Предлагаемое изобретение относится к электротехнике и может быть использовано в системах управления шаговыми двигателями (ШД) в дискретных электроприводах. Данное техническое решение может применяться преимущественно при решении задачи определения момента достижения механического упора электроприводом с работающим в полношаговом режиме двухобмоточным шаговым двигателем без потери синхронизма и установке этого привода в начальное положение.
Известны способы определения начального положения электропривода с двухобмоточным шаговым двигателем с использованием бесконтактных методов, основанных на контроле изменений электрических параметров (обычно напряжений или токов) в обмотках ШД при встрече с механическим упором в процессе движения. Например, в [1] измеряют токи в обмотках двухфазного ШД и вычисляют среднее и действующее значения, а также время установления амплитуды тока и их различия по сравнению со значениями, полученными на предыдущих шагах. Данное техническое решение подразумевает хранение и обработку в реальном времени существенного объема информации о перечисленных выше параметрах как минимум за четыре предыдущих шага, что требует значительных вычислительных ресурсов. В техническом решении [2], для трехфазного ШД, работающего в режиме микрошага, синхронно с выполнением микрошагов измеряют сумму токов, определяют действующее значение суммы токов на интервале полного шага, сравнивают полученный результат с пороговым значением и при превышении действующего значения над пороговым определяют момент достижения механического упора. Данное решение не может быть использовано для определения момента останова ШД, работающего в полношаговом режиме, и требует выполнения значительного объема вычислительных процедур, выполняемых в реальном масштабе времени. Подобное решение описано в [3] и обладает теми же ограничениями.
Кроме того, при использовании для определения момента достижения механического упора в уже существующей системе управления ШД упомянутых выше технических решений потребуется установка дополнительных датчиков тока, что может вызвать затруднения. Поэтому наряду со способами определения момента достижения механического упора по результатам измерения токов все чаще предлагаются методы, основанные на анализе напряжений на обмотках ШД.
Наиболее близкими к предполагаемому изобретению являются технические решения, предложенные в [4] и [5] и представляющие собой способ и устройство для обнаружения механического упора в ШД, в котором параметры обратной эдс определяются непосредственно из формы сигнала на его обмотках. За прототип принято изобретение [5]. Данный способ-прототип включает операции: движение ШД пошагово в микрошаговом режиме в прямом направлении по направлению к механическому ограничителю до выполнения предопределенного количества микрошагов; движение ШД в прямом направлении к ограничителю на один дополнительный микрошаг, на котором ШД встретит упругое противодействие ограничителя и выполнит измерение обратной электродвижущей силы (эдс) шагового двигателя; интегрирование отсчетов обратной эдс; сравнение результата интегрирования обратной эдс с предопределенным пороговым значением, чтобы определить факт достижения ТТТД механического упора; и, если результат интегрирования обратной эдс больше предопределенного порогового значения, то ШД должен дальше двигаться до достижения предельного количества шагов, и, если результат интегрирования обратной эдс меньше предопределенного порогового значения, то, ШД должен остановить движение в прямом направлении и повторить итерацию интегрирования и сравнения, причем шаги выполняются сразу при включении устройства.
Так как измерение сигнала противо-эдс (back EMF) производится всегда на обесточенной обмотке, то данное техническое решение применимо только в случае работы ТТТД с поочередным включением обмоток (так называемый «волновой режим»). Такой способ управления ШД называют волновой последовательностью «one phase on» или wave drive mode [6]. В настоящее время чаще применяется полношаговый режим с двумя одновременно включенными обмотками, обеспечивающий примерно на 40% больший движущий момент, чем в случае с поочередным включением обмоток. Его называют «two-phase-on» full step или full step mode. Реализация описанного способа [5] требует значительных аппаратных и программных ресурсов для преобразования аналоговых сигналов в цифровые значения, хранения результатов отсчетов измеряемых процессов, последовательного выполнения арифметических и логических операций.
Задачами предполагаемого изобретения являются: упрощение способа и устройства для определения момента достижения электроприводом механического упора, расширение их области применения, снижение аппаратных и программных затрат, а также повышение помехозащищенности.
Предлагаемое техническое решение предназначено для определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, работающим в полношаговом режиме с двумя одновременно включенными обмотками.
