Изобретение относится к способам управления индукторными двигателями, в том числе тяговыми, имеющими зубчатый статор и ротор.
Известен способ управления индукторным двигателем ("токовый коридор"), заключающийся в том, что внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают импульсы напряжения так, чтобы ток не выходил за рамки "токового коридора", т.е. был приблизительно постоянным (см. Электровозостроение: сб. науч. тр. ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" (ОАО "ВЭлНИИ"). - 2000. - Т.42 - 324 с. на с.186 и журнал "Электротехника" №6/98, с.25-26, рис.26 и 46).
Изменение  в большом диапазоне при постоянном токе предопределяет большие пульсации момента на валу двигателя, что ведет к преждевременному износу приводного механизма и двигателя, а при использовании индукторного двигателя в качестве тягового провоцирует еще и боксование.
в большом диапазоне при постоянном токе предопределяет большие пульсации момента на валу двигателя, что ведет к преждевременному износу приводного механизма и двигателя, а при использовании индукторного двигателя в качестве тягового провоцирует еще и боксование.
Наиболее близким по технической сущности является способ управления индукторным двигателем, заключающийся в том, что формируют токи в двигателе, для чего измеряют периоды датчика положения ротора двигателя, внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают как минимум один импульс напряжения, определяют временной интервал подачи импульсов напряжения, разбивают его на т равных интервалов Δt, соответствующих углу поворота ротора ΔΘ, в каждом из которых вводят значение фазного тока in-1, соответствующее началу n-го интервала из m, формируют импульс напряжения амплитудой u от начала текущего n-го интервала до момента достижения фазным током величины in, определяемой по формуле

где М3(Θn) - заданное значение момента на n-м интервале;
L(Θn, in-1) - значение индуктивности в конце n-го интервала при токе in-1;
L(Θn-1, in-1) - значение индуктивности в конце (n-1)-го интервала при токе in-1;
in-1 - значение фазного тока в конце (n-1)-го интервала,
причем если в начале n-го интервала фазный ток больше значения in, то импульс напряжения не формируют (см. описание изобретения к патенту Российской Федерации RU 2229194 С2, кл. 7 Н 02 Р 8/18, опубл. 20.05.2004. Бюл. №14).
Этот способ имеет следующий недостаток. Значение индуктивности L(Θn, in-1), соответствующее концу n-го интервала, берется при значении фазного тока, соответствующего началу n-го интервала, что вносит ошибку в определение значения тока in, которой можно пренебрегать при малых частотах вращения индукторного двигателя и которая становится значительной на больших частотах вращения, когда частота пульсаций тока в фазных обмотках двигателя становится сравнимой с максимальной частотой переключения транзисторов, регулирующих фазные токи двигателя.
Кроме того, при этом способе управления достижение фазным током значения in определяет момент окончания импульса напряжения на фазной обмотке индукторного двигателя, поэтому до конца n-го интервала ток успевает уменьшиться и не соответствует необходимому в конце интервала значению in и необходимому для поддержания заданного момента двигателя изменению электромагнитной энергии. Поэтому среднее значение момента на интервале ΔΘ не соответствует заданному и предопределяет пульсации момента двигателя.
Задачей изобретения является снижение пульсаций момента индукторного двигателя за счет поддержания момента двигателя равным заданному на каждом из m интервалов.
Поставленная задача решается способом управления индукторным двигателем, при котором измеряют период сигнала датчика положения ротора, определяют временной интервал подачи импульсов управления внутри сигнала датчика положения ротора и разбивают его на m равных интервалов Δt, соответствующих углу поворота ротора ΔΘ. В начале каждого n-го из m интервалов вводят значение фазного тока индукторного двигателя in-1, подают на фазную обмотку постоянное напряжение и определяют значение фазного тока in в конце n-го интервала по формуле

где М3(Θn) - заданное значение момента на n-м интервале;
 - значение индуктивности в конце n-го интервала при токе
- значение индуктивности в конце n-го интервала при токе  ;
;
L(Θn-1, in-1) - значение индуктивности в конце (n-1)-го или в начале n-го интервала при токе in-1;
in-1 - значение фазного тока в конце (n-1)-го интервала,

