Изобретение относится к оптико-электронному приборостроению, а именно к устройствам измерения углового положения и перемещения объектов.
Известно устройство-аналог для измерения угловых перемещений, содержащее подвижный и неподвижный круговые растры, расположенные между излучателем с конденсором и фотоэлектрическим преобразователем, подключенным к усилителю [1].
В известном устройстве для получения счетных импульсов используется модуляция светового потока группой штрихов подвижного и неподвижного растров, а нулевой импульс (или импульс начала отсчета) образуется при совпадении одиночного штриха подвижного растра с одиночным штрихом неподвижного растра. При этом при перекрытии одного штриха неподвижного растра одним штрихом подвижного растра крутизна сигнала в канале нулевого импульса во много раз меньше крутизны сигнала в канале счетных импульсов. Все это приводит к низкой точности и ненадежности измерения и является недостатком устройства. Недостатками этого устройства является также отсутствие информации об угловом положении объекта при включении питания и ее исчезновение при выключении питания.
Наиболее близким к изобретению по технической сущности является устройство фотоэлектрического преобразователя ФП-IIВ [2], выбранное в качестве прототипа и содержащее подвижную систему, состоящую из вала с жестко закрепленным на нем кодовым лимбом. Лимб представляет собой стеклянное основание с нанесенными на него концентрическими кодовыми дорожками с прозрачными и непрозрачными сегментами. Система считывания информации включает облучающий блок, состоящий из источника излучения и конденсора. Воспринимающий блок - фотоприемное устройство изготовлен совместно со щелевой диафрагмой. В корпусе преобразователя смонтированы электронные схемы, содержащие усилители и дискриминаторы уровней сигналов.
Основным недостатком этого устройства является сложность изготовления кодовых лимбов и связанная с этим большая трудоемкость. Кроме того, недостатком известного устройства является невозможность определения углового положения объекта с высоким разрешением, а также невозможность восстанавливать информацию при каждом цикле опроса.
Задачей предлагаемого изобретения является повышение разрешающей способности устройства при сохранении высокой помехозащищенности и возможности восстановления информации об угловом положении объекта при возможных сбоях в работе. Кроме того, задачей предлагаемого изобретения является упрощение конструкции устройства и связанное с этим уменьшение стоимости преобразователя, определяемое прежде всего простотой изготовления одного из основных элементов преобразователя - кодового лимба.
Для решения поставленной задачи предложен преобразователь угловых перемещений, который содержит подвижную систему, состоящую из кодового лимба, жестко закрепленного на валу; систему считывания информации, состоящую из источника излучения, конденсора и фотоприемного устройства, а также электронного блока, вход которого связан с выходами фотоприемного устройства. Однако, в отличие от прототипа, в котором на лимб наносится значительное число кодовых дорожек с прозрачными и непрозрачными сегментами, на кодовый лимб в соответствии с предлагаемым изобретением наносится только одна дорожка со штрихами, а угловое расстояние между соседними штрихами определяется зависимостью
ϕ(n-1),n= ϕ0,1+γ•(n-1),
где
ϕ0,1 - угловое расстояние между нулевым и первым штрихами;
γ - постоянная угловая величина, превышающая погрeшность определения угла между соседними штрихами;
n= 1, 2, 3... - порядковый номер нанесенных на лимбе штрихов, за исключением нулевого.
В качестве фотоприемного устройства использован многоэлементный приемник изображения линейного типа, светочувствительная зона которого расположена в плоскости, параллельной поверхности кодового лимба. Электронный блок преобразователя представляет собой блок аналого-цифровой обработки и управления.
Сущность изобретения заключается в том, что на лимб наносится только одна кодовая дорожка, выполненная с переменным шагом между штрихами. В сочетании с линейным фотоприемным устройство осуществяется кодирование информации об угловом положении лимба с высоким разрешением, что обеспечивается за счет специального алгоритма обработки изображения штриха (энергетический центр тяжести изображения штриха определяется с погрешностью, состоящей приблизительно 1/30 размера пиксела).
