Изобретение относится к области радиотехники и может быть использовано в когерентно-импульсной РЛС или в каналах связи для измерения отношения сигнал/шум (сигнал/помеха).
Известно устройство измерения отношения сигнал/шум, которое обеспечивает разделение входной смеси на шумовую и сигнальную составляющие с помощью линий задержки и сумматоров /1/. Недостатком данного устройства является сложность в настройке, низкая стабильность параметров и неэффективность работы при изменении частоты входного сигнала, так как время задержки должно быть кратным целому числу периодов входного колебания.
Из известных технических решений наиболее близким по технической сущности к заявляемому объекту является устройство, в котором измерение отношения сигнал/шум q основывается на анализе зависимости среднего значения результирующей фазы гармонического сигнала от величины q /2/. Оно включает в свой состав последовательно соединенные антенну, приемник, 1-й ограничитель, синхронно-фазовый детектор, 2-й ограничитель, усреднитель, блок памяти и индикатор. В состав устройства входят также блоки и элементы, обеспечивающие обработку фазоманипулированных сигналов.
В данном устройстве сигнал и шум (помеха) принимаются антенной и приемником, а на выходе синхронно-фазового детектора формируется сигнал результирующей фазы смеси сигнала и шума. После усреднения через блок памяти сигнал поступает на индикатор, который оцифрован в соответствии с зависимостью значений результирующей фазы от отношения сигнал/шум для гармонического сигнала.
К недостаткам известного устройства следует отнести то, что оно неприменимо в составе импульсной РЛС, и, кроме того, используемая зависимость результирующей фазы от отношения сигнал/шум устанавливается для определенного типа помехи и не учитывает возможных изменений параметров помеховых сигналов и шума, тем самым снижается точность измерения.
Задачей настоящего изобретения является построение измерителя отношения сигнал/шум (или сигнал/помеха), имеющего более высокие точностные характеристики при различных типах помех и который можно использовать в составе когерентно-импульсной РЛС.
Задача решается путем обнаружения полезного сигнала, выделения фазовых флуктуаций сигналов, обусловленных влиянием помех и их анализа на основе полученной зависимости дисперсии фазовых флуктуаций от отношения сигнал/шум.
Проведенный методом моделирования анализ точностных характеристик устройства показал, что относительная ошибка измерения не превышает 5%. Данное устройство может быть использовано как в системах связи, так и в когерентно-импульсных РЛС.
Структурная схема предложенного устройства приведена на фиг. 1. Схема генератора опорных функций фазы представлена на фиг. 2. Работа устройства поясняется рисунками, изображенными на фиг. 3, 4, 5 и 6.
Поставленная задача решается следующим образом.
В известное устройство, содержащее последовательно соединенные антенну 1, приемник 2, блок памяти 4, индикатор 7, дополнительно введены измеритель фазы 3, вход которого соединен с выходом приемника, а выход - со входом блока памяти, блок коррелятора 5, первый вход которого соединен с выходом блока памяти 4, пороговый блок 6, вход которого соединен с выходом блока коррелятора, а выход - со входом блока индикатора 7, последовательно соединенные счетчик 10, схема "И" 9 и генератор опорных функций 8, выход которого соединен со вторым входом блока коррелятора, а второй вход схемы "И" соединен с выходом порогового блока; последовательно соединенные блок вычитания 11, блок вычисления дисперсии фазы 12, блок вычисления отношения сигнал/шум q 13, причем первый вход блока вычитания соединен с выходом блока памяти, второй вход - с выходом генератора опорных функций, а выход блока вычисления q 13 - со вторым входом индикатора.
Генератор опорных функций фазы 8 (см. фиг. 2) выполнен в виде последовательно соединенных счетчика-регистра значений второй производной фазы  14, счетчика-регистра значений первой производной фазы
14, счетчика-регистра значений первой производной фазы  15, первого блока записи 16, первого умножителя 17, первого накапливающего сумматора 18, а также последовательно соединенных второго блока записи 19, вход которого соединен с выходом счетчика-регистра 14 второго умножителя 20, второго накапливающего сумматора 21, выход которого соединен со вторым входом первого накапливающего сумматора.
15, первого блока записи 16, первого умножителя 17, первого накапливающего сумматора 18, а также последовательно соединенных второго блока записи 19, вход которого соединен с выходом счетчика-регистра 14 второго умножителя 20, второго накапливающего сумматора 21, выход которого соединен со вторым входом первого накапливающего сумматора.