где

и т.д. до

отсчитывают время τ, прошедшее от начала n-го интервала до достижения фазным током значения in, и через время

где 
r - активное сопротивление фазной обмотки;
L(Θn, in) - значение индуктивности в конце n-го интервала при токе in, снимают с фазной обмотки постоянное напряжение.
Если в начале n-го интервала фазный ток больше значения in, то импульс напряжения на фазную обмотку не подается.
Использование для определения фазного тока in в конце интервала индуктивности L(Θn, in-1) неправомерно, т.к. в конце интервала значение фазного тока не in-1, a in, поэтому значение L определяется в зависимости от Θn и значения in, которое последовательно уточняется в несколько приемов. Количество этих приемов (k) определяется необходимой точностью вычислений и тем больше, чем меньше число интервалов m. Для достижения точности вычисления значения in, соответствующей точности измерения фазного тока, достаточно повторить этот прием несколько раз. Например, на интервале подачи импульсов 0.01 с и при количестве переключении тока m=10, k=4, обеспечивая вычисление in с точностью 1,7%, что соответствует точности измерения 1.5%.
После достижения фазным током значения in к фазной обмотке продолжают прикладывать постоянное напряжение, так как если напряжение снять, то до окончания интервала ток снизится, значение его будет меньше in, а величина электромагнитной энергии  в конце n-го интервала будет меньше необходимой для обеспечения заданного значения момента
в конце n-го интервала будет меньше необходимой для обеспечения заданного значения момента

