Изобретение относится к машиностроению и может быть использовано в системах управления подачей рабочего тела, например в системах управления режимом жидкостного ракетного двигателя (ЖРД), где для поворота органов регулирования тяги используются электромеханические приводы.
Системы управления режимом перспективных мощных ЖРД имеют следующие особенности по сравнению с более ранними поколениями ЖРД: регулируемый запуск и останов ЖРД наряду с обеспечением высокой точности отработки управляющих сигналов по выходному валу привода, повышенный противодействующий момент на выходном валу привода, высокая скорость поворота выходного вала привода при запуске и останове ЖРД и существенно меньшая скорость при работе на основном режиме.
Известна система управления-аналог, предназначенная для управления режимом работы двигателя второй ступени РН "Энергия" [1]. Это устройство представляет собой цифровую следящую систему (ЦСС), которая содержит ЦВМ, работающую в параллельном двоичном семиразрядном коде, усилительно-преобразующее устройство (УПУ), электромеханический привод, включающий электродвигатель, редуктор и три дискретных датчика обратной связи.
В этой цифровой следящей системе привод замкнут обратной связью через ЦВМ, а ЦВМ одновременно выполняет функции задающего устройства и элемента сравнения (неавтономная ЦСС [2]). Работа системы осуществляется путем сравнения управляющих кодов, вырабатываемых ЦВМ и кодов положения выходного вала привода, поступающих от датчиков обратной связи, при этом останов вала привода происходит при совпадении этих кодов. Недостатком этой системы является ограниченная возможность по созданию быстродействующих приводов, т.к. скорость сравнения кодов определяется сравнительно низкой частотой поступающей из ЦВМ информации (внутренний такт квантования ЦВМ для второй ступени РН "Энергия" составлял 0,2 с). При этом из-за несовпадения кодов в требуемый момент времени могут иметь место "выбеги" или перерегулирование с забросом вала за уровень, определяемый дискретностью команды, т.е. не будут обеспечиваться требования по качеству переходного процесса.
Известна также система - прототип, описанная в [1], которая содержит блок задания сигнала управления запуском, блок задания сигнала управления выключением, блок задания сигнала управления работой на основном режиме, связанные своими выходами соответственно с блоком разрешения режима запуска, блоком разрешения режима выключения, блоком разрешения основного режима, при этом вторые входы блока разрешения режима запуска, блока разрешения режима выключения, блока разрешения основного режима связаны с тремя выходами блока сравнения времени, три входа которого соответственно связаны с выходами блока задания времени запуска, блока задания времени основного режима работы, блока задания времени выключения, пятый вход блока сравнения времени - с блоком задания бортового времени, выход блока определения сигнала рассогласования соединен с блоком управления включением и остановом электродвигателя, выход которого связан с усилительно-преобразующим устройством, выход которого связан с электродвигателем, связанным с редуктором, а также датчик обратной связи, выход которого связан с одним из входов блока определения сигнала рассогласования.
В этой системе функции устройства сравнения и управления электродвигателем выполняет автономное вычислительное устройство (АВУ), работающее с собственным тактом квантования, независимо по отношению к блокам задания сигналов управления (автономная ЦСС [2]). Так как частота сравнения управляющих кодов и кодов, поступающих от датчиков обратной связи приводов, может быть существенно выше, чем частота выдачи управляющих кодов от блоков задания сигналов управления, то возможности по созданию быстродействующих прецизионных систем существенно повышаются по сравнению с системой, принятой за аналог.
Однако область применения таких систем для перспективных мощных ЖРД также ограничена, поскольку наряду с высокой точностью и быстродействием приводы должны развивать на своем валу достаточно большие моменты ля преодоления сопротивления повороту органов регулирования тяги. В связи с этим в приводах должны использоваться электродвигатели большой мощности, в обмотках которых протекают большие пусковые и рабочие токи. В свою очередь это требует увеличения мощности и массы устройств, коммутирующих обмотки электродвигателя, бортового источника электропитания и массы бортовой кабельной сети.
