Изобретение относится к области транспорта, в частности к конструкциям транспортных средств с электроприводом.
Известно транспортное средство с электроприводом, содержащее несущее основание (кузов), электрическую силовую установку и шасси, задние ведущие колеса которого связаны с силовой установкой, а переднее управляемое колесо связано с рулевым приводом и снабжено ступицей и закрепленным на ней ободом с одним телом качения, заявка ФРГ 3244922 B 60 N 1/02, 1984.
Данное техническое решение является наиболее близким к изобретению по технической сущности и достигаемому результату.
Недостатком известного устройства является невысокая маневренность и сложность управления.
Задачей, на решение которой направлено изобретение, является создание новой высокоманевренной и легкоуправляемой конструкции транспортного средства с электроприводом.
Указанная задача решается за счет того, что в известной конструкции транспортного средства ведущие колеса выполнены в виде мотор-колес. Ось вращения ступицы каждого управляемого колеса установлена в неподвижных относительно кузова опорах вдоль транспортного средства с возможностью поворота обода со ступицей вокруг ее оси вращения от рулевого привода. На ободе этого управляемого колеса равномерно по окружности установлено несколько тел качения, ось вращения каждого из которых расположена в плоскости перпендикулярной оси вращения ступицы ортогонально радиусу колеса, беговая дорожка которого образована наиболее удаленными от оси вращения ступицы участками беговых дорожек тел качения.
Транспортное средство может быть снабжено гироскопической системой корректировки направления движения, связанной с ведущими колесами. На шасси может быть установлен тормоз на каждом управляемом колесе, в виде конуса, размещенного в пространстве между телами качения с возможностью перемещения вдоль ост ступицы и взаимодействия с телами качения. Тела качения могут быть разного диаметра, при этом большие установлены на одинаковом расстоянии друг от друга. Тел качения большего диаметра может быть не менее трех.
Конкретный технический результата, который может быть достигнут при использовании изобретения, заключается в повышении маневренности и облегчении управления транспортным средством с электроприводом.
Примером промышленной применимости изобретения является конструкция транспортного средства, представленная на фиг. 1,2 и 3 с трехколесным шасси.
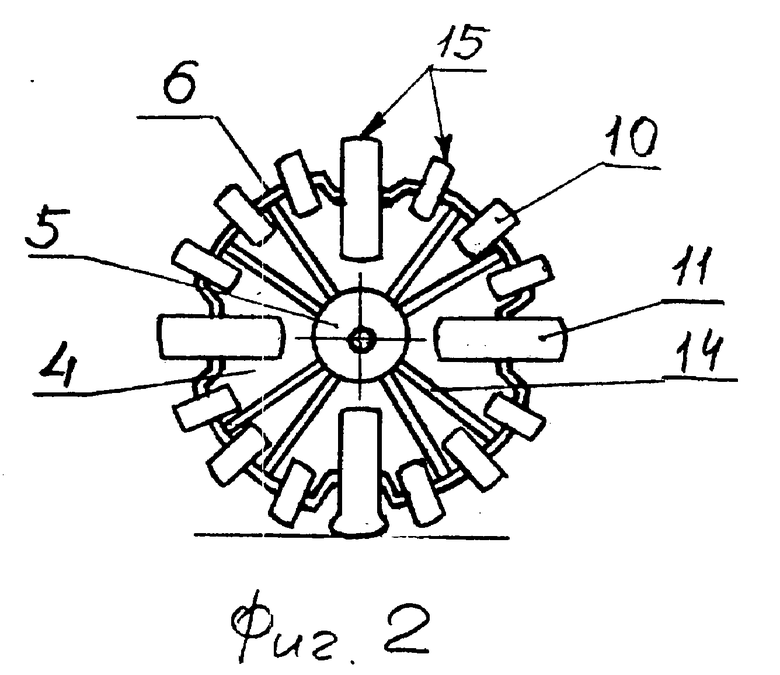
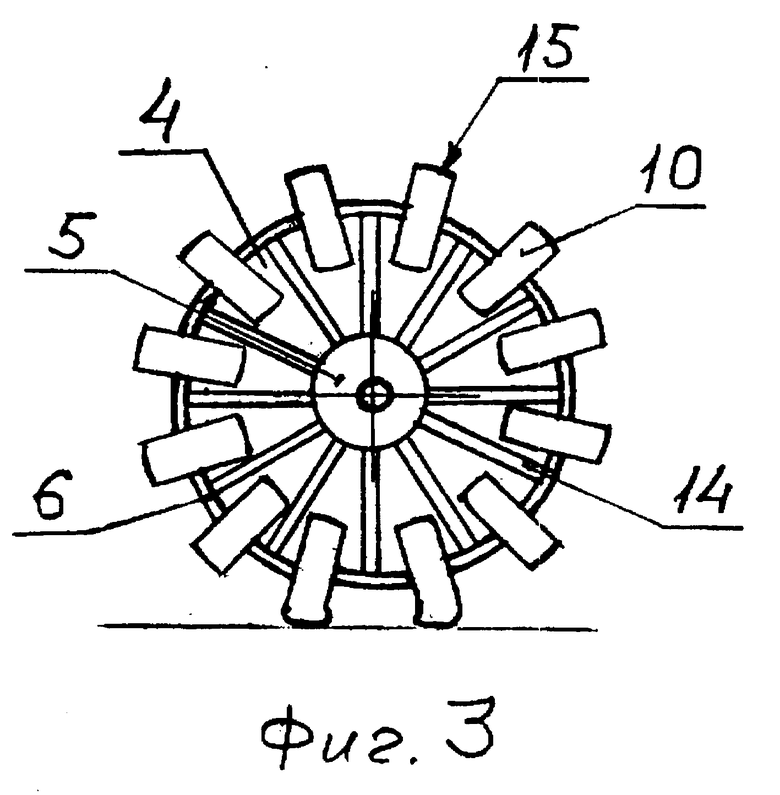
На фиг. 1 изображена схема транспортного средства; на фиг. 2 - узел переднего управляемого колеса, у которого имеется четыре тела качения большего диаметра (вид по оси ступицы); на фиг. 3 - узел переднего управляемого колеса, у которого все тела качения одного диаметра и транспортное средство опирается одновременно на два тела качения.
