Изобретение относится к радиоизмерительной технике и может быть использовано для измерения частоты или разности частот гармонических сигналов.
Известно устройство для измерения частоты с перестраиваемым опорным генератором, в котором с помощью цифрового фазового детектора определяется код разности фаз между измеряемым и опорным колебаниями. Полученные значения разности фаз используются для постройки частоты опорного генератора. В момент равенства частот код управления частотой опорного колебания соответствует значению измеряемой частоты (патент США N 4144489, кл. G 01 R 23/02, опублик. 1979). Простая схема преобразователя частота - код выполнена полностью на цифровых электронных схемах.
К недостатку устройства с перестраиваемым опорным генератором следует отнести невысокую точность измерения из-за конечной дискретности формирования сетки опорных частот и флуктуационных ошибок при проведении замеров фазы. Кроме того, ограничен диапазон измерения частоты из-за неоднозначности фазовых измерений.
Наиболее близким к изобретению является устройство для измерения разности исследуемой fx и эталонной fэт частот, в котором используется информация о сдвиге фазы колебания разностной частоты ϕр(t) за время задержки τ:
Δϕ(τ)=ϕp(t)-ϕp(t-τ)=2πΔfτ , где ϕp(t)=ϕx(t)-ϕy(t);
ϕx(t) и ϕy(t) - текущая фаза соответственно измеряемого и эталонного колебаний;
Δf = fx - fy.
По величине разности фаз Δϕ(τ) определяется значение разности частот
Δf =  .
.
Устройство включает в свой состав два фазовых детектора, фазовращатель на  , линию задержки наτ , коррелятор и блок преобразователя (заявка Японии N 55-15667, кл.G 01 P 23/06, опублик. 1980). На первый фазовый детектор поступают колебания частот fx и fэт, на второй - колебания частоты fx, сдвинутые по фазе на
, линию задержки наτ , коррелятор и блок преобразователя (заявка Японии N 55-15667, кл.G 01 P 23/06, опублик. 1980). На первый фазовый детектор поступают колебания частот fx и fэт, на второй - колебания частоты fx, сдвинутые по фазе на  , и fэт. Выходной сигнал первого фазового детектора и задержанный на τ выходной сигнал второго фазового детектора поступают на коррелятор, на выходе которого формируется уровень напряжения, пропорциональный разности частот исследуемого и эталонного колебаний: U=K˙Δfτ, где К - константа. В блоке преобразователя осуществляется преобразование напряжения в код разностной частоты Δf =
, и fэт. Выходной сигнал первого фазового детектора и задержанный на τ выходной сигнал второго фазового детектора поступают на коррелятор, на выходе которого формируется уровень напряжения, пропорциональный разности частот исследуемого и эталонного колебаний: U=K˙Δfτ, где К - константа. В блоке преобразователя осуществляется преобразование напряжения в код разностной частоты Δf =  . По значению разностной частоты Δf можно определить частоту исследуемого колебания: fx = fэт + Δf.
. По значению разностной частоты Δf можно определить частоту исследуемого колебания: fx = fэт + Δf.
К недостаткам известного устройства следует отнести то, что диапазон измерения частоты, точнее разности частот, Δfмакс ограничен диапазоном однозначного преобразования в фазовых детекторах:
Δϕ=1πΔfмаксτ≅2π .
Отсюда время задержки выбирается из
соотношения τ ≅  . Кроме того,
. Кроме того,
точность измерения частоты σf ограничена погрешностью получения фазовых отсчетов:
σf≥  , где σϕ- среднеквадратическое отклонение отсчета фазы.
, где σϕ- среднеквадратическое отклонение отсчета фазы.
Например, при σϕ= 0,1 рад получают довольно значительную относительную погрешность измерения частоты: · 100 % ≥ 1,6 % .
· 100 % ≥ 1,6 % .
Можно уменьшить погрешность измерения, если увеличить в несколько раз время задержки τ, однако во столько же раз уменьшается диапазон однозначного измерения частоты.
Техническим результатом от использования изобретения является повышение точности измерения частоты (или разности частот) в значительно большем диапазоне ее однозначного измерения.