что предопределит пульсацию момента на валу индукторного двигателя.
Определение необходимого значения фазного тока in в конце интервала и времени окончания импульса постоянного напряжения на фазных обмотках индукторного двигателя по предлагаемому способу приводит к соответствию значения фазного тока необходимому значению в конце интервала и снижает пульсации момента индукторного двигателя.
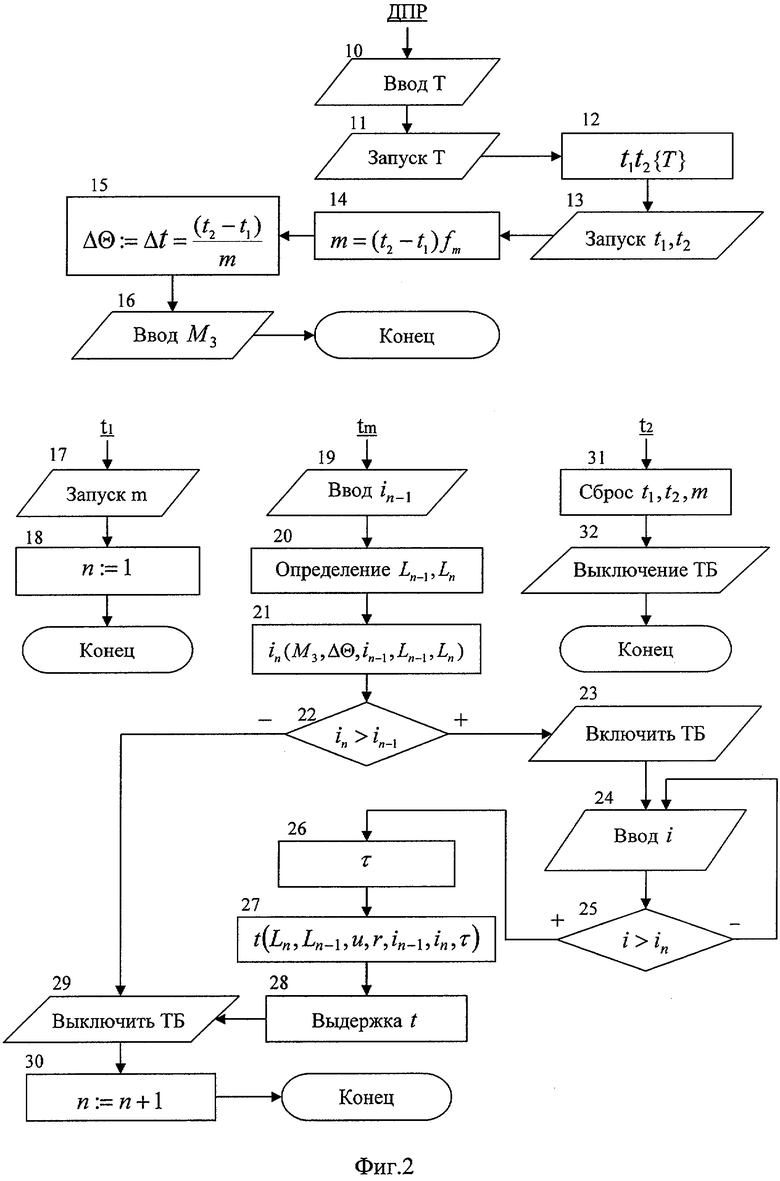
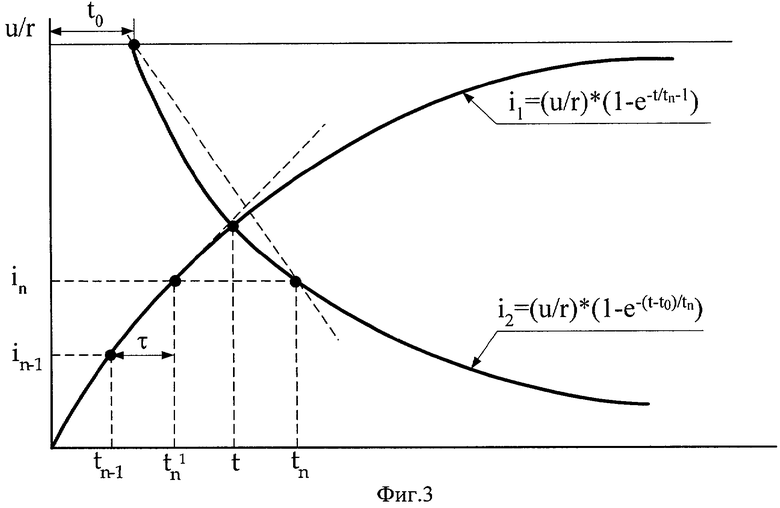
На фиг.1 представлено устройство для реализации способа; на фиг.2 - алгоритм работы устройства; на фиг.3 - временные диаграммы, поясняющие определение времени окончания импульса напряжения на фазной обмотке.
Способ осуществляется микропроцессорной системой, состоящей из блока таймеров 1, процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, аналогово-цифрового преобразователя (АЦП) 5, блока драйверов 6, транзисторного блока 7, управляющего индукторным двигателем 8, имеющего датчики положения ротора (ДПР) 9. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, входы блока таймеров 1, блока драйверов 6 и выход АЦП 5 объединены шиной адресов-данных 10. Выходы блока таймеров 1 и ДПР 9 соединены с шинами прерывания процессора 2. Ток i двигателя 8 поступает на вход АЦП 5. Выходы транзисторного блока 7, запитанного постоянным напряжением u, нагружены на обмотки индукторного двигателя 8.
Процессор, ОЗУ, ПЗУ, блок таймеров, АЦП могут быть интегрированы в специализированный контроллер, например M167-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037, Москва, Измайловская пл., 7).
Способ реализуется в соответствии с алгоритмом на фиг.2.
Алгоритм состоит их 4-х подпрограмм, которые запускают сигналами прерываний от ДПР 9 и блока таймеров 1 - t1, t2, tm.
Первая подпрограмма начинается по сигналу ДПР от ДПР 9. Вводят значение кода из таймера Т, соответствующее периоду сигнала ДПР (блок 10) и снова запускают таймер Т (блок 11). Затем определяют временной интервал от t1 до t2 (блок 12) и запускают таймеры t1 и t2 в блоке таймеров 1 (блок 13). В блоке 14 определяется количество интервалов m умножением величины временного интервала от t1 до t2 на значение максимально допустимой частоты переключения транзисторов транзисторного блока 7. Затем в блоке 15 определяют величину интервала Δt повторения определения необходимого значения тока in и соответствующий угол поворота ротора ΔΘ. Заканчивается подпрограмма вводом заданного значения момента М3 (блок 16).
Вторая подпрограмма начинается по приходу сигнала таймера t1, запущенного в первой подпрограмме.
В этой подпрограмме запускают таймер m интервала повторения вычислений (блок 17) и номеру интервала повторения вычислений присваивается значение единицы (блок 18).
Таймер m периодически выдает сигналы прерываний, по которым выполняется третья подпрограмма, в которой определяют необходимые значения тока двигателя на каждом интервале повторения вычислений. Для этого в блоке 19 вводят значение тока, соответствующее началу интервала. Затем в блоке 20 обновляют значения индуктивностей для вычисления нужного значения тока на этом интервале, которое определяют в блоке 21 в соответствии с формулой (1)