Транспортное средство содержит кузов 1, электрическую силовую установку 2 и шасси с задними ведущими колесами 3 и передним управляемым колесом 4.
Управляемых колес может быть и два, как в обычном четырехколесном автомобиле. Задние ведущие колеса выполнены в виде мотор-колес с электрическим приводом. Переднее управляемое колесо имеет ступицу 5 и обод 6. Ось 7 вращения ступицы установлена в неподвижных относительно кузова опорах вдоль транспортного средства с возможностью поворота обода со ступицей вокруг ее оси вращения от рулевого колеса 8 через зубчатую передачу 9 (передача может быть и цепной и ременной). При наличии двух управляемых колес они оба через передачу соединены с рулевым колесом.
При использовании зубчатой передачи необходима паразитная шестерня, чтобы обеспечить соответствие направления вращения рулевого колеса 8 направлению поворота управляемого колеса 4 и всего транспортного средства. На ободе колеса 4 равномерно по окружности установлено несколько тел качения 10, 11, ось вращения каждого из которых расположена в плоскости перпендикулярной оси вращения ступицы 5 ортогонально радиусу колеса 4. Беговая дорожка колеса 4 образована наиболее удаленными от оси вращения ступицы участками беговых дорожек тел качения 10 и 11. Рулевой привод может быть снабжен гироскопической системой корректировки направления движения (не показана), связанной с ведущими колесами 3. Тормозная система шасси может быть снабжена тормозом, установленным на управляемом колесе и выполненным в виде конуса 12, размещенного в пространстве между телами качения 10, 11, с возможностью перемещения вдоль оси ступицы 5 и фрикционного взаимодействия с телами качания 10, 11. Привод тормоза может осуществляться непосредственно от тормозной педали 13, а может через какой-либо усилитель. Тормозной конус может быть установлен на шлицах оси 7 вращения ступицы 5, а ось должна быть закреплена неподвижно. Тела качения 10 и 11 могут быть разного диаметра, при этом большие тела 11 устанавливаются на одинаковом расстоянии друг от друга. Минимальное число тел качения большего диаметра три. Сами тела качения могут быть пневматическими роликами или покрыты материалами, хорошо поглощающими удары со стороны дорожного плотна, например, эластичной резиной или пластмассой. Для лучшей амортизации оси вращения тел качения могут быть подпружинены, например, с помощью упругих спиц 14. Беговая дорожка 15 тел качения может иметь рисунок протектора, а в зимних условиях снабжена шипами.
Работает транспортное средство следующим образом. Ведущие мотор-колеса 3 создают тяговое усилие и транспортное средство перемещается, опираясь на задние колеса и на одно или два, в зависимости от положения рулевого колеса, тела качения управляемого колеса, если оно одно.