В то же самое время в соответствии с типовыми циклограммами работы приводов в составе ЖРД (фиг. 1) можно выделить три наиболее характерных участка по времени их функционирования: установка начального положения (t0-t1), запуск (t1- t2), основная работа (t2-t3) и останов (t3-t4). При этом участки запуска и останова, где приводы должны развивать повышенную скорость, следовательно, потреблять повышенную мощность от бортового источника электропитания, характерны своей кратковременностью по сравнению с участком основной работы ЖРД. В связи с этим использование цифровых следящих систем, имеющих в качестве исполнительных элементов мощные электродвигатели на всех указанных участках, является энергетически неоправданным.
Техническим результатом настоящего изобретения является снижение затрат электроэнергии на управление приводом и, как следствие, уменьшение массы бортового источника электропитания, бортовой кабельной сети и устройств сопряжения электродвигателя с блоком управления.
Технический результат достигается тем что в известную систему управления режимом ЖРД, содержащую блок задания сигнала управления запуском, блок задания сигнала управления выключением, блок задания сигнала управления работой на основном режиме, связанные своими выходами соответственно с блоком разрешения режима запуска, блоком разрешения режима выключения, блоком разрешения основного режима, при этом вторые входы блока разрешения режима запуска, блока разрешения режима выключения, блока разрешения основного режима связаны с тремя выходами блока сравнения времени, три входа которого соответственно связаны с выходами блока задания времени запуска, блока задания времени основного режима работы, блока задания времени выключения, пятый вход блока сравнения времени - с блоком задания бортового времени, выход блока определения сигнала рассогласования соединен с блоком управления включением и остановом электродвигателя выход которого связан с усилительно-преобразующим устройством, выход которого связан с электродвигателем, связанным с редуктором, а также датчик обратной связи, выход которого связан с одним из входов блока определения сигнала рассогласования, введены неполноповоротный газовый силовой механизм с элементами подключения к выходному звену редуктора, электропневмоклапан запуска и выключения, блок коммутации сигнала запуска, блок коммутации сигнала выключения, блок переключения режимов, блок задания времени установки начального положения, блок задания сигнала управления начальным положением, блок разрешения установки начального положения, при этом выходы блока разрешения режима запуска и блока разрешения режима выключения соединены соответственно с входами блока коммутации сигнала запуска и блока коммутации сигнала выключения, выходы блока коммутации сигнала запуска и блока коммутации сигнала выключения связаны с электрическим входом электропневмоклапана запуска и выключения, выходные магистрали которого связаны с рабочими полостями неполноповоротного газового силового механизма выход блока задания времени установки начального положения связан с четвертым входом блока сравнения времени, выход блока задания сигнала установки начального положения связан с входом блока разрешения установки начального положения, второй вход которого связан четвертым выходом блока сравнения времени, входы блока переключения режимов связаны с выходами блока разрешения основного режима и блока разрешения установки начального положения, выход блока переключения режимов связан со вторым входом блока определения сигнала рассогласования, а выход неполноповоротного газового силового механизма связан с датчиком обратной связи.
Таким образом, благодаря данному техническому решению обеспечивается разгрузка электродвигателя привода на наиболее энергоемких участках работы системы управления приводом, что позволяет использовать в ней относительно маломощные электродвигатели и соответственно применять маломощные устройства управления и электропитания.
Осуществление заявленного технического решения поясняется с помощью фиг. 2,3,4.
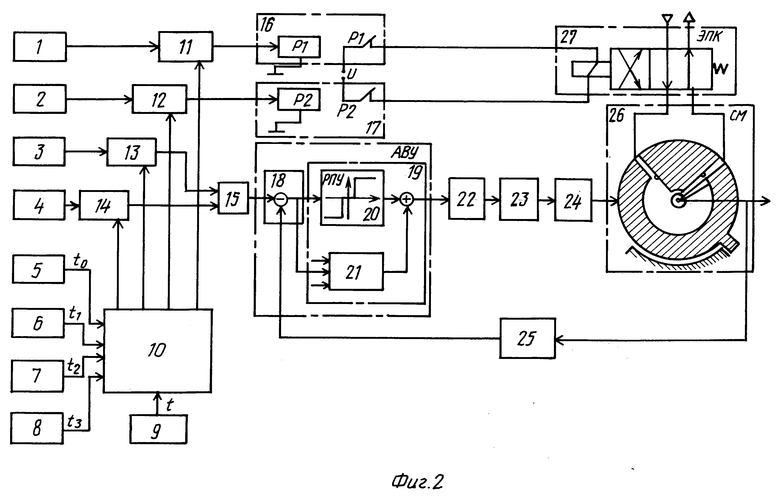
На фиг. 2 показан пример блок-схемы системы управления режима ЖРД.
