Изобретение относится к способам управления индукторными двигателями, в том числе тяговыми, имеющими зубчатый статор и ротор.
Известен способ управления индукторным двигателем (“токовый коридор”), заключающийся в том, что внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают импульсы напряжения так, чтобы ток не выходил за рамки “токового коридора”, т.е. был приблизительно постоянным (см. Электровозостроение: сб. науч. тр. ОАО “Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения” (ОАО “ВЭлНИИ”). - 2000. - Т.42 - 324 с. на с.186 и журнал “Электротехника” №6/98, с. 25-26, рис.26 и 46).
При таком регулировании тока момент двигателя (см. книгу A.В.Иванова-Смоленского. Электрические машины. М.: Энергия, 1980, с.162 и с.188) описывается выражением
где i - фазный ток двигателя;
L - индуктивность фазной обмотки двигателя;
Θ - угол поворота ротора двигателя.
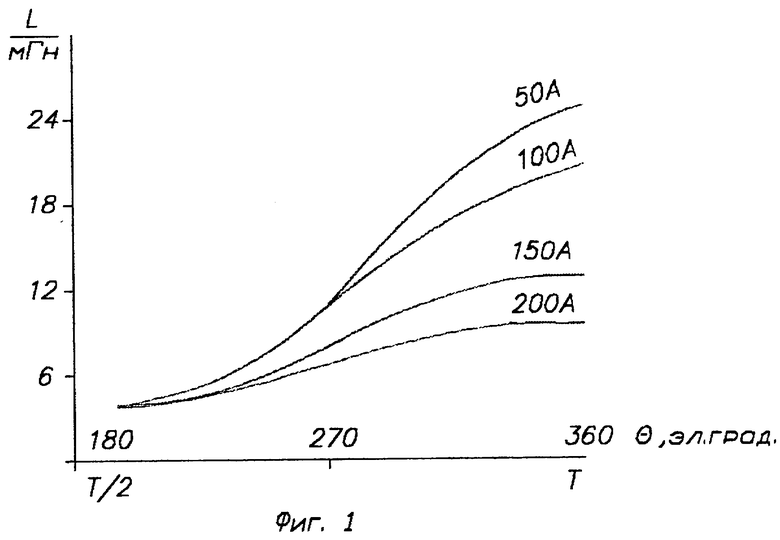
На фиг.1 приведена в качестве примера зависимость индуктивности L индукторного двигателя от угла поворота Θ на полупериод датчика положения ротора для двигателя НТИ-350 (при повороте ротора из положения паз-зубец в положение зубец - зубец). Изменение  в большом диапазоне при постоянном токе предопределяет большие пульсации момента на валу двигателя, что ведет к преждевременному износу приводного механизма и двигателя, а при использовании индукторного двигателя в качестве тягового, провоцирует еще и боксование.
в большом диапазоне при постоянном токе предопределяет большие пульсации момента на валу двигателя, что ведет к преждевременному износу приводного механизма и двигателя, а при использовании индукторного двигателя в качестве тягового, провоцирует еще и боксование.
Наиболее близким по технической сущности является способ управления индукторным двигателем, заключающийся в том, что формируют токи в двигателе, для чего измеряют периоды сигнала датчика положения ротора двигателя, внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают как минимум один импульс напряжения, в зависимости от длительности T предшествующего периода датчика положения ротора определяют временные интервалы t1 от начала текущего периода датчика положения ротора до момента появления импульсов напряжения и t2 от начала текущего периода датчика положения ротора до окончания импульсов напряжения, причем интервал t1 определяют в соответствии с формулой
t1=T/2-A,
где А - интервал времени, представляющий собой опережение момента подачи первого импульса напряжения относительно момента времени Т/2, причем А выбирается таким, что
0≤A≤Amax,
где Amax=T/N, N - постоянный коэффициент, выбираемый в пределах
4≤N≤10,
а интервал t2 определяют в соответствии с формулой
t2=T-A-C,
где С- интервал времени, представляющий собой укорочение зоны подачи напряжения относительно интервала времени Т/2, причем С выбирают таким, что
0≤C≤Cmax,
где Cmax=T/N1, N1 - постоянный коэффициент, выбираемый в пределах
12 ≤ N1 ≤ 30,
а при Т<T0 - в соответствии с формулой:
t2=X·T-(X-1)·T0-A-C,
где Т0 - значение периода датчика положения ротора, при котором должно начаться ограничение частоты вращения двигателя;
Х - постоянный положительный коэффициент, выбираемый тем большим, чем более жесткое ограничение частоты вращения требуется получить (см. описание изобретения к патенту Российской Федерации RU 2118039 С1, кл. 6 Н 02 Р 8/12, Н 02 К 19/06, опубл. 20.08.98, БИ 23).
