Изобретение относится к области машиностроения и может быть использовано в системах управления подачей рабочего тела, например, на нефте- и газопроводах, в исполнительных приводах летательных аппаратов, технологических машин и др.
Нередко при управлении подачей жидкостей и газов возникает задача быстрого открытия запорно-регулирующего органа (ЗРО), например заслонки или шарового крана, на станциях перекачки нефте- и газопроводов, затем высокоточного регулирования заданных параметров (давления или расхода) с существенно меньшими скоростями и быстрого закрытия ЗРО по окончании или при прерывании технологического процесса. При этом кратковременно развиваемая мощность при преодолении существенных нагрузок (в основном сил трения и гидродинамических сил в ЗРО) с большими скоростями в процессе открытия и закрытия ЗРО нередко более чем на порядок превышает длительно развиваемую мощность в процессе плавного регулирования параметров. Использование одного типа привода, например высокоточного цифрового или шагового электропривода, во всем диапазоне условий эксплуатации требует производить выбор приводного электродвигателя и редуктора по пиковым режимам работы. Тогда для основного длительного режима мощность, габариты и масса привода оказываются существенно завышенными. Кроме того, это приводит к завышенным габаритам и массе электронного блока, необходимого для коммутации больших токов в фазных обмотках электродвигателя, так как требует применения мощных силовых транзисторов, устанавливаемых для отвода выделяемой в тепло энергии на громоздких радиаторах, а возможно и применения принудительной вентиляции.
Решение указанной задачи при помощи только электрогидравлического привода по условию высокой точности позиционирования на основном режиме требует применения, например, многоразрядного цифрового привода с прецизионными разрядными электрогидравлическими усилителями мощности и сложным гидромеханическим суммирующим механизмом. Конструктивная сложность такого привода, а следовательно, и его стоимость существенно превысят сложность и стоимость электропривода на аналогичные условия работы. Использование же газа в качестве рабочего тела при наличии инерционной нагрузки вообще не представляется возможным из-за свойственных газовым приводам большого времени запаздывания, неплавности движения выходного звена силового механизма и значительных величин перерегулирования переходных процессов вследствие большой сжимаемости газа.
Одним из решений поставленной задачи является использование на пиковых режимах при открытии и закрытии ЗРО энергии газа или жидкости под давлением с подводом и отводом рабочего тела в полости силового механизма при помощи двухпозиционного распределителя, а на основном режиме плавного регулирования параметров - маломощного высокоточного электропривода, например, описанного в [1] . Комбинирование двух типов приводов повышает надежность системы, так как имеется два канала (дублирование) в случае необходимости аварийного закрытия ЗРО.
Известен силовой механизм-аналог, описанный в [2], представляющий собой неполноповоротный гидродвигатель, содержащий корпус, вал с лопастью, неподвижную перегородку и уплотнения. Такой силовой механизм имеет только гидравлический вход и не позволяет реализовать высокоточное позиционирование выходного вала.
В качестве силового механизма-прототипа выбран неполноповоротный гидравлический силовой механизм, содержащий ротор в виде выходного вала с лопастью, статор с ограничителями поворота ротора и каналами для подвода и отвода рабочего тела к рабочим полостям, уплотнительную перемычку [3].
Недостатком силового механизма-прототипа является одновременное выполнение статором силозамыкающей функции корпуса, что не позволяет использовать такой силовой механизм в комбинированной системе, например, совместно с высокоточным следящим электроприводом из-за невозможности осуществления кинематической развязки валов обоих типов приводов.
Техническим результатом настоящего изобретения является расширение функциональных возможностей силового механизма и повышение его надежности.
Технический результат достигается тем, что в известном неполноповоротном гидравлическом силовом механизме, содержащем ротор в виде выходного вала с лопастью, статор с ограничителями поворота ротора и каналами для подвода и отвода рабочего тела к рабочим полостям, уплотнительную перемычку, статор установлен в корпусе с возможностью поворота относительно корпуса, на внутренней поверхности корпуса выполнен паз с ограничителями поворота статора, при этом на наружной поверхности статора выполнен выступ, размещенный внутри паза корпуса, а ограничители поворота статора выполнены под углом, определяемым из соотношения
α = ϕ - γ + β,
где ϕ - угол между ограничителями поворота ротора;
γ - угол между поверхностями лопасти в плоскостях, проходящих через точки взаимодействия с ограничителями поворота ротора;
β - угол между поверхностями выступа статора в плоскостях, проходящих через точки взаимодействия с ограничителями поворота статора,
при этом на статоре выполнены элементы подключения устройства передачи вращательного момента.
