Изобретение относится к электротехнике, к системам, содержащим электрические приводы с шаговыми двигателями, требующими точного позиционирования исполнительного механизма, например графопостроители, станки с программным управлением и т.д.
Заявленный способ относится к способам управления с электрическим дроблением шага. Принцип электрического дробления шага шагового двигателя с ограниченным числом фаз и полюсов основан на управлении пространственной ориентацией вектора результирующего поля в рабочем зазоре посредством модуляции фазных напряжений (токов) внутри основного периода коммутации. Это приводит к увеличению числа электрических состояний и в пределе сводится к непрерывному изменению токов в его обмотках, что позволяет получать низкие и сверхнизкие скорости движения и уменьшать величину основного шага.
Известен способ управления шаговым двигателем, включающий импульсную модуляцию фазных напряжений путем изменения частоты подачи управляющих импульсов с периодическим изменением скважности напряжений (Итоги науки и техники, серия "Электропривод и автоматизация промышленных установок", - М., 1978, т. 6, с. 84-85). Фазные обмотки подключаются к источникам питания с помощью ключей. Ключи управляются выходным напряжением триггера, на установочные входы которого поступают две последовательности сдвинутых по фазе импульсов с частотами f1 и f2.
Наиболее близким аналогом является способ управления шаговым двигателем, заключающийся в том, что осуществляют импульсную модуляцию фазных напряжений, изменяя скважность управляющих импульсов путем изменения длительности указанных импульсов (патент Великобритании N 2165107, H 02 P 8/00, 1986). Управление шаговым двигателем осуществляется путем периодического подключения фазных обмоток к источнику питания путем управления ключами, через которые фазные обмотки подключены к источнику питания. Управление осуществляется таким образом, что обеспечивается возрастание напряжения и токов в фазах ступенями от нуля до максимума с последующим уменьшением такими же ступенями до нуля. Напряжение каждой ступени формируется за счет изменения длительности импульсов, а при неизменной частоте, следовательно и скважности импульсов в пределах соседних ступеней. При этом длительность (скважность) импульсов в пределах одной ступени остается неизменной.
При таком способе необходимо иметь импульсы различной длительности, причем, чем большая точность требуется, тем больше значений необходимо запомнить. При создании устройства управления, реализующего данный способ на микропроцессоре, потребуется его высокое быстродействие. А при управлении несколькими двигателями создание такого устройства станет проблематичным.
Технический результат, достигаемый при реализации указанного способа, заключается в повышении точности установки угла шагового двигателя и количества фиксированных положений ротора.
Указанный технический результат достигается тем, что в способе управления шаговым двигателем, при котором осуществляют импульсную модуляцию фазных напряжений, изменяя скважность управляющих импульсов путем изменения длительности указанных импульсов, длительность управляющих импульсов формируют как сумму соответствующих импульсов из ряда весовых импульсов, длительности которых отличаются в кратное число раз, равное двум, формируя при этом требуемое значение напряжения на обмотках двигателя.
Для реализации этого способа необходимо сформировать эталонные (весовые) импульсы, длительности которых различаются в два раза. Для изменения напряжения на фазах двигателя от нуля до максимума и снова до нуля ступенями скважностью импульсов в пределах одной ступени изменяют. При этом частота импульсов не изменяется, поэтому скважность меняется за счет изменения длительности импульсов.
Если частота управляющих импульсов f Гц, то длительность одной ступени (величина микрошага) T= 1/f. Длительность эталонных импульсов определяется как t=T/2n. Тогда в пределах микрошага время замкнутого состояния ключа определяется ∑ = T/2n. Поскольку среднее напряжение на фазных обмотках шагового двигателя пропорционально скважности, то оно определяется Uср. = Umax/2n.
