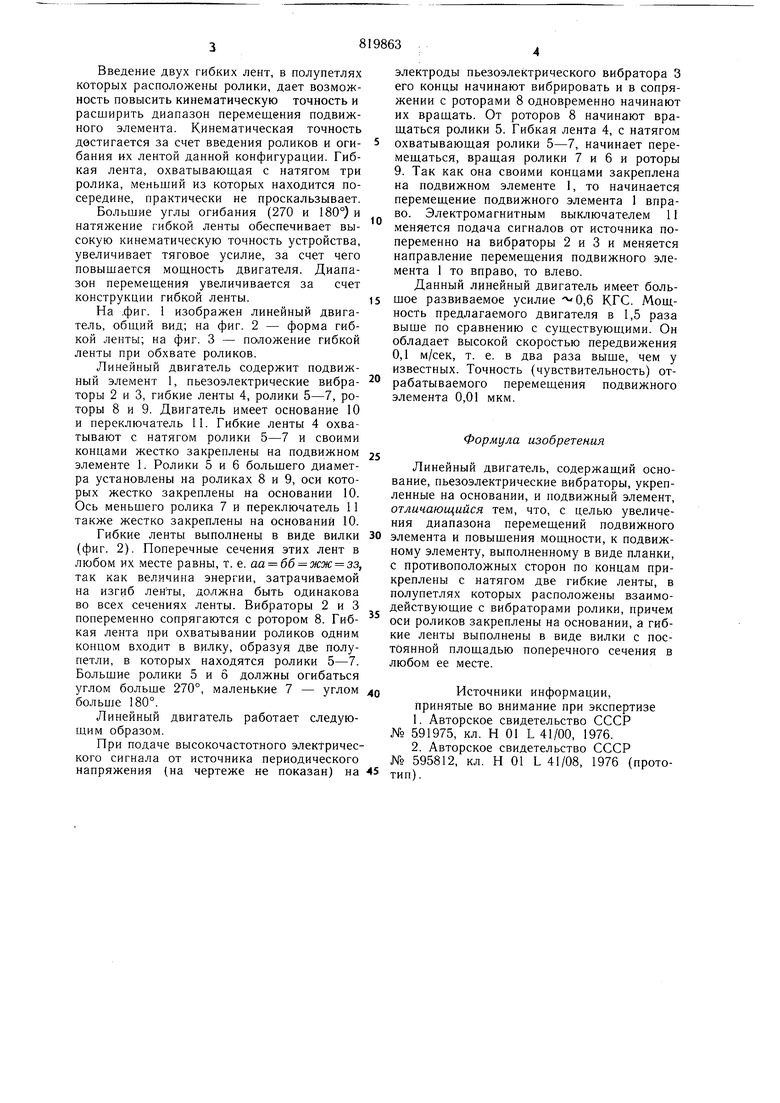
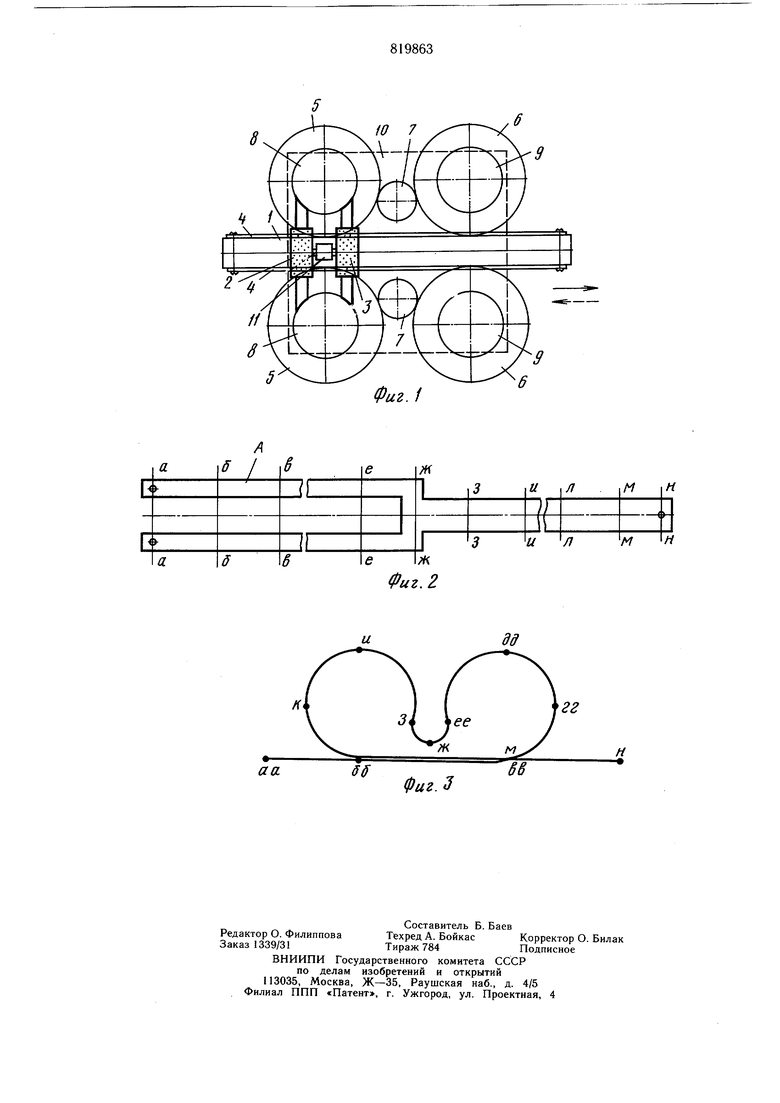
(54) ЛИНЕЙНЫЙ ДВИГАТЕЛЬ Введение двух гибких лент, в полупетлях которых расположены ролики, дает возможность повысить кинематическую точность и расширить диапазон перемещения подвижного элемента. Кинематическая точность достигается за счет введения роликов и огибания их лентой данной конфигурации. Гибкая лента, охватывающая с натягом три ролика, меньший из которых находится посередине, практически не проскальзывает. Большие углы огибания (270 и 180°) и натяжение гибкой ленты обеспечивает высокую кинематическую точность устройства, увеличивает тяговое усилие, за счет чего повышается мощность двигателя. Диапазон перемещения увеличивается за счет конструкции гибкой ленты. На .фиг. 1 изображен линейный двигатель, общий вид; на фиг. 2 - форма гибкой ленты; на фиг. 3 - положение гибкой ленты при обхвате роликов. Линейный двигатель содержит подвижный элемент 1, пьезоэлектрические вибраторы 2 и 3, гибкие ленты 4, ролики 5-7, роторы 8 и 9. Двигатель имеет основание 10 и переключатель П. Гибкие ленты 4 охватывают с натягом ролики 5-7 и своими концами жестко закреплены на подвижном элементе 1. Ролики 5 и 6 большего диаметра установлены на роликах 8 и 9, оси которых жестко закреплены на основании 10. Ось меньшего ролика 7 и переключатель 11 также жестко закреплены на оснований 10. Гибкие ленты выполнены в виде вилки (фиг. 2). Поперечные сечения этих лент в любом их месте равны, т. е. аа - бб жж зз, так как величина энергии, затрачиваемой на изгиб ленты, должна быть одинакова во всех сечениях ленты. Вибраторы 2 и 3 попеременно сопрягаются с ротором 8. Гибкая лента при охватывании роликов одним концом входит в вилку, образуя две полупетли, в которых находятся ролики 5-7. Больщие ролики 5 и б должны огибаться углом больше 270°, маленькие 7 - углом больше 180°. Линейный двигатель работает следующим образом. При подаче высокочастотного электрического сигнала от источника периодического напряжения (на чертеже не показан) на электроды пьезоэлектрического вибратора 3 его концы начинают вибрировать и в сопряжении с роторами 8 одновременно начинают их вращать. От роторов 8 начинают вращаться ролики 5. Гибкая лента 4, с натягом охватывающая ролики 5-7, начинает перемещаться, вращая ролики 7 и 6 и роторы 9. Так как она своими концами закреплена на подвижном элементе 1, то начинается перемещение подвижного элемента 1 вправо. Электромагнитным выключателем 11 меняется подача сигналов от источника попеременно на вибраторы 2 и 3 и меняется направление перемещения подвижного элемента 1 то вправо, то влево. Данный линейный двигатель имеет большое развиваемое усилие 0,6 КГС. Мощность предлагаемого двигателя в 1,5 раза выше по сравнению с существующими. Он обладает высокой скоростью передвижения 0,1 м/сек, т. е. в два раза выше, чем у известных. Точность (чувствительность) отрабатываемого перемещения подвижного элемента 0,01 мкм. Формула изобретения Линейный двигатель, содержащий основание, пьезоэлектрические вибраторы, укрепленные на основании, и подвижный элемент, отличающийся тем, что, с целью увеличения диапазона перемещений подвижного элемента и повышения мощности, к подвижному элементу, выполненному в виде планки, с противоположных сторон по концам прикреплены с натягом две гибкие ленты, в полупетлях которых расположены взаимодействующие с вибраторами ролики, причем оси роликов закреплены на основании, а гибкие ленты выполнены в виде вилки с постоянной площадью поперечного сечения в любом ее месте. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 591975, кл. Н 01 L 41/00, 1976. 2.Авторское свидетельство СССР № 595812, кл. Н 01 L 41/08, 1976 (прототип).
