к СП
Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений .
Цель изобретения - повьппение точности за счет снижения чувствительности к изменениям частоты и амплитуды питающего напряжения.
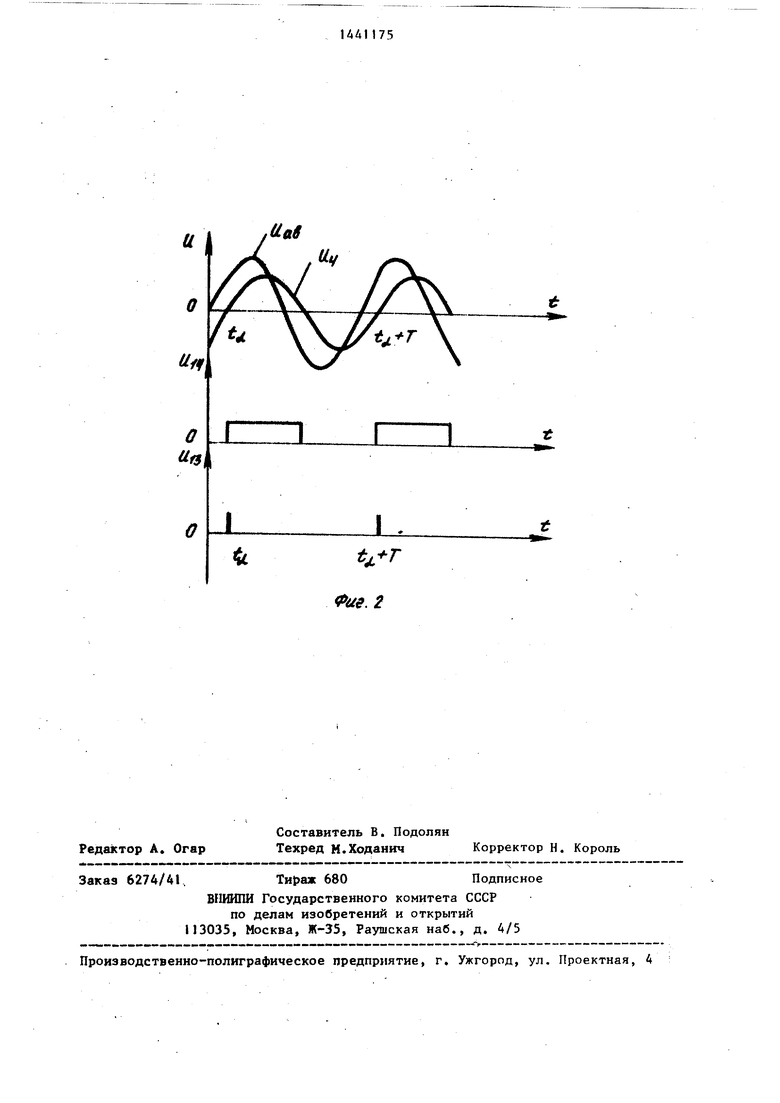
На фиг, I приведена блок-схема преобразователя; на фиг. 2 - временные диаграммы сигналов, характеризующие его работы.
Преобразователь перемещений содержит магнитопроводный якорь 1, рабо- чие обмотки 2 и 3, резисторы 4 и 5, компенсационные обмотки 6 и 7, резисторы 8 и 9, источник 10 переменного напряжения, блоки 11 и 12 выборки- хранения, одновибратор 13, компара- тор 14, блок 15 деления и шину 16 нулевого потенциала.
Рабочие обмотки 2 и 3, компенсационные обмотки 6 и 7 и резисторы 4, 5,8 и 9 образуют мостовую схему, в диагональ которой включен источник 1 переменного напряжения, рабочая обмотка 2 и компенсационная обмотка 6 подключены к информационным входам соответственно блоков II и 12 выбор- ки-хранения, выходы которых подключены к входам блока 5 деления.
Преобразователь работает следующим образом.
На диагональ питания а - Ъ посту- пает выходное напряжение источника 10, питающее мост переменного тока: w 08 mSinuit, где амплитуда; :d) - круговая частота; t - время В диапазоне преобразования зависимости индуктивностей L, и Lj соответственно рабочих обмоток от перемещений якоря 1 вдоль оси X контролируемых перемещений имеют линейный характер:
Lj- ix- LC 1(Хо-«- vt) +
L, -ly+ L -l(Xo+ Vt) + L,,,
где Хд - начальное положение яко- ря 1, относительно которого отсчитывается его перемещение со скоростью V; 170- коэффициент пропорциональности, определяемый пара- метрами дифференциального индуктивного датчика; LO - индуктивность любой из рабочих обмоток 2 и 3, соот
0
5 о
ветствующая нейтральному положению якоря 1, при котором X 0.
Входные сопротивления информационных входов блоков П и 12 выборки- хранения намного превышают вьпсодные сопротивления моста переменного тока на участках ветвей с - b и d - Ь, к которым подключены указанные информационные входы, а выходное сопротивление обоих входов компаратора 11 значительно больше величины активного сопротивления R каждого из резисторов 4,5,8 и 9. Поэтому, подключение входных цепей блоков П и 12 выборки-хранения к вьшодам измерительной диагонали, а также подключение входов компаратора 14 к выводам резистора 4 практически не оказывают влияния на распределение токов и напряжений в схеме моста переменного тока.