Способ также создает большие пульсации момента, т.к. реализует "токовый коридор" (см. фиг.1 описания изобретения к патенту RU 2118039 С1) и не учитывает изменения  в зависимости от тока и утла поворота ротора.
в зависимости от тока и утла поворота ротора.
Задачей изобретения является снижение пульсаций момента индукторного двигателя за счет формирования фазных токов, учитывающего изменение индуктивности в процессе управления.
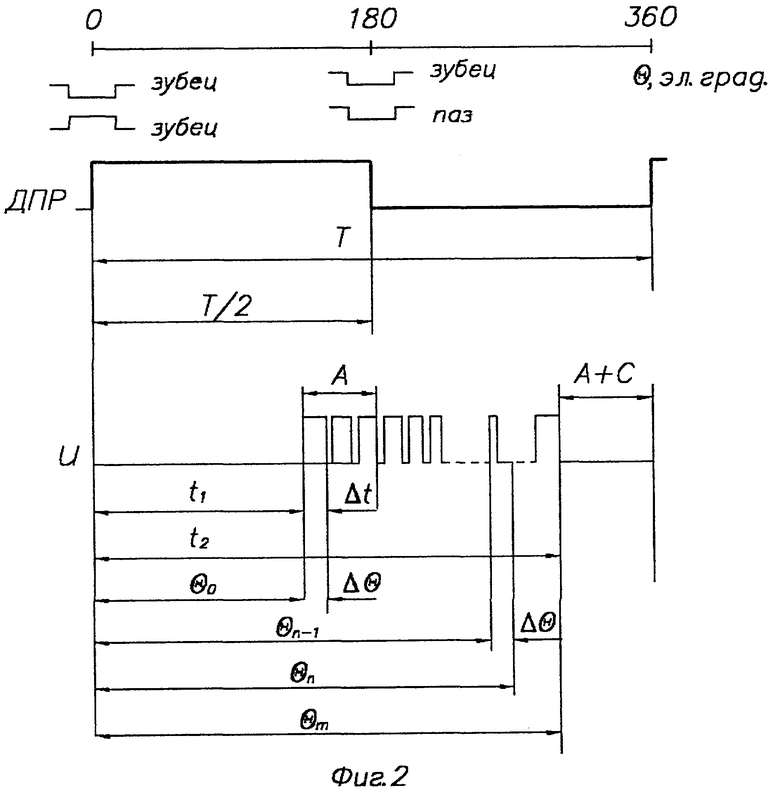
Поставленная задача решается способом управления индукторным двигателем, в котором токи в фазных обмотках формируют путем подачи на обмотку импульсов напряжения в течении каждого периода датчика положения ротора (ДПР) двигателя, для чего измеряют период между двумя соседними фронтами сигнала ДПР, а временные интервалы t1 от момента появления фронта сигнала ДПР до момента начала подачи импульсов напряжения и t2 - от момента появления фронта сигнала ДПР до окончания подачи импульсов напряжения (см. фиг.2) вычисляют в ходе цикла управления по формулам:
t1=T/2-A; t2=T-A-C,
где T -длительность предыдущего периода ДПР;
А и С - соответственно опережение и укорочение, представляющие собой интервалы времени, причем:

где N и N1 - постоянные коэффициенты.
При Т<Т0 t2 вычисляют по формуле
t2=X·Т-(Х-1)·Т0-А-С,
где Т0 - значение периода ДПР, при котором начинается ограничение частоты вращения двигателя;
Х - постоянный положительный коэффициент, тем больший, чем более жесткое ограничение частоты можно получить.