Поставленная задача решается следующим образом.
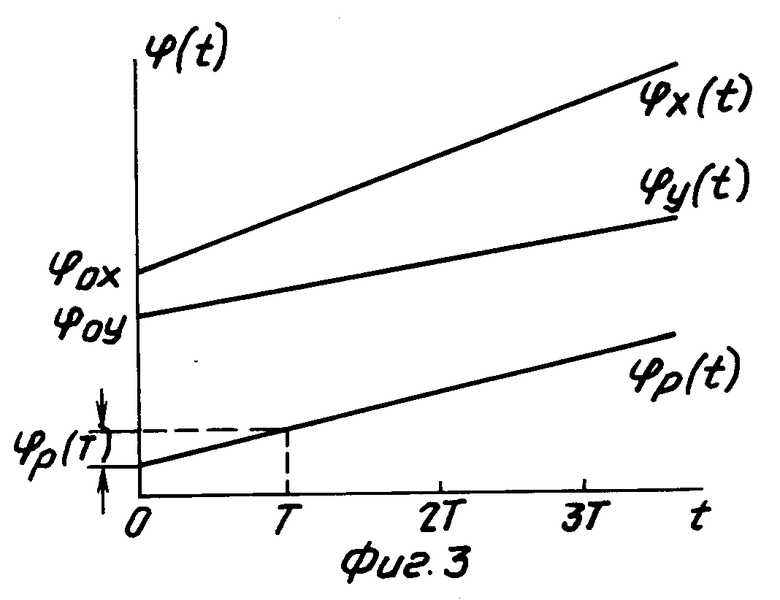
Величина разности частот входных колебаний Δf = fx - fyопределяется по относительному набегу фазы ϕp(t) на интервале времени Т (фиг.3):
ϕp(T) = 2πΔf˙T (1)
Отсюда
Δf =  (2)
(2)
Значения ϕp(t) формируются с помощью фазовращателя.
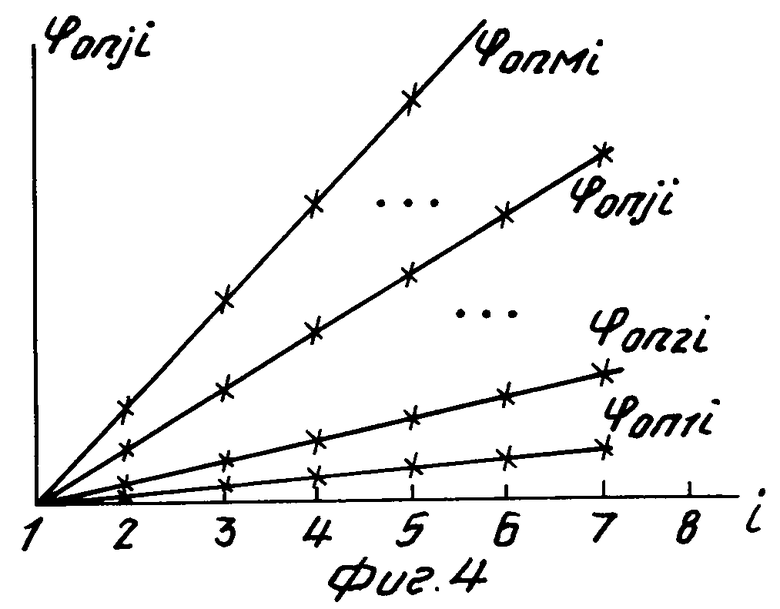
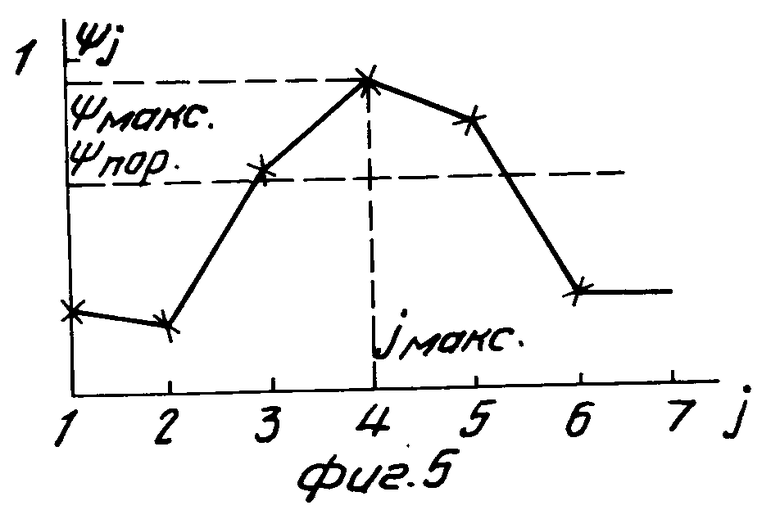
Для уменьшения флуктуационной составляющей ошибки измерения осуществляются накопление n замеров фазы и их корреляционная обработка (вычисление корреляционных функций Ψj) путем сравнения с набором из М опорный функций фазы ϕоnji (фиг.3,4).
