образующей пьезоэлемента по одну сторону относительно плоскости, проходящей через продольную ось пьезоэлемента, а разомкнутые участки соединительных элементов нечетных стержней -оппозитно, по другую сторону упомянутой плоскости, то при увеличении диаметра пьезоэлемента поворачивающиеся концы четных и нечетных стержней разойдутся в разные стороны, образуя между собой расстояние, равное двукратному перемещению конца одного стержня. Это двукратное увеличение может использоваться в исполнительных механизмах при условии свободной установки в пространстве пьезоэлемента и фиксации поворачивающихся концов или четных или нечетных стержней. При фиксации поворачивающихся концов, например, четных стержней радиальная деформация пьезоэлемента повлечет за собой перемещение в пространстве самого пьезоэлемента на расстояние, на которое переместились бы упомянутые концы, если бы они не были зафиксированы. Вместе с пьезоэлементом перемещаются охватывающие его соединительные элементы и нечетные стержни, концы которых повернутся также и за счет радиальной деформации пьезоэлемента, как это описано выше. Таким образом, перемещение концов этих нечетных стержней является результатом сложного движения и в два раза превышает перемещение поворачивающегося конца одного стержня. При этом устройство обеспечивает многократное в зависимости от количества установленных на пьезоэлементе стержней повышение передаваемых усилий.
Такой же эффект, т.е. повышение передаваемых усилий, но без увеличения перемещения по сравнению с установкой на пьезоэлементе одного стержня имеет место в том случае, если на один пьезоэлемент смонтировано n-е количество стержней с тягами и соединительными элементами, охватывающими незамкнуто по периметру пьезоэлектрический элемент, таким образом, что разомкнутые участки соединительных элементов всех стержней размещены на одной линии по образующей пьезоэлемента, а четные и нечетные стержни установлены оппозитно друг другу относительно плоскости, проходящей через продольную ось пьезоэлемента и упомянутую линию по образующей. Поворачивающиеся концы четных и нечетных стержней в этом случае находятся по разные стороны относительно пьезоэлемента и осуществляют перемещения, которые разнесены в пространстве на расстояние, включающее две длины стержня.
При установке на пьезоэлементе более одного стержня с тягой и соединительным элементом оптимальным является использование в качестве опоры для фиксирующего конца соединительного элемента аналогичного конца рядом лежащего соединительного элемента. Так как разомкнутые участки рядом лежащих соединительных элементов размещены на пьезоэлементе оппозитно друг другу, при деформации пьезоэлемента силы, разгибающие концы соединительных элементов, направлены в противоположные стороны. Если концы, которые нужно зафиксировать, связать между собой жестким элементом, то эти силы будут уравновешивать друг друга, и связанные концы соединительных элементов останутся неподвижными. Тот же результат достигается при выполнении фиксирующих концов с выступами и установкой между этими выступами в распор упорного элемента, например распорной пластины.
Диапазон осуществляемых механизмом перемещений и величина передаваемых усилий значительно возрастают при комбинации пьезоэлемента с установленными на его периметре стержнями с соединительными элементами и тягами по меньшей мере еще с одним аналогичным пьезоэлементом, несущим аналогичные стержни с соединительными элементами и тягами, при этом пьезоэлементы смонтированы таким образом, что стержни рядом лежащих пьезоэлементов установлены с возможностью опорного взаимодействия поворачивающимися концами. Концы стержней, которые перемещаются противонаправлено, связаны между собой и при деформации пьезоэлементов препятствуют движению друг друга, вынуждая перемещаться в пространстве пьезоэлементы. Величина перемещения пьезоэлементов при этом определяется суммой величин перемещений, на которые бы повернулись концы стержней в свободном состоянии.
Возможно исполнение устройства с несколькими пьезоэлементами, в котором пьезоэлементы и стержни установлены в шахматном порядке, при этом поворачивающийся конец стержня одного пьезоэлемента связан с фиксирующимся концом соединительного элемента второго пьезоэлемента, поворачивающийся конец стержня этого пьезоэлемента - с фиксирующимся концом соединительного элемента третьего пьезоэлемента и т.д. В результате образуется цепь из совокупности пьезоэлементов с поворачивающимися стержнями, а получаемое устройством перемещение равно сумме перемещений звеньев такой цепи.
Таким образом, задача расширения диапазона перемещений и передаваемых усилий решена созданием элементарного устройства, которое по сравнению с прототипом эту задачу решает благодаря новой совокупности конструктивных признаков. Вместе с тем эффективность изобретения многократно возрастает, если использовать это устройство как составляющий элемент разнообразных комбинаций. Осуществляя различную установку совокупности таких элементарных устройств и обеспечивая ту или иную связь между ними (как правило, эта связь представляет собой опору одного элемента для другого), возможно получение множества высокоэффективных механизмов перемещения.