На чертеже показан пример выполнения неполноповоротного гидравлического силового механизма. Цифрами обозначены:
1 - корпус;
2 - статор;
3 - выходной вал;
4 - паз в корпусе;
5, 6 - ограничители поворота статора;.
7 - выступ статора;
8 - лопасть;
9, 10 - ограничители поворота ротора;
11, 12 - рабочие полости;
13, 14 - каналы для подвода и отвода рабочего тела к рабочим полостям;
15 - уплотнительная перемычка;
16 - крышка;
17, 18, 19 - подшипники;
20 - уплотнение;
21 - входной вал статора.
Силовой механизм выполнен в виде моментного гидроцилиндра. Внутри корпуса 1 на подшипнике 18 установлен статор 2, имеющий входной вал 21, на котором могут быть выполнены элементы для подключения устройства передачи вращательного момента, например шлицы, шпонка, зубчатое колесо и т.д. В корпусе 1 выполнен паз 4 и ограничители поворота статора 5 и 6. Внутрь паза 4 введен выступ статора 7. Таким образом, статор 2 имеет возможность поворота на угол до θ
Рассмотрим работу неполноповоротного гидравлического силового механизма. Для определенности примем за исходное положение исполнительных элементов силового механизма положение, показанное на фиг.1: выступ 7 статора 2 через входной вал 21 прижат, например, при помощи электропривода к ограничителю поворота статора 6, а лопасть 8 прижата к ограничителю поворота ротора 10 вследствие подключения рабочей полости 11 через канал 13 к магистрали высокого давления рабочего тела, например, через внешний распределитель и рабочей полости 12 через канал 14 к магистрали низкого давления рабочего тела.
При отключении рабочей полости 12 от магистрали низкого давления и подключении ее к магистрали высокого давления рабочего тела и одновременном отключении рабочей полости 11 от магистрали высокого давления и подключении ее к магистрали низкого давления на лопасти 8 формируется перепад давления, обуславливающий вращение ротора относительно статора по направлению от ограничителя поворота ротора 10 к ограничителю поворота ротора 9. Так как выступ статора прижат к ограничителю поворота статора 6, то происходит вращение выходного вала 3 силового механизма относительно корпуса 1 на полный угол θ2 = ϕ-γ. При этом происходит, например, полное открытие ЗРО объекта управления. Сформированный и удерживаемый перепад давления между рабочими полостями 12 и 11 обеспечивает постоянное поджатие лопасти 8 к ограничителю поворота ротора 9. При этом передаваемые затем движения, например, от высокоточного электропривода через входной вал 21 на статор 2 приводят к совместному вращению статора и ротора (выходного вала 3) относительно корпуса 1 на углы θ1, задаваемые электроприводом в процессе высокоточного регулирования положения ЗРО объекта управления, вплоть до полного его закрытия при достижении угла θ1 = θ
Скорость вращения выходного вала силового механизма при работе от электропривода определяется механической характеристикой приводного электродвигателя, а скорость вращения выходного вала при переключении направления действия перепада давления в рабочих полостях определяется размерами дросселирующих отверстий во внешнем распределителе и может быть существенно большей, чем скорость от электропривода. Таким образом, может быть реализовано быстрое открытие и закрытие ЗРО объекта управления и плавное высокоточное регулирование его параметров на основном длительном режиме. При этом мощность, развиваемая электроприводом, может быть существенно меньше мощности, требуемой для реализации режимов открытия и закрытия ЗРО. Так как при помощи изменения перепада давления на лопасти происходит не следящее движение, а вращение от упора до упора, то в качестве рабочего тела может быть использована как жидкость, так и газ, что существенно расширяет эксплуатационные возможности заявляемого силового механизма.
Литература
1. Белицкий Д. С., Жарков М.Н., Стоялов В.В. и др. Электромеханический привод в системе управления режимами жидкостных ракетных двигателей// Известия академии наук. Теория и системы управления, 1996, N 1, с. 118-124.
2. Свешников В. К., Усов А.А. Станочные гидроприводы. Справочник. -М.: Машиностроение, 1982.
3. Башта Т.М. Гидропривод и гидропневмоавтоматика. -М.: Машиностроение, 1972.