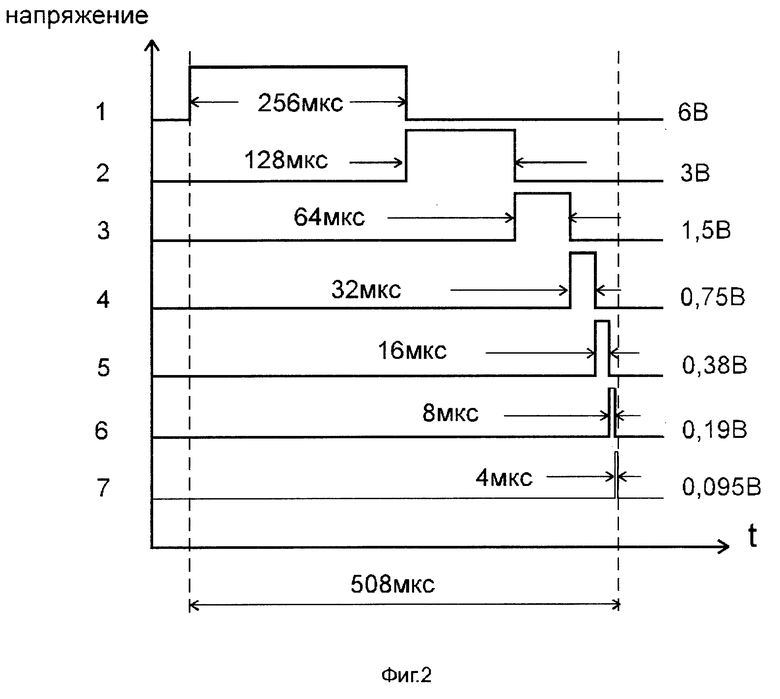
В зависимости от точности установки угла выбирается число "n". Если, например, выбрать n=8, то получим семь фиксированных значений длительностей. При этом можно получить 128 микрошагов. При тактовой частоте 2 кГц эталонные импульсы составляет следующий ряд: 256 мкс, 128 мкс, 64 мкс, 32 мкс, 16 мкс, 8 мкс, 4 мкс. Если напряжение питания фазных обмоток равно 12В, то можно получить следующий ряд напряжений 6В, 3В, 1,5В, 0,75В, 0,38В, 0,19В, 0,095В. Формируя длительность управляющего импульса как сумму длительностей импульсов из указанного ряда, можно получить ступенчатое изменение напряжения на фазах двигателя с любым законом приращения напряжения.
Устройство для реализации указанного способа приведено на фиг. 1.
Устройство для управления шаговым двигателем [фиг. 1] снабжено кварцевым резонатором 8, а в качестве сумматора и распределителя импульсов использован в данной блок-схеме микропроцессор 9, связанный выходом через согласующие усилители мощности 1-6 с фазовыми обмотками шаговых двигателей, а входом - с приемником линии 7 для приема сигналов с пульта управления.
Программируемое запоминающее устройство микропроцессора содержит таблицу длительностей импульсов, составляющих ряд весовых импульсов. В зависимости от требуемого закона приращения напряжения, для каждой ступени микропроцессор выбирает из указанного ряда необходимые длительности импульсов путем формирования необходимых адресов для ПЗУ. Импульсы выбранной длительности суммируются и поступают на распределитель импульсов.
На фиг. 2 показаны весовые импульсы, формирующиеся в ПЗУ микропроцессора для n=8. Для большей точности управления n выбирается больше, соответственно количество весовых импульсов будет больше.
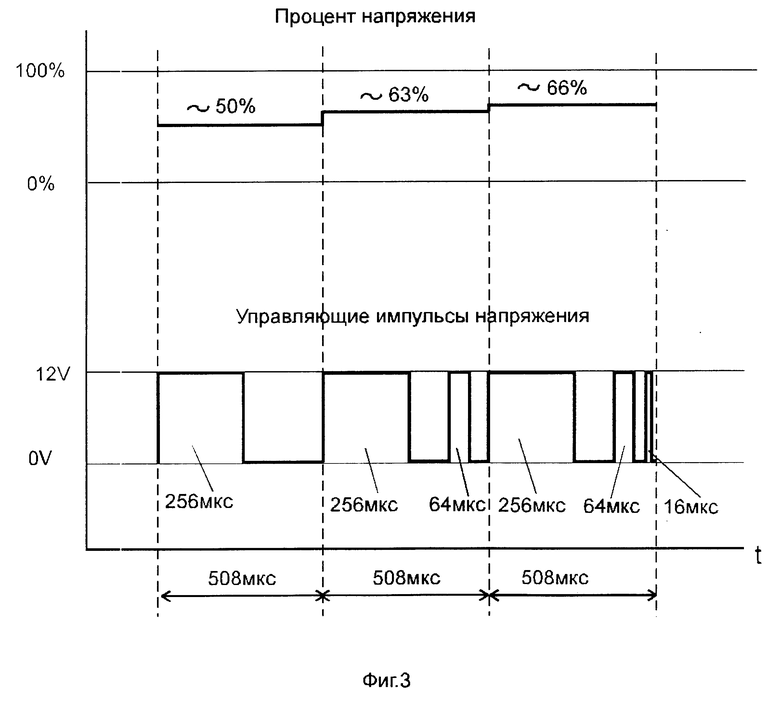
На фиг. 3 показан принцип формирования ступенчатого напряжения для фаз двигателя.