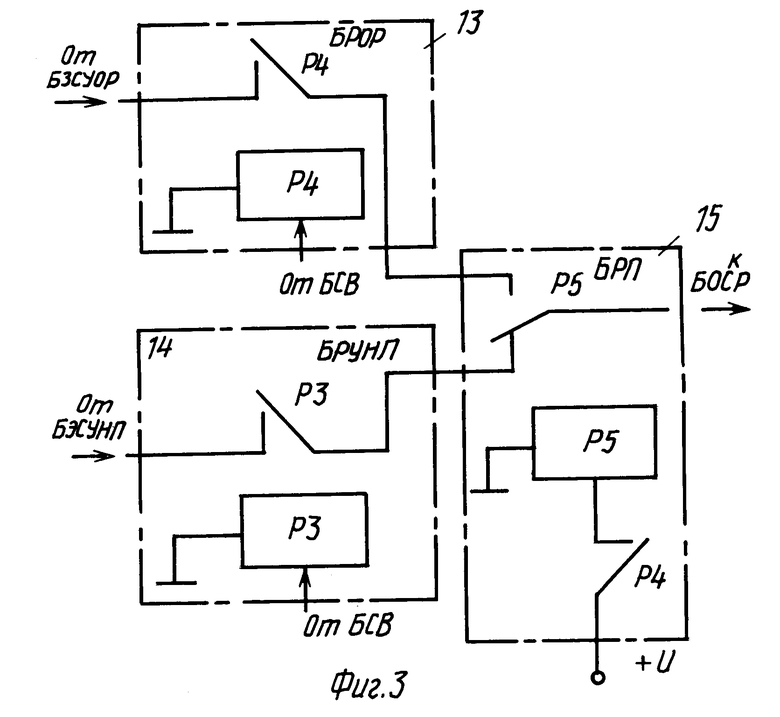
На фиг. 3 показана возможная схема реализации блока разрешения основного режима БРОР, блока разрешения установки начального положения БРУНП, блока переключения режимов БПР.
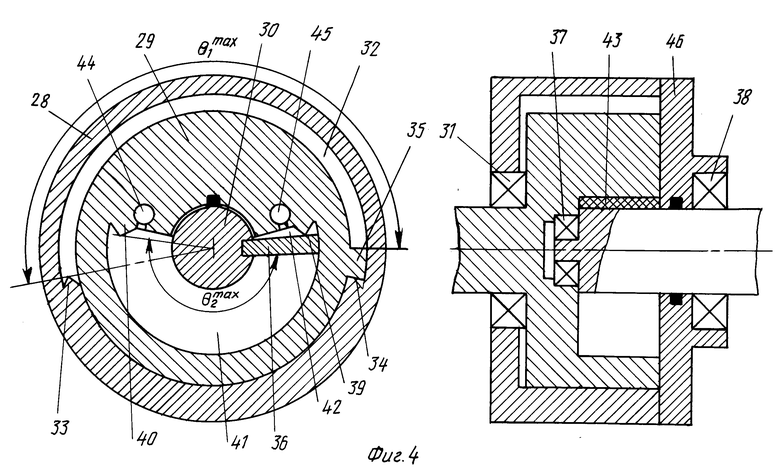
На фиг. 4 представлен пример реализации неполноповоротного газового силового механизма.