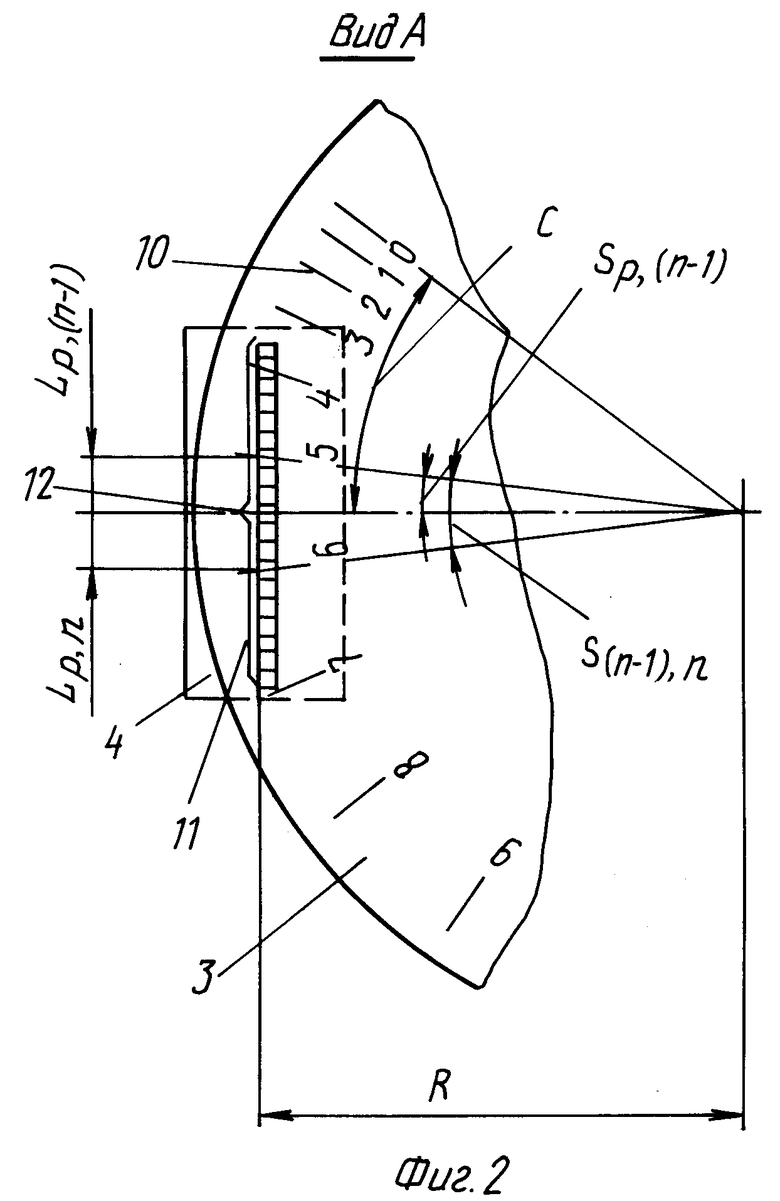
На фиг. 1 изображена принципиальная схема преобразователя угловых перемещений; на фиг. 2 - вид А (на лимб) на фиг.1.
Преобразователь угловых перемещений (фиг. 1) содержит источник излучения 1, конденсор 2, кодовый лимб 3, фотоприемное устройство 4, в качестве которого использован многоэлементный приемник изображения линейного типа, блок 5 аналого-цифровой обработки и управления, состоящий из аналого-цифрового преобразователя 6, блока 7 вычислений, блока 8 синхронизации и формирователя 9 управляющих сигналов. На фиг. 2 обозначения те же, что и на фиг. 1. Кроме того, показаны штрихи 10 на лимбе 3, фоточувствительные элементы 11 многоэлементного приемника изображения линейного типа 4 и фоточувствительный элемент 12, принятый за репер.
Устройство работает следующим образом.
Источник излучения 1 (фиг. 1) с помощью конденсора 2 освещает штрихи 10 (фиг. 2), нанесенные на поверхности кодового лимба 3. Их теневое изображение образуется на фоточувствительных элементах 11 (фиг. 2) многоэлементного приемника изображения 4. На фоточувствительные элементы 11 проецируется не менее двух штрихов. В фотоприемном устройстве 4 осуществляется преобразование пространственного расположения изображений штрихов во временную последовательность амплитудно-модулированных видеоимпульсов, взаимное временное положение которых однозначно соответствует расстоянию между спроецированными на фоточувствительные элементы 11 штрихами. Аналого-цифровой преобразователь 6 преобразует амплитуду видеоимпульсов в цифровой код, поступающий в блок 7 вычислений, который осуществляет расчет угловых расстояний между штрихами и обеспечивает (в случае необходимости) вывод информации на индикаторное табло и ввод данных в ЭВМ для дальнейшей обработки. Формирователь 9 управляющих сигналов совместно с блоком 8 синхронизации формирует импульсы управления и обеспечивает синхронную работу всего блока 5 аналого-цифровой обработки и управления.