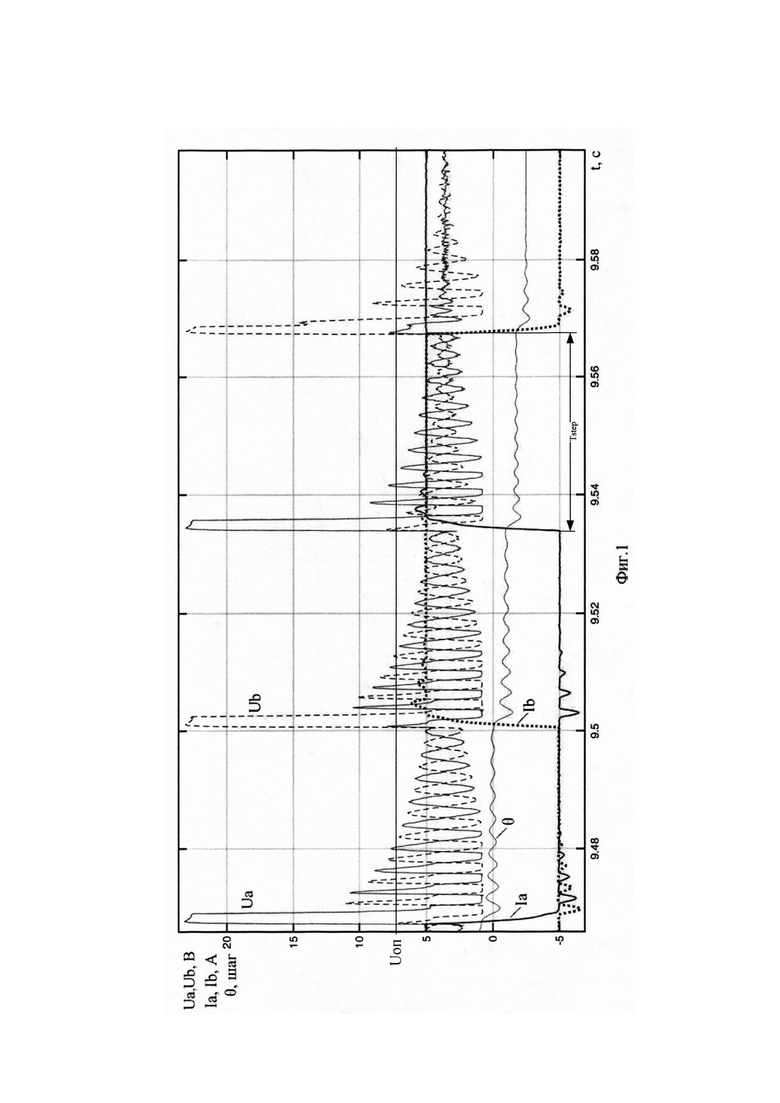
Способ основан на характерном относительном изменении амплитуд пульсации нормированных значений напряжений на обмотках ШД при приближении его ротора к препятствию. Соответствующие процессы изменения амплитуд пульсации нормированных значений напряжений на обмотках ШД Ua и Ub, полученные экспериментально, приведены на фиг. 1. Эти процессы возникают при совершении ротором ТТТД свободных колебаний после действия управляющего сигнала во время совершения шагов с частотой не менее чем в пять раз ниже частоты собственных колебаний ротора, когда ротор движется в сторону механического упора. Свободные колебания ротора ШД при его работе в полношаговом режиме возникают после изменения направления тока в активной на данном шаге обмотке и включения режима стабилизации модуля тока (активная обмотка - обмотка, в которой производится изменение направления тока на противоположное).
Нормированное значение напряжения на каждой обмотке ШД формируется как сумма осредненных путем обработки фильтрами нижних частот потенциалов на обоих выводах обмотки относительно отрицательного вывода источника питания драйвера ШД. Такое нормирование напряжения позволяет получить сигнал всегда одной положительной полярности, из которого удалена высокочастотная составляющая, вызванная импульсной модуляцией напряжения при работе контура стабилизации тока в обмотке ТТТД. На этом же графике на фиг. 1 показаны также процессы изменения тока обмоток Ia, Ib и процесс изменения углового положения ротора в.
Можно заметить, что после реверса тока каждой из обмоток ТТТД при совершении очередного шага происходят свободные колебания ротора привода со всеми присоединенными к нему элементами, сопровождающиеся пульсациями нормированных напряжений на обмотках ТТТД Ua и Ub. При касании ротором ШД механического упора на него начинает действовать нагрузка, вызывающая упругую деформацию, и ротор уже не может повернуться на полную величину шага (см. третий по счету шаг, показанный на фиг. 1). Одновременно на том же шаге, как хорошо видно на графике, происходит резкое изменение по сравнению с предыдущими шагами соотношения амплитуд пульсаций напряжений в активной и пассивной обмотках ТТТД на отрезке времени, начинающемся сразу после завершения реверса тока в активной на текущем шаге обмотке ТТТД.
Если выделить отрезок наблюдения (см. фиг. 1), начинающийся сразу после завершения реверса тока в активной на текущем шаге обмотке и имеющий продолжительность полтора-два периода свободных колебаний ротора ТТТД, и на этом отрезке сравнивать нормированные напряжения обеих обмоток с некоторым опорным напряжением Uoп, (которое, например, на 25% меньше амплитуды первого максимума нормированного значения напряжения на обмотке, в которой не производилось изменение полярности тока), можно заметить, что нормированное напряжение на одной из обмоток (а именно, на пассивной) на отрезке наблюдения всегда будет оставаться меньше опорного напряжения. Это утверждение справедливо для текущего шага, на котором ротор ШД приближается к механическому препятствию и на него начинает действовать упругая нагрузка. Описанное явление послужило физической основой для создания предполагаемого изобретения.
Решение задачи предполагаемого изобретения достигается тем, что после поступления управляющего сигнала на выполнение шага на участке свободных колебаний ротора шагового двигателя определяют нормированные значения напряжений на обеих обмотках шагового двигателя и сравнивают каждое из них с заданным пороговым значением на отрезке наблюдения, вмещающем от полутора до двух периодов собственных колебаний ротора ненагруженного электропривода и отстоящем от момента подачи управляющего сигнала на интервал времени, достаточный для изменения полярности тока в активной фазе шагового двигателя и, если на отрезке наблюдения хотя бы одно из нормированных значений напряжений не превысит заданное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора. Причем нормированное значение напряжения на обмотке определяют как сумму сглаженных фильтрами нижних частот потенциалов на ее выводах относительно отрицательного вывода источника питания драйвера.
Выбранный метод формирования нормированного напряжения на обмотке ТТТД обеспечивает его однополярное положительное значение на любом текущем шаге.
Интервал времени, достаточный для изменения полярности тока в активной фазе шагового двигателя, по экспериментальным данным можно принять равным 0,8 периода собственных колебаний ротора ненагруженного электропривода.
Для формирования нормированных значений напряжений обмоток выбирают постоянную времени фильтров нижних частот в восемь раз меньше периода собственных колебаний ротора ненагруженного электропривода, что позволит удалить из формируемого сигнала высокочастотную составляющую, вызванную импульсной модуляцией, применяющейся при работе контура стабилизации уровня тока в обмотке ШД.