На блок-схеме (фиг. 2) цифрами обозначены:
1 - блок задания сигнала управления запуском БЗСУЗ;
2 - блок задания сигнала управления выключением БЗСУВ;
3 - блок задания сигнала управления работой на основном режиме БЗСУОР;
4 - блок задания сигнала управления начальным положением БЗСУНП;
5 - блок задания времени установки начального положения БЗВУНП;
6 - блок задания времени запуска БЗВЗ;
7 - блок задания времени основного режима работы ВЗВОР;
8 - блок задания времени выключения БЗВВ;
9 - блок задания бортового времени БЗБВ;
10 - блок сравнения времени БСВ;
11 - блок разрешения режима запуска БРРЗ;
12 - блок разрешения режима выключения БРРВ;
13 - блок разрешения основного режима БРОР;
14 - блок разрешения установки начального положения БРУНП;
15 - блок переключения режимов БПР;
16 - блок коммутации сигнала запуска БКСЗ;
17 - блок коммутации сигнала выключения БКСВ;
18 - блок определения сигнала рассогласования БОСР;
19 - блок управления включением и остановом электродвигателя БУВОД;
20 - релейно-переключающее устройство РПУ;
21 - блок формирования импульсов БФИ;
22 - усилительно-преобразующее устройство УПУ;
23 - электродвигатель ЭД;
24 - редуктор Р;
25 - датчик обратной связи ДОС;
26- неполноповоротный газовый силовой механизм СМ;
27 - электропневмоклапан запуска и выключения далее электропневмоклапан или ЭПК;
Блоки задания сигналов управления (БЗСУЗ 1, БЭСУВ 2, БЗСУОР 3) своими выходами связаны соответственно блоками разрешения режимов (БРРЗ 11, БРРВ 12, БРОР 13), вторые входы последних связаны с тремя выходами БСВ 10. Три входа БСВ связаны с выходами БЗВЗ 6, БЗВОР 7, БЗВВ 8, а пятый вход - с БЗБВ 9. Выход БОСР 18 соединен с РПУ 20 и с одним из входов БФИ 21, входящих в состав БУВОД 19. Выходы БФИ и РПУ через сумматор связаны с УПУ 22, выход которого связан с ЭД 23. Выходной вал электродвигателя связан с редуктором 24, выходное звено которого жестко соединено с подвижным статором СМ 26. Выходной вал СМ связан с ДОС 25, выход которого связан с одним из входов БОСР 18.
Выходы БРРЗ 11 и БРРВ 12 соединены соответственно со входами БКСЗ 16 и БКСВ 17, выходы которых связаны с электрическим входом ЭПК 27. Выходные магистрали ЭПК связаны с рабочими полостями СМ 26. Выход БЗВУНП 5 связан с четвертым входом БСВ 10, выход БЗСУНП 4 связан с входом БРУНП 14, второй вход которого связан с четвертым входом БСВ. Входы БПР 15 связаны с выходами БРОР 13 и БРУНП 14, выход БПР связан со вторым входом БОСР.
Блоки задания сигналов управления (БЗСУЗ, БЗСУВ, БЗСУОР, БЗСУНП) могут быть выполнены на базе известных элементов, на выходе которых образуется электрический сигнал в виде двоичного параллельного кода, например, на базе аналогово-цифровых преобразователей (АЦП). Блоки задания времени (БЗВУНП, БЗВЗ, БЗВОР, БЗВВ) могут быть реализованы в виде известных программно-временных устройств (таймеров). Блоки разрешения режимов (БРРЗ, БРРВ, БРОР, БРУНП) могут быть выполнены в виде логических элементов И. Пример реализации блоков коммутации сигналов запуска и выключения (БКСЗ, БКСВ) показан на фиг. 2. БКСЗ 16 и БКСВ 17 выполнены на базе реле Р1 и Р2. В исходном состоянии контакт реле Р1 разомкнут, а контакт реле Р2 замкнут. Входы реле Р1 и Р2 связаны с выходами соответственно БРРЗ 11 и БРРВ 12, а их выходы через источник питания U с напряжением, например, 27 В, связаны с обмоткой ЭПК 27.