Интервал времени от t1 до t2 разбивают еще на m равных интервалов  соответствующих углу поворота ротора
соответствующих углу поворота ротора  где (см. фиг.2) Θ0 - угол поворота ротора, соответствующий моменту времени t1, а Θm - угол поворота ротора, соответствующий моменту времени t2. В каждом из этих интервалов формируют импульс напряжения длительностью от начала n-го интервала до момента достижения фазным током значения in, определяемого по формуле:
где (см. фиг.2) Θ0 - угол поворота ротора, соответствующий моменту времени t1, а Θm - угол поворота ротора, соответствующий моменту времени t2. В каждом из этих интервалов формируют импульс напряжения длительностью от начала n-го интервала до момента достижения фазным током значения in, определяемого по формуле:

где М3(Θn) - заданное значение момента на n-м интервале;
L(Θn, in-1) - значение индуктивности в конце n-го интервала при токе in-1;
L(Θn-1, in-1) - значение индуктивности в конце (n-1)-го или в начале n-го интервала при токе in-1,
ΔΘ-угол поворота ротора на n-м интервале;
in-1 - значение фазного тока в конце (n-1)-го интервала.
Если в начале n-го интервала фазный ток больше значения in, то импульс напряжения на фазную обмотку не подается.
Приближенная формула (1) для момента не учитывает насыщение магнитной системы. С учетом насыщения момент определяется (см. книгу А.В.Иванова-Смоленского. Электромагнитные силы преобразования энергии в электрических машинах. М.: Высш. шк., 1989. с.46):
где dW- магнитная энергия;
или, переходя к интервалам ΔΘ,

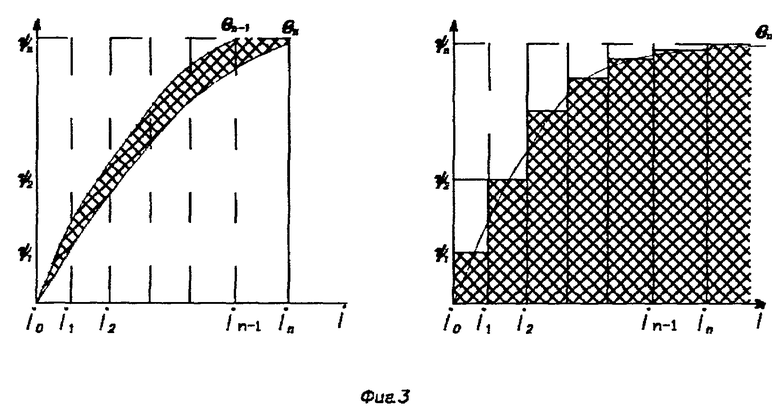