где М3(Θn) - заданное значение момента на n-м интервале;
 - значение индуктивности в конце n-го интервала при токе
- значение индуктивности в конце n-го интервала при токе  ;
;
L(Θn-1, in-1) - значение индуктивности в конце (n-1)-го или в начале n-го интервала при токе in-1;
in-1 - значение фазного тока в конце (n-1)-го интервала,
где
и т.д. до
В блоке 22 сравнивают вычисленную величину тока in, которой необходимо достичь на данном интервале, со значением тока in-1 в начале этого интервала, и если оно меньше, то транзисторы транзисторного блока 7 не включают (блок 27), а если больше, то на обмотку индукторного двигателя подают напряжение u включением соответствующих транзисторов транзисторного блока 7 (блок 23). В блоке 24 вводят текущее значение тока, которое сравнивают с вычисленным (блок 25); если ток не достиг заданного, процесс сравнения продолжают, а при достижении вычисленного значения фиксируют время τ (блок 26), прошедшее от начала n-го интервала, определяют по формуле (2) (блок 27) время t, отсчитывают это время (блок 28), после чего транзисторы транзисторного блока 7 выключают (блок 29), снимая с фазной обмотки постоянное напряжение u, и значение n увеличивают на единицу (блок 30), что соответствует следующему интервалу повторения вычислений.
Подача импульсов управления прекращается четвертой подпрограммой с приходом сигнала прерывания от таймера t2, при этом осуществляют сброс всех таймеров (блок 31) и выключают транзисторный блок 7 (блок 32).
Фиг.3 поясняет получение формулы (2). Кривая i1 описывает изменение фазного тока индукторного двигателя при подаче на фазную обмотку напряжения u в момент tn-1 при значении тока фазы in-1. Ток изменяется по экспоненте  с постоянной времени
с постоянной времени  и в момент времени t′n достигает значения in, определенного по формуле (1),
и в момент времени t′n достигает значения in, определенного по формуле (1),
Если в этот момент прекратить подачу напряжения u, то до конца n-го интервала ток спадет и будет меньше in, а значение момента индукторного двигателя станет меньше М3.
Время t прекращения подачи напряжения на фазную обмотку определяется так, чтобы ток в конце n-го интервала был равен in, для чего экспонента i1 заменяется прямой, проходящей через точки с координатами (tn-1,in-1) и (t′n,in) (см. фиг.3).
С момента t снятия напряжения фазный ток будет убывать по экспоненте  с постоянной времени
с постоянной времени  и к окончанию n-го интервала должен достичь значения in.
и к окончанию n-го интервала должен достичь значения in.
Значение t0 определится при i2=in и t=tn
Эту экспоненту можно заменить прямой, проходящей через точки с координатами  и (tn, in) (см. фиг.3).
и (tn, in) (см. фиг.3).
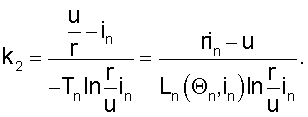
Уравнения прямых запишутся
В момент t i1=i2, отсюда время окончания импульса напряжения
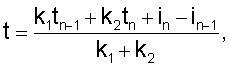
где 
Обозначим время от начала интервала до первого достижения током значения in (см. фиг.3).
 тогда
тогда 
Далее  и
и
Время от момента первого достижения током значения in до окончания подачи напряжения

