Изобретение относится к области машиностроения, в частности к навесному оборудованию мобильных робототехнических комплексов поиска и обезвреживания взрывоопасных предметов и может быть использовано в качестве подвески навесного оборудования специализированной землеройной техники, например валкователей торфа.
Известна подвеска навесного оборудования (патент ФРГ N 2330143, класс МКИ F 41 H 11/16, опубликован 09.01.75 г.), представляющая собой установленный на транспортном средстве рычажно-шарнирный механизм, на котором смонтировано исполнительное навесное устройство. Подвеска не имеет устройств копирования рельефа грунта. Это затрудняет управление, поскольку оператору приходится следить не только за направлением движения транспортного средства, но также за обеспечением необходимого для функционирования навесного устройства зазора между ним и грунтом.
Наиболее близким по технической сущности является выбранный за прототип (авторское свидетельство СССР N 151641, класс МКИ E 02 F 3/815, опубликованное 18.05.63 г.) навесной бульдозер-погрузчик, содержащий два продольных шарнирно соединенных с транспортным средством и с возможностью свободного перемещения соединенных каждый со своим приводом подъемных рычага, к передней части которых шарнирно присоединена оснащенная приводами поворота поперечная рама, под которой установлены лыжи, шарнирно передними концами соединенные с рамой поводками, и упоры ограничения самопроизвольного перемещения средней части каждой лыжи относительно рамы.
Данное устройство имеет следующие недостатки, ограничивающие технологические возможности его применения в составе мобильных робототехнических комплексов поиска и обезвреживания взрывоопасных предметов: сложность конструкции и управления подвеской, связанные с наличием и необходимостью управления приводами поворота поперечной рамы для поддержания в заданных пределах углов дифферента навесного поискового оборудования, изменяющихся в результате поворота рычагов при отслеживании профиля грунта; большую массу составных частей подвески и возможность повреждения навесного поискового оборудования при его лобовом столкновении, например, со скрытым в траве камнем, связанные с жестким замыканием усилия столкновения непосредственно между навесным оборудованием и движущимся транспортным средством; высокую вероятность подрыва при поиске скрытых в грунте взрывоопасных предметов, связанную с тем, что в процессе движения транспортного средства отслеживание профиля грунта сопровождается созданием давления на грунт от веса и сил инерции всех подвижных частей подвески и установленного на ней навесного поискового оборудования.
Изобретение решает задачу расширения технологических возможностей устройства при работе в составе мобильных робототехнических комплексов поиска и обезвреживания взрывоопасных предметов.
Для решения этой задачи в подвеске навесного оборудования транспортного средства, содержащей два продольных шарнирно соединенных с транспортным средством и соединенных каждый со своим приводом подъемных рычага, к передней части которых присоединена поперечная рама, под которой установлены лыжи, передними концами соединенные с рамой, и упоры ограничения самопроизвольного перемещения каждой лыжи относительно рамы, под каждым подъемным рычагом установлен дополнительный продольный шарнирно соединенный с транспортным средством рычаг, каждый рычаг выполнен в виде телескопического амортизатора и снабжен датчиком столкновения с препятствием, передние концы каждого рычага шарнирно соединены каждый со своей скалкой, установленной в поперечной цилиндрической направляющей рамы, причем одна из скалок снабжена упорами ограничения ее осевого перемещения в направляющей, лыжи передними концами шарнирно соединены с рамой и снабжены датчиками отсчета углов их поворота в шарнирах и упорами ограничения самопроизвольного поворота в направлении поверхности грунта.
Устройство и принцип действия предложенной подвески поясняются чертежом, на котором изображена кинематическая схема подвески.