Устройство работает следующим образом. Входной сигнал когерентно-импульсной РЛС представляет собой смесь полезного сигнала и шума (помехи):
Входной сигнал принимается антенной 1, обрабатывается в приемнике 2 и поступает на измеритель фазы 3.
Измерение значений фазы ϕi осуществляется в блоке 3. Причем для обеспечения когерентности обработки необходимо отсчет фазы производить относительно фазы зондирующего сигнала или сигнала когерентного гетеродина x(t). Накопленные за n тактов работы РЛС значения ϕi хранятся в блоке памяти 4.
Для обнаружения полезного сигнала производится корреляционная обработка функции фазы ϕi путем сравнения ее с набором из N эталонных (опорных) функций фазы ϕonij, формируемых в генераторе 8. Вид функций фазы показан на фиг. 3. Функция фазы отраженного сигнала ϕi имеет флуктуационную составляющую δϕi, которая определяется воздействием помехи. Здесь i - номер такта зондирования, i= 1,2,...n; j - номер опорной функции с параметрами  и
и  , j=1,2,...N.
, j=1,2,...N.
Сравнение производится путем вычисления N корреляционных функций:
Из N значений ψj выбирается максимальное ψмакс и сравнивается с порогом. При ψмакс≥ ψпор принимается решение о наличии сигнала цели (см. фиг. 4).
Далее необходимо получить значения фазовых флуктуаций δϕi= ϕi-ϕci, где ϕci - составляющие функции фазы, обусловленные полезным сигналом. Они формируются в генераторе, как значения той jм опорной функции ϕoni , при сравнении с которой было получено максимальное значение корреляционной функции ψмакс, т.е. ϕonijm. Код номера jм появится на выходе схемы "И" (блок 9), при наличии импульса превышения порога. Значения j фиксируются на счетчике 10 путем просчета импульсов j=1,2,...N. По значению jм в генераторе 8 будут формироваться значения функции фазы ϕci= ϕonijm.
Далее в блоке вычитания 11 вычисляются значения фазовых флуктуаций
δϕi= ϕi-ϕci. (3)
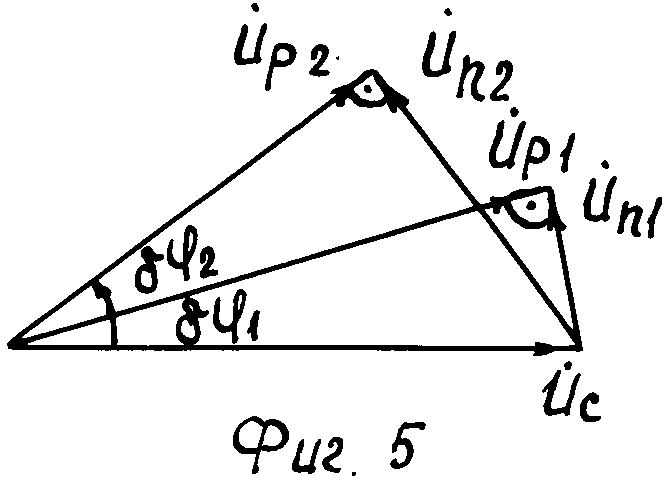
Они определяются отношением сигнал/шум q. Чем больше q, тем меньше флуктуации фазы. Из рисунка на фиг. 5 видно, что максимальное смещение вектора сигнала цели  по фазе δϕмакс будет в том случае, если помеховый вектор
по фазе δϕмакс будет в том случае, если помеховый вектор  и результирующий вектор
и результирующий вектор  составляют угол в 90o. Тогда
составляют угол в 90o. Тогда
Под отношением сигнал/шум чаще понимают величину  ,
,
где σп = - среднеквадратическое отклонение (СКО) амплитуды помехового сигнала.
Тогда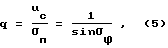
где σϕ - СКО фазовых флуктуаций.
В связи с этим в блоке 12 производится вычисление дисперсии фазовых флуктуаций в соответствии с выражением для несмещенной оценки:
В блоке 13 в соответствии с выражением (5) вычисляется значение отношения сигнал/шум, которое далее выдается на индикатор 7. Опорные функции фазы формируются в генераторе 8. На фиг. 2 представлена схема такого генератора.