Пороговое значение напряжения, с которым на отрезке наблюдения сравнивают нормированные значения напряжений обмоток, по экспериментальным данным можно, например, принять равным 0,75 от величины первого максимума на отрезке наблюдения нормированного значения напряжения на обмотке, в которой не производилось изменение полярности тока, при собственных колебаниях ротора ненагруженного электропривода после подачи управляющего сигнала.
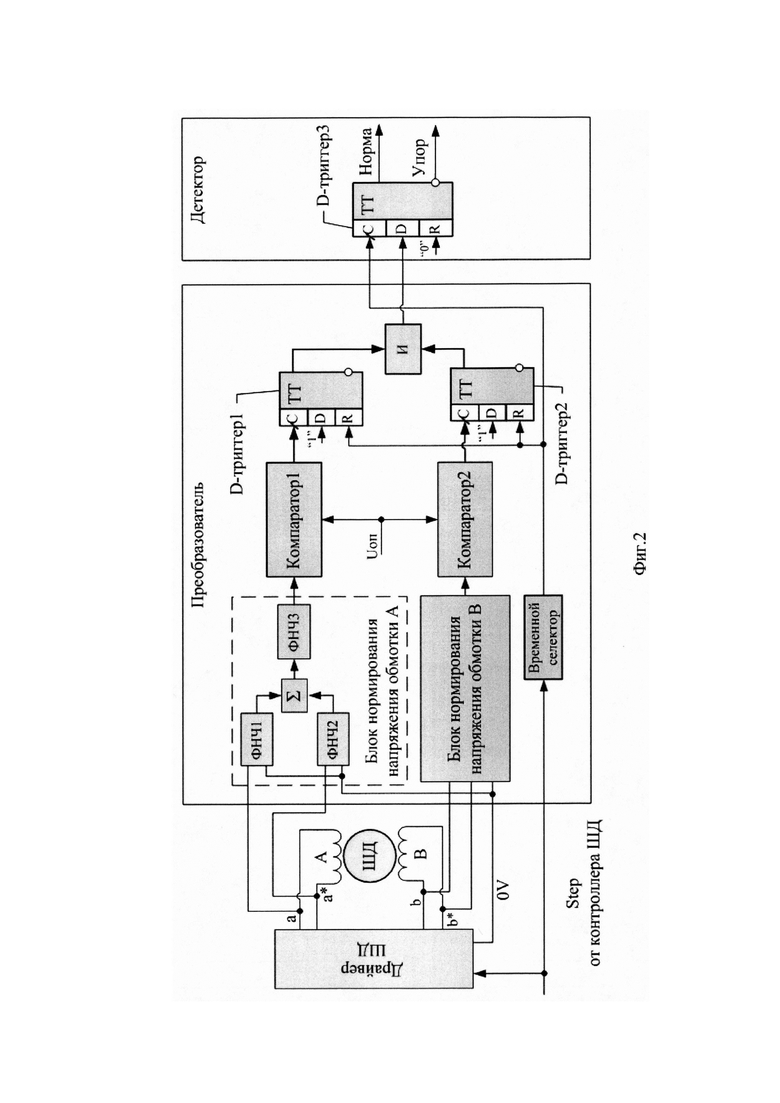
Для реализации предлагаемого способа определения момента достижения механического упора электроприводом с двухобмоточным ТТТД, работающим в полношаговом режиме, разработано устройство, в котором преобразователь и детектор снабжены дополнительными входами, а преобразователь содержит два блока нормирования напряжения обмотки шагового двигателя, два компаратора, источник опорного напряжения, временной селектор, два D-тригтера и элемент «И». Причем вводы блоков нормирования напряжений обмоток соединены с соответствующими выводами обмоток шагового двигателя и источника питания драйвера. Прямые входы компараторов соединены с соответствующими выходами блоков нормирования напряжений обмоток, а их инверсные входы - с выходом источника опорного напряжения. Вход временного селектора является дополнительным входом преобразователя и соединен с соответствующим выходом контроллера шагового двигателя. Входы сброса первого и второго D-триггеров соединены с выходом временного селектора. Входы данных первого и второго D-тригтеров соединены с источником высокого логического потенциала, а их тактовые входы - с выходами соответствующих компараторов. Прямые выходы первого и второго D-триггеров соединены с входами элемента «И», выход которого является выходом преобразователя и соединен с входом детектора. Детектор выполнен в виде D-триггера, вход сброса которого соединен с источником низкого логического потенциала, вход данных является входом детектора и соединен с выходом элемента «И», а тактовый вход является дополнительным входом детектора и соединен с выходом временного селектора. Прямой и инверсный выходы D-триггера являются выходами детектора.
Каждый блок нормирования напряжения на обмотке шагового двигателя содержит три фильтра нижних частот и сумматор, причем вводы первого и второго фильтров нижних частот соединены с выводами соответствующей обмотки шагового двигателя и отрицательным выводом источника питания драйвера, а их выходы - с входами сумматора. Выход сумматора соединен с входом третьего фильтра нижних частот, выход которого является выходом блока нормирования напряжения на обмотке шагового двигателя.
Сущность предлагаемого технического решения поясняется чертежами.
Фиг. 1. Полученные экспериментально осциллограммы процессов изменения токов в обмотках ШД, нормированных значений напряжений на обмотках ШД и углового положения ротора при его движении в сторону механического упора.
Фиг. 2. Функциональная схема устройства определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме и схема его подключения к цепям драйвера и котроллера ШД.