Простое усреднение фазовой информации не эффективно из-за неоднозначности фазовых замеров на временном интервале, большем Т.
За счет накопления и корреляционной обработки n замеров фазы дисперсия флуктуационной ошибки измерения σϕ2 уменьшается в n раз.
Значение разностной частоты определяется по кодовому значению параметра опорной функции фазы jмакс, при сравнении с которой получено максимальное значение корреляционной функции Ψiмакс (фиг.5).
Каждая опорная функция фазы соответствует определенной разности частот
Δf = j δf;
ϕоnju = 2π jδ fiT, (3) где j - кодовое значение частного параметра опорной функции, j = 1,2,...,M;
δf - дискретность отсчета разности частот;
i - номер замера фазы i = 1,2,...,n.
Для уменьшения ошибки дискретности отсчета производится весовая обработка значений частотного параметра j тех корреляционных функций Ψj, которые превысили некоторый заданный порог: Ψj≥Ψпор. При этом вычисляется уточненное значение параметра:
jуг=  . (4)
. (4)
По значению jут определяется разность частот Δf = jут. δf.
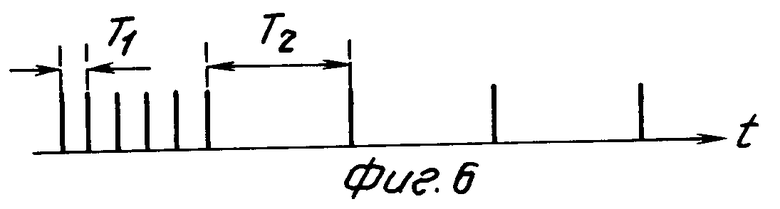
Для повышения точности измерения Δf в заданном диапазоне однозначного измерения используется два этапа накопления и обработки фазовой информации. На первом этапе отсчет фазы ведется с периодичностью Т = Т1, которая обеспечивает требуемый диапазон однозначного измерения частоты Δfмакс. Значение Т1 можно получить из соотношения (1) при ϕp(t) = 2π :
T1=  . (5)
. (5)
При этом дискретность отсчета частоты
δf(1)=  . (6)
. (6)
Здесь дискретность отсчета фазы δϕ определяется точностью ее измерения:
δϕ= (2 - 3) σϕ (7)
На втором этапе обработки периодичность отсчета фазы Т увеличивается в N раз, т.е. T2 = NT1. При этом точность измерения частоты в соответствии с выражением (6) также увеличивается в N раз. Тем самым реализуется двухшкальный метод фазовых измерений. Значение N выбирается исходя из условия
N =  . (8)
. (8)
Следовательно, диапазон однозначного измерения фазы на втором этапе должен соответствовать дискретности его отсчета на первом этапе измерения.
Таким образом, в заданном диапазоне однозначного измерения частоты устройство обеспечивает выигрыш в точности измерения за счет двухшкального метода отсчета в N раз. За счет накопления n замеров фазы в n раз уменьшается дисперсия флуктуационной ошибки. Использование весовой обработки кодовых замеров частоты позволяет уменьшить ошибку дискретности отсчета.