Одна из возможных схем реализации блоков разрешения (БРОР, БРУНП) и блока переключения режимов (БПР), показана на фиг. 3. БРОР 13 и БРУНП 14 выполнены на базе реле Р3 и Р4, входы которых связаны соответственно с БЗСУОР 3 и БЗСУНП 5, а выходы с БПР 15, выполненным на базе реле Р5. Выход БПР связан с БОСР 18. В исходном состоянии контакты реле Р3 и Р4 разомкнуты, а контакт реле Р5 замкнут на выход блока БРУНП 14. При поступлении сигналов в момент t0 от БЗСУНП 4 и от БСВ 10 происходит замыкание контакта реле Р3 и сигнал управления проходит на БОСР. При поступлении в момент t2 сигналов от БЗСУОР 3 и БСВ 10 происходит замыкание обоих контактов реле 4, при этом срабатывает реле Р5, и его контакт перебрасывается во второе положение, отключая выход блока БРУНП от линии, идущей к БОСР, и подключая к ней выход блока БРОР. Таким образом, сигнал, идущий от БЗСУНП к БОСР, отключается, а сигнал управления от БЗСУОР проходит на БОСР через замкнутые контакты реле Р4 и Р5.
Реализация БКСЗ и БКСВ, а также БРУНП, БРОР, БПР для простоты понимания представлена на релейных элементах; как вариант, эти блоки могут быть выполнены на бесконтактных электронных ключах. Возможный вариант реализации блока определения сигнала рассогласования (БОСР), блока управления включением и остановом электродвигателя (БУВОД), усилительно-преобразующего устройства (УПУ) представлен в материалах [3] в виде блоков, выполняющих аналогичные функции. Датчик обратной связи (ДОС) может быть выполнен, например, в виде цифрового датчика угла.
Неполноповоротный газовый силовой механизм (фиг. 4) выполнен в виде моментного пневмоцилиндра [4] и содержит корпус 28 с установленными внутри него статором 29 и ротором 30. Статор установлен в корпус с возможностью поворота относительно него с помощью подшипника 31. На внутренней поверхности корпуса выполнен паз 32 с упором 33 исходного положения и упором 34 конечного положения, которые ограничивают угол поворота статора. На наружной поверхности статора установлен ограничитель 35, размещенный внутри паза корпуса и взаимодействующий с упорами 33 и 34. Ротор 30 выполнен в виде выходного вала с лопастью 36 и установлен в подшипниках 37 и 38. Положение ротора ограничено упором 39 исходного положения и упором 40 конечного положения, выполненными на внутренней поверхности статора 29. Полный угол поворота статора θ
Рабочие полости 41 и 42 статора разделены лопастью 36 и уплотнительным элементом 43, а подвод и отвод рабочего тела к рабочим полостям от электропневмоклапана 27 осуществляется через отверстия 44 и 45, выполненные в статоре 29. Выходной вал выведен через крышку 46 и имеет элементы присоединения к органу регулирования тяги ЖРД. На торцевой поверхности статора, противоположной выходному валу, выполнены элементы присоединения к выходному звену редуктора Р электропривода.
ЭПК 27 выполнен в виде двухпозиционного четырехходового распределителя с электрическим управлением и пружинным возвратом (фиг. 2). Газовый вход ЭПК связан с магистралью газа высокого давления, газовый выход - с линией выхлопа, а рабочие магистрали с СМ 26. Электрический вход ЭПК одним концом своей обмотки связан с БКСЗ 16, а вторым концом связан с БКСВ 17.
Рассмотрим работу системы управления режимом ЖРД в соответствии с циклограммой фиг. 1.
Началу запуска ЖРД предшествует операция приведения СМ 26 в начальное положение, которое соответствует нахождению статора 29 (фиг.4) на упоре 34 конечного положения, а ротора 30 на опоре 39 исходного положения. В этому случае при совпадении в БСВ 10 текущего бортового времени t со временем t0, соответствующим началу установки электропривода в начальное положение и вырабатываемым БЗВУНП 5, БРУНП 14 пропускает на БПР 15 сигнал управления начальным положением, вырабатываемый БЗСУНП 4 в виде кода, соответствующего углу поворота вала электродвигателя, а следовательно, и связанного с ним статора 29, на упор конечного положения. Электродвигатель, отрабатывая входной код, поворачивает вал редуктора 24 вместе со статором 29 на полный угол θ
Напряжение на обмотке электропневмоклапана 27 в это время отсутствует из-за разомкнутого контакта реле Р1 и ЭПК, соединяя левую рабочую полость 41 с магистралью газа высокого давления и правую рабочую полость 42 с линией выхлопа, прижимает лопасть ротора к упору 39 исходного положения.