8
Фиг.1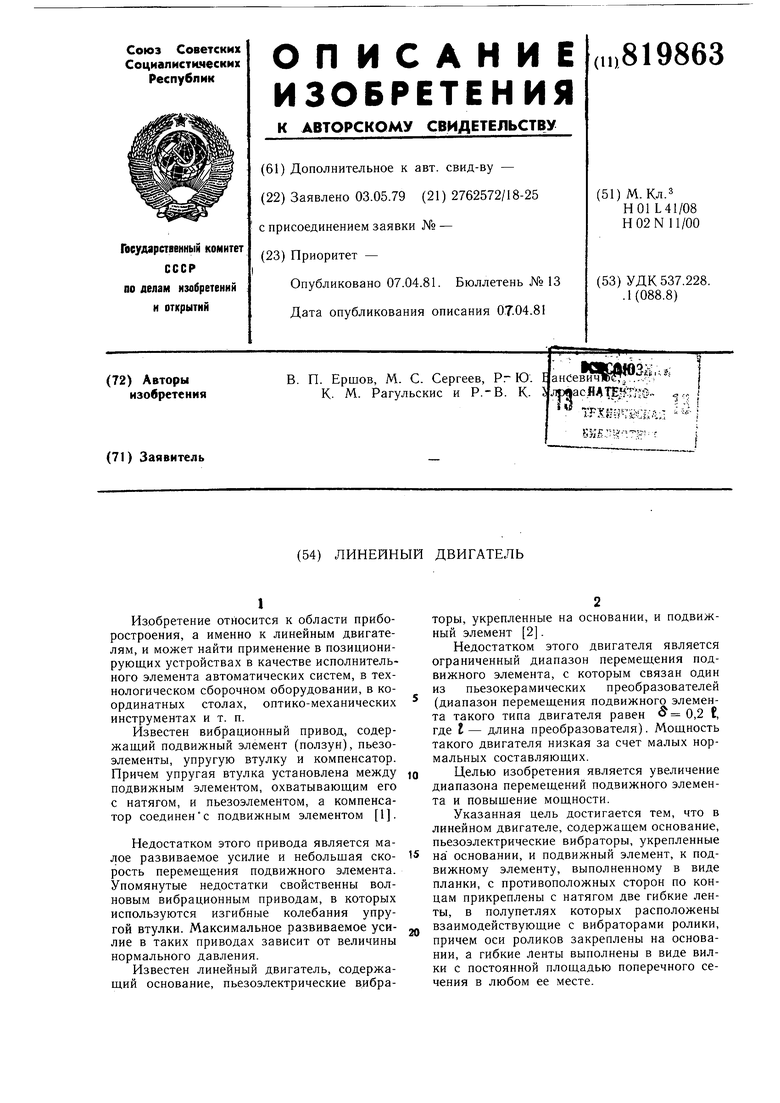
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2074491C1 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| Лентопротяжный механизм | 1979 |
|
SU980153A1 |
| Устройство для ориентации подложек | 1980 |
|
SU917365A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2115995C1 |
| Регулятор линейной плотности волокнистой ленты на текстильной машине | 1984 |
|
SU1315534A1 |
| Опора прямолинейного перемещения | 1979 |
|
SU863901A1 |
| Устройство для позиционирования магнитной головки | 1989 |
|
SU1686476A1 |
| МАШИНА ДЛЯ СНИЖЕНИЯ ВЛАГОСОДЕРЖАНИЯ САПРОПЕЛЯ | 2007 |
|
RU2336255C1 |
| Устройство для обмера фигуры человека | 1988 |
|
SU1570703A1 |
к
аа
Фиг. г
н
SB
Фиг.З