Решение поставленной задачи достигается тем, что устройство, содержащее фазовый детектор, коррелятор и блок преобразователя, введены регистр памяти, блок весовой обработки, формирователь опорных функций и блок управления. Вместо аналогового фазового детектора использован цифровой фазоизмеритель, а коррелятор выполнен на цифровых элементах и содержит два квадратурных канала.
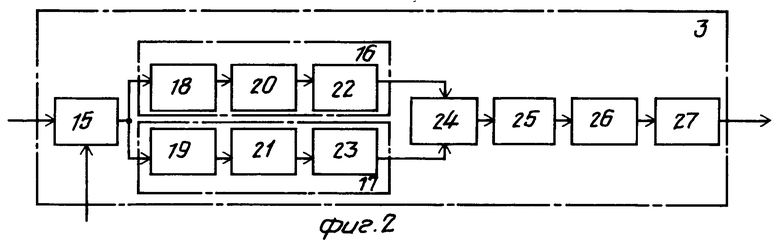
Структурная схема устройства приведена на фиг.1; схема коррелятора - на фиг.2; работа устройства поясняется эпюрами на фиг.3-6.
Устройство содержит последовательно соединенные блок 1 фазоизмерителя, регистр 2 памяти, коррелятор 3, блок 4 весовой обработки и блок 5 преобразователя кодов, а также формирователь 7 опорных функций, первый выход которого соединен с вторым входом коррелятора 3, а второй выход - с вторым входом блока 4 весовой обработки и блок 6 управления, первый выход которого соединен с вторым входом блока 1 фазоизмерителя, второй выход - с вторыми входами регистра 2 памяти и формирователя 7 опорный функций 7, а третий выход - с первым входом формирователя опорных функций. Блок 4 весовой обработки содержит последовательно соединенные умножитель 8, первый накапливающий сумматор 9 и блок 11 деления, а также второй накапливающий сумматор 10, вход которого соединен с первым входом блока весовой обработки, а выход - с вторым входом блока деления, выход которого является выходом блока весовой обработки, причем второй вход умножителя 8 соединен с вторым выходом формирователя 7 опорных функций. Формирователь 7 опорных функций включает в свой состав последовательно соединенные счетчик-регистр 14, блок 13 съема кодов и третий накапливающий сумматор 12, причем вход счетчика-регистра является первым входом формирователя 7, второй вход блока съема кодов - вторым входом формирователя, выход третьего накапливающего сумматора является первым выходом формирователя, а выход счетчика-регистра - вторым выходом формирователя опорных функций.
Коррелятор 3 (фиг.2) содержит последовательно соединенные блок 15 вычитания, два параллельно включенных квадратурных канала 16 и 17, сумматор 24, блок 25 извлечения квадратного корня, блок 26 нормировки и компаратор 27 кодов. Первый квадратурный канал 16 состоит из последовательно соединенных блоков 18 вычисления косинуса, четвертого накапливающего сумматора 20 и первого квадратора 22, второй квадратурный канал 17 содержит последовательно соединенные блок 19 вычисления синуса, пятый накапливающий сумматор 21 и второй квадратор 23. Первый вход блока 15 вычитания является первым входом коррелятора, а второй вход - вторым входом коррелятора, выход компаратора кодов является выходом коррелятора.
Устройство работает следующим образом.
Колебания частоты fx и fy поступают соответственно на первый и второй входы блока 1 фазоизмерителя. Текущая фаза колебаний ϕx(t) и ϕy(t) изменяется в соответствии со значениями частот (фиг.3). В блоке фазоизмерителей осуществляется измерение разности фаз между входными колебаниями:
ϕp(t) = ϕx(t) - ϕy(t) = (2π fxt + ϕox) -
- (2π fyt + ϕoy) = 2πΔft +Δ ϕo. (9)
Всего проводятся две серии измерений, из них n измерений с периодом Т1 и n с периодом Т2 = NT1:
ϕpi(1) = 2 πΔfiT1 + Δϕo, i = 1,2,...,n;
ϕpi(2) = 2π ΔfiT2 + Δϕo, i = n + 1, n + 2,...,2n (10)
Первая серия замеров обрабатывается на первом этапе измерений разности частот (по первой шкале отсчета), вторая - на втором этапе (по второй шкале). Отсчеты производятся в моменты времени ti, определяемые синхроимпульсами СИ1 частоты F1=  и F2=
и F2=  , поступающими из блока 6 управления (фиг. 6).
