Изобретение относится к машиностроению, в частности к грузоподъемным механизмам мобильных робототехнических комплексов.
Известна установка для топографических съемок (патент США N 4.593.474, кл. НКИ 33-264, опубликованный 06.10.88), состоящая из автомобиля, на котором смонтировано выдвижное устройство подъема полезного груза. Установка не имеет устройств, позволяющих компактно разместить подъемник и полезную нагрузку в автомобиле в транспортном положении. Тем самым увеличиваются габариты установки по высоте.
Наиболее близким по технической сущности является выбранный за прототип (патент США N 4.913.458, кл. НКИ 280/6.1, опубликованный 03.04.90) грузоподъемный механизм, содержащий кривошипно-ползунный механизм и закрепленную на его шатуне подъемную стрелу, причем ось шарнира, соединяющего кривошип с неподвижной частью, расположена ближе к оголовку стрелы, чем ось шарнира, соединяющего шатун с кривошипом.
Недостатком этого механизма являются ограниченные технологические возможности, связанные с тем, что при определенном соотношении размеров составных частей механизма стрела в процессе своего подъема может пересекать ось шарнира, соединяющего кривошип с неподвижной частью. Это накладывает ограничения на выбор возможных вариантов конструктивного исполнения деталей механизма. Например, если длина стрелы больше расстояния между осями шарниров, соединяющих кривошип с неподвижной частью и шатун с ползуном, необходимо использование консольной заделки оси шарнира, соединяющего кривошип с неподвижной частью. Это приводит к увеличению нагрузок на детали и, при прочих равных условиях, требует увеличения массы механизма и тем самым ограничивает возможности его применения в составе мобильных робототехнических комплексов.