В состав подвески входят два установленных вдоль каждого борта транспортного средства 1 и соединенных каждый со своим приводом, например с электромеханизмом (не показан), ведущих подъемных рычага 2 и 3, под каждым из которых установлено по одному дополнительному ведомому рычагу 4 и 5. Рычаги 2, 3, 4 и 5 соединены с транспортным средством 1 цилиндрическими шарнирами 6. Каждый из рычагов 2, 3, 4 и 5 представляет собой телескопический амортизатор, состоящий из корпуса 7, в цилиндрических направляющих 8 которого установлена штанга 9, поджатая в осевом направлении пружиной 10. Каждый из рычагов 2, 3, 4 и 5 снабжен датчиком, например контактным выключателем (не показан), контакты которого размыкаются при сжатии до определенного предела пружины 10. Каждая штанга 9 при помощи цилиндрического шарнира 11 соединена со своей скалкой 12, каждая из которых установлена в своей цилиндрической направляющей 13 поперечной рамы 14, причем одна из скалок 12 снабжена упорами 15 ограничения ее осевого перемещения в направляющей 13. Под рамой 14 установлены лыжи 16, передние части которых соединены с рамой 14 при помощи шарниров 17. Лыжи 16 снабжены датчиками, например потенциометрами (не показаны), отсчета углов их поворота в шарнирах 17 и упорами 18 ограничения поворота лыж 16 в направлении поверхности грунта.
При поиске скрытых в грунте взрывоопасных предметов установка подвески в рабочее положение и поддержание необходимого зазора между грунтом и установленным на ней поисковым оборудованием осуществляются оператором-водителем или системой управления транспортного средства путем воздействия на приводы поворота ведущих рычагов 2 и 3. Выбор направления и величины углов поворота рычагов 2 и 3 осуществляется по показаниям датчиков текущих углов поворота лыж 16 в шарнирах 17, изменяющихся в зависимости от расстояния между рамой и поверхностью грунта. При этом в зависимости от начального положения, скорости и направления взаимного перемещения ведущих рычагов 2 и 3 возникают несколько случаев взаимодействия составных частей подвески. Наиболее простым является случай, когда оба рычага 2 и 3 параллельны друг другу и под действием приводов поворачиваются в одном направлении с одинаковыми скоростями. В этом случае рычаги 2, 3. 4 и 5 синхронно поворачиваются на один и тот же угол, а скалки 12 поворачиваются в направляющих 13. При этом рама и установленное на ней поисковое оборудование совершают плоскопараллельное движение. Во всех остальных случаях при повороте ведущих рычагов 2 и 3 ведомые рычаги 4 и 5 поворачиваются на угол, несколько отличающийся от угла поворота рычагов 2 и 3. В процессе этого поворота происходят: поворот штанг 9 в направляющих 8, взаимный поворот штанг 9 и скалок 12 вокруг осей соединяющих их шарниров 11, поворот скалки 12, снабженной упорами 15, в направляющей 13 и поворот с одновременным поступательным перемещением остальных скалок 12 в своих направляющих 13. Кроме этого, из-за различий в углах поворотов рычагов происходит поступательное перемещение штанг 9 в направляющих 8, сопровождающееся незначительной деформацией пружин 10. При этом рама и установленное на ней поисковое оборудование совершают сложное пространственное движение, которое сопровождается изменениями высоты и углов (крена, дифферента и тангажа) их расположения относительно транспортного средства. Размеры и взаимное расположение составных частей подвески выбираются таким образом, чтобы при копировании профиля грунта: изменения углов крена, дифферента и тангажа не вызывали разрушения сочленений подвески; изменения углов дифферента и тангажа не вызывали нарушения условий функционирования поискового оборудования; величина сжатия пружин 10 была незначительной и не вызывала размыкания контактов выключателей амортизаторов. При столкновении поискового оборудования с препятствием происходят продольное перемещение одной или нескольких штанг 9 в направляющих 8, сжатие соответствующих пружин 10 и размыкание конечных выключателей, встроенных в эти рычаги. Размыкание выключателя происходит, если величина сжатия соответствующей пружины превысит расчетную, определяемую геометрическими параметрами подвески, величину ее сжатия от взаимного перемещения составных частей подвески при копировании профиля грунта, без столкновения поискового оборудования с препятствием. Информация о размыкании одного или нескольких выключателей является сигналом о необходимости остановки транспортного средства.
