Ґ77///////)(///////7Л fe/
Изобретение относится к робототехнике, а именно к роботам и манипуляторам, работающим в экстремальных условиях (дистанционно управляемые роботы и манипуляторы).
Цель изобретения - расширение области применения.
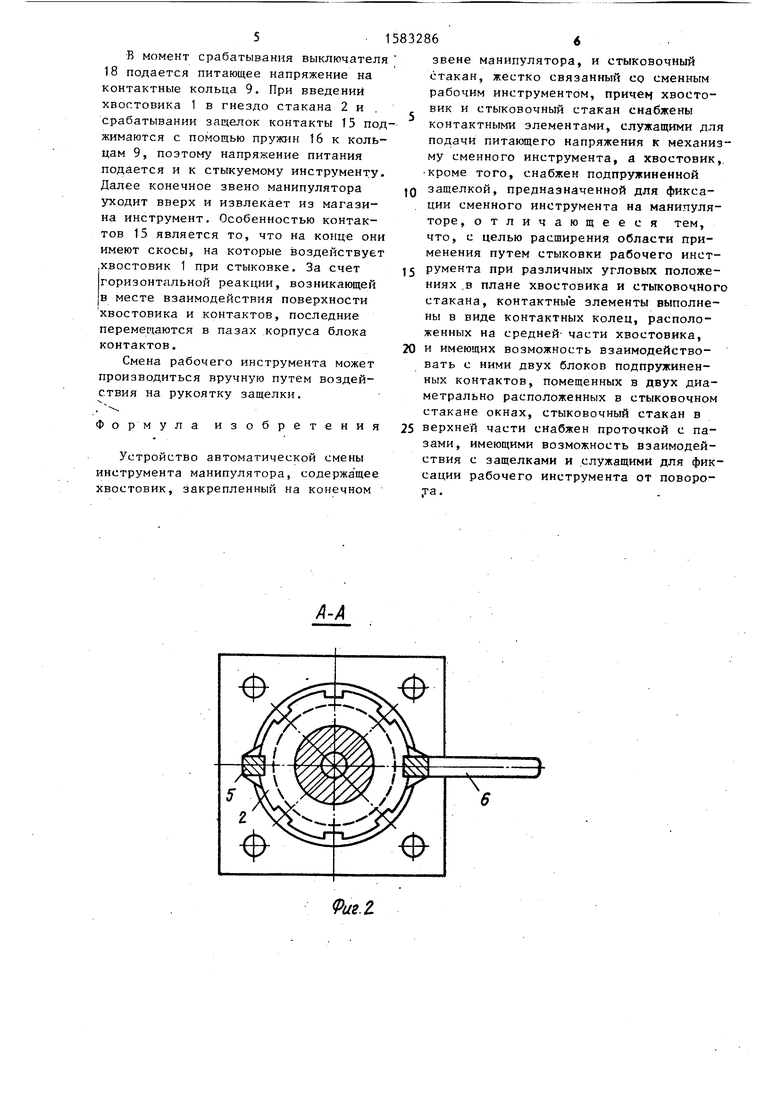
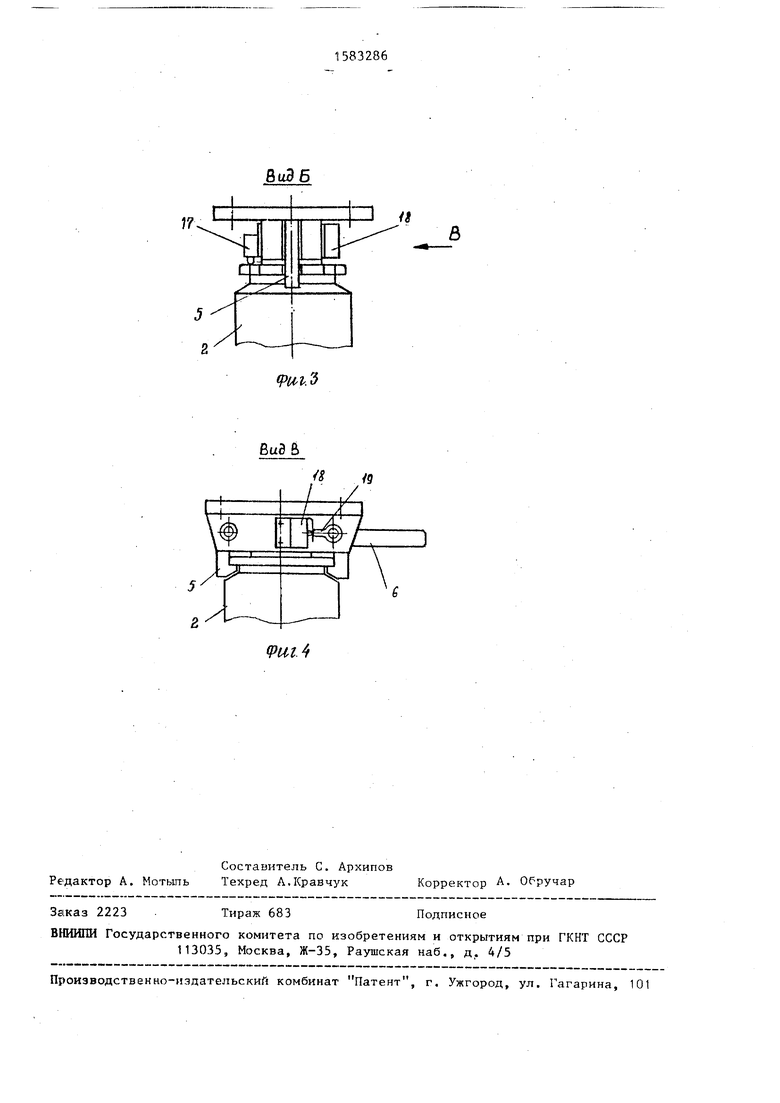
На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. А - вид В на фиг.3.
Устройство состоит из двух основных узлов: хвостовика 1 и стыковочного стакана 2, Хвостовик 1 закреплен на конечном звене манипулятора, а стакан 2 жестко связан с рабочим инструментом. В пазу, выполненном в корпусе хвостовика 1, на осях 3
и 4 установлены две защелки 5 и 6, С помощью которых осуществляется захват стыковочного стакана. Хвостовик защелки 5 опирается на толкатель 7, подпружиненный пружиной 8, а защелка 6 опирается своим хвостовиком на хвостовик защелки 5 и имеет удлиненную рукоятку, служащую для раскрытия защелок. Подпружиненный толкатель 7 служит для поджатия защелок 5 и 6 к поверхностям верхнего фланца стакана. В средней части хвостовика расположены контактные кольца 9, к которым подводится напряжение питания механизмов сменного инструмента манипулятора. В нижней части хвостовик выполнен в виде ко- -нуса, в котором расположен толкатель 10 и пружина 11.
В верхней части корпуса стыковочного стакана 2 выполнена проточка с пазами для защелок 5 и 6. Пазы служат для фиксации рабочего инструмента от поворота.
В средней части корпуса стыковочного стакана 2 находятся два диаметрально расположеннЕ 1Х окна, в каждом из которых закреплен блок контактов 12, 13.
Каждый из блоков контактов состоит из корпуса 14, выполненного из диэлектрика, и группы контактов 15,, которые с помощью пружин 16 поджимаются к контактным кольцам 9. Контакты 15 соединены.кабелем с исполнителными механизмами рабочего инструмента.
На боковых поверхностях корпуса узла с двух сторон установлены два блока конечных выключателей 17 и 18
0
(фиг. 3). Выключатель 17 срабатывает при стыковке устройства, когда зубья защелок 5 и 6 попадают в кольцевую проточку в верхней части стакана. Выключатель 18 срабатывает в момент, когда защелка попадает в пазы верхнего фланца стакана. На оси 3 крепится кулачок 19 (фиг. 4), который воздействует на выключатель 17 в момент закрытия защелок.