Значения опорных функций (в кодовых единицах, соответствующих цене кодовой единицы в измерителе фазы) можно записать как
Параметры опорных функций  записываются последовательно в счетчики-регистры 14 и 15. При этом значения
записываются последовательно в счетчики-регистры 14 и 15. При этом значения  = 1,2,...m изменяются по счетным импульсам последовательности j=1,2,...N, а значения
= 1,2,...m изменяются по счетным импульсам последовательности j=1,2,...N, а значения  изменяются по импульсам переполнения счетчика-регистра 14:
изменяются по импульсам переполнения счетчика-регистра 14:  = 1,2,...l, причем m•l=N.
= 1,2,...l, причем m•l=N.
Для каждой пары величин  формируются n значений опорной функции (7).
формируются n значений опорной функции (7).
Выражение (7) можно переписать в виде:
Чтобы реализовать вычисление значений опорных функций в соответствии с (8), используются блоки записи 16 и 19, блоки умножителей на константу 17 и 20 и накапливающие сумматоры 18 и 21.
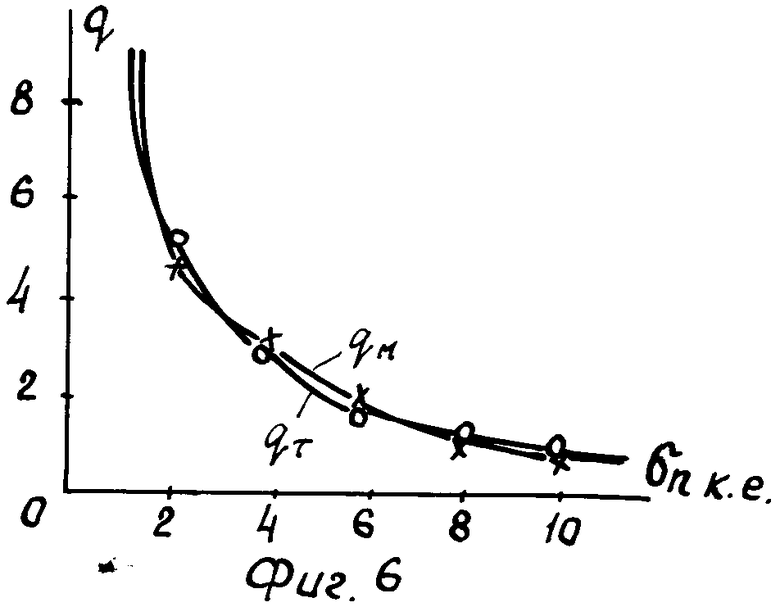
Возможность использования выражения (5) для оценки значения сигнал/шум проведена путем моделирования на ЭВМ. Амплитуда помехи принималась распределенной по нормальному закону, а фаза - по равномерному в пределах 0-2π. Результаты теоретического расчета qт и моделирования qм приведены на рисунке фиг. 6. Расхождение не превышает 5%.
Управление работой устройства производится с помощью генератора управляющих импульсов (на схеме не показан). Генератор должен формировать импульсы с тактовой частотой  работы РЛС для запуска измерителя фазы, с задержкой относительно зондирующих сигналов, соответствующей стробу дальности обнаружения целей.
работы РЛС для запуска измерителя фазы, с задержкой относительно зондирующих сигналов, соответствующей стробу дальности обнаружения целей.
Кроме того, необходимо формировать пачку из N управляющих импульсов с частотой следования F1, используемых как импульсы j=1,2,...N и N пачек из n управляющих импульсов с частотой F2=nF1, используемых как импульсы i=1,2,... n.
При технической реализации блоки 1, 2 и 3 выполняются как типовые элементы импульсной РЛС. Приемник содержит усилители высокой частоты, первый и второй преобразователи частоты и усилитель промежуточной частоты. Измеритель фазы состоит из преобразователя фазового сдвига между сигналами y(t) и x(t) во временной интервал, который заполняется счетными импульсами /5/. Блок памяти 4 представляет собой регистр хранения на n двоичных чисел (по числу накапливаемых значений фазовых замеров) /3/.
Коррелятор 5 включает в свой состав в соответствии с выражением (2) последовательно соединенные блок вычитания кодов ϕi-ϕoпij, два параллельно включенных квадратурных канала, блок сумматора, блок извлечения квадратного корня с нормировкой, блок определения максимального значения корреляционной функции ψмакс.
Каждый квадратурный канал содержит блок вычисления косинуса (синуса), накапливающий сумматор и квадратор. Коррелятор 5 и пороговый блок 6 могут быть выполнены по аналогии с /4/, только в цифровом виде. Элементы генератора опорных функций - счетчики-регистры, схемы перезаписи кодов, умножители на константу и накапливающие сумматоры являются известными и достаточно подробно описаны в справочнике по интегральным микросхемам /3/. В качестве блока вычитания 11 используется сумматор, на второй вход которого значения ϕoпijм поступают в дополнительном коде /3/.