Использование данной конструкции позволяет расширить технологические возможности применения подвески навесного оборудования в составе робототехнических комплексов поиска и обезвреживания взрывоопасных предметов вследствие того, что установка ведомых рычагов взамен приводов поворота поперечной рамы позволяет упростить конструкцию и управление подвеской; отслеживание профиля грунта сопровождается созданием давления на грунт только от действия веса и сил инерции лыж подвески; наличие амортизаторов и встроенных в них выключателей позволяет предохранить поисковое оборудование от повреждения при его столкновении с препятствием и снизить массу составных частей подвески.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1997 |
|
RU2116608C1 |
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1999 |
|
RU2168146C2 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1997 |
|
RU2113978C1 |
| САМОХОДНОЕ ШАССИ ЧЕТЫРЕХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2494908C2 |
| УСТРОЙСТВО ОТБОРА ПРОБ ЖИДКОСТИ | 1998 |
|
RU2139513C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОБЕЗВРЕЖИВАНИЯ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 1993 |
|
RU2089826C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА СКРЫТЫХ В ГРУНТЕ ОБЪЕКТОВ | 1998 |
|
RU2135932C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
Изобретение относится к оборудованию мобильных робототехнических комплексов поиска и обезвреживания взрывоопасных предметов и может быть использовано для специализированной землеройной техники, например валкователей торфа. В состав подвески входят два продольных шарнирно соединенных с транспортным средством и соединенных каждый со своим приводом подъемных рычага, под каждым из которых установлен дополнительный продольный шарнирно соединенный с транспортным средством рычаг, каждый рычаг выполнен в виде телескопического амортизатора и снабжен датчиком столкновения с препятствием, передние концы каждого рычага шарнирно соединены каждый со своей скалкой, установленной в поперечной цилиндрической направляющей рамы, под которой установлены лыжи, передними концами шарнирно соединенные с рамой, причем одна из скалок снабжена упорами ограничения ее осевого перемещения в направляющей, а лыжи снабжены датчиками отчета углов их поворота в шарнирах и упорами ограничения самопроизвольного поворота в направлении поверхности грунта. Конструкция позволяет уменьшить давление на грунт составных частей подвески в процессе отслеживания профиля грунта и предотвратить разрушение навесного оборудования при его столкновении с препятствием. 1 ил.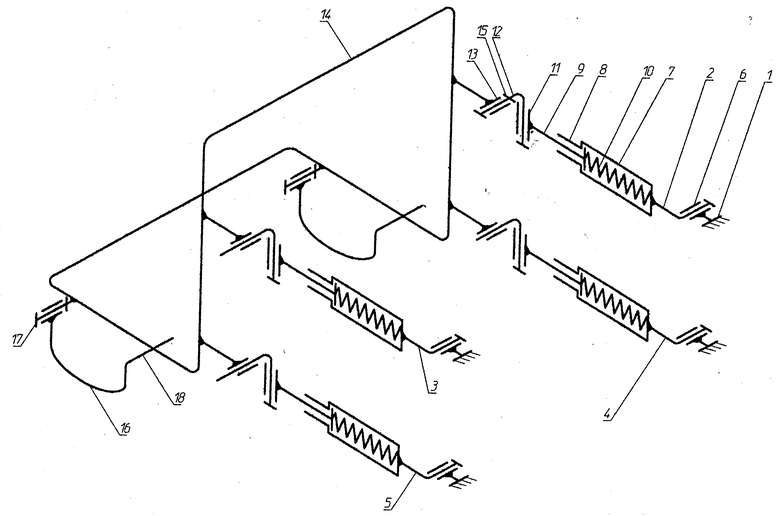
Подвеска навесного оборудования транспортного средства, содержащая два продольных шарнирно соединенных с транспортным средством и соединенных каждый со своим приводом подъемных рычага, к передней части которых присоединена поперечная рама, под которой установлены лыжи, передними концами соединенные с рамой, и упоры ограничения самопроизвольного перемещения каждой лыжи относительно рамы, отличающаяся тем, что под каждым подъемным рычагом установлен дополнительный продольный шарнирно соединенный с транспортным средством рычаг, каждый рычаг выполнен в виде телескопического амортизатора и снабжен датчиком столкновения с препятствием, передние концы каждого рычага шарнирно соединены каждый со своей скалкой, установленной в поперечной цилиндрической направляющей рамы, причем одна из скалок снабжена упорами ограничения ее осевого перемещения в направляющей, лыжи передними концами шарнирно соединены с рамой и снабжены датчиками отсчета углов их поворота в шарнирах и упорами ограничения самопроизвольного поворота в направлении поверхности грунта.
| SU, 151641A, 18.05.63 | |||
| FR, 2700501 A1, 22.07.94 | |||
| RU, 2022813 C1, 15.01.94 | |||
| RU, 2068058 C1, 20.10.96 | |||
| US, 3899036 A, 12.08.75 | |||
| DE, 3138590 A1, 14.04.83. |
