Используется в системах цифрового дискретного электропривода с 2-фазным шаговым электрическим двигателем, требующих точного позиционирования исполнительного устройства на широком диапазоне частот, в частности: станки с ЧПУ, роботы и т.д.
Предложенный способ относится к области разработки алгоритмов управления шаговыми электрическими двигателями цифрового дискретного электропривода систем и комплексов.
Известен способ управления шаговым двигателем, включающий импульсную модуляцию фазных напряжений путем изменения частоты подачи управляющих импульсов с периодическим изменением скважности напряжений (Итоги науки и техники, серия "Электропривод и автоматизация промышленных установок", - М., 1978, т. 6, с. 84-85). Фазные обмотки подключаются к источникам питания с помощью ключей. Ключи управляются выходным напряжением триггера, на установочные входы которого поступают две последовательности сдвинутых по фазе импульсов с частотами f1 и f2.
Другим близким аналогом является способ управления шаговым двигателем, заключающийся в том, что осуществляют импульсную модуляцию фазных напряжений, изменяя скважность управляющих импульсов путем изменения длительности указанных импульсов (патент Великобритании N 2165107, Н02Р 8/00, 1986). Управление шаговым двигателем осуществляется путем периодического подключения фазных обмоток к источнику питания путем управления ключами, через которые фазные обмотки подключены к источнику питания. Управление осуществляется таким образом, что обеспечивается возрастание напряжения и токов в фазах ступенями от нуля до максимума с последующим уменьшением такими же ступенями до нуля. Напряжение каждой ступени формируется за счет изменения длительности импульсов, а при неизменной частоте, следовательно, и скважности импульсов в пределах соседних ступеней. При этом длительность (скважность) импульсов в пределах одной ступени остается неизменной.
Для реализации указанных способов необходимо иметь импульсы различной длительности, причем, чем большая точность требуется, тем больше значений необходимо запомнить. При создании устройства управления, реализующего данный способ на микропроцессоре, потребуется его высокое быстродействие. А при управлении несколькими двигателями создание такого устройства станет проблематичным.
Прототипом изобретения является патент РФ 2119237 С1 МПК8 Н02Р 8/22, опубликованный 20.09.1998. Представленный в нем способ заключается в том, что осуществляют импульсную модуляцию фазных напряжений на обмотках двигателя, изменяя скважность управляющих импульсов, подаваемых на коммутатор, подключающий фазные обмотки к источнику питания, путем изменения длительности этих импульсов. Указанную длительность формируют как сумму соответствующих импульсов из ряда эталонных (весовых) импульсов, длительности которых различаются в кратное число раз, равное двум. При этом на обмотках формируется требуемое напряжение. Данный способ относится к способам управления с электрическим дроблением шага. Принцип электрического дробления шага шагового двигателя с ограниченным числом фаз и полюсов основан на управлении пространственной ориентацией вектора результирующего поля в рабочем зазоре посредством модуляции фазных напряжений (токов) внутри основного периода коммутации. Это приводит к увеличению числа электрических состояний и в пределе сводится к непрерывному изменению токов в его обмотках, что позволяет получать низкие и сверхнизкие скорости движения и уменьшать величину основного шага. Указанный технический результат достигается тем, что в способе управления шаговым двигателем, при котором осуществляют импульсную модуляцию фазных напряжений, изменяя скважность управляющих импульсов путем изменения длительности указанных импульсов, длительность управляющих импульсов формируют как сумму соответствующих импульсов из ряда весовых импульсов, длительности которых отличаются в кратное число раз, равное двум, формируя при этом требуемое значение напряжения на обмотках двигателя.
Для реализации этого способа необходимо сформировать эталонные (весовые) импульсы, длительности которых различаются в два раза. Для изменения напряжения на фазах двигателя от нуля до максимума и снова до нуля ступенями скважностью импульсов в пределах одной ступени изменяют. При этом частота импульсов не изменяется, поэтому скважность меняется за счет изменения длительности импульсов.
Недостатки прототипа вызваны применением режима электрического дробления шага, недостатками которого являются:
- ограничение максимальной частоты вращения ротора, возникающее из-за того, что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что ведет к росту тепловых потерь в двигателе;
- падение величины максимального момента двигателя, т.к. обмотки двигателя запитываются не максимальным значением тока, а его уровнями.
Технической задачей является увеличение точности позиционирования дискретного электропривода, путем предотвращения явления резонанса шагового двигателя на соответствующих частотах напряжения питания.