При совпадении в БСВ 10 текущего бортового времени t c временем запуска ЖРД t1 БЗСУЗ 1 выдает через БРРЗ 11 сигнал управления запуском в виде управляющего напряжения, которое вызывает срабатывание контакта реле Р1 БКСЗ 16 и замыкает электрическую цепь, связывающую источник питания U с обмоткой электропневмоклапана 27. При срабатывании ЭПК соединяет правую рабочую полость 42 с магистралью газа высокого давления, а левую рабочую полость 41 с линией выхлопа, и ротор 30 перемещается с упора 39 исходного положения на полный угол θ
При совпадении в БСВ 10 текущего бортового времени t с временем основной работы t2, вырабатываемым БЗВОР 7, БЗСУОР 3 выдает через БРОР 13 на БПР 15 и далее на БОСР 18 последовательность кодов δx, соответствующую повороту выходного вала на углы, требуемые при основной работе ЖРД. В начальный момент времени код обратной связи δy имеет максимальное значение. С выхода БОСР 18 код разности δ=δx-δy поступает на БУВОД 19. В БУВОД происходит формирование закона управления приводом путем сравнения кода разности δ с заданной величиной кода переключения режима управления ЭД 23 δB и с заданной величиной точности поддержания требуемого положения δT по следующему алгоритму [1].
при  - подача (через УПУ) на обмотки ЭД максимального напряжения и работа ЭД с максимальной частотой вращения (релейный режим);
- подача (через УПУ) на обмотки ЭД максимального напряжения и работа ЭД с максимальной частотой вращения (релейный режим);
при  - обнуление выходного напряжения релейного порогового устройства 20 и выдача с блока формирования импульсов БФИ 21 на УПУ 22 досылающих импульсов для довыведения выходного вала привода в требуемое положение (импульсный режим);
- обнуление выходного напряжения релейного порогового устройства 20 и выдача с блока формирования импульсов БФИ 21 на УПУ 22 досылающих импульсов для довыведения выходного вала привода в требуемое положение (импульсный режим);
при δ≤δT (совпадение кодов δx и δy с заданной точностью ±δT - прекращение подачи досылающих импульсов (блокировка БФИ) и, как следствие останов ЭД.
ЭД через редуктор 24 вращает статор 29, при этом лопасть 36 остается прижатой перепадом давления газа к упору конечного положения 40, осуществляя тем самым передачу крутящего момента от статора к выходному валу СМ 26. Угол поворота статора изменяется от максимального значения θ
При совпадении в БСВ 10 текущего бортового времени t с временем выключения t3, вырабатываемым БЗВВ 8, БЗСУВ 2 выдает в БРРВ 12 сигнал, формирующий управляющее напряжение на входе в БКСВ 17, который, срабатывая, раскрывает электрическую цепь обмоток электропневмоклапана ЭПК 27. Под действием возвратной пружины запорно-регулирующий элемент ЭПК возвращается в положение, показанное на фиг. 2, соединяя левую полость 41 с магистралью высокого давления газа, а правую полость 42 - с линией выхлопа. Под действием сформированного перепада давления на лопасти 36 ротор 30 с максимальной скоростью поворачивается от упора конечного положения 40 на угол, равный разности между полным углом поворота статора θ
Использование в системе управления режимом ЖРД наряду с цифровой следящей системой неполноповоротного газового силового механизма с подвижным статором относительно неподвижных упоров корпуса и подвижным ротором относительно упоров статора, удерживаемого выходным звеном редуктора электропривода, обеспечивает возможность комбинированного управления режимами работы ЖРД на различных участках циклограммы его работы.
Как следствие этого обеспечивается:
1) регулируемый запуск и останов ЖРД при высокой скорости вращения выходного вала привода (например, от 180 до 230 o/с), нагружаемого большим противодействующим моментом (например, от 8 до 12 кгс • м и выше).