Изобретение решает задачу расширения технологических возможностей и уменьшения массы механизма.
Для решения этой задачи ось вращения шарнира, соединяющего шатун с кривошипом, расположена ближе к оголовку стрелы, чем ось шарнира, соединяющего кривошип с неподвижной частью.
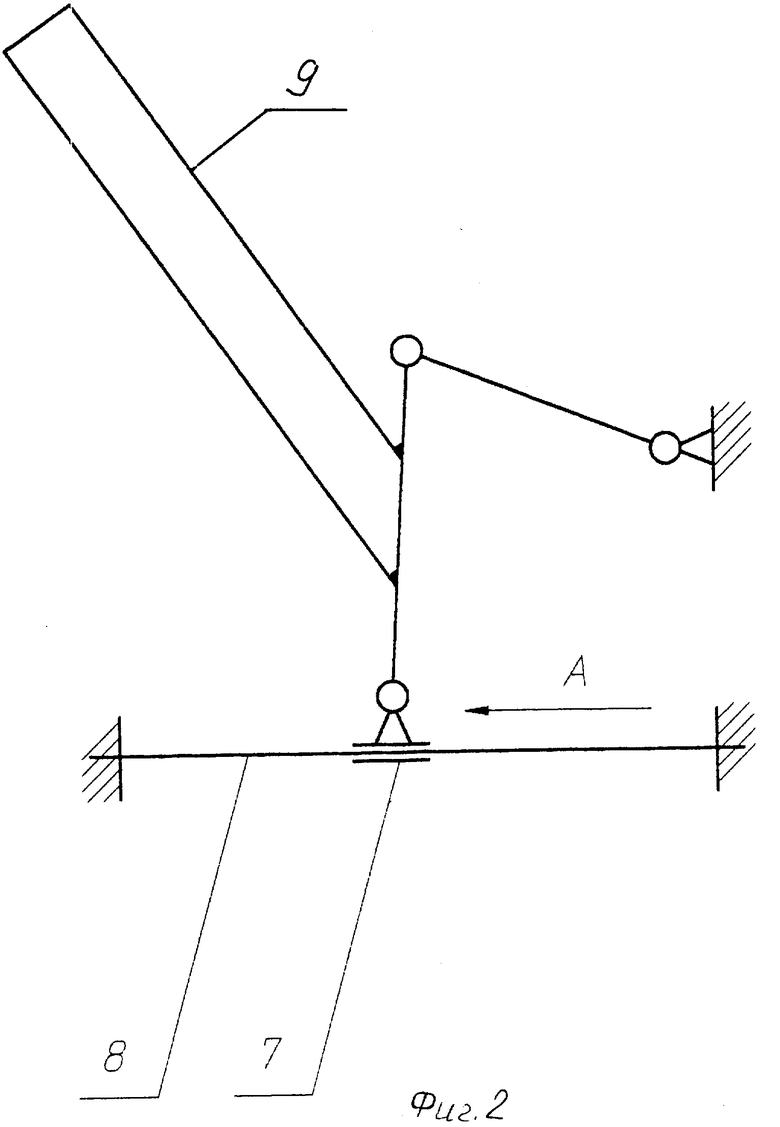
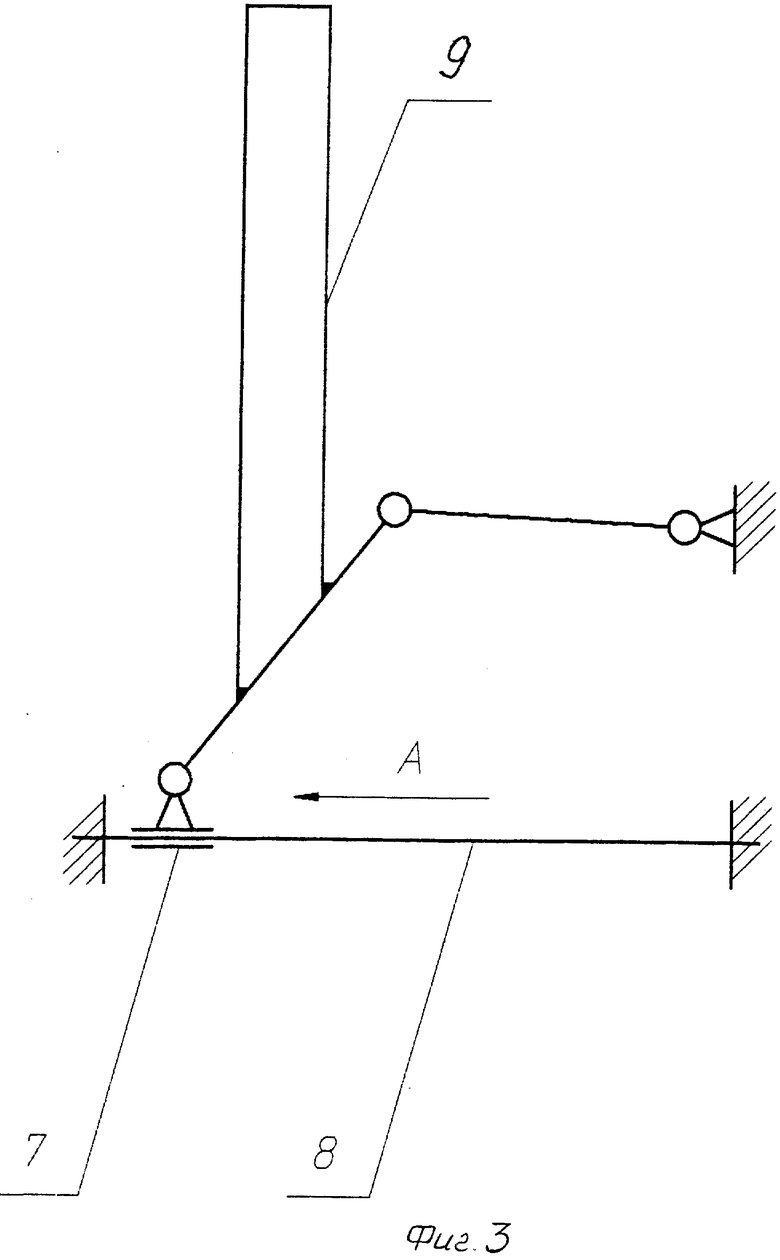
На фиг. 1 дана кинематическая схема, на которой механизм изображен в исходном положении; на фиг. 2 - кинематическая схема, на которой механизм изображен в промежуточном положении; на фиг. 3 - кинематическая схема, на которой механизм изображен в конечном положении.
В состав механизма входят стойка 1, с которой при помощи шарнира 2 соединен кривошип 3. С кривошипом 3 при помощи шарнира 4 соединен шатун 5, который при помощи шарнира 6 соединен с ползуном 7, установленным с возможностью возвратно-поступательного перемещения в направляющей 8. Звенья с 1 по 8 образуют кривошипно-ползунный механизм, на шатуне 5 которого закреплена подъемная стрела 9. Стрела 9 установлена таким образом, что ось шарнира 4 соединения шатуна 5 с кривошипом 3 расположена ближе к оголовку стрелы 9, чем ось шарнира 2 соединения кривошипа 3 со стойкой 1.
Устройство работает следующим образом.
При перемещении ползуна 7 под воздействием привода подъема стрелы (не показан) по направляющей 8 от исходного положения в направлении стрелки А шатун 5 и закрепленная на нем стрела 9 совершают плоскопараллельное движение, в процессе которого стрела 9 поднимается из исходного (горизонтального) положения в конечное (вертикальное) положение. При этом независимо от своей длины стрела 9 не пересекает ось шарнира 2 соединения кривошипа 3 с неподвижной частью 1 механизма.