, поступающими из блока 6 управления (фиг. 6).
Период Т1 определяется требуемым диапазоном однозначного измерения разности частот Δfмакс (5).
Отсчеты ϕpi(1) и ϕpi(2) записываются в регистр памяти для кратковременного хранения.
Дискретность отсчета фазы δϕ в фазоизмерителе определяется точностью ее измерения (7). Целесообразно выбрать
δϕ =  =
=  , где m - целое число (разрядность двоичного кода фазы) для удобства цифровой обработки. Например, при δϕ= 0,2 рад и накоплении n = 16 замеров фазы δϕ =
, где m - целое число (разрядность двоичного кода фазы) для удобства цифровой обработки. Например, при δϕ= 0,2 рад и накоплении n = 16 замеров фазы δϕ =  ≈ 0,1 рад , при этом N = 64, m = 6. Следовательно, в данном случае с выхода фазоизмерителя имеют шестиразрядный код фазы ϕpi. Единице младшего разряда кода соответствует значение δϕ =
≈ 0,1 рад , при этом N = 64, m = 6. Следовательно, в данном случае с выхода фазоизмерителя имеют шестиразрядный код фазы ϕpi. Единице младшего разряда кода соответствует значение δϕ =  рад , а код N = 2m =64 соответствует 2 π рад.
рад , а код N = 2m =64 соответствует 2 π рад.
На первом этапе обработки сдвиг фазы ϕp(1)(T1) = 2π определяется разностной частотой Δf = Δf макс, а сдвиг фазы ϕp(1)(T1) =δϕ(1) - частотой δf(1)=  . На втором этапе максимальный диапазон измерения частоты равен δf(1), а дискретность отсчета δf(2)=
. На втором этапе максимальный диапазон измерения частоты равен δf(1), а дискретность отсчета δf(2)=  =
=  .
.
С помощью синхроимпульсов СИ2 с частотой следования Fiосуществляется перенос кодов ϕpi на вход коррелятора 3. Коррелятор 3 обеспечивает сравнение полученной функции фазы ϕpi с набором из j = 1,2,...,М опорных функций ϕопji путем вычисления корреляционных функций в соответствии с выражением
Ψj= 
 ,
,
(11) где Δϕji = ϕpi -ϕопji.
Вид опорных функций показан на фиг.4. Каждая из них соответствует определенной разности частот Δfi = jδ f:
ϕопji = 2π jδ fiT, где δf - дискретность отсчета частоты, соответствующая дискретности отсчета фазы δϕ =  .
.
На первом этапе используются замеры фазы с периодом Т1, при этом дискретность отсчета частоты равна δf(1), на второй этапе период отсчета Т2 = NT1, а дискретность отсчета δf(2)=  . Следовательно, вид (значения) опорных функций один и тот же на обоих этапах обработки. Опорные функции ϕопji формируются в формирователе 7 в виде последовательности кодовых значений ϕопji = ji, где цена одной кодовой единицы соответствует сдвигу по фазе δϕ = 2π δf(1)T1 = 2 π δf(2)T2, т.е. одна и та же на обоих этапах обработки.
. Следовательно, вид (значения) опорных функций один и тот же на обоих этапах обработки. Опорные функции ϕопji формируются в формирователе 7 в виде последовательности кодовых значений ϕопji = ji, где цена одной кодовой единицы соответствует сдвигу по фазе δϕ = 2π δf(1)T1 = 2 π δf(2)T2, т.е. одна и та же на обоих этапах обработки.
Для формирования значений ϕопji из блока 6 управления поступают две серии синхроимпульсов СИ3 с частотой Fj, которые последовательно записываются в счетчик-регистр 14 и определяют значения j = 1,2,...,М, являющиеся параметрами опорных функций. Значению j соответствует разностная частота Δf = jδf(1) на первом этапе обработки и Δf = jΔ f(2)на втором этапе.