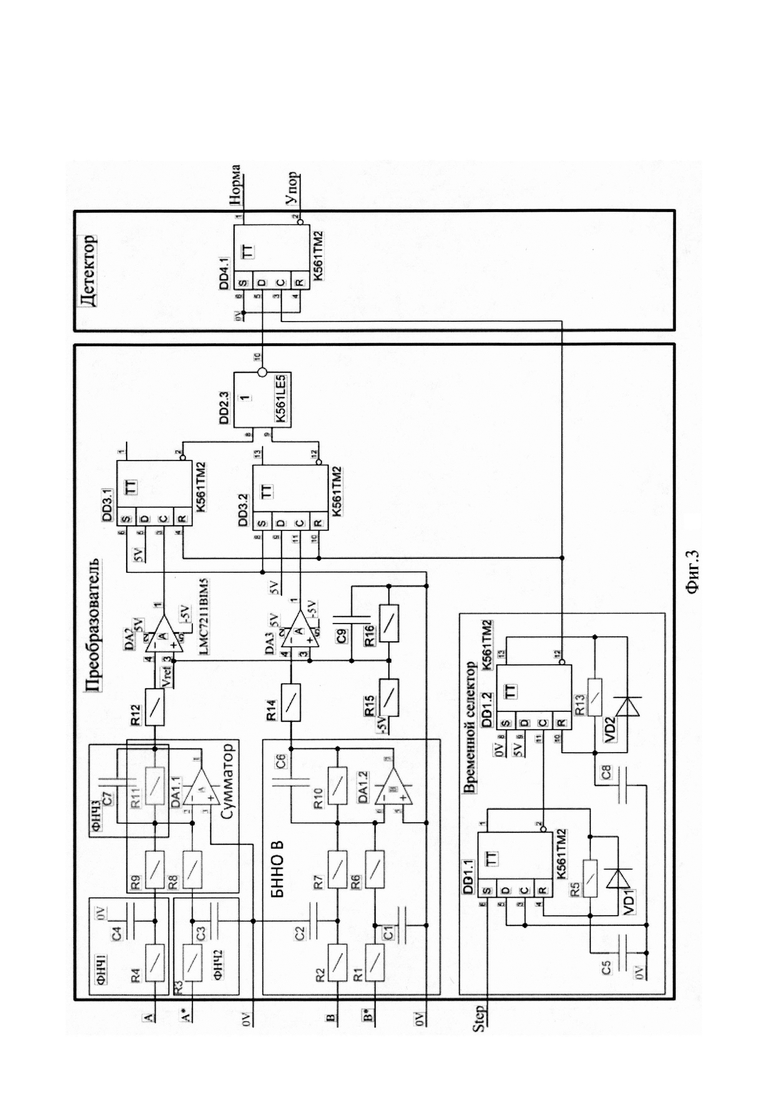
Фиг. 3. Электрическая принципиальная схема возможного исполнения устройства определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме.
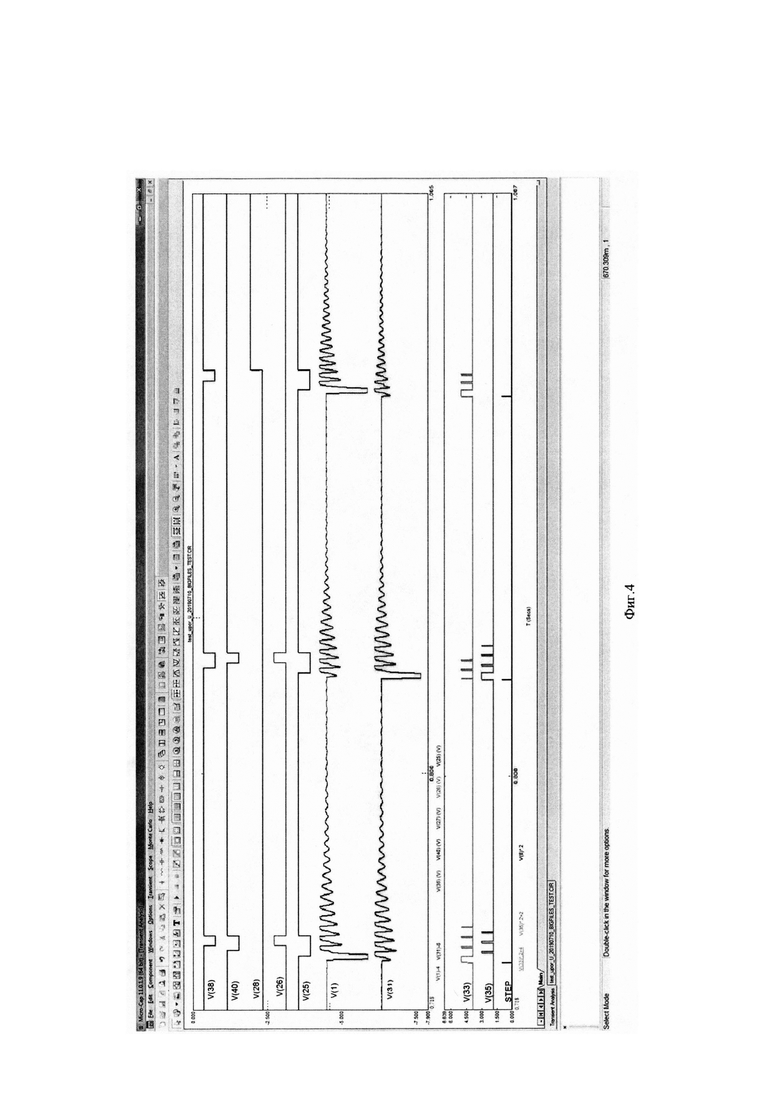
Фиг. 4. Результаты компьютерного моделирования работы электрической принципиальной схемы возможного исполнения устройства определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме.