При анализе уровня техники не было выявлено решений, которые совпадали бы с заявляемым по совокупности существенных признаков или из которых явным образом следовало бы заявляемое изобретение.
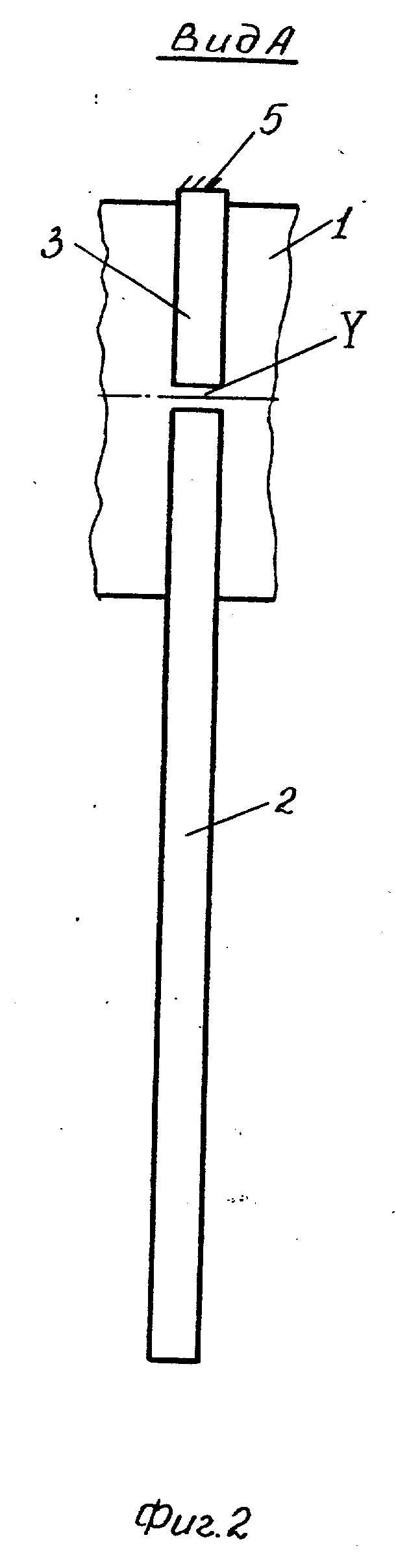
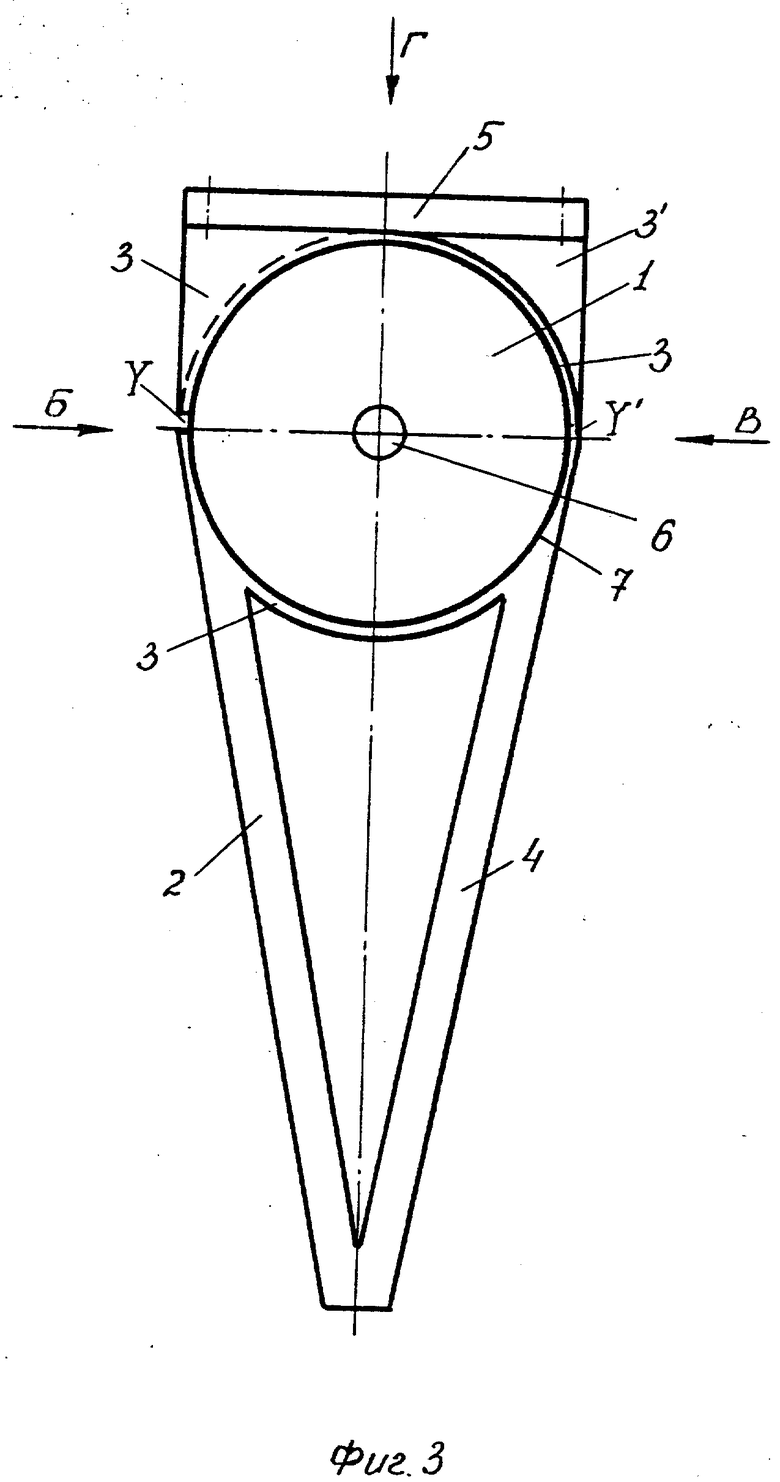
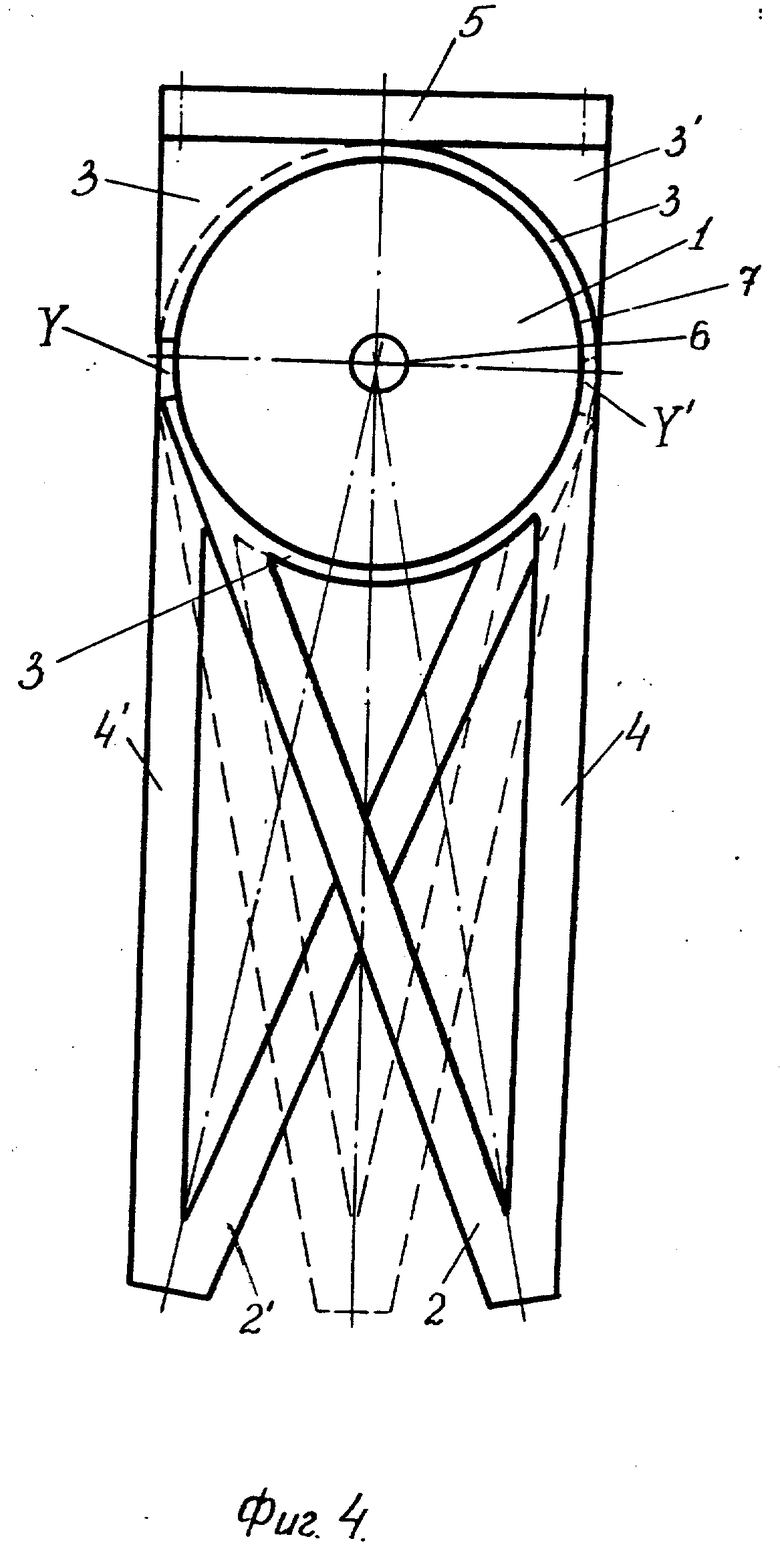
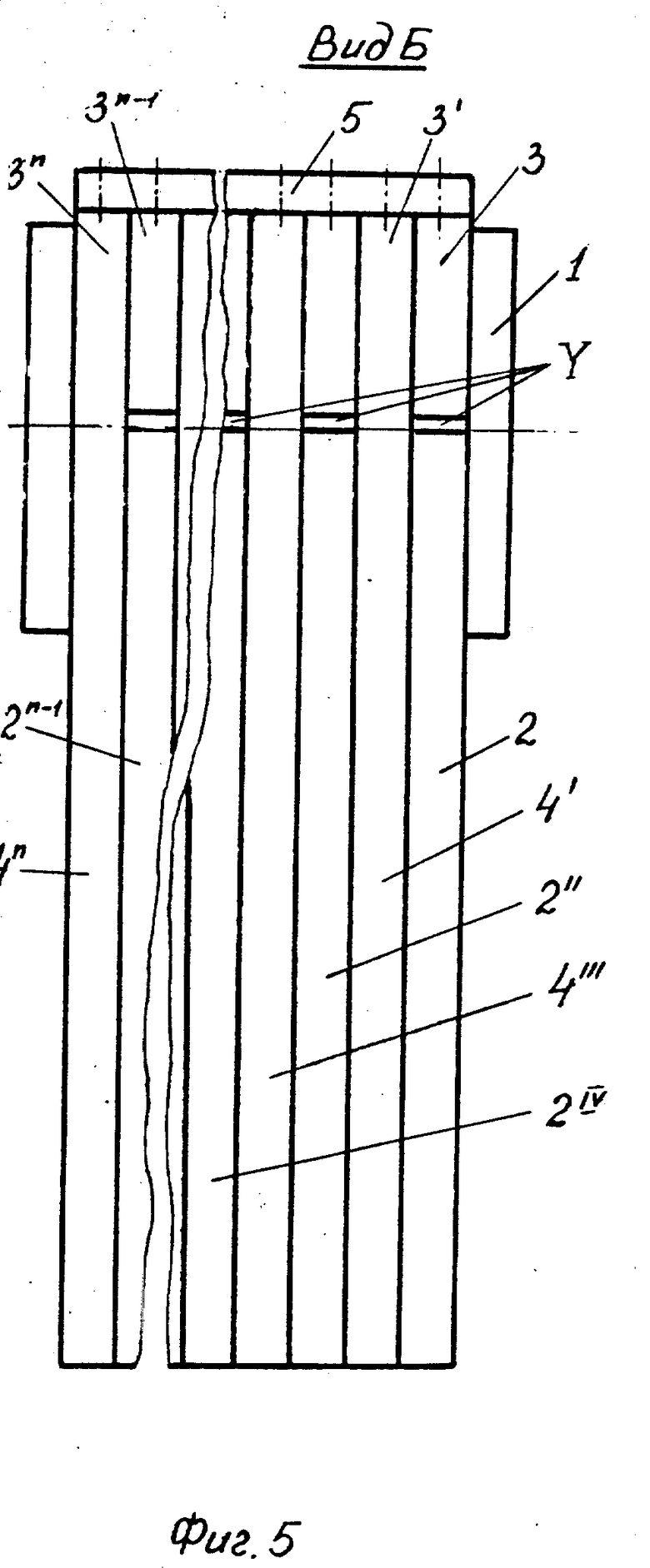
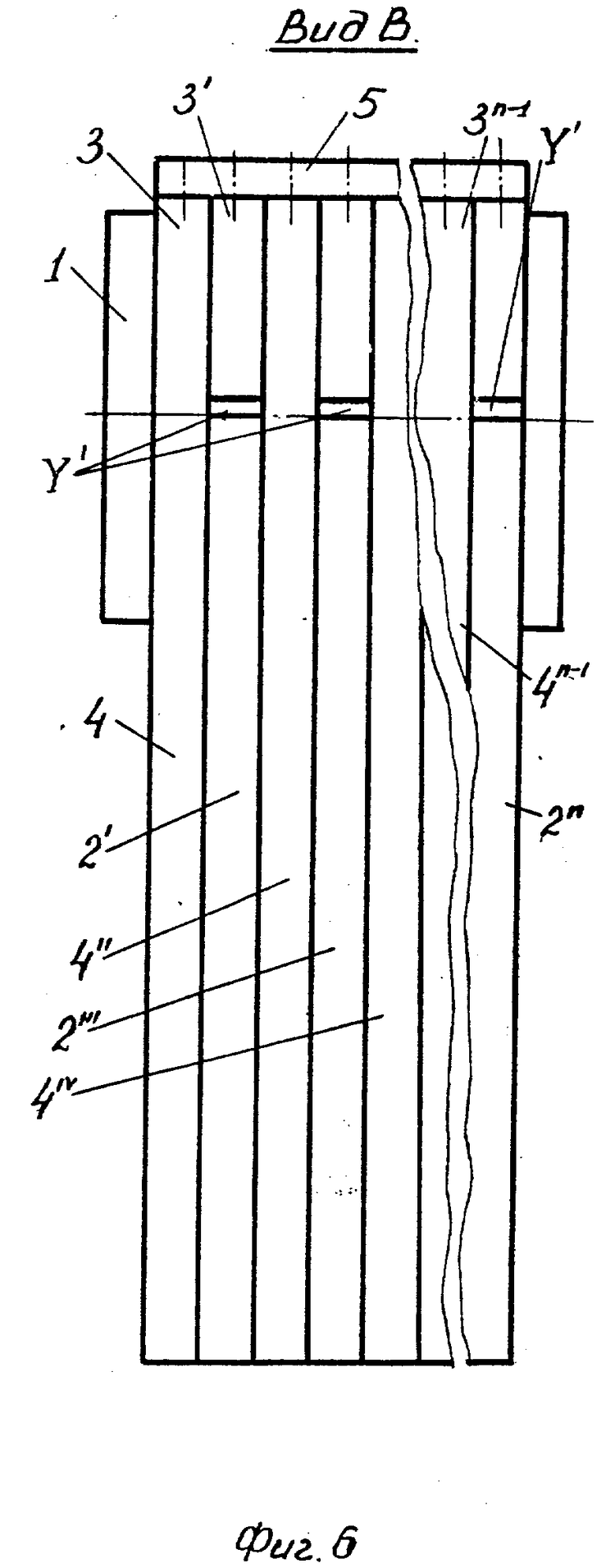
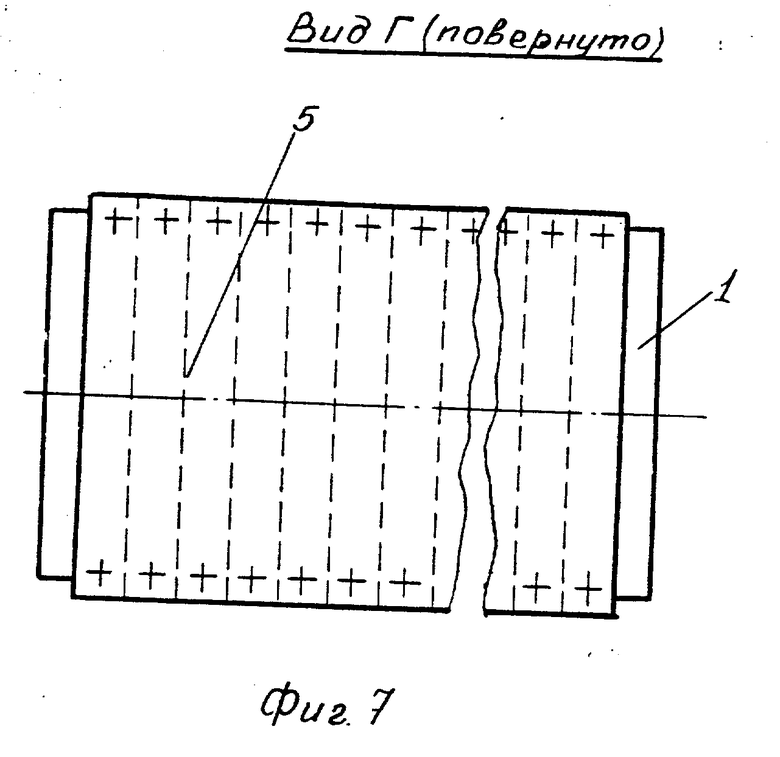
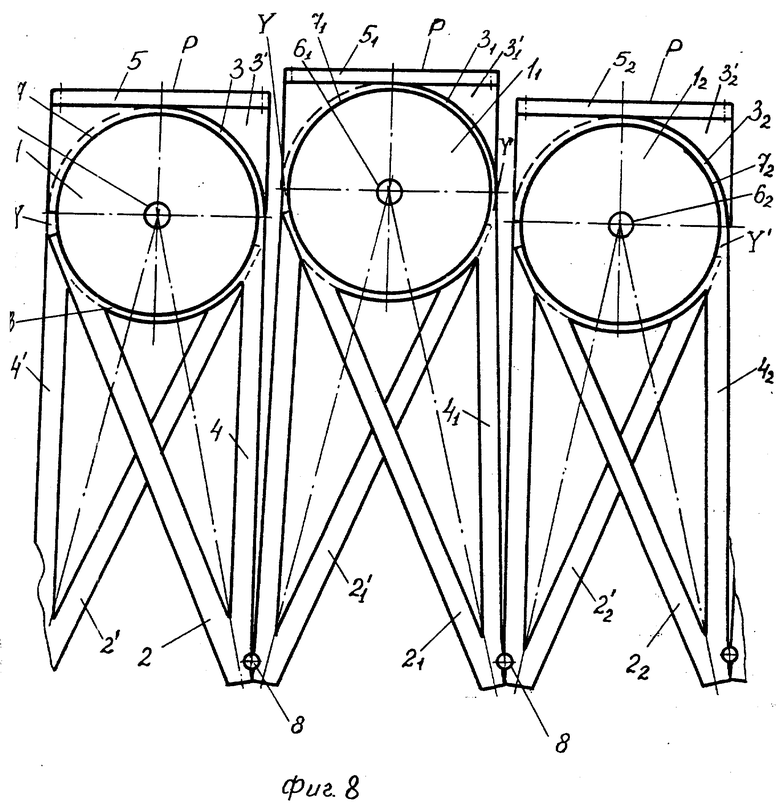