Серии из n синхроимпульсов СИ2 с частотой Fi поступают из блока управления на блок 13 и обеспечивают съем кодов j на накапливающий сумматор 12. Они обеспечиваются как импульсы i = 1,2,...,n. В результате на накапливающем сумматоре 12 последовательно формируются кодовые значения опорных функций ϕопji = j.i.
Частота следования импульсов Fi в n раз больше частоты Fj, чтобы с одним значением параметра j сформировать n значений очередной опорной функции. Всего за два этапа обработки формируются две серии импульсов частоты Fi по М импульсов в каждой и 2М серии импульсов частоты Fi по n импульсов в одной серии.
Обработка фазовой информации в корреляторе 3 (фиг.2) производится в соответствии с выражением (11).
В блоке 15 вычитания формируется разность фаз Δϕji = ϕpi = ϕопji. Далее в квадратурных каналах 16 и 17 определяются квадраты сумм косинусов и синусов полученных разностей фаз. После суммирования квадратурных составляющих, вычисления квадратного корня и нормировки в блоках 24-26 нормированные значения корреляционных функций Ψj поступают на компаратор 27 кодов. Здесь осуществляется сравнение значений корреляционных функций с некоторым пороговым уровнем: Ψj ≥Ψпор, чтобы далее выделить параметры тех опорных функций фаз, которые в наибольшей степени совпадают с функцией фазы разностной частоты fpi.
В блоке 4 производится весовая обработка значений j для Ψj ≥Ψпор в соответствии с выражением (4). Это необходимо для уменьшения ошибки дискретности измерения. Произведения jΨj формируются в умножителе 8, на который значения поступают со счетчика-регистра 14. В сумматорах 9 и 10 соответственно накапливаются суммы  jΨj и
jΨj и  Ψj , и их отношение формируется в блоке 11 деления.
Ψj , и их отношение формируется в блоке 11 деления.
Полученное уточненное значение параметра jут в блоке 5 преобразуется в значение разности частот в соответствии с ценой одной кодовой единицы. На первом этапе обработки Δf(1) = jут1˙δf(1), на втором этапе Δf(2)= jут2δf(2)= jут2 .
.
Результирующее значение разности частот получают как сумму Δf=Δ f(1) + Δf(2) путем суммирования кодов в выходном регистре блока 5 преобразования.
Если одно из колебаний является эталонным (в известной частотой fэт), то по величине Δf можно определить значение измеряемой частоты
fx = fэт + Δf.
В качестве пояснения рассмотрим пример выбора и обоснования основных параметров предложенного устройства.
Пусть необходимо обеспечить однозначное измерение разности частот в диапазоне Δfмакс = 10 кГц фазовым методом с точностью до 1 Гц, если фазоизмеритель имеет среднеквадратическую ошибку измерения разности фаз σϕ= 0,1 рад и осуществляется накопление серии из n = 16 замеров фазы.
Период отсчета разности фаз на первом этапе обработки в соответствии с выражением (5) выбирается равным T1=  = 10-4 с .
= 10-4 с .
Дискретность отсчета фазы при этом определяется из соотношения (7) (с учетом накопления):
δϕ = 2  = 0,05 =
= 0,05 =  =
=  рад.
рад.
Следовательно, отсчет фазы производится в виде семиразрядного двоичного кода, т.е. m = 7, N = 128. Дискретность отсчета частоты при этом составляет величину
δf(1)=  = 80 Гц.
= 80 Гц.
На втором этапе обработки используются замеры фазы с периодичностью отсчета
Т2 = NT1 = 12,8.10-3 с.
При этом дискретность отсчета частоты
δf(2)=  = 0,7.
= 0,7.
Величина δf(2) = 0,7 Гц соответствует максимальной ошибке измерения частоты в устройстве и удовлетворяет заданным требованиям. Эта ошибка в результате весовой обработки в блоке 4 еще уменьшается в 2-3 раза.
В диапазоне Δfмакс = 10 кГц необходимо выбрать время задержки τ  = 10-4 с . При этом для σϕ = 0,1 рад, σf ≥
= 10-4 с . При этом для σϕ = 0,1 рад, σf ≥  ≈ 160 Гц .