Разность фаз напряжения и тока для сопротивления, имеющего индуктивно-активный характер, положительна и не превьшает значения tr/2. Поэтому ток, протекающий по ветви а - с - Ь, может быть представлен в виде функции i (a)t - if), где „,- амплитуда тока i(t); О : - разность фаз напряжения и тока i(t). В диапазоне преобразования суммарная индуктивность рабочих обмоток 2 и 3 постоянна и равна L, 2Lp. Следовательно, неизменными являются также
m
2(mLj4 (г + R)
(/ arctgQ,
.e
где ---Г - добротность, г к
Величина тока i(t) I sinCwt -i/) принимает нулевое значение в моменты времени
Ilk
ot ш
0,5kT,
где t,ft arctg Q/u; Т () - период;
k - целое число или
нуль.
Соответственно, в моменты t обращаются в нуль значения составляющей Uv (Iv -i-R), а также падения напряжения на резисторе 4 U iR (фиг. 2).
Однрвибратор 13, запускаемый по воздействию на его вход положитель- ных фронтов выходных импульсов и компаратора 14 (фиг. 2), вырабатывает короткие импульсы 11 ,j , поступающие на управляющий вход Злока 11 выборки-хранения, выходной сигнал U которого представляет собой напряжение Upg , дискретизуемое в моменты t 1 t + kT + 0,5kT, т.е. и„
Uce(tk).
Поскольку составляющая U в моменты 11. , а следовательно, и при t jj , 0,5kT, становится равной нулю, то и само напряжение U , Uce (tfc) U(tt) wljl + LC) не зависит от скорости движения якоря 1 и пропорционально лишь координате X якоря 1, отсчитываемой по оси контролируемых перемещений.
Индуктивность .каждой из компенсационных обмоток 6 и 7 и активное сопротивление каждого из резисторов 8 и 9 подобраны равными соответственно величинам Lj, и R так, что с учетом указанного равенства величин активных сопротивлений обмоток 2,3,6 и 7 можно сделать вьшод о том, что в ветвях a-d-Ьиа-с-Ь протекают равные между собой токи.
Полностью аналогично описанному для электрических процессов в ветви а - с - b в моменты времени 2 t д( + О, 5kT составляющая U „ напряжения и06 обращается в нуль, посколь ку ток i ветви а - с - b в моменты С, принимает нулевое значение и, кро ме того, токи в ветвях а - с - b и а - d - b одинаковы.
Выходной сигнал блока 15 деления пропорционален отношению уровней нап ряжений 11, и .
и
1У
+ 1),
где Кц E/LO;
Ку- масштабный коэффициент.
Величины амплитуды тока 1, пропорциональной амплитуде питающего напряжения V, и частоты f W/2ff питающего напряжения находятся как в числителе, так и в знаменателе отношения Uii/Ufi и поэтому сокращаются. Следовательно, и колебания величины Vfn, f не оказывают влияния на уровень и 1J, пропорциональный коорди
10
15
20
25
30
3
ло
45
50
55
нате X якоря 1 и не зависящий от скорости движения контролируемого объекта, координаты К(, К определяются внутренними параметрами дифференциального датчика и блока 15 деления и от колебаний амплитуды и частоты питающего напряжения практически не зависят.
Формула изобретения
Преобразователь перемещений, содержащий источник переменного напряжения, две рабочие обмотки, первый и второй резисторы, одновибратор, первый блок выборки-хранения, шину нулевого потенциала и магнитопровод- ный якорь, размещенный в магнитном поле рабочих обмоток, первый вывод источника переменного напряжения подключен к началу первой рабочей обмотки, второй вьюод источника переменного напряжения подключен к шине нулевого потенциала и первому выводу первого резистора, начало второй рабочей обмотки подключено к информационному входу первого блока выборки-хранения, к управляющему входу которого подключен выход одно- вибратора, отличающийся тем, что, с целью повышения точности, в него введены две компенсационные обмотки, третий и четвертый резисторы, второй блок выборки-хранения, компаратор и делитель, первый выход источника переменного напряжения через последовательно включенные первую компенсационную обмотку, тре тий резистор, вторую компенсационную обмотку и второй резистор подключен к шине нулевого потенциала и первому входу компаратора, выход которого подключен к входу одновибратора, выход которого подключен к управляющему входу второго блока выборки-хранения, выход которого подключен к первому входу делителя, начало второй компенсационной обмотки подключено к информационному входу второго блока выборки-хранения, конец первой рабочей обмотки через последовательно включенные четвертый резистор и вторую рабочую обмотку подключен к второму выводу первого резистора, выход первого блока выборки-хранения подключен к второму входу блока де- f ления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1988 |
|
SU1518661A1 |
| Преобразователь перемещений | 1990 |
|
SU1768935A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Устройство измерения перемещений | 1990 |
|
SU1779906A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1983 |
|
SU1146540A1 |
| Преобразователь перемещений в код | 1988 |
|
SU1559406A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| Преобразователь угловых перемещений | 1987 |
|
SU1543223A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2366892C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений. С целью повышения точности путем снижения чувствительности к изменениям амплитуды и частоты питающего напряжения в преобразователь. содержащий магнитопроводный якорь i, рабочие обмотки 2,3, резисторы 4,5, источник 10 переменного напряжения, блок I1 выборки-хранения, одновиб- ратор 13, шину 16 нулевого потенциала, введены компенсационные обмотки 6,7, резисторы 8,9, блок 12 выборки-хранения, компаратор 14 и блок деления. Величина сигнала на выходе блока 15 деления, пропорциональная координате якоря на оси перемещений, не зависит от колебаний амплитуды и изменений частоты питающего напряжения, которые в равной степени влияют на уровни сигналов, снимаемых с первого и второго выводов диагонали измерительного моста, образованного обмотками 2,3,6,7 и резисторами 4,5,8,9. 2 ил. W
. 2
| Трансформаторный преобразователь перемещений | 1984 |
|
SU1239513A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1983 |
|
SU1146540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