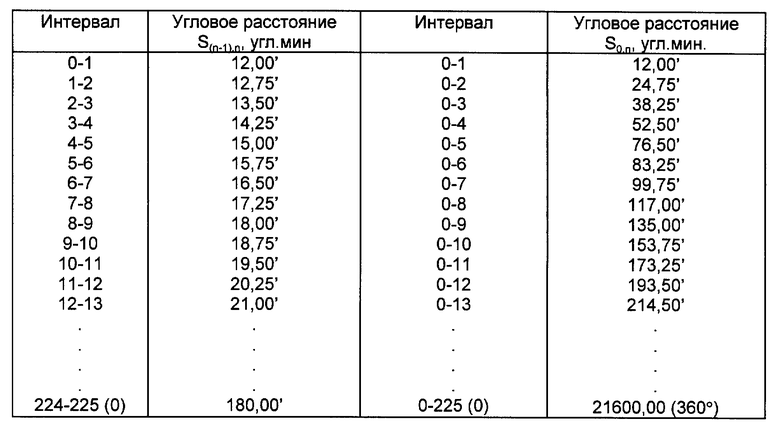
Пусть например, на лимбе 3 (фиг. 2) угловые расстояния между соседними штрихами определяются зависимостью
S(n-1),n=S0,1+γ •(n-1),
при этом угловое расстояние между нулевым и первым штрихами S0,1=12', постоянная величина γ = 0,75' (45"), а n=225 (нулевой и 225-ый штрихи совпадают). Радиус, на котором нанесены штрихи, равен R. Тогда в соответствии с вышеуказанной зависимостью можно составить таблицу.
Пусть, например на фоточувствительные элементы 11 проецируются штрихи NN 4, 5, 6 и пусть фоточувствительный элемент 12, принятый за репер, находится между штрихами N 5 и N 6. Вся таблица находится в памяти блока 7 вычислений (фиг. 1). Так как временная последовательность амплитудно-модулированных видеоимпульсов, формируемых в фотоприемном устройстве, однозначно соответствует линейному расстоянию между штрихами лимба, то легко вычисляются расстояния Lp,n(Lp,6) и Lp,(n-1)(Lp,5)
В блоке 7 вычисления (фиг. 1) определяется на основании вычисленных значений Lp,6 и Lp,5 угловое расстояние S5,6 между штрихами N 5 и N 6 по формуле:
По угловому расстоянию S5,6 из памяти берется угловое расстояние S0,5 между нулевым и пятым штрихами (табл.) и определяется угловое положение C объекта (см. фиг. 2):
Пусть, например, R=55 мм, а Lp,5=0,096 мм.
Тогда
Угловое перемещение объекта равно величине разности двух его положений.
В качестве источника излучения 1 использовался серийно изготавливаемый светоизлучающий диод АЛ 107Б, а в качестве многоэлементного приемника изображения 4 - широко представленные на Российском рынке японские ПЗС-линейки ТСД132, ibx 703. В блоке 5 аналого-цифровой обработки и управления использован микропроцессорный контроллер РХ-188, выпускаемый ОКБ "Спектр", микросхемы серий К555, К561 и другие серийно изготавливаемые электрорадиоэлементы.
Таким образом, предлагаемый преобразователь угловых перемещений, предназначенный для измерения углов поворота и углового положения объекта, в отличие от прототипа, позволяет с высоким разрешением (не хуже 3" при R = 55 мм) определять угловое положение объекта и восстанавливать информацию при каждом цикле опроса. Кроме того, основной элемент заявляемого устройства кодовый лимб очень прост в изготовлении, что также является существенным отличием предлагаемого устройства от прототипа.
Источники информации:
1. Авторское свидетельство СССР N 329552, кл. G 08 C 9/06, публ. БИ N 7, 1972.
2. Л.И.Преснухин и др. Фотоэлектрические преобразователи информации. -М. : Машиностроение, 1974, с. 298-299 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 1999 |
|
RU2220402C2 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЕ-КОД | 2003 |
|
RU2248093C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2602414C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| ФОТОПРИЕМНОЕ УСТРОЙСТВО С КОМПЕНСАЦИЕЙ РАЗБРОСА ПАРАМЕТРОВ ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 1992 |
|
RU2065669C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
Преобразователь угловых перемещений используется для измерения углового положения и перемещения объектов. Преобразователь угловых перемещений содержит подвижную систему, состоящую из жестко закрепленного на валу кодового лимба, и систему считывания информации, состоящую из последовательно расположенных источников излучения, конденсора и фотоприемного устройства. Преобразователь содержит также электронный блок в виде блока аналого-цифровой обработки и управления, вход которого связан с выходами фотоприемного устройства. На кодовый лимб преобразователя наносится одна кодовая дорожка со штрихами. Угловое расстояние между соседними штрихами определяется зависимостью
ϕ(n-1),n= ϕ0,1+γ•(n-1),
где ϕ0,1- угловое расстояние между нулевым и первым штрихами;
γ - постоянная угловая величина, превышающая погрешность определения угла между соседними штрихами;
n = 1, 2, 3... - порядковый номер нанесенных на лимбе штрихов, за исключением нулевого, при этом
[(ϕ0,1+ϕ(n-1Lgn)/2)]•n ≤ 2π.