Предлагаемый способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, работающим в полношаговом режиме, основан на определении синхронно с выполнением шага информационного параметра процессов изменения напряжений на обмотках шагового двигателя на текущем шаге при движении ротора в сторону механического упора. В качестве такого информационного параметра в предлагаемом техническом решении используется результат сравнения на отрезке наблюдения нормированных значений напряжений на обеих обмотках шагового двигателя с заданным пороговым значением. Если на отрезке наблюдения хотя бы одно из нормированных значений напряжений не превысит заданное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора. Выбор заданного порогового значения, отрезка наблюдения и частотных свойств фильтров нижних частот, применяемых при формировании нормированных значений напряжений на обмотках, можно производить, например, по экспериментальным данным, как описано выше. Причем нормированное значение напряжения на обмотке определяют как сумму сглаженных фильтрами нижних частот потенциалов на ее выводах относительно отрицательного вывода источника питания драйвера.
Для реализации предлагаемого способа можно использовать устройства, построенные на дискретных элементах, с применением ПЛИС (программируемых логических интегральных схем), БМК (базовых матричных кристаллах) или на программно-аппаратных средствах микроконтроллера.
Предлагаемое устройство, реализующее заявляемый способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, выполнено на дискретных элементах. Оно связано с контроллером ШД, его драйвером и обмотками и содержит (см. функциональную схему на фиг. 2) последовательно соединенные преобразователь с пятью вводами, соединенными с соответствующими выводами обмоток шагового двигателя и источника питания драйвера, и детектор. Преобразователь и детектор снабжены дополнительными входами. Причем преобразователь содержит два блока нормирования напряжения обмотки шагового двигателя, два компаратора, источник опорного напряжения, временной селектор, два D-триггера и элемент «И». Вводы блоков нормирования напряжений обмоток соединены с соответствующими выводами обмоток шагового двигателя и источника питания драйвера. Прямые входы компараторов соединены с соответствующими выходами блоков нормирования напряжений обмоток, а их инверсные входы - с выходом источника опорного напряжения. Вход временного селектора является дополнительным входом преобразователя и соединен с соответствующим выходом контроллера шагового двигателя. Входы сброса первого и второго D-триггеров соединены с выходом временного селектора, входы данных первого и второго D-триггеров соединены с источником высокого логического потенциала, а их тактовые входы - с выходами соответствующих компараторов. Прямые выходы первого и второго D-триггеров соединены с входами элемента «И», выход которого является выходом преобразователя и соединен со входом детектора. Детектор выполнен в виде D-триггера, вход сброса которого соединен с источником низкого логического потенциала, вход данных является входом детектора и соединен с выходом элемента «И», а тактовый вход является дополнительным входом детектора и соединен с выходом временного селектора. Прямой и инверсный выходы D-триггера являются выходами детектора.
Каждый блок нормирования напряжения на обмотке шагового двигателя содержит три фильтра нижних частот и сумматор. Причем вводы первого и второго фильтров нижних частот соединены с выводами соответствующей обмотки шагового двигателя и отрицательным выводом источника питания драйвера, а их выходы - с входами сумматора. Выход сумматора соединен с входом третьего фильтра нижних частот, выход которого является выходом блока нормирования напряжения на обмотке шагового двигателя.
Работает устройство следующим образом. По приходу сигнала Step запускается временной селектор и D-триггеры 1 и 2 устанавливаются в начальное состояние. Сигналы с выводов драйвера (или обмоток) a, a*, b, b*, представляющие собой модулированные по скважности напряжения, поступают на входы ФНЧ1 и ФНЧ2, включенных относительно отрицательного вывода источника питания драйвера 0V. На выходах этих ФНЧ формируются осредненные значения потенциалов Ua, Ua*, Ub и Ub* на указанных выводах относительно отрицательного вывода источника питания драйвера. Далее сигналы попарно суммируются Ua с Ua* и Ub с Ub* соответственно на сумматорах Е соответствующих блоков нормирования напряжения на обмотке шагового двигателя и поступают на входы последующих ФНЧ3, обеспечивающих снижение пульсаций выходного сигнала, вызванных работой модуляторов регуляторов тока драйвера. Сглаженные сигналы с выходов ФНЧ3, представляющие собой нормированные значения напряжений на обмотках А и В, поступают на входы соответствующих компараторов, где они сравниваются с заданным опорным напряжением. На выходе каждого компаратора формируется логический сигнал, свидетельствующий о том, превысило ли соответствующее нормированное напряжение заданное пороговое значение. Эти сигналы с выходов компараторов поступают на тактовые входы первого и второго D-триггеров. Наличие в этих сигналах положительных перепадов на отрезках наблюдения устанавливает логические единицы на их выходах, которые поступают на входы элемента «И» и будут сохраняться до окончания интервала наблюдения. Сигнал высокого логического потенциала на выходе временного селектора формируется вне отрезка наблюдения на текущем шаге и поступает на входы сброса (R) D-триггеров 1 и 2, устанавливая их к моменту начала отрезка наблюдения в исходное состояние.