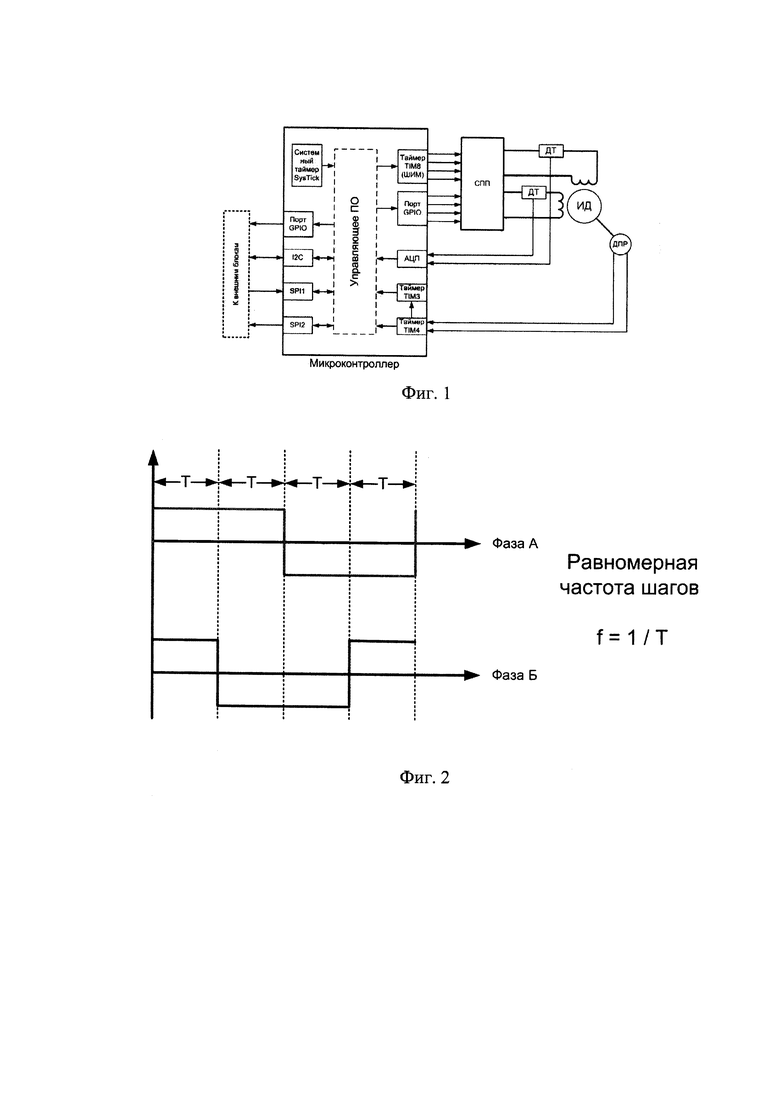
Фиг. 1. Функциональная схема цифрового дискретного электропривода.
Фиг. 2. Диаграмма фазных напряжений на обмотках 2-фазного шагового двигателя при полношаговом режиме управления.
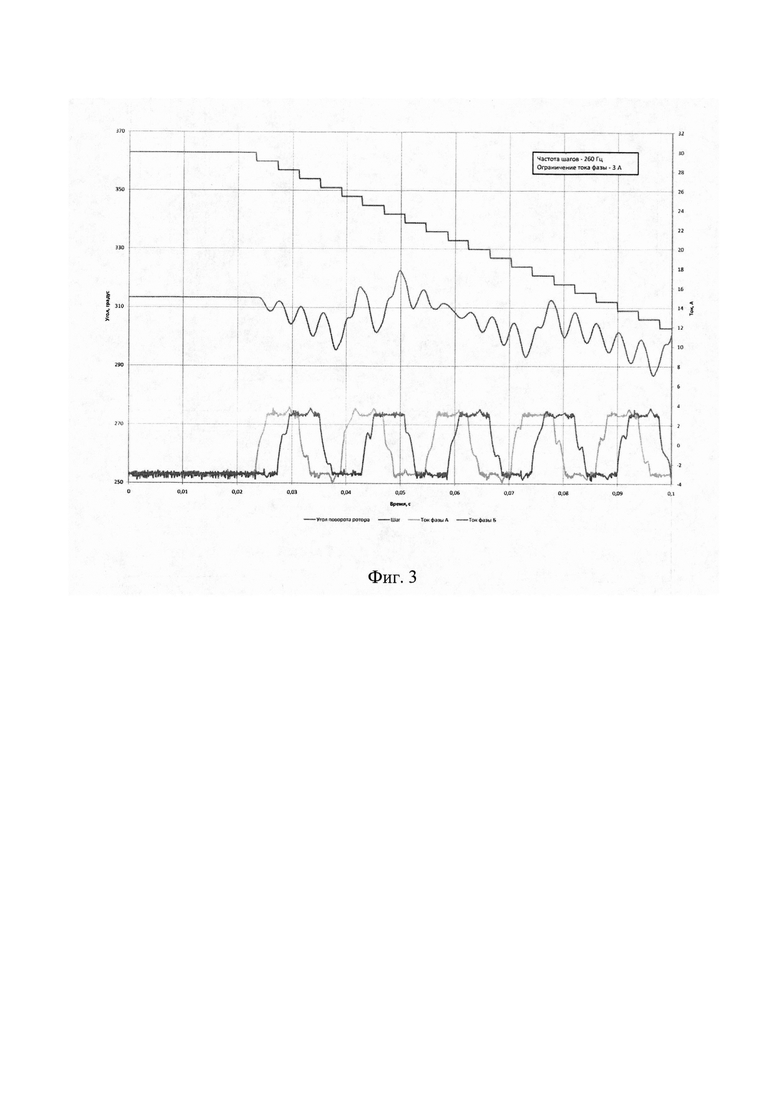