К микропроцессору могут быть подключены от 1 до 6 шаговых двигателей при использовании отечественного процессора 1816ВЕ751 (зарубежный аналог 87С51) или от 1 до 8 шаговых двигателей при использовании зарубежного процессора 87С451 (М1-М6).
Такой способ позволяет получить низкие и сверхнизкие скорости движения и уменьшить величину основного шага как в целое, так и в дробное число раз, тем самым получая повышение точности установки угла шагового двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления 2-фазным шаговым электрическим двигателем | 2019 |
|
RU2708380C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ M-ФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1991 |
|
RU2010294C1 |
| ЭЛЕКТРОДУГОВОЙ ГРОМКОГОВОРИТЕЛЬ | 2012 |
|
RU2496254C1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2273944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2719604C1 |
| СХЕМА ПРИВОДА ШАГОВОГО ДВИГАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ШАГОВОГО ДВИГАТЕЛЯ | 2004 |
|
RU2357354C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2722417C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ МОМЕНТА МАХОВИЧНОГО ДВУХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ТОЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1968 |
|
SU1840055A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2556874C1 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
Используется в электроприводах с шаговым двигателем, требующих точного позиционирования исполнительных механизмов - светотехнические приборы, графопостроители и т. д. Технический результат - повышение точности установки угла шагового двигателя. Способ заключается в том, что осуществляют импульсную модуляцию фазных напряжений на обмотках двигателя. Для этого изменяют скважность управляющих импульсов, подаваемых на коммутатор, подключающий фазные обмотки к источнику питания, путем изменения длительности этих импульсов. Указанную длительность формируют как сумму соответствующих импульсов из ряда эталонных (весовых) импульсов, длительности которых различаются в кратное число раз, равное двум. При этом на обмотках формируется требуемое напряжение. 3 ил.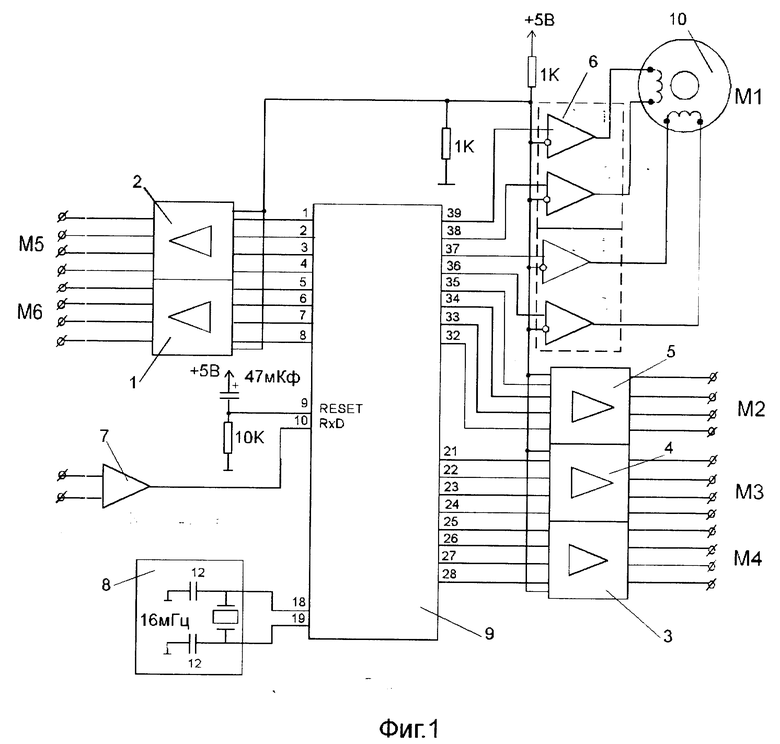
Способ управления шаговым двигателем, заключающийся в том, что осуществляют импульсную модуляцию фазных напряжений на обмотках двигателя, изменяя скважность управляющих импульсов, обеспечивающих подачу напряжения на обмотки двигателя, путем изменения длительности указанных импульсов, отличающийся тем, что длительность управляющих импульсов формируют как сумму соответствующих импульсов из ряда весовых импульсов, длительности которых отличаются в кратное число раз, равное двум, формируя при этом требуемое значение напряжения на обмотках двигателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Итоги науки и техники, серия "Электропривод и автоматизации промышленных установок" | |||
| - М., 1978, т.6, с.84 - 84 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| GB, патент, 2165107, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