Отрезок наблюдения формируется следующим образом. После поступления на вход временного селектора от контроллера ТТТД управляющего сигнала Step на выполнение очередного шага в нем отсчитывается временной интервал, достаточный для изменения полярности тока в активной фазе шагового двигателя. Окончание этого временного интервала определяет начало отрезка наблюдения. Продолжительность отрезка наблюдения задается временным селектором от полутора до двух периодов собственных колебаний ротора ненагруженного электропривода. Если на отрезке наблюдения срабатывают оба компаратора, что свидетельствует о достижении нормированными значениями напряжений на обеих обмотках ТТТД заданного порогового значения, то на выходе элемента «И» формируется сигнал высокого логического потенциала, который подается на вход детектора. К этому моменту времени D-триггер детектора (D-триггер 3) находится в состоянии, соответствующем выходному сигналу элемента «И», сформировавшемуся на предыдущем шаге управления на момент окончания отрезка наблюдения. А так как считается, что ротор ТТТД вращается в сторону механического ограничителя, и на предыдущем шаге управления еще не было достигнуто состояние, соответствующее механическому упору, то на выходе элемента «И» на предыдущем шаге управления был сформирован сигнал высокого логического потенциала. А значит, на прямом выходе D-триггера детектора был сформирован сигнал высокого логического потенциала «Норма», что соответствует состоянию устройства, при котором во время вращения ротора ШД не обнаружено механического упора. Если на текущем шаге управления на отрезке наблюдения не сработает один из компараторов, то к концу отрезка наблюдения на выходе элемента «И» будет сформирован сигнал низкого логического потенциала, что при его поступлении на вход данных D-триггера детектора приведет к изменению состояния этого триггера в момент окончания отрезка наблюдения по сигналу с выхода временного селектора. Тогда на прямом выходе D-триггера детектора будет установлен сигнал низкого логического потенциала, а на его инверсном выходе сигнал высокого логического потенциала «Упор», являющийся признаком достижения электроприводом механического упора.
Электрическая принципиальная схема возможного исполнения предлагаемого устройства приведена на фиг. 3. Части схемы, реализующие блоки преобразователя и детектора, очерчены тонкими линиями.
Питание аналоговой части устройства осуществляется от двухполярного источника питания ±5 В. Цифровая часть использует только источник +5 В. Цепи питания на схеме не показаны. Входные цепи преобразователя a, a*, b, b* подключены к одноименным выводам обмоток А и В ТТТД и представляют собой ФНЧ1 и ФНЧ2 блоков нормирования напряжений обмоток (БННО). Для выводов обмотки А они выполнены на элементах R4C4 и R3C3, а для выводов обмотки В - на R2C2 и R1C1 соответственно. Выходные сигналы с выходов этих ФНЧ суммируются на инвертирующем входе операционного усилителя (ОУ) DA1.1 (для обмотки А), на элементах которого С7 и R11 выполнен ФНЧ3. Аналогично применяются элементы DA1.2 и С6 и R10 для обмотки В. Учитывая, что вне зависимости от направления тока в обмотке, один из выводов драйвера через открытый ключ будет соединен с отрицательным выводом источника питания драйвера, имеющим потенциал 0V. С точностью, достаточной для предлагаемого способа, после суммирования с инвертированием, на выходе ОУ DA1.1 будет формироваться инверсное нормированное напряжение на обмотке А. Аналогично на выходе ОУ DA1.2 будет формироваться инверсное нормированное напряжение на обмотке В. В качестве DA1 может быть использован, например, ОУ AD8566ARMZ-R2 [7]. Частота среза ФНЧ(1-3) выбирается в 8 раз выше частоты свободных колебаний ротора ШД. С выхода сумматоров (DA1.1 и DA1.2), объединенных с ФНЧ3, сигналы поступают на входы компараторов DA2, DA3, выполненных на микросхеме LMC7211BIM5 [8]. Учитывая, что сигнал на выходе сумматора имеет отрицательную полярность, для получения на выходе компаратора положительного перепада напряжения при превышении нормированным напряжением порогового значения, напряжение с выходов сумматоров поступает на инвертирующие входы компараторов. Пороговое напряжение Vref формируется делителем R15, R16 от источника напряжения -5 В. Выходные сигналы компараторов поступают на тактовые входы D-триггеров DD3.1, DD3.2. На их входы сброса R на отрезке наблюдения поступает сигнал низкого уровня, разрешающий запись логической единицы с информационного входа D на прямой выход, при появлении положительного перепада напряжения на тактовом входе С. Этот потенциал будет сохраняться на выходе D-триггера до окончания отрезка наблюдения. В качестве D-триггера используется микросхема интегральная К561ТМ2 ВК [9].
Отрезок наблюдения формируется временным селектором, выполненным на двух последовательно включенных одновибраторах, построенных, как показано в [10], на рис. 4.18 в и 6 соответственно. Первый одновибратор (DD1.1) задает интервал времени от поступления сигнала Step (управляющего сигнала на совершение шага) до начала отрезка наблюдения, а второй (DD1.2) - длительность этого отрезка времени.
Ввиду отсутствия в 561 серии цифровых микросхем элемента 2И, для реализации этой функции минимальным числом элементов применен элемент 2ИЛИ-НЕ, на входы которого поданы сигналы с инверсных выходов D-триггеров. В качестве указанного элемента использована микросхема К561ЛЕ5 [11]. На выходе DD2.3 будет формироваться сигнал логической единицы при наличии двух нулевых сигналов на инверсных выходах D-триггеров DD3.1, DD3.2.
С выхода DD2.3 сигнал поступает на вход данных D-триггера DD4.1, состояние которого перепишется на прямой выход при поступлении на его тактовый вход С положительного перепада напряжения в конце отрезка наблюдения. Данное состояние будет сохраняться неизменным до окончания отрезка наблюдения на следующем шаге.
Для подтверждения работоспособности заявляемого технического решения было выполнено компьютерное моделирование работы электрической принципиальной схемы возможного исполнения устройства, реализующего предлагаемый способ. При этом использовался программный пакет Micro-Cap (Microcomputer Circuit Analysis Program) для компьютерного моделирования аналоговых и цифровых электронных устройств [12, 13]. Компьютерное моделирование работы электрической принципиальной схемы устройства проводилось путем подачи на ее входы экспериментальных значений управляющего сигнала Step и электрических потенциалов, замеренных на выводах обмоток ШД при движении ротора ТТТД электропривода в сторону механического упора.
Полученные при компьютерном моделировании переходные процессы изменения электрических потенциалов в характерных точках электрической принципиальной схемы устройства при движении ротора ТТТД электропривода в сторону механического упора приведены на фиг. 4.