Фиг. 3. Переходные процессы по углу поворота ротора и токам в обмотках фаз 2-фазного шагового двигателя при полношаговом режиме управления на резонансной частоте с пропуском шагов.
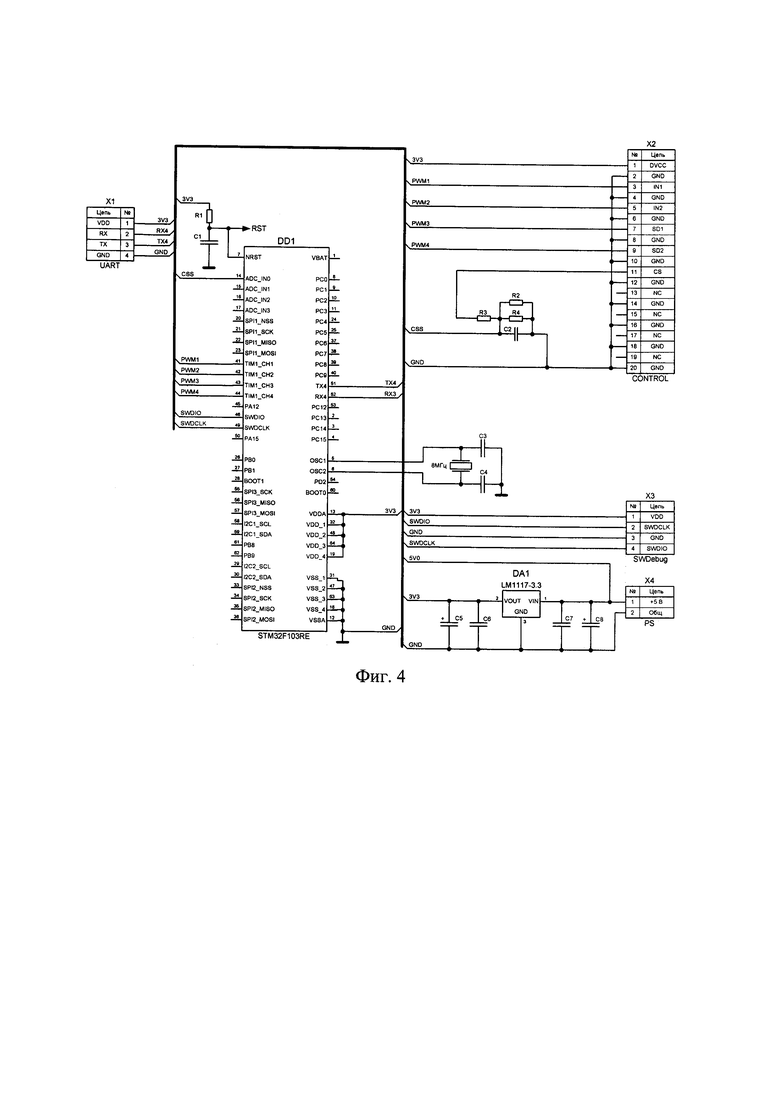
Фиг. 4. Электрическая принципиальная схема микропроцессорной системы управления цифрового дискретного электропривода.