В транспортном средстве, снабженном гироскопической системой корректировки направления движения любое несанкционированное водителем отклонение улавливается датчиком гироскопа и на ведущие колеса подается управляющий сигнал, воздействующий в простейшем случае на реостат электропривода и ускоряющий или замедляющий вращение мотор-колеса отстающего или опережающего борта, возвращая транспортное средство на первоначальную траекторию движения. При повороте водителем рулевого колеса 8 на небольших скоростях гироскопическая система отключается полностью. Вращение рулевого вала передается через зубчатую передачу 9 на ступицу 5 и обод 6 управляемого колеса 4. Колесо 4 поворачивается в плоскости перпендикулярной оси 7 ступицы вокруг нее. При этом происходит переход опирания передней части транспортного средства с одного тела качения управляемого колеса на другое и изменение направления движения. На малых скоростях угол поворота рулевого колеса 8 не ограничен и транспортное средство может осуществлять движение с минимальным радиусом поворота, практически на месте, т.к. при этом возможно использование вращения ведущих мотор-колес в разные стороны, что особенно удобно при управлении их приводом с помощью джостика. На повышенных скоростях движения угол поворота контролируется следящей системой гироскопа, связанной с акселерометром. При этом с помощью следящий системы при обеспечении безопасности движения, т. е. когда скорость и угол поворота соответствует допустимым, изменение направления движения транспортного средства осуществляется не только вращением колеса 4 вокруг оси ступицы 5, но и регулированием скорости вращения мотор-колес, которое также удобнее производить джостиком. В случае повышения критических значений скорости и угла поворота система сигнализирует водителю и автоматически снижает скорость движения транспортного средства.
Снабжение транспортного средства задними ведущими мотор-колесами и использование передних управляемых колес с телами качения, оси вращения которых установлены в плоскости перпендикулярной оси вращения ступицы, расположенной вдоль транспортного средства, позволяет значительно повысить маневренность и облегчить управление транспортным средством.
Дополнительное удобство создается использованием гироскопической системы и системы управления с помощью джостиков, которые легко сочетаются с электрической силовой установкой и электро мотор-колесами. Новая конструкция управляемых колес позволяет значительно снизить сопротивление этих колес повороту и упростить конструкцию рулевого привода. При этом возможно регулирование устойчивости и проходимости транспортного средства за счет перехода с движения на одном теле качения на движение на двух телах качения, а в случае крайней необходимости, например, в заболоченной местности, даже на трех телах качения после снижения давления в пневмороликах, и увеличения таким образом опорной поверхности управляемого колеса. Задние колеса благодаря большому диаметру так же имеют достаточную поверхность опирания и маленькое удельное давление на грунт.
Все это позволяет расширить область использования изобретения, включив в нее, например, обслуживание газонов, лужаек для игры в гольф и других спортивных площадок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 1997 |
|
RU2134564C1 |
| МОТОР-КОЛЕСО | 1990 |
|
RU2035115C1 |
| МАЛОГАБАРИТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2129503C1 |
| ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2290328C1 |
| СКЛАДНОЙ МОТОЦИКЛ | 1998 |
|
RU2141908C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (ВАРИАНТЫ) | 2007 |
|
RU2340994C1 |
| МОТОР-КОЛЕСО | 1991 |
|
RU2038985C1 |
| МОТОР-КОЛЕСО | 1991 |
|
RU2038984C1 |
| ИМПУЛЬСНО-ИНЕРЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285997C1 |
| МОТОР-КОЛЕСО | 1990 |
|
RU2035114C1 |
Изобретение относится к области транспорта и может быть использовано в качестве экологически чистого транспортного средства с электроприводом для обслуживания городского хозяйства, а так же территорий с травяным газоном, например, скверов и спортивных площадок. Изобретение обладает высокой маневренностью и легкостью управления. Транспортное средство содержит кузов, электрическую силовую установку и шасси. Задние мотор-колеса являются ведущими, а передние - управляемыми. Ось вращения ступицы каждого управляемого колеса установлена в неподвижных относительно кузова опорах вдоль транспортного средства с возможностью поворота обода со ступицей вокруг ее оси вращения от рулевого привода. На ободе каждого управляемого колеса равномерного окружности установлено несколько тел качения. Ось вращения каждого из тел качения расположена в полости перпендикулярной оси вращения ступицы ортогонально радиусу колеса, беговая дорожка которого образована наиболее удаленными от оси вращения ступицы участками беговых дорожек тел качения. Транспортное средство может быть снабжено гироскопической системой корректировки направления движения, связанной с ведущими колесами. 4 з.п. ф-лы, 3 ил.
| DE, заявка N 3244922, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| DE, патент N 1298009 | |||
| кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