≈ 160 Гц .
Следовательно, ошибка измерения в прототипе гораздо больше, чем в предложенном устройстве.
При технической реализации устройства блок 1 фазоизмерителя выполняется в виде преобразователя сдвига фаз ϕр между колебаниями частоты во временной интервал Δt, который заполняется счетными импульсами. Период счетных импульсов Тсч должен быть согласован с максимальной длительностью временного интервала Δtмакс, соответствующего сдвигу фаз ϕр = 2π рад, а именно Tсч =  .
.
Регистр 2 памяти, накапливающие сумматоры 9,10,12, 20, блок 15 вычитания, сумматор 24, счетчик-регистр 14 являются типовыми элементами цифровых импульсных устройств и выполняются на базе соответствующих интегральных микросхем. Блоки умножения кодов 8, возведения в квадрат 22, 23 и деления 11 реализованы в виде типовых арифметических устройств, в частности на основе сдвиговых регистров. Блоки вычисления тригонометрических функций косинуса и синуса 18 и 19, извлечения квадратного корня 25 выполняются в виде дешифраторов кодов. Блок 13 съема кодов выполняется в виде набора схем И, с помощью которых по импульсам опроса, следующим с частотой Fi, производится перенос кода j из счетчика-регистра 14 в накапливающий сумматор 12. Блок 26 нормировки обеспечивает деление на n (на количество измерений). Он выполняется на основе счетчика-регистра с обратными связями. Компаратор 27 кодов построен по схеме отбора чисел в интервале от Ψпор до единицы. Блок 5 преобразования кодов выполняется в виде умножителя параметра jут на константу δf и содержит выходной регистр, на который записываются результаты измерения разностной частоты после первого и второго этапов обработки фазовой информации. Блок 6 управления формирует последовательности синхроимпульсов частоты F1, F2, Fi и Fj. Он выполняется на основе мультивибраторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ОТНОШЕНИЯ СИГНАЛ-ШУМ | 1992 |
|
RU2117954C1 |
| Устройство для цифрового анализа частоты сигналов | 1991 |
|
SU1809403A1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2012 |
|
RU2497136C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ОПТИЧЕСКОГО СИГНАЛА СУММИРОВАНИЕМ ПУЧКОВ ИЗЛУЧЕНИЯ N ЛАЗЕРОВ В ВЕРШИНЕ КОНИЧЕСКОЙ ПОВЕРХНОСТИ И ПЕРЕДАТЧИК КОГЕРЕНТНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 1992 |
|
RU2109384C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2168267C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| УСТРОЙСТВО ЭЛЕКТРОННОГО СМЕЩЕНИЯ ЧАСТОТЫ | 1989 |
|
SU1840230A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения частоты или разности частот гармонических сигналов. Устройство для измерения частоты и разности частот сигналов содержит блок 1 фазоизмерителя, регистр 2 памяти, коррелятор 3, блок 4 весовой обработки, блок 5 преобразователя кодов, блок 6 управления, формирователь 7 опорных функций. Коррелятор 3 содержит блок вычитания, два параллельно включенных канала, сумматор, блок извлечения квадратного корня, блок нормировки, компаратор кодов. 1 з.п. ф-лы, 6 ил.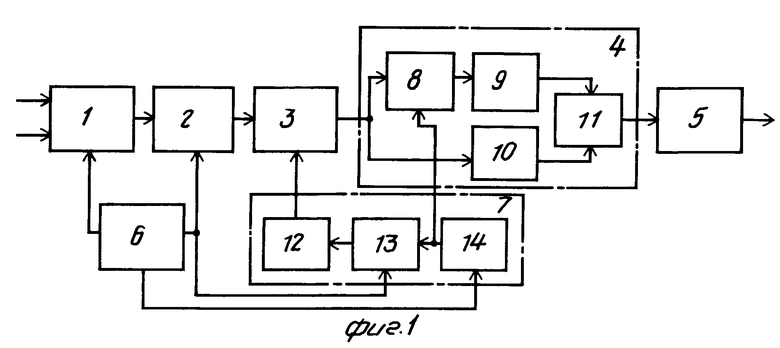
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