На фиг. 1 представлен механизм перемещений, содержащий один стержень с тягой и соединительным элементом; на фиг. 2 - вид A на фиг. 1; на фиг. 3 - механизм перемещений, содержащий n-е количество стержней с тягами и соединительными элементами на одном пьезоэлементе; на фиг. 4 - тот же механизм при увеличенных радиальных размерах пьезоэлемента в результате его деформации; на фиг. 5 - вид Б на фиг. 3; на фиг. 6 - вид В на фиг. 3; на фиг. 7 - вид Г на фиг. 3; на фиг. 8 - механизм перемещений с несколькими пьезоэлементами.
Механизм перемещений (фиг. 1, 2) содержит цилиндрический пьезоэлемент 1, подвижный элемент 2 в виде поворачивающегося стержня, жестко прикрепленного одним концом а к концу соединительного элемента 3, и тягу 4, соединяющую второй, поворачивающийся конец b стержня также с соединительным элементом 3. Соединительный элемент 3 охватывает пьезоэлемент 1 по периметру плотно, но незамкнуто, оставляя участок Y на периметре пьезоэлемента разомкнутым. Например, соединительный элемент может быть выполнен в виде тонкого упругого кольца с радиальной прорезью. Один конец соединительного элемента 3 зафиксирован на опоре 5, а второй конец жестко связан с концом а стержня 2. Зафиксированный конец может быть выполнен в виде выступа на кольце. Тяга 4, соединяющая второй поворачивающийся конец b стержня 2 также с соединительным элементом, направлена под углом к стержню и по касательной линии к периметру пьезоэлемента и соединительного элемента (поскольку соединительный элемент повторяет форму пьезоэлемента) и скреплена в точке c касания с соединительным элементом 3. Практически подвижный стержень 2, соединительный элемент 3 и тяга 4 могут быть выполнены в виде единой вырубленной из стального листа пластины, по форме приближенной к прямоугольному треугольнику с вписанной окружностью и скругленным по этой окружности прямым углом. Гипотенуза такого условного треугольника по линии, совпадающей с радиусом окружности, имеет прорезь и острые углы: один закреплен относительно опоры, а второй, более удаленный от центра окружности, является подвижным.