где 
τ - время, фиксируемое от начала n-го интервала до момента достижения током значения in,
Δt - длина одного из m интервалов, соответствующая ΔΘ.
Предлагаемый способ позволяет более точно определить необходимое значение тока и соответствующее ему значение индуктивности фазной обмотки двигателя в конце интервала подачи импульса напряжения, тем самым снизив пульсации момента двигателя в среднем в 2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2297091C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ТЯГОВОГО ИНДУКТОРНОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2315419C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2251788C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294049C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2004 |
|
RU2282300C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
Изобретение относится к области электротехники и может быть использовано для управления асинхронными двигателями, в том числе тяговыми. Техническим результатом является обеспечение оптимального режима во всем диапазоне частоты вращения ротора при практически постоянных коэффициенте мощности, коэффициенте перегружаемости и абсолютном скольжении. В способе управления асинхронным двигателем частоту напряжения асинхронного двигателя определяют как сумму частоты вращения ротора и его оптимального скольжения. Оптимальное скольжение и величину заданного значения напряжения U определяют в зависимости от сигнала МЗ с выхода регулятора напряжения, соответствующего заданному электромагнитному моменту асинхронного двигателя, номинального электромагнитного момента МН асинхронного двигателя, номинальной синхронной частоты f1Н вращения асинхронного двигателя, номинальной частоты f2Н вращения асинхронного двигателя и номинального значения напряжения UН асинхронного двигателя по определенным формулам. 3 ил.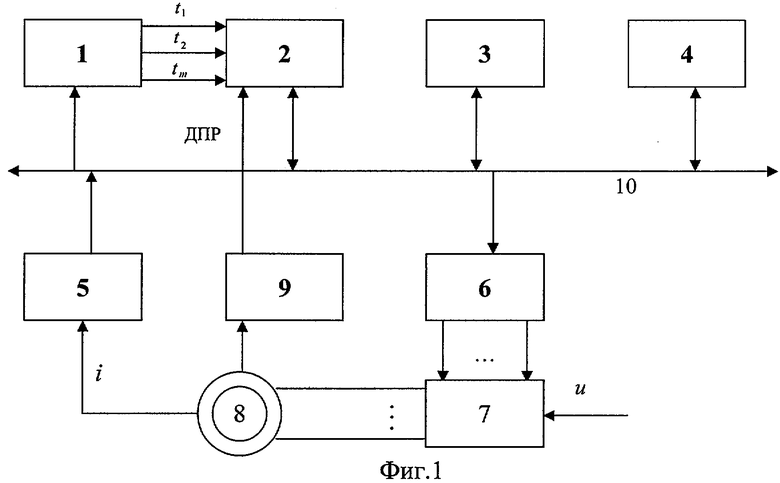
Способ управления индукторным двигателем, заключающийся в том, что формируют токи в двигателе, для чего измеряют периоды сигнала датчика положения ротора двигателя, внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают как минимум один импульс напряжения, определяют временной интервал подачи импульсов напряжения, разбивают его на m равных интервалов Δt, соответствующих углу поворота ротора ΔΘ, в каждый из которых вводят значение фазного тока in-1, соответствующее началу текущего n-го интервала из m, если в начале n-го интервала фазный ток больше значения in, то импульс напряжения не подают, отличающийся тем, что в начале n-го интервала подают на фазную обмотку двигателя постоянное напряжение и при достижении фазным током значения

где М3(Θn) - заданное значение момента на n-м интервале;
L(Θn,in (k)) - значение индуктивности в конце n-го интервала при токе in (k);
L(Θn-1, in-1) - значение индуктивности в конце (n-1)-го или в начале n-го интервала при токе in-1;
in-1 - значение фазного тока в конце (n-1)-го интервала,

где

отсчитывают время τ, прошедшее от начала n-го интервала до достижения фазным током значения in и через время
где 
r - активное сопротивление фазной обмотки;
L(Θn, in) - значение индуктивности в конце n-го интервала при токе in,
снимают с фазной обмотки постоянное напряжение.
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| КАТАЛИЗАТОР ГИДРООЧИСТКИ НЕФТЯНЫХ ФРАКЦИЙ И СПОСОБ ЕГО ПРИГОТОВЛЕНИЯ | 1999 |
|
RU2159672C1 |
| US 4707650 А, 17.11.1987 | |||
| DE 3826892 А1, 12.03.1989 | |||
| JP 62272851 A, 27.11.1987 | |||
| Шихта для наплавки | 1974 |
|
SU500950A1 |