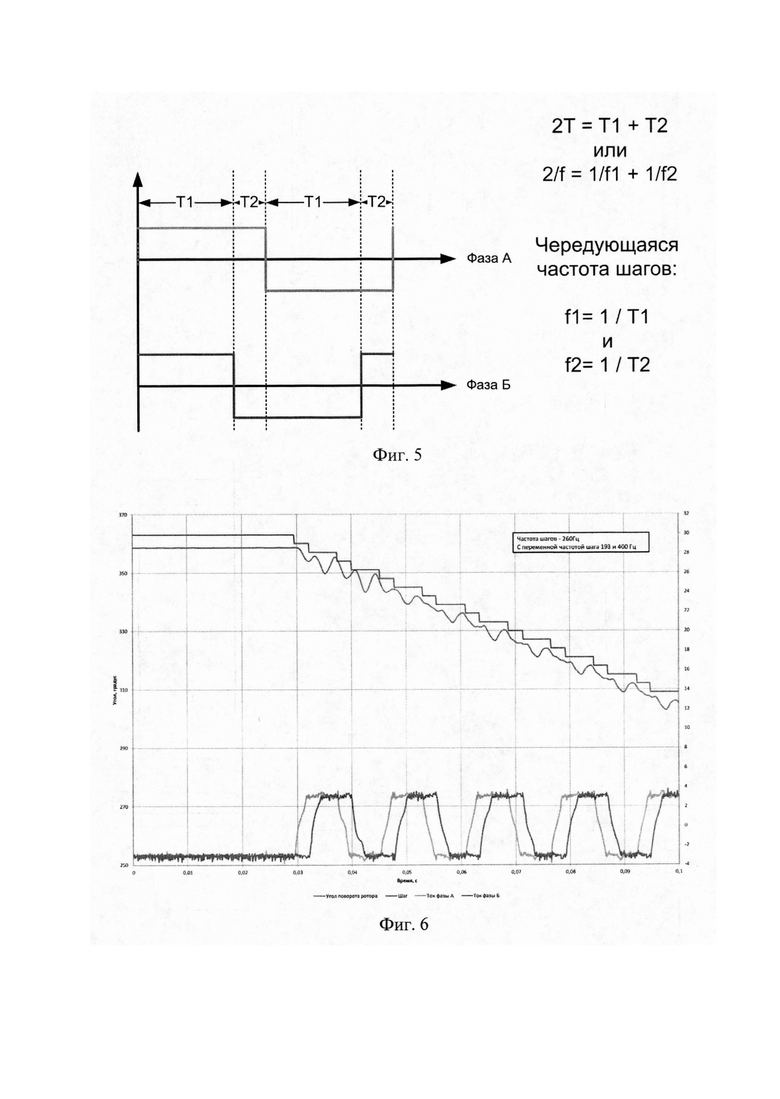
Фиг. 5. Диаграмма фазных напряжений на обмотках 2-фазного шагового двигателя при заявленном способе управления.
Фиг. 6. Переходные процессы по углу поворота ротора и токам в обмотках фаз 2-фазного шагового двигателя при заявленном способе управления.
Поставленная задача заключается в том, что предложен способ управления 2-фазным шаговым электрическим двигателем, при котором осуществляют импульсную модуляцию фазных напряжений на обмотках двигателя при частоте и скважности импульсов, не изменяют скважность управляющих импульсов питающего напряжения, подаваемых на силовой полупроводниковый преобразователь цифрового дискретного электропривода, изменяют смещение периода их подачи между фазами, число электрических состояний на заданный период не изменяется и соответствует режиму управления без электрического дробления шага, частоту шагов последовательно чередуют при условии сохранения их количества на заданный период.
Способ осуществляется следующим образом.
При стандартном способе управления 2-фазным шаговым электрическим двигателем в режиме полного шага при помощи силового полупроводникового преобразователя (СПП), входящего в состав системы цифрового дискретного электропривода (фиг. 1), подаются прямоугольные напряжения частотой 1/4Т на обмотку каждой из фаз, смещенные друг относительно друга на период 2Т (фиг. 2), однако на частоте резонанса это приводит к пропуску шагов (фиг. 3).
Предлагаемый способ состоит в следующем, на частотах, близких к резонансной, предлагается с помощью микропроцессорной системы управления (МПСУ) (фиг. 4) программно реализовать алгоритм подачи управляющих импульсов на СПП цифрового дискретного электропривода, позволяющий не меняя фазные напряжения в пределах каждой из фаз, а именно сохраняя их частоту на уровне 1/4Т, изменить взаимное смещение фазных напряжений (фиг. 5).