На осциллограммах показаны следующие основные сигналы, отражающие работу устройства:
- нормированное значение напряжения на обмотке А - V(1), которое формируется на выходе ФНЧ3 блока нормирования напряжения обмотки А (выход операционного усилителя DA1.1 на электрической принципиальной схеме фиг. 3);
- нормированное значение напряжения на обмотке В - V(31), которое формируется на выходе ФНЧ3 блока нормирования напряжения обмотки В (выход операционного усилителя DA1.2 на электрической принципиальной схеме фиг. 3);
- сигнал на выходе D-триггера DD3.1 - V(38);
- сигнал на выходе D-триггера DD3.2 - V(40);
- сигнал «Упор» на инверсном выходе D-триггера DD4.1 - V(28). Когда этот сигнал имеет высокий логический потенциал (логическая единица), это свидетельствует о достижении электроприводом механического упора;
- сигнал на входе данных D-триггера DD4.1 - V(26);
- сигнал на тактовом входе D-триггера DD4.1 - V(25);
- сигнал на выходе компаратора DA2 - V(33);
- сигнал на выходе компаратора DA3 - V(35);
- управляющий сигнал STEP на совершение шага с соответствующего выхода контроллера ТТТД.
Анализ представленных на фиг. 4 осциллограмм показывает, что, если на всем отрезке наблюдения, длительность которого определяет низкий логический уровень сигнала V(25) на выходе временного селектора, на выходе одного из компараторов формируется сигнал низкого логического уровня (в данном случае первого компаратора DA2 - V(33)), то к моменту окончания отрезка наблюдения на инверсном выходе D-триггера DD4.1 формируется сигнал высокого логического уровня «Упор», являющийся признаком достижения электроприводом механического упора. На приведенном на фиг. 4 интервале времени моделирования работы устройства отрезком наблюдения, на котором формируется сигнал «Упор», будет третий по счету, сформированный после прихода третьего управляющего импульса STEP. Такие результаты компьютерного моделирования подтверждают работоспособность и правильное функционирование предложенной реализации заявленного технического решения.
Таким образом, использование предполагаемого изобретения позволяет по сравнению с прототипом существенно упростить процесс получения и преобразования информации для принятия решения о достижении электроприводом механического упора. Это, соответственно, позволяет упростить устройство, реализующее способ определения момента достижения электроприводом механического упора, и приводит к снижению аппаратных и программных затрат. Кроме того, достигается повышение помехозащищенности за счет использования информационного параметра, который резко изменяет свое значение при касании ротором ШД механического упора. Расширение области применения предлагаемого технического решения достигается благодаря возможности его включения в отработанную и эксплуатирующуюся систему управления приводом без доработки драйвера ШД.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US 7239108 В2 METHOD FOR STEPPER MOTOR POSITION REFERENCING, Date of Patent: Jul. 3, 2007.
2. US 2016/0013743 A1 METHOD AND ELECTRONIC CIRCUIT FOR MOTOR STALL DETECTION, Pub. Date: Jan. 14, 2016.
3. EP 3261245 A1 METHOD AND ELECTRONIC CIRCUIT FOR STALL DETECTION, Date of publication: 27.12.2017 Bulletin 2017/52.
4. US 7880423 B2 METHOD AND APPARATUS FOR STEPPER MOTOR STALL DETECTION, Date of Patent: Feb. 1, 2011.
5. US 9013133 B2 METHOD AND APPARATUS FOR STEPPER MOTOR STALL DETECTION, Date of Patent: Apr. 21, 2015.
6. Емельянов A.B., Шилин A.H. Шаговые двигатели: учебное пособие. Волг. ГТУ. Волгоград, 2005. ISBN №5-230-04591-4.
7. https://www.analog.com/media/en/technical-documentation/data-sheets/AD8565_8566_8567.pdf
8. http://www.ti.corn/lit/ds/symlink/lmc7211-n.pdf
9. Технические условия АДБК.431200.731-11ТУ
10. Технические условия АДБК.431200.731-05ТУ
11. УДК 621.049.77.001.92 Зельдин Е.А. - Импульсные устройства на микросхемах - М.: Радио и связь, 1991, 160 с.
12. www.spectrum-soft.com
13. Амелина М.А., Амелин С.А.. Программа схемотехнического моделирования Micro-Cap. Версии 9, 10. - Смоленск, Смоленский филиал НИУ МЭИ, 2013. - 618 с., ил.