Блок 12 в соответствии с выражением (6) вычисляет дисперсию σ
Блок 13 обеспечивает вычисление отношения сигнал/шум q в соответствии с выражением (5). Он выполняется в виде дешифратора или ППЗУ /3/.
Блок 7 выполнен в виде цифрового индикатора /3/. Кроме информации о значениях q он фиксирует также о наличии импульса обнаружения полезного сигнала.
Источники информации
1. Авторское свидетельство СССР N 808996. Устройство для измерения отношения сигнал/шум. Кл. МКИ 4 G 01 R 29/26, 1981.
2. Авторское свидетельство СССР N 1337834. Измеритель отношения гармонического и фазоманипулированного сигналов к шуму в каналах связи. Кл. МКИ 4 G 01 R 29/26, 1987.
3. Справочник по интегральным микросхемам. Под ред. В.В.Тарабрина. - М.: Энергия, 1981, УДК 621.3.049.77 (03).
4. Пестряков В. Б. Фазовые радиотехнические системы. - М.: Сов. радио, 1968. УДК 621.396.983.
5. Гитис Э.И. Преобразователи информации для ЭЦВУ. - М.: Энергия, 1975. УДК 681.3.05.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ И РАЗНОСТИ ЧАСТОТ СИГНАЛОВ | 1992 |
|
RU2025738C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ ПРИ ИСПОЛЬЗОВАНИИ СИГНАЛОВ С ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2012 |
|
RU2548032C2 |
| Устройство для цифрового анализа частоты сигналов | 1991 |
|
SU1809403A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| ИЗМЕРИТЕЛЬ ХАРАКТЕРИСТИК ФАЗОВЫХ ФЛУКТУАЦИЙ | 1992 |
|
RU2041469C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ | 1983 |
|
SU1840568A1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460224C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОРСКИХ ЛЕДОВЫХ ПОЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2011 |
|
RU2467347C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |


Использование: изобретение относится к области радиотехники и может быть использовано в когерентно-импульсных радиолокационных станциях или в системах связи для обнаружения полезного сигнала и измерения отношения сигнал/шум. Существо изобретения: устройство позволяет путем накопления и корреляционной обработки фазовой информации обнаружить полезный сигнал на фоне шумов (помех) и выделить значения функции фазовых флуктуаций, обусловленных влиянием помех. На основе полученных зависимостей производится анализ дисперсии фазовых флуктуаций и определение отношения сигнал/шум. Измеренное значение отношения сигнал/шум может использоваться для оценки достоверности и точности радиолокационной информации или качества каналов связи. Устройство содержит последовательно соединенные антенну 1, приемник 2, измеритель 3 фазы, блок 4 памяти, блок 5 коррелятора, пороговый блок 6, индикатор 7, а также последовательно соединенные счетчик 10, схему И 9, генератор 8 опорных функций и блок 11 вычитания, блок 12 вычисления дисперсий, блок 13 вычисления отношений. 1 з.п.ф-лы., 6 ил.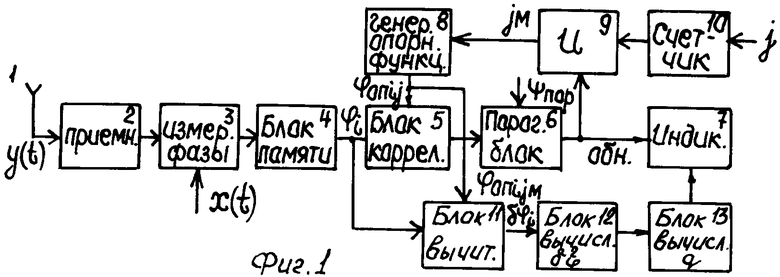
| Устройство для измерения отношения"СигНАл-шуМ | 1979 |
|
SU808996A1 |
| Измеритель отношения гармонического и фазоманипулированного сигналов к шуму в каналах связи | 1986 |
|
SU1337834A1 |
| Б.В.Тарабрина | |||
| - М., 1981, с.58 - 62 | |||
| Пестряков В.Б | |||
| Фазовые радиотехнические системы | |||
| - М., 1968, с.23 - 25 | |||
| Гитис Э.И | |||
| Преобразователи информации для ЭЦВУ, 1975, с.153 - 160. | |||