Пьезоэлектрический элемент 1 радиально поляризован, снабжен двумя электродами: центральным, размещенным по оси цилиндра электродом 6 и напыленным на цилиндрической поверхности пьезоэлемента электродом 7.
Механизм перемещений (фиг. 3 - 7) может содержать несколько поворачивающихся стержней 2, 2', 2''...2n и соответственно соединительных элементов 3, 3', 3'', 3'''...3n, тяг 4, 4', 4'', 4'''...4n, установленных рядом на одном пьезоэлементе.
Каждый второй стержень установлен таким образом (фиг. 5, 6), что разомкнутый участок Y' его соединительного элемента размещен оппозитно разомкнутому участку Y соединительного элемента нечетного стержня, т.е. четные и нечетные стержни с тягами и соединительными элементами установлены на пьезоэлементе в зеркальном положении. При этом разомкнутые участки соединительных элементов четных стержней размещены на одной линии по образующей пьезоэлемента, а участки соединительных элементов нечетных стержней - на аналогичной диаметрально противолежащей линии. Опора 5 выполнена в виде жесткой пластины, к которой, например, привинчены фиксирующиеся концы соединительных элементов.
Механизм перемещений с несколькими пьезоэлементами (фиг. 8) содержит параллельно установленные цилиндрические пьезоэлементы 1, 11, 12 и т.д. На каждом из указанных пьезоэлементов установлены ряды поворачивающихся стержней 2, 2', 2'', 2''', ...2n с соединительными элементами 3, 3', 3'', 3''', ...3n и тягами 4, 4', 4'', 4'''...4n. Фиксирующиеся концы соединительных элементов каждого пьезоэлемента скреплены жесткими пластинами 5, 51, 52 и т.д. с рабочей поверхностью p. Поворачивающиеся концы стержней одного пьезоэлемента находятся в опорном взаимодействии с поворачивающимися концами стержней рядом лежащих пьезоэлементов. Рассмотрим пьезоэлемент 11: стержни 2
Устройство работает следующим образом.
При подаче напряжения на электроды 6 и 7 пьезоэлемента 1 последний изменяет радиальные размеры. Соединительный элемент 3 передает деформацию пьезоэлемента непосредственно и через тягу 4 на стержень 2, поворачивая его на определенный угол. При отключении напряжения стержень 2 возвращается вследствие упругости соединительного элемента в первоначальное положение.
Аналогично работает механизм с несколькими стержнями. При подаче напряжения деформируется пьезоэлемент 1, стержни 2, 2II, 2IV,...2n-1 и стержни 2I, 2III, . ..2n отклоняются в разные стороны. Если зафиксировать поворачивающиеся концы стержней 2, 2II, 2IV,...2n-1, то при подаче напряжения происходит одновременное перемещение пьезоэлемента и концов стержней 2I, 2III,.. .2n. Перемещение концов стержней 2I, 2III,...2n является в этом случае рабочим исполнительным перемещением.