Предложенное техническое решение позволяет, сохранив общее число шагов на периоде 4Т, а следовательно, и номинальную скорость вращения ротора, последовательно чередовать частоту шагов в пределах одного периода, вследствие чего предотвратить попадание значения частоты подачи управляющих импульсов в область резонансной частоты и предотвратить появление резонанса шагового двигателя (фиг. 6).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2119237C1 |
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1981 |
|
SU993428A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2719604C1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1042151A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Устройство для управления @ -фазным шаговым двигателем | 1982 |
|
SU1073872A1 |
| Устройство для программного управления @ -фазным шаговым двигателем | 1985 |
|
SU1418655A2 |
Изобретение относится к области электротехники и может быть использовано в системах цифрового дискретного электропривода с 2-фазным шаговым электрическим двигателем, требующих точного позиционирования исполнительного устройства на широком диапазоне частот, в частности: станки с ЧПУ, роботы и т.д. Техническим результатом является увеличение точности позиционирования дискретного электропривода, путем предотвращения явления резонанса шагового двигателя на соответствующих частотах напряжения питания. В способе управления 2-фазным шаговым электрическим двигателем, при котором осуществляют импульсную модуляцию фазных напряжений на обмотках двигателя при частоте и скважности импульсов, не изменяют скважность управляющих импульсов питающего напряжения, подаваемых на силовой полупроводниковый преобразователь цифрового дискретного электропривода, изменяют смещение периода их подачи между фазами, число электрических состояний на заданный период не изменяют и соответствуют режиму управления без электрического дробления шага, частоту шагов последовательно чередуют при условии сохранения их количества на заданный период. 6 ил.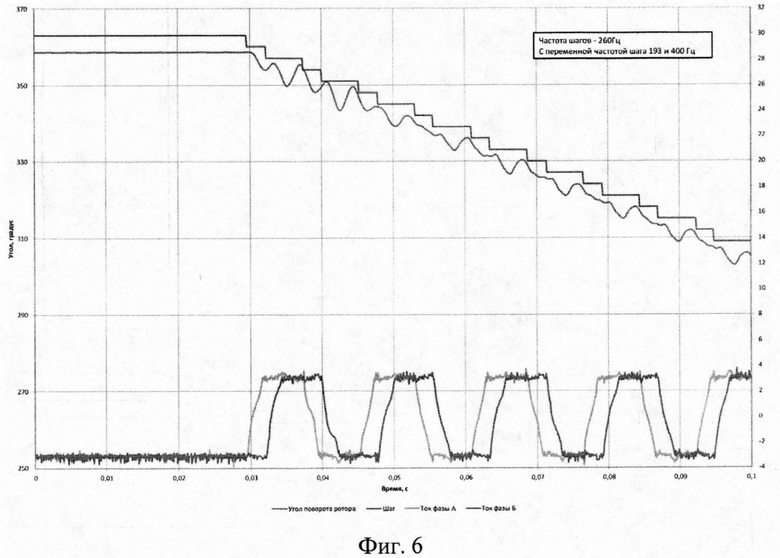
Способ управления 2-фазным шаговым электрическим двигателем, при котором осуществляют импульсную модуляцию фазных напряжений на обмотках двигателя при частоте и скважности импульсов, отличающийся тем, что не изменяют скважность управляющих импульсов питающего напряжения, подаваемых на силовой полупроводниковый преобразователь цифрового дискретного электропривода, изменяют смещение периода их подачи между фазами, число электрических состояний на заданный период не изменяется и соответствует режиму управления без электрического дробления шага, частоту шагов последовательно чередуют при условии сохранения их количества на заданный период.
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2119237C1 |
| СХЕМА ПРИВОДА ШАГОВОГО ДВИГАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ШАГОВОГО ДВИГАТЕЛЯ | 2004 |
|
RU2357354C2 |
| Прокатный стан для изготовления теплоизоляционных минераловатных скорлуп | 1959 |
|
SU131254A1 |
| СИСТЕМА ЗАЩИТЫ ЗАЩИТНОЙ ОБОЛОЧКИ РЕАКТОРНОЙ УСТАНОВКИ ВОДО-ВОДЯНОГО ТИПА | 1999 |
|
RU2165107C2 |
| DE 19521445 A1, 19.12.1996 | |||
| JP 3540123 B2, 07.07.2004 | |||
| US 7362072 B2, 22.04.2008 | |||
| Способ получения порошков быстро-РЕжущиХ СТАлЕй | 1978 |
|
SU837554A1 |