4. Гидравлика, гидромашины и гидроприводы: учебник для машиностроительных вузов/Т.М.Башта, С.С.Руднев, Б.Б.Некрасов и др. М.: Машиностроение, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РЕЖИМОМ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2119186C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1992 |
|
RU2079721C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАСХОДА | 1994 |
|
RU2095639C1 |
| ПРИВОД | 1995 |
|
RU2094677C1 |
| КРЫШКА ЛЮКА СИСТЕМЫ ТЕРМОСТАТИРОВАНИЯ | 1995 |
|
RU2094308C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2067226C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ВЫПОЛНЕНИИ ПРОГРАММНОГО РАЗВОРОТА | 1995 |
|
RU2098325C1 |
| ГЕРМЕТИЧНЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1996 |
|
RU2118713C1 |
| РУЛЕВАЯ МАШИНА | 1994 |
|
RU2083947C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2116943C1 |
Неполноповоротный гидравлический силовой механизм относится к области машиностроения и может быть использован в системах управления подачей рабочего тела, например, на нефте- и газопроводах, в исполнительных приводах летательных аппаратов, технологических машин и др. Силовой механизм содержит ротор, статор, уплотнительную перемычку. Ротор выполнен в виде выходного вала с лопастью. Статор выполнен с ограничителями поворота ротора и каналами для подвода и отвода рабочего тела к рабочим полостям. Статор установлен в корпусе с возможностью поворота относительно корпуса. На внутренней поверхности корпуса выполнен паз с ограничителями поворота статора. На наружной поверхности статора выполнен выступ, размещенный внутри паза корпуса. Ограничители поворота статора выполнены под углом, определяемым из соотношения: α = ϕ -γ + β, где ϕ - угол между ограничителями поворота ротора; γ - угол между поверхностями лопасти в плоскостях, проходящих через точки взаимодействия с ограничителями поворота ротора; β - угол между поверхностями выступа статора в плоскостях, проходящих через точки взаимодействия с ограничителями поворота статора. На статоре выполнены элементы подключения устройства передачи вращательного момента. Изобретение позволяет повысить надежность и расширить функциональные возможности механизма. 1 ил.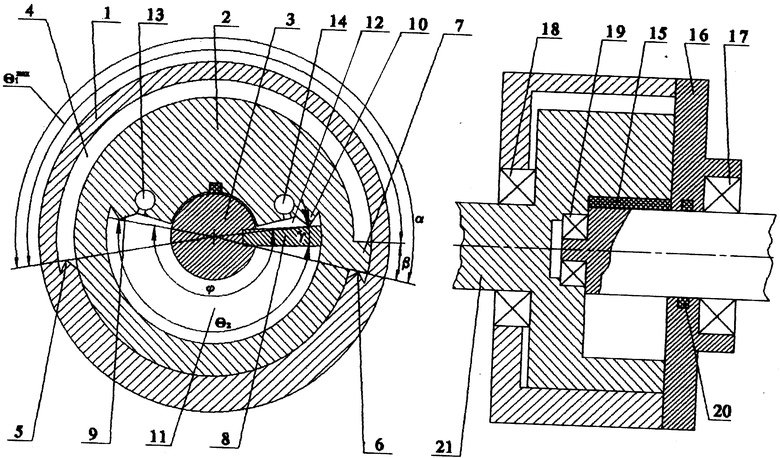
Неполноповоротный гидравлический силовой механизм, содержащий ротор в виде выходного вала с лопастью, статор с ограничителями поворота ротора и каналами для подвода и отвода рабочего тела к рабочим полостям, уплотнительную перемычку, отличающийся тем, что в нем статор установлен в корпусе с возможностью поворота относительно корпуса, на внутренней поверхности корпуса выполнен паз с ограничителями поворота статора, при этом на наружной поверхности статора выполнен выступ, размещенный внутри паза корпуса, а ограничители поворота статора выполнены под углом, определяемым из соотношения
α = ϕ-γ+β,
где ϕ - угол между ограничителями поворота ротора;
γ - угол между поверхностями лопасти в плоскостях, проходящих через точки взаимодействия с ограничителями поворота ротора;
β - угол между поверхностями выступа статора в плоскостях, проходящих через точки взаимодействия с ограничителями поворота статора,
при этом на статоре выполнены элементы подключения устройства передачи вращательного момента.
| Башта Т.М | |||
| Гидропривод и гидропневмоавтоматика - М.: Машиностроение, 1972, с.62 | |||
| Свешников В.К., Усов А.А | |||
| Станочные гидроприводы | |||
| Справочник | |||
| - М.: Машиностроение, 1982 | |||
| Поворотны% гидравлический двигатель | 1972 |
|
SU514124A1 |
| НЕПОЛНОПОВОРОТНЫЙ ЛОПАСТНОЙ ГИДРОДВИГАТЕЛЬ | 0 |
|
SU287521A1 |
| DE 3942775 A1, 27.06.91 | |||
| Устройство для автоматического определения времени фильтрования | 1988 |
|
SU1546106A1 |