В механизме с несколькими пьезоэлементами 1, 11, 12,... при одновременной подаче напряжения на электроды всех пьезоэлементов последние изменяют радиальные размеры. Стержни, каждый из которых своим поворачивающимся концом упирается в противонаправленно поворачивающийся конец другого стержня, установленного на рядом лежащем пьезоэлементе, заставляют перемещаться все пьезоэлементы 1, 11, 12,... с охватывающими их соединительными элементами 3, 3', 3'',... 3n, 31, 3
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОПРИВОД | 2004 |
|
RU2281598C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2194244C2 |
| Способ реконфигурирования колеса и реконфигурируемое колесо для его осуществления | 2017 |
|
RU2700155C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИБОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2472253C1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2351119C1 |
| ГРЕЙФЕР | 2013 |
|
RU2633814C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКАЯ ФРИКЦИОННАЯ МУФТА | 1991 |
|
RU2019751C1 |
Использование: механизм предназначен для преобразования радиального перемещения пьезокерамики в линейное перемещение подвижного элемена и может быть использован в исполнительных органах автоматических устройств. Сущность изобретения: механизм перемещений содержит радиально поляризованный пьезоэлемент преимущественно цилиндрической формы. Этот пьезоэлемент по периметру охвачен соединительным элементом, который одним концом зафиксирован относительно опоры, а другим концом жестко соединен с концом подвижного элемента, выполненного в виде стержня. Второй конец этого стержня тягой, направленной по касательной к пьезоэлементу, связан также с соединительным элементом. При деформации пьезоэлемента под действием соединительного элемента и тяги стержень поворачивается на определенный угол. Диапазон перемещений и передаваемые усилия значительно возрастают при комбинации на одном пьезоэлементе n-го количества стержней с соединительными элементами и тягами, а также при комбинации n-го количества пьезоэлементов, несущих стержни с соединительными элементами и тяги. 6 з.п. ф-лы, 8 ил.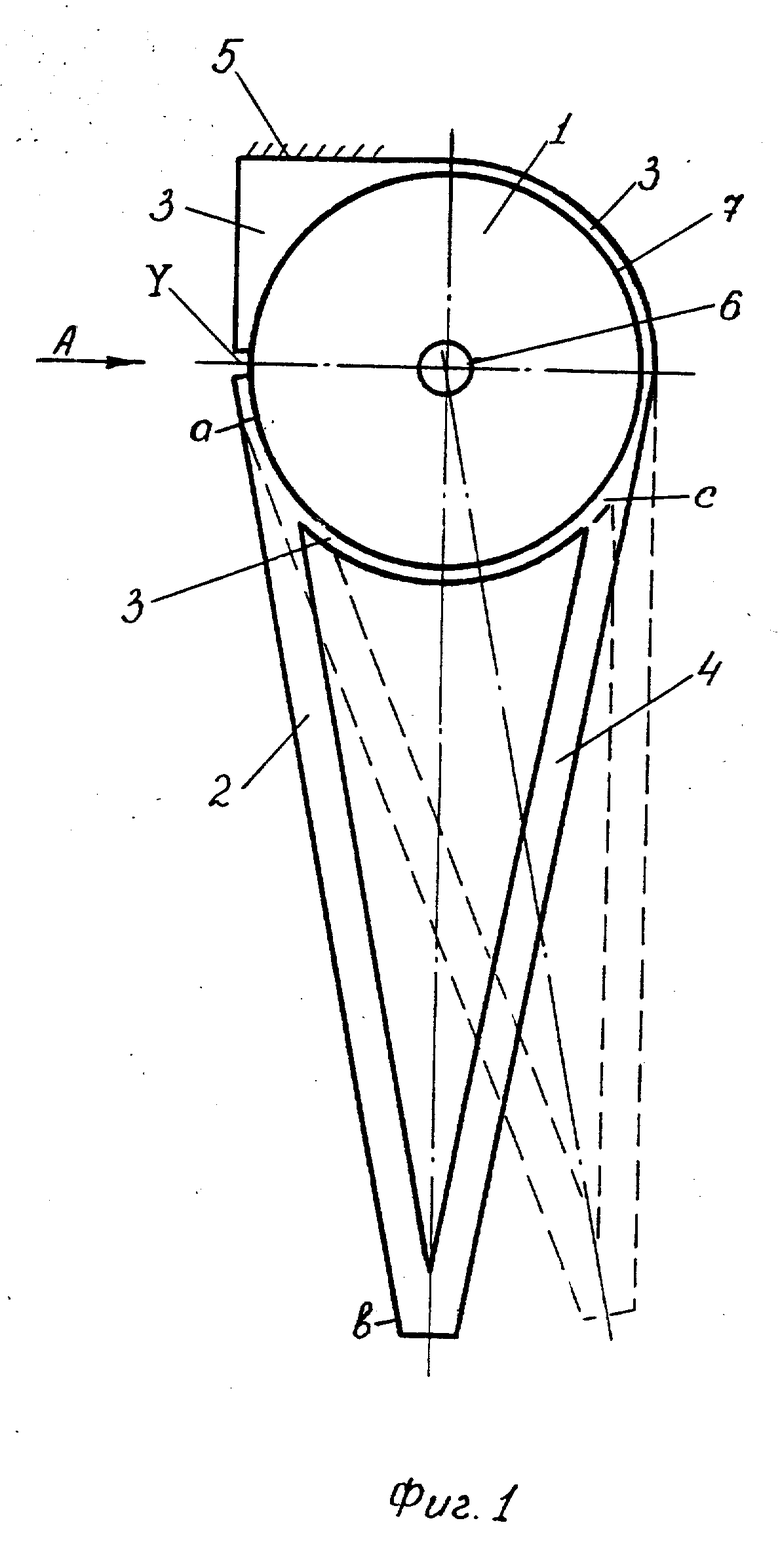
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Линейный двигатель | 1979 |
|
SU819863A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