Изобретение относится к области электротехники и может быть использовано в системах управления шаговыми двигателями (ТТТД) в дискретных электроприводах. Данное техническое решение может применяться преимущественно при решении задачи определения механического упора и установке в начальное положение электропривода с работающим в полношаговом режиме двухобмоточным шаговым двигателем без потери синхронизма. Техническим результатом является упрощение и расширение области применения, снижение аппаратных и программных затрат и повышение помехозащищенности. Способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем (ШД) основан на характерном изменении сигнала, пропорционального сумме действующих значений напряжений на обмотках ТТТД, при встрече ротора ТТТД с препятствием. Для определения механического упора электропривода после поступления управляющего сигнала на выполнение шага на участке свободных колебаний ротора шагового двигателя определяют период пульсаций суммы действующих значений напряжений на обмотках шагового двигателя ненагруженного электропривода. А при движении ротора в сторону механического упора измеряют величину периода этих пульсаций на каждом текущем шаге и, когда измеренная величина превысит заданное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора. При этом напряжение на каждом выводе каждой обмотки измеряют относительно отрицательного вывода источника питания драйвера. Для реализации предлагаемого способа разработано устройство. Изобретение позволяет упростить процесс получения и преобразования информации для принятия решения о достижении электроприводом механического упора. Это соответственно позволяет упростить устройство, реализующее способ определения момента достижения электроприводом механического упора, и приводит к снижению аппаратных и программных затрат. Повышение помехозащищенности достигается за счет использования информационного параметра, который резко изменяет свое значение при касании ротора ШД механического упора. Расширение области применения достигается возможностью его включения в отработанную и эксплуатирующуюся систему управления приводом без доработки драйвера ТТТД. 2 н. и 4 з.п. ф-лы, 4 ил.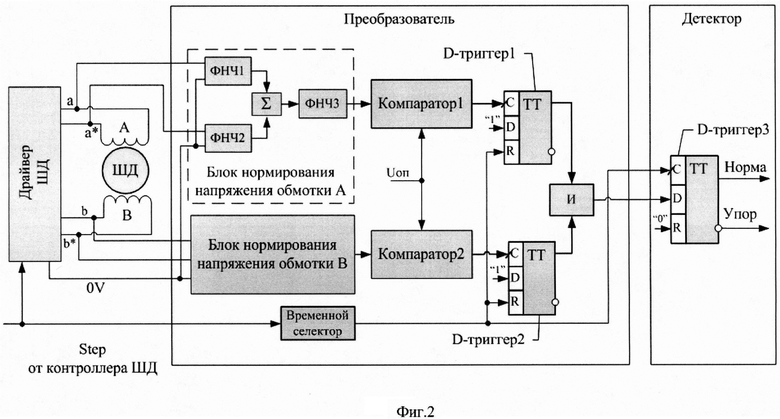
1. Способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, работающим в полношаговом режиме, основанный на определении синхронно с выполнением шага информационного параметра процессов изменения напряжений на обмотках шагового двигателя на текущем шаге при движении ротора в сторону механического упора и формировании признака достижения ротором шагового двигателя механического упора, когда параметр процессов изменения напряжения соответствует некоторому заранее выбранному критерию, отличающийся тем, что после поступления управляющего сигнала на выполнение шага на участке свободных колебаний ротора шагового двигателя определяют нормированные значения напряжений на обеих обмотках шагового двигателя и сравнивают каждое из них с заданным пороговым значением на отрезке наблюдения, вмещающем от полутора до двух периодов собственных колебаний ротора ненагруженного электропривода и отстоящем от момента подачи управляющего сигнала на интервал времени, достаточный для изменения полярности тока в активной фазе шагового двигателя, и, если на отрезке наблюдения хотя бы одно из нормированных значений напряжений не превысит заданное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора, причем нормированное значение напряжения на обмотке определяют как сумму сглаженных фильтрами нижних частот потенциалов на ее выводах относительно отрицательного вывода источника питания драйвера.
2. Способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем по п. 1, отличающийся тем, что интервал времени, достаточный для изменения полярности тока в активной фазе шагового двигателя, принимают равным 0,8 периода собственных колебаний ротора ненагруженного электропривода.
3. Способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем по п. 1, отличающийся тем, что выбирают постоянную времени фильтров нижних частот в восемь раз меньше периода собственных колебаний ротора ненагруженного электропривода.
4. Способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем по п. 1, отличающийся тем, что пороговое значение напряжения принимают равным 0,75 от величины первого максимума на отрезке наблюдения нормированного значения напряжения на обмотке, в которой не производилось изменение полярности тока, при собственных колебаниях ротора ненагруженного электропривода после подачи управляющего сигнала.
5. Устройство определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, связанное с контроллером шагового двигателя, его драйвером и обмотками и содержащее последовательно соединенные преобразователь с пятью вводами, соединенными с соответствующими выводами обмоток шагового двигателя и источника питания драйвера, и детектор, отличающееся тем, что преобразователь и детектор снабжены дополнительными входами, а преобразователь содержит два блока нормирования напряжения обмотки шагового двигателя, два компаратора, источник опорного напряжения, временной селектор, два D-триггера и элемент «И», причем вводы блоков нормирования напряжений обмоток соединены с соответствующими выводами обмоток шагового двигателя и источника питания драйвера, прямые входы компараторов соединены с соответствующими выходами блоков нормирования напряжений обмоток, а их инверсные входы - с выходом источника опорного напряжения, вход временного селектора является дополнительным входом преобразователя и соединен с соответствующим выходом контроллера шагового двигателя, входы сброса первого и второго D-триггеров соединены с выходом временного селектора, входы данных первого и второго D-триггеров соединены с источником высокого логического потенциала, а их тактовые входы - с выходами соответствующих компараторов, прямые выходы первого и второго D-триггеров соединены с входами элемента «И», выход которого является выходом преобразователя и соединен с входом детектора, а детектор выполнен в виде D-триггера, вход сброса которого соединен с источником низкого логического потенциала, вход данных является входом детектора и соединен с выходом элемента «И», а тактовый вход является дополнительным входом детектора и соединен с выходом временного селектора, прямой и инверсный выходы D-триггера являются выходами детектора.
6. Устройство определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем по п. 5, отличающееся тем, что каждый блок нормирования напряжения на обмотке шагового двигателя содержит три фильтра нижних частот и сумматор, причем вводы первого и второго фильтров нижних частот соединены с выводами соответствующей обмотки шагового двигателя и отрицательным выводом источника питания драйвера, а их выходы - с входами сумматора, выход которого соединен с входом третьего фильтра нижних частот, выход которого является выходом блока нормирования напряжения на обмотке шагового двигателя.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Способ старт-стопного управления шаговым двигателем и устройство для его осуществления | 1987 |
|
SU1642579A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| DE 102014108637 A1, 24.12.2015 | |||
| FR 2861924 A1, 06.05.2005 | |||
| JPS 63234898 A, 30.09.1988 | |||
| US 7880423 B2, 01.02.2011 | |||
| US 10075113 B2, 11.09.2018 | |||
| WO 03105332 A1, 18.12.2003. | |||