2) высокая точность отработки командных сигналов (не ниже 1% от полного угла поворота выходного вала) при основной работе ЖРД.
Таким образом, заявляемая система управления режимом ЖРД открывает возможность использования в приводе относительно маломощных электродвигателей, что позволит снизить затраты электроэнергии на управление приводом, и, как следствие, уменьшить массу бортового источника электропитания, а также бортовой кабельной сети и устройства сопряжения электродвигателя с блоком управления.
Источники информации
1. Белицкий Д.С., Жарков М.Н., Стоялов В.В., Шутенко В.И. Электромеханический привод в системе управления режимами жидкостных ракетных двигателей. Известия Академии наук. Теория и системы управления, 1996, N 1, с. 118-124.
2. Батоврин А. А. , Дашевский П.Г., Лебедев В.Д. и др. Цифровые системы управления электроприводами. - Л.: Энергия, 1977.
3. Бобнев С.А., Стоялов В.В. Цифровая следящая система. Авторское свидетельство N 2037869.
4. Башта Т.М. Гидропривод и гидропневмоавтоматика. - М.: Машиностроение, 1972, с. 62.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ МОМЕНТА УПРАВЛЕНИЯ ПРИ РАЗВОРОТЕ КОСМИЧЕСКОГО АППАРАТА | 1995 |
|
RU2094332C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092403C1 |
| НЕПОЛНОПОВОРОТНЫЙ ГИДРАВЛИЧЕСКИЙ СИЛОВОЙ МЕХАНИЗМ | 1997 |
|
RU2119104C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2117300C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2095608C1 |
| СИСТЕМА НАДДУВА ТОПЛИВНЫХ БАКОВ ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2119082C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ НА КРИОГЕННОМ ТОПЛИВЕ | 1996 |
|
RU2118684C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЕКТОРА УСКОРЕНИЯ | 1995 |
|
RU2079143C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УПРАВЛЯЕМЫХ КЛЮЧЕЙ | 1996 |
|
RU2101748C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
Изобретение относится к машиностроению и может быть использовано в системах управления подачей рабочего тела, например, в системах управления режимом жидкостного ракетного двигателя (ЖРД). Техническим результатом настоящего изобретения является снижение затрат электроэнергии на управление приводом, уменьшение массы бортового источника электропитания, бортовой кабельной сети и устройств сопряжения электродвигателя с блоком управления. Заявленная система управления режимом ЖРД содержит блок задания сигнала управления запуском, блок задания сигнала управления выключением, блок задания сигнала управления работой на основном режиме, блок задания времени запуска, блок задания времени выключения, блок задания времени основного режима работы, блок задания бортового времени, блок сравнения времени, блок разрешения режима запуска, блок разрешения режима выключения, блок разрешения основного режима, блок определения сигнала рассогласования, блок управления включением и остановом электродвигателя, усилительно-преобразующее устройство, электродвигатель, редуктор, датчик обратной связи, неполноповоротный газовый силовой механизм с элементами подключения к выходному звену редуктора, электропневмоклапан запуска и выключения, блок коммутации сигнала запуска, блок коммутации сигнала выключения, блок переключения режимов, блок задания времени установки начального положения, блок задания сигнала управления начальным положением, блок разрешения установки начального положения. 4 ил.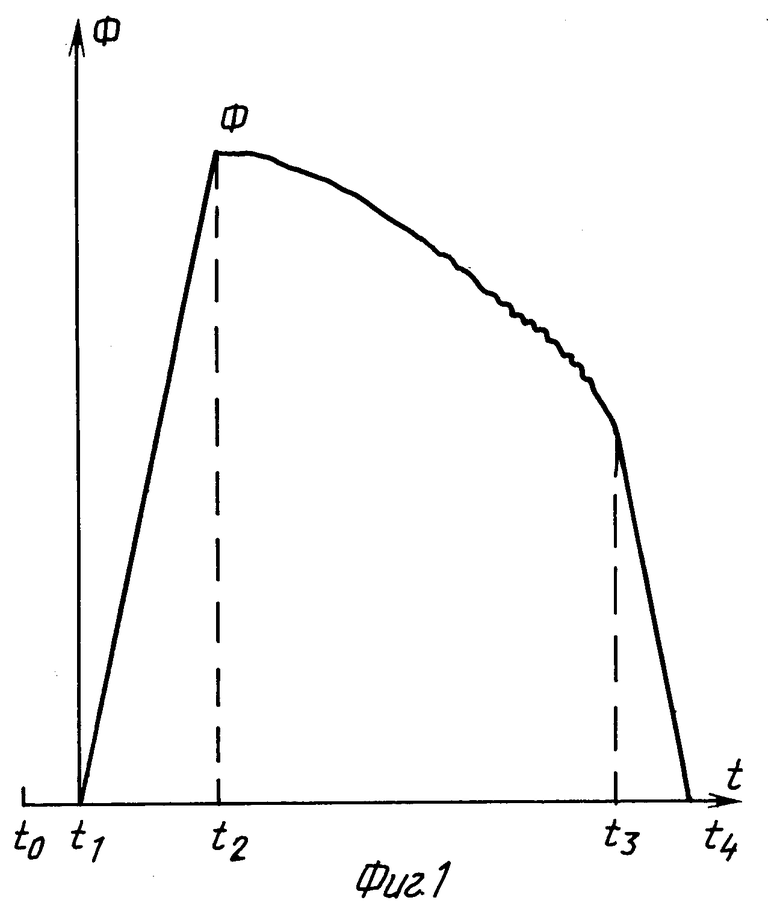