Устройство работает следующим образом.
Рабочий инструмент (захватные уст- 5 ройства и др.), предназначенный для автоматической смены, помещается в специальное магазинное устройство, имеющее соответствующие гнезда для его размещения. На каждом рабочем инструменте закреплен стакан 2 описываемого устройства. Хвостовик 1 устройства закрепляется на конечном звене манипулятора. На фиг. 1-4 показано устройство в состыкованном положении. Для замены инструмента рабочий орган манипулятора подводится к магазинному устройству и опускается в соответствующее гнездо. При этом на рукоятку защелки 6 воздействует упор, жестко закрепленный в магазинном устройстве. Защелки 5 и 6 раскрываются, толкатель 10 под действием пружины 11 отжимает стыковочный стакан 2 с инструментом от хвосточика 1. Конечное звено манипулятора с хвостовиком 1 уходит вверх, а сменный инструмент остается в гнезде магазина.
0
0
5
0
5
0
5
Далее конечное звено манипулятора с хвостовиком 1 подводится к гнезду магазинного устройства с рабочим инструментом, который необходимо присоединить к манипулятору. Хвостовик 1 вводится в гнездо стыковочного стакана до момента, когда защелки 5 и 6 попадут в кольцевую проточку стакана 2, при этом пружины 8 и 11 сжимаются. Момент, когда защелки попадут в кольцевую проточку, фиксируется конечным выключателем 17. После этого подается команда на поворот (ротацию) конечного звена манипулятора. Защелки 5 и 6 начинают скользить по боковым поверхностям стакана 2 и попадают в пазы, которые служат для фиксации рабочего инструмента от поворота. При этом кулачок 19 воздействует на конечный выключатель 18, вызывая его срабатывание.
51
В момент срабатывания выключателя 18 подается питающее напряжение на контактные кольца 9. При введении хвостовика 1 в гнездо стакана 2 и срабатывании защелок контакты 15 поджимаются с помощью пружин 16 к кольцам 9, поэтому напряжение питания подается и к стыкуемому инструменту. Далее конечное звено манипулятора уходит вверх и извлекает из магазина инструмент. Особенностью контактов 15 является то, что на конце они имеют скосы, на которые воздействует .хвостовик 1 при стыковке. За счет горизонтальной реакции, возникающей в месте взаимодействия поверхности хвостовика и контактов, последние перемеряются в пазах корпуса блока контактов.
Смена рабочего инструмента может производиться вручную путем воздействия на рукоятку защелки. . Формула изобретения
Устройство автоматической смены инструмента манипулятора, содержащее хвостовик, закрепленный на конечном