Фиг.3 иллюстрирует определение электромагнитного момента энергетическим методом:


где ψ- потокосцепление, ψ=L·i.
Дальнейшими преобразованиями (3) приводится к виду:

Очевидно, что для снижения пульсаций момента необходимо в формуле (3) положить значение момента постоянным, равным заданному M(Θn)=M3(Θn)=const, и как следует из (4), на n-м интервале достичь величины тока (2)
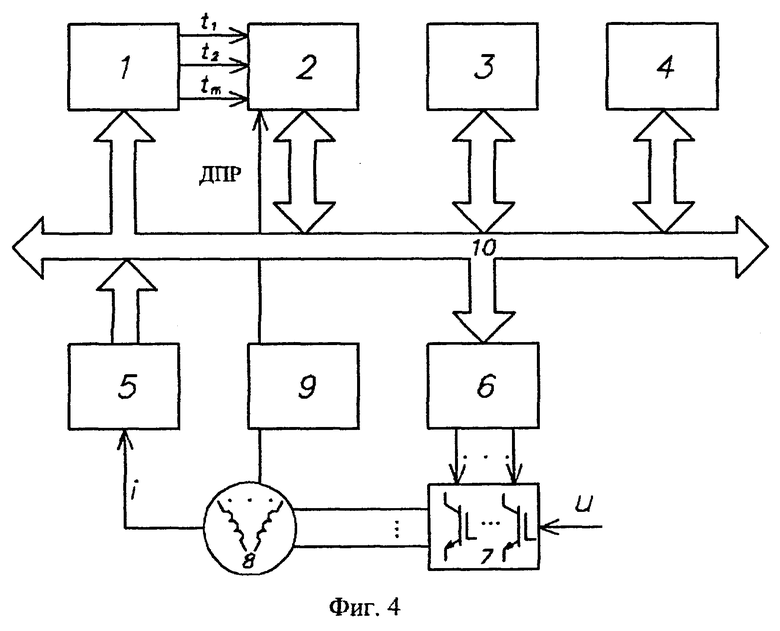
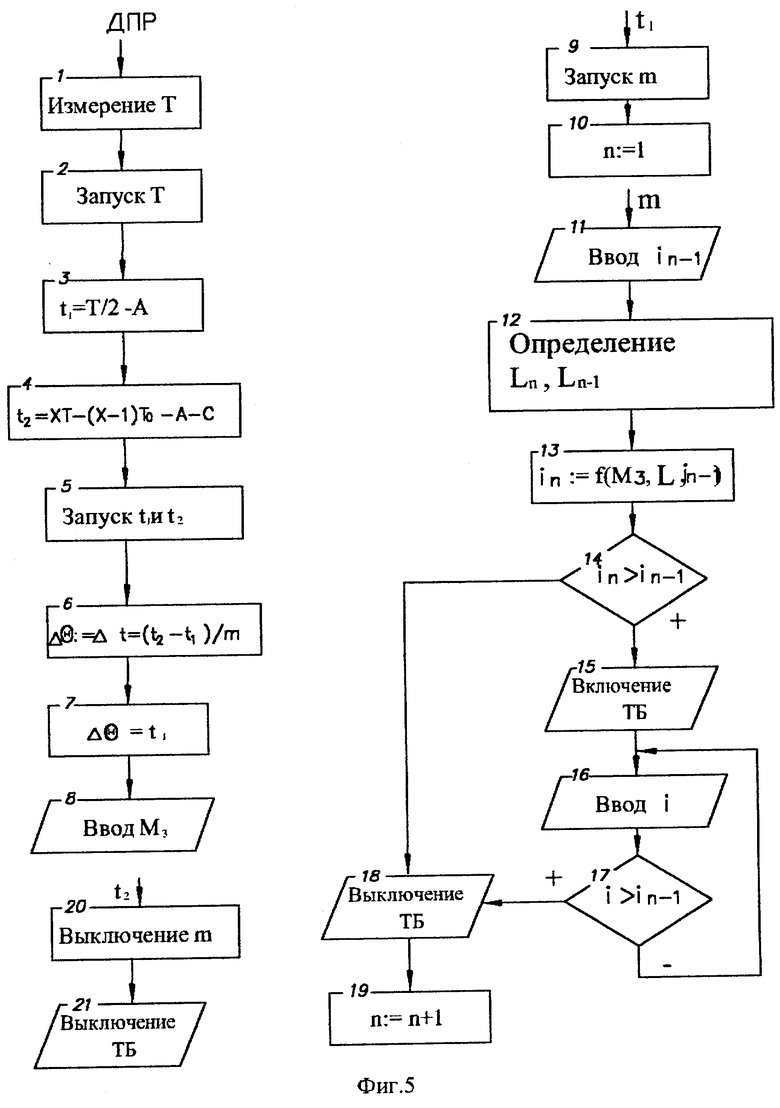
На фиг.4 изображено устройство для реализации предлагаемого способа; на фиг.5 - алгоритм функционирования устройства.
Способ осуществляется микропроцессорной системой, состоящей из блока таймеров 1, процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, аналогово-цифрового преобразователя (АЦП) 5, блока драйверов 6, транзисторного блока 7, управляющего индукторным двигателем 8, имеющего датчики положения ротора (ДПР) 9. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, входы блока таймеров 1, блока драйверов 6 и выход АЦП 5 объединены шиной адресов-данных 10. Выходы блока таймеров 1 и ДПР 9 соединены с шинами прерывания процессора 2. Ток двигателя 8 i поступает на вход АЦП 5. Выходы транзисторного блока 7, запитанного постоянным напряжением и, нагружены на обмотки индукторного двигателя 8.
Процессор, ОЗУ, ПЗУ, блок таймеров, АЦП могут быть, интегрированы в специализированный контроллер, например M167-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037, Москва, Измайловская пл., 7).
Способ реализуется алгоритмом, приведенным на фиг. 5.
Алгоритм состоит из 4-х подпрограмм, которые запускаются сигналами прерываний ДПР от ДПР 9 и блока таймеров 1 - t1, t2, tm.