Система управления режимом жидкостного ракетного двигателя, содержащая блок задания сигнала управления запуском, блок задания сигнала управления выключением, блок задания сигнала управления работой на основном режиме, связанные своими выходами соответственно с блоком разрешения режима запуска, блоком разрешения режима выключения, блоком разрешения основного режима, при этом вторые входы блока разрешения режима запуска, блока разрешения режимы выключения, блока разрешения основного режима связаны с тремя выходами блока сравнения времени, три входа которого соответственно связаны с выходами блока задания времени запуска, блока задания времени основного режима работы, блока задания времени выключения, пятый вход блока сравнения времени - с блоком задания бортового времени, выход блока определения сигнала рассогласования соединен с блоком управления включением и остановом электродвигателя, выход которого связан с усилительно-преобразующим устройством, выход которого связан с электродвигателем, связанным с редуктором, а также датчик обратной связи, выход которого связан с одним из входов блока определения сигнала рассогласования, отличающаяся тем, что в нее введены неполноповоротный газовый силовой механизм с элементами подключения к выходному звену редуктора, электропневмоклапан запуска и выключения, блок коммутации сигнала запуска, блок коммутации сигнала выключения, блок переключения режимов, блок задания времени установки начального положения, блок задания сигнала управления начальным положением, блок разрешения установки начального положения, при этом выходы блока разрешения режима запуска и блока разрешения режима выключения соединены соответственно с входами блока коммутации сигнала запуска и блока коммутации сигнала выключения, выходы блока коммутации сигнала запуска и блока коммутации сигнала выключения связаны с электрическим входом электропневмоклапана запуска и выключения, выходные магистрали которого связаны с рабочими полостями неполноповоротного газового силового механизма, выход блока задания времени установки начального положения связан с четвертым входом блока сравнения времени, выход блока задания сигнала установки начального положения связан с входом блока разрешения установки начального положения, второй вход которого связан с четвертым выходом блока сравнения времени, входы блока переключения режимов связаны с выходами блока разрешения основного режима и блока разрешения установки начального положения, выход блока переключения режимов связан с вторым входом блока определения сигнала рассогласования, а выход неполноповоротного газового силового механизма - с датчиком обратной связи.
| Белицкий Д.С | |||
| и др | |||
| Электромеханический привод в системе управления режимами жидкостных ракетных двигателей | |||
| Известия Академии наук: Теория и системы управления | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
| Батоврин А.А | |||
| и др | |||
| Цифровые системы управления электроприводами | |||
| - Л.: Энергия, 1977, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1990 |
|
RU2037869C1 |
| Башта Т.М | |||
| Гидропривод и гидропневмоавтоматика | |||
| - М.: Машиностроение, 1972, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