Такая конструкция расширяет возможности выбора вариантов конструктивного исполнения механизма, в частности, устраняет необходимость применения консольной заделки оси шарнира соединения кривошипа с неподвижной частью механизма, что позволяет уменьшить массу и расширить возможности применения механизма в составе мобильных робототехнических комплексов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСКА НАВЕСНОГО ОБОРУДОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2118787C1 |
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1997 |
|
RU2116608C1 |
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1999 |
|
RU2168146C2 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| СПОСОБ МОНТАЖА БАШЕННЫХ И МАЧТОВЫХ СООРУЖЕНИЙ С ПОМОЩЬЮ КРИВОШИПНОГО МЕХАНИЗМА | 1995 |
|
RU2091549C1 |
| Башенный кран | 1988 |
|
SU1595786A1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| ГИДРОМАНИПУЛЯТОР МОБИЛЬНОГО РОБОТА | 2022 |
|
RU2773065C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| САМОХОДНОЕ ШАССИ ЧЕТЫРЕХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2494908C2 |
Грузоподъемный механизм может быть использован в мобильных робототехнических комплексах. В его состав входит кривошипно-ползунный механизм, на шатуне которого закреплена подъемная стрела. Стрела установлена таким образом, что ось шарнира соединения шатуна с кривошипом расположена ближе к оголовку стрелы, чем ось шарнира соединения кривошипа со стойкой кривошипно-ползунного механизма. Предложенная конструкция расширяет возможности выбора вариантов конструктивного исполнения механизма, в частности, устраняет необходимость применения консольной заделки оси шарнира соединения кривошипа со стойкой. Это позволяет уменьшить массу механизма и расширить возможности его применения. 3 ил.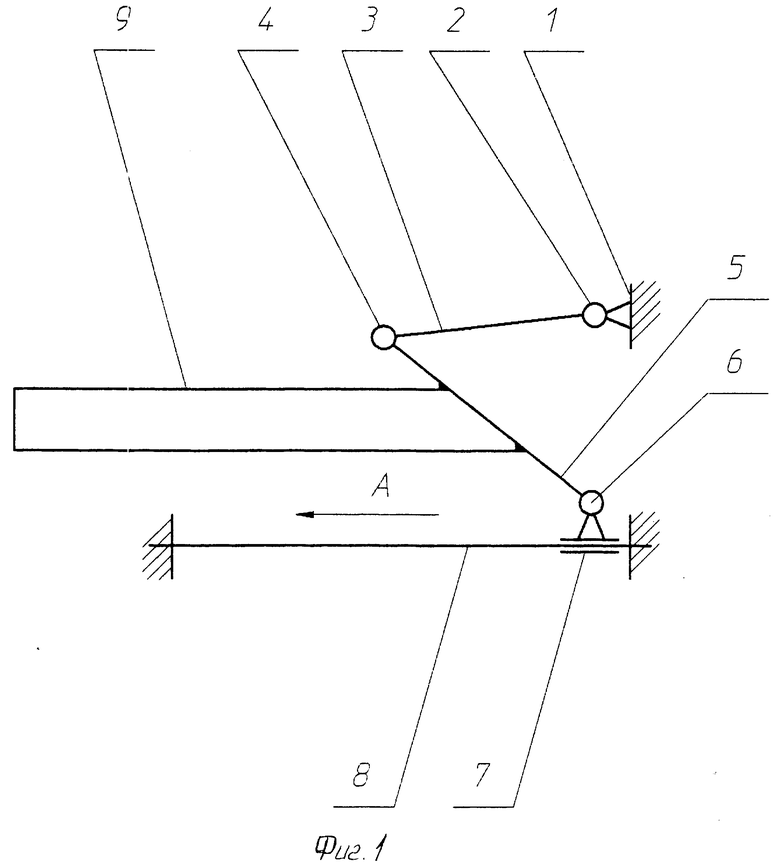
Грузоподъемный механизм, содержащий кривошипно-ползунный механизм и закрепленную на его шатуне подъемную стрелу, отличающийся тем, что ось шарнира соединения шатуна с кривошипом расположена ближе к оголовку стрелы, чем ось шарнира соединения кривошипа с неподвижной частью.
| SU 4913458 A, 03.04.96 SU 1602732 A1, 30.10.90 SU 1268399 A1, 07.11.86 RU 94025321 A1, 10.05.96 SU 782993A, 30.11.80 SU 1715576 A1, 29.02.92 US 459 3474 A, 10.06.96 DE 2811263 A1, 28.09.78 |