832866
звене манипулятора, и стыковочный стакан, жестко связанный ер сменным рабочим инструментом, причем хвостовик и стыковочный стакан снабжены контактными элементами, служащими для подачи питающего напряжения к механизму сменного инструмента, а хвостовик, кроме того, снабжен подпружиненной
JQ защелкой, предназначенной для фиксации сменного инструмента на манипуляторе, отличающееся тем, что, с целью расширения области применения путем стыковки рабочего инст15 румента при различных угловых положениях в плане хвостовика и стыковочного стакана, контактные элементы выполнены в виде контактных колец, расположенных на средней части хвостовика,
20 и имеющих возможность взаимодействовать с ними двух блоков подпружиненных контактов, помещенных в двух диаметрально расположенных в стыковочном стакане окнах, стыковочный стакан в
25 верхней части снабжен проточкой с пазами, имеющими возможность взаимодействия с защелками и служащими для фиксации рабочего инструмента от поворота.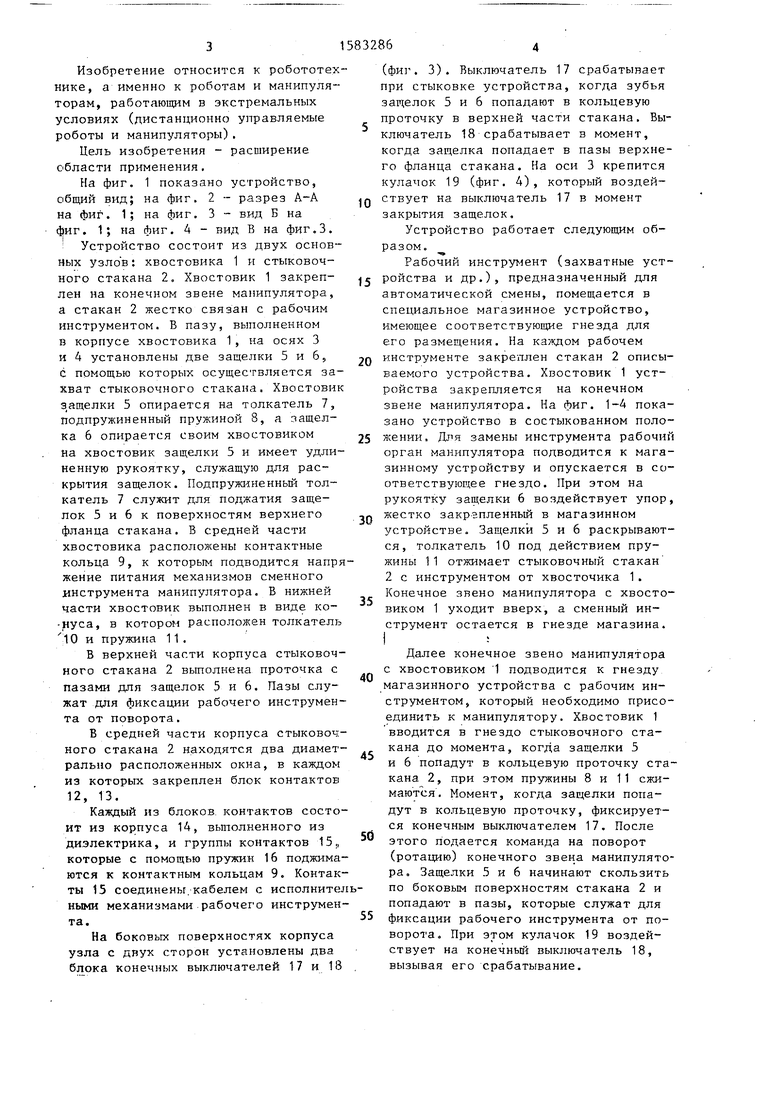
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| Устройство для автоматической смены инструментальных оправок | 1985 |
|
SU1273242A1 |
| Устройство для автоматической смены инструментальных оправок | 1985 |
|
SU1283101A1 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| ИНСТРУМЕНТ ДЛЯ ЗАЖИМА, ПРЕИМУЩЕСТВЕННО ДЛЯ РАБОТЫ В ТРУДНОДОСТУПНЫХ МЕСТАХ | 2003 |
|
RU2243082C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
| Стыковочное устройство | 1985 |
|
SU1301697A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| ПАССИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583992C2 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
Изобретение относится к робототехнике. Цель изобретения - расширение области применения. Устройство состоит из двух основных узлов хвостовика 1, закрепленного на конечном звене манипулятора, и стакана 2, жестко связанного с рабочим инструментом. Хвостовик снабжен двумя подпружиненными защелками 5 и 6, фиксирующими сменный рабочий инструмент на манипуляторе. В средней части хвостовика расположены контактные кольца 9, установленные с возможностью взаимодействия с блоками контактов 12 и 13 и предназначенные для подачи напряжения питания на механизм сменного инструмента. Смена рабочего инструмента может производиться автоматически или вручную путем воздействия на рукоятку защелки 6. 4 ил.
Фиг. 2.
8иЭб
ФШ.Ъ
Фиг 4
| Патент США № 4621854, кл | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