Первая подпрограмма начинается по переднему фронту сигнала ДПР от ДПР 9. Считывается значение кода из таймера Т, соответствующее периоду сигнала ДПР (блок 1) и снова запускается таймер Т (блок 2). Затем определяются временные интервалы t1 (блок 3) и t2 (блок 4) и запускаются таймеры t1 и t2 в блоке таймеров 1 (блок 5). В блоке 6 определяется величина дискреты повторения вычислений необходимого значения тока на интервале от t1 до t2, а в блоке 7 - начальное значение угла поворота Θ0 ротора индукторного двигателя 8, для вычисления значений тока полагается равным t1. Заканчивается подпрограмма вводом заданного значения момента М3 (блок 8).
Вторая подпрограмма начинается по приходу сигнала от таймера t1, запущенного в первой подпрограмме.
В этой подпрограмме запускается таймер "m" интервала повторения вычислений (блок 9) и номеру интервала повторения вычислений присваивается значение единицы.
Таймер "m" периодически выдает сигналы прерываний, по которым выполняется третья подпрограмма, в которой определяются необходимые значения тока двигателя на каждом интервале повторения вычислений. Для этого в блоке 11 вводится значение тока, соответствующее началу интервала. Затем в блоке 12 обновляются значения индуктивностей для вычисления нужного значения тока на этом интервале, которое определяется в блоке 13 в соответствии с формулой (2). В блоке 14 сравнивается вычисленная величина тока in, которую необходимо достичь на данном интервале, со значением тока in-1 в начале этого интервала и, если оно меньше, то транзисторы транзисторного блока 7 не включаются (блок 18), а если больше, то на обмотку индукторного двигателя подается напряжение включением соответствующих транзисторов транзисторного блока 7 (блок 15). В блоке 16 вводится текущее значение тока, которое сравнивается с вычисленным (блок 17); если ток не достиг заданного, процесс сравнения продолжается, а при достижении вычисленного значения транзисторы транзисторного блока 7 выключаются (блок 18), после чего значение "n" увеличивается на единицу (блок 19) и соответствует следующему интервалу повторения вычислений.
Подача импульсов управления прекращается четвертой подпрограммой с приходом сигнала прерывания от таймера t2, при этом прекращается выполнение третьей подпрограммы "m" (блок 20) и выключается транзисторный блок 7 (блок 21).
Величина "m" (количество интервалов повторения вычислений) ограничена "сверху" быстродействием процессора.
Быстродействие современных микропроцессорных контроллеров позволяет реализовать значения m>20 при максимальной скорости вращения ротора, что обеспечивает необходимую точность регулирования тока индукторного двигателя.
Предлагаемый способ управления индукторным двигателем позволяет снизить пульсации момента на валу индукторного двигателя за счет формирования фазных токов, учитывающего изменение индуктивности обмотки при повороте ротора двигателя.
Для апробации способа управления индукторного двигателя были проведены экспериментальные исследования зависимости электромагнитного момента от углового положения ротора для тягового индукторного двигателя мощностью 350 кВт, который в 1999 году изготовлен на ОАО "НПО НЭВЗ" в корпусе серийного тягового асинхронного двигателя. Исследования были проведены на испытательном стенде ОАО "ВЭлНИИ ".
Во время испытаний вращающий момент двигателя снимался магнитоупругим измерителем МИМ-170.02. Каждая фаза двигателя запитывалась от автономного инвертора напряжения, который собран на IGBT транзисторах и диодах фирмы HITACHI. Для управления силовыми транзисторами использовалась микропроцессорная система управления, выполненная на основе микроконтроллера М167-1С.
Для регистрации мгновенных значений вращающего момента и угла поворота был использован измерительно-вычислительный комплекс. Аналого-цифровое преобразование сигналов осуществлялось быстродействующим преобразователем типа L-1250.