Светочувствительная зона фотоприемного устройства в виде многоэлементного приемника изображения расположена в плоскости, параллельной поверхности кодового лимба. Преобразователь обеспечивает измерение углов поворота и углового положения объекта с высоким разрешением (не хуже 3'' при R = 55 мм), а также обеспечивает восстановление информации при каждом цикле опроса. 2 ил.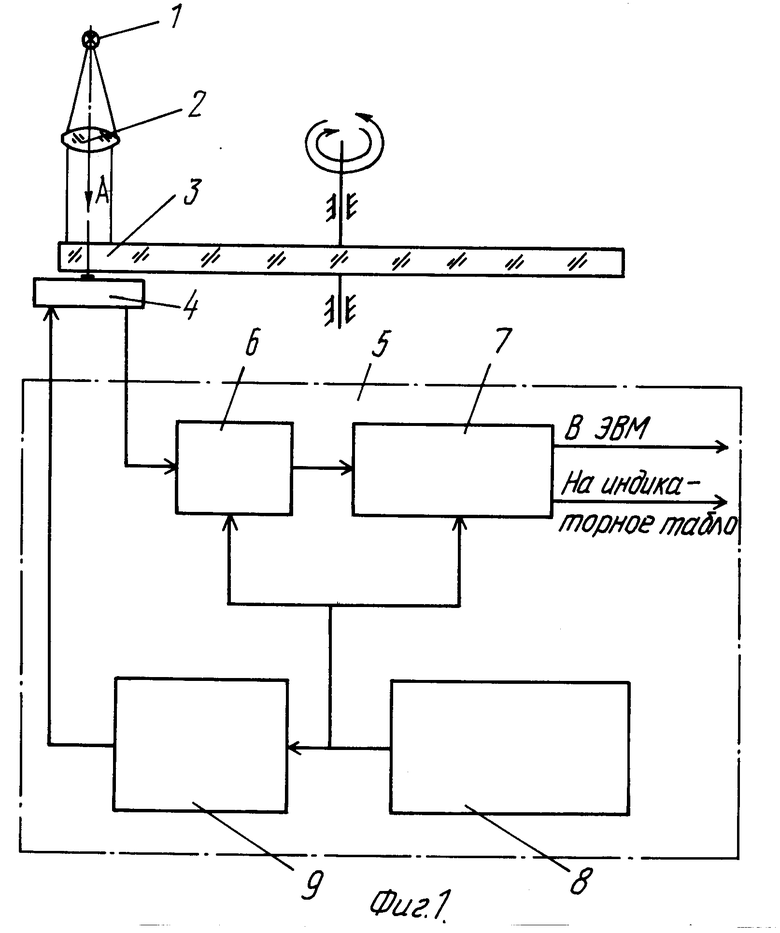
Преобразователь угловых перемещений, содержащий подвижную систему, состоящую из жестко закрепленного на валу кодового лимба, систему считывания информации, состоящую из последовательно расположенных источника излучения, конденсора, фотоприемного устройства, и электронный блок, вход которого связан с выходом фотоприемного устройства, отличающийся тем, что кодовый лимб выполнен таким образом, что угловое расстояние между соседними штрихами определяется зависимостью:
ϕ(n-1),n=ϕ0,1+γ•(n-1),
где ϕ0,1- угловое расстояние между нулевым и первым штрихами;
γ- постоянная угловая величина, превышающая погрешность определения угла между соседними штрихами;
n = 1,2,3... - порядковый номер нанесенных на лимбе штрихов, за исключением нулевого, при этом
в качестве фотоприемного устройства использован многоэлементный приемник изображения линейного типа, светочувствительная поверхность которого расположена в плоскости, параллельной поверхности кодового лимба, а электронный блок представляет собой блок аналого-цифровой обработки и управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, 329552 A, 01.10.70 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Преснухин Л.И | |||
| и др | |||
| Фотоэлектрические преобразователи информации | |||
| - М.: Машиностроение, 1974, с | |||
| РАССЕИВАЮЩИЙ ТОПЛИВО МЕХАНИЗМ | 1920 |
|
SU298A1 |