Анализ снятых зависимостей показал, что данный способ управления индукторным двигателем снижает пульсацию момента по сравнению со способом “токовый коридор” на 60%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2297091C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ТЯГОВОГО ИНДУКТОРНОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2315419C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2314634C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2251788C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2004 |
|
RU2282300C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294049C1 |
| СЕРВОПРИВОД С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2162041C2 |
Изобретение относится к электротехнике и может быть использовано в электроприводах с индукторным двигателем в электроподвижных составах постоянного и переменного тока. Техническим результатом является снижение пульсаций момента индукторного двигателя за счет формирования фазных токов, учитывающего изменение индуктивности в процессе управления. Способ управления индукторным двигателем состоит в том, что вычисляют моменты подачи t1 и прекращения t2 импульсов напряжения на фазную обмотку от начала периода датчика положения ротора по формулам: t1=T/2-A; t2=Т-А-С, где Т - период сигнала с датчика положения ротора; А - опережение подачи импульсов; С - укорочение зоны подачи импульсов. Интервал между t1 и t2 разбивают еще на m интервалов, на каждом из которых, чтобы снизить пульсации момента, определяют значение тока, величина которого устанавливается в соответствии  где М3Θn - заданное значение момента на n-м; L(Θ n, in-1) - значение индуктивности в конце n-го интервала при токе in-1; L(Θ n-1, in-1) – значение индуктивности в конце (n-1)-го или в начале n-го интервала при токе in-1; Δ Θ - угол поворота ротора на n-м интервале; in-1 - значение фазного тока в конце (n-1)-го интервала, причем, если в начале n-го интервала фазный ток больше значения in, то импульс напряжения не формируют. 5 ил.
где М3Θn - заданное значение момента на n-м; L(Θ n, in-1) - значение индуктивности в конце n-го интервала при токе in-1; L(Θ n-1, in-1) – значение индуктивности в конце (n-1)-го или в начале n-го интервала при токе in-1; Δ Θ - угол поворота ротора на n-м интервале; in-1 - значение фазного тока в конце (n-1)-го интервала, причем, если в начале n-го интервала фазный ток больше значения in, то импульс напряжения не формируют. 5 ил.
Способ управления индукторным двигателем, заключающийся в том, что формируют токи в двигателе, для чего измеряют периоды сигнала датчика положения ротора двигателя, внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают как минимум один импульс напряжения, в зависимости от длительности Т предшествующего периода датчика положения ротора определяют временные интервалы t1 - от начала текущего периода датчика положения ротора до момента появления импульсов напряжения и t2 - от начала текущего периода датчика положения ротора до окончания импульса напряжения, по формулам
t1=Т/2-А,
где А - интервал времени, представляющий собой опережение момента подачи первого импульса напряжения относительно момента времени Т/2, причем А выбирается таким, что 0≤А≤Аmax, где Аmax=Т/N, где N - постоянный коэффициент, выбираемый в пределах 4≤N≤10,
t2=Т-А-С,
где С - интервал времени, представляющий собой укорочение зоны подачи напряжения относительно интервала времени Т/2, причем С выбирают таким, что 0≤С≤Сmax, Cmax=T/N1, N1 - постоянный коэффициент, выбираемый в пределах 12 ≤ N1 ≤ 30, и при Т<Т0,
t2=X·T-(X-1)·T0-A-C,
где Т0 - значение периода датчика положения ротора, при котором должно начаться ограничение частоты вращения двигателя;
Х - постоянный положительный коэффициент, выбираемый тем большим, чем более жесткое ограничение частоты требуется получить,
отличающийся тем, что временной интервал от t1 до t2 разбивают еще на m равных интервалов Δt, соответствующих углу поворота ротора двигателя ΔΘ, в каждом из которых формируют импульс напряжения амплитудой un от начала текущего n-го интервала до момента достижения фазным током величины in, определяемой в соответствии с формулой
где М3(Θn) - заданное значение момента на n-м интервале;
L(Θn, in-1) - значение индуктивности в конце n-го интервала при токе in-1;
L(Θn-1, in-1,) - значение индуктивности в конце (n-1)-гo или в начале n-го интервала при токе in-1;
in-1 - значение фазного тока в конце (n-1)-гo интервала,
причем, если в начале n-го интервала фазный ток больше значения in, то импульс напряжения не формируют.
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| МОСТОВОЙ ИНВЕРТОР И СХЕМА ЕГО УПРАВЛЕНИЯ | 1998 |
|
RU2139624C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| US 4647802 A, 03.03.1987 | |||
| US 5015939 A1, 14.05.1991 | |||
| DE 3826892 С2, 12.03.1989 | |||
| В П Т Ь;>& Л ГНИЯ ( У.!]Ьч>&()К(ли!(Я>&1?;;нд^?^:;^1^в | 0 |
|
SU397514A1 |

