Изобретение относится к технике измерительного преобразования перемещений в электрические сигналы с использованием электромагнитных датчиков.
Известен преобразователь перемещений, содержащий подвижный якорь, распределенную вдоль заданной оси обмотку возбуждения и измерительную обмотку с подключенными к ее секциям резисторами. Перемещения якоря обусловливают изменение положения той секции, в которой наводится максимальная по величине ЭДС, и соответствующее изменение уровня напряжения резистора, подключенного к секции, расположенной возле границы диапазона преобразования.
Недостатком известного устройства являются ограниченные функциональные возможности, что выражается в отсутствии на
его выходе информации о скорости движения якоря.
Известен преобразователь перемещений, содержащий подвижный якорь, пару рабочих обмоток и пару компенсационных элементов, причем рабочие обмотки и компенсационные элементы образуют мостовую схему, измерительная диагональ которой подключена к информационному входу устройства выборки-хранения (УВХ). С управляющим входом УВХ через последовательно включенные формирователь и элемент задержки связан источник переменного напряжения, питающий мостовую схему. Результат дискретизации напряжения измерительной диагонали, осуществляемой УВХ в моменты времени, отстоящие от моментов смены полярности напряжения питания мостовой схемы на засл
данные временные интервалы, определяется положением якоря на оси контролируемых перемещений.
Недостатком известного устройства являются ограниченные функциональные возможности, что обусловлено его неспособностью выдавать выходную информацию о скорости движения якоря.
По своей технической сущности к заявляемому наиболее близок преобразователь перемещений, содержащий подвижный якорь, парные рабочие и компенсационные обмотки, каждая из которых последовательно соединена с резистором, причем рабочие и компенсационные обмотки а также резисторы образуют мостовую схему, подключенную к источнику переменного напряжения. Измерительная диагональ мостовой схемы соединена с первым и вторым информационными входами блока дискретизации, состоящего из двух УВХ (их информационные входы являются информационными входами, а выходы - выходами блока дискретизации в целом), последовательно включенных компаратора и одновиб- ратора, выходной сигнал которого управляет выборкой напряжений с выводов измерительной диагонали, осуществляемой первым и вторым УВХ в моменты смены полярности напряжения первого резистора, подключенного ко входу компаратора - управляющему входу блока дискретизации. Выходной сигнал блока деления, подключенного к выходам блока дискретизации, по величине пропорционален отношению дис- кретизированных первым и вторым УВХ напряжений, а также координате якоря; его уровень не зависит от колебаний амплитуды и частоты напряжения питания мостовой схемы.
Недостатком устройства-прототипа являются ограниченные функциональные возможности, что обусловлено его неспособностью выдавать информацию о скорости движения якоря.
Цель изобретения - расширение функциональных возможностей за счет формирования дополнительной информации о скорости движения якоря.
Поставленная цель достигается тем, что преобразователь перемещений, содержащий подвижный якорь, две рабочие обмотки и первый резистор, соединенные последовательно и образующие два смежных плеча мостовой измерительной схемы, две компенсационные обмотки и второй резистор, соединенные последовательно и образующие два других смежных плеча мостовой измерительной схемы, источник переменного напряжения, включенный в диагональ
мостовой измерительной схемы, первый блок деления, первый блок дискретизации, выходы которого соединены с входами первого блока деления, а управляющий вход
первого блока дискретизации подключен к точке соединения первого резистора и рабочей обмотки, снабжен блоком вычитания, блоком дифференцирования, вторым блоком деления и вторым блоком дискретиза0 ции, точки соединения рабочих и компенсационных обмоток соединены с соответствующими входами блока вычитания, выход которого соединен с первыми информационными входами первого и второго
5 блоков дискретизации, второй информационный вход первого блока дискретизации подключен к точке соединения компенсационных обмоток, второй информационный вход второго блока дискретизации объеди0 нен с входом блока дифференцирования и подключен к общей точке соединения первого резистора и рабочей обмотки, выход блока дифференцирования соединен с управляющим входом второго блока дискрети5 зации, выходы которого соединены с входами второго блока деления, а выходы первого и второго блоков деления являются выходами преобразователя.
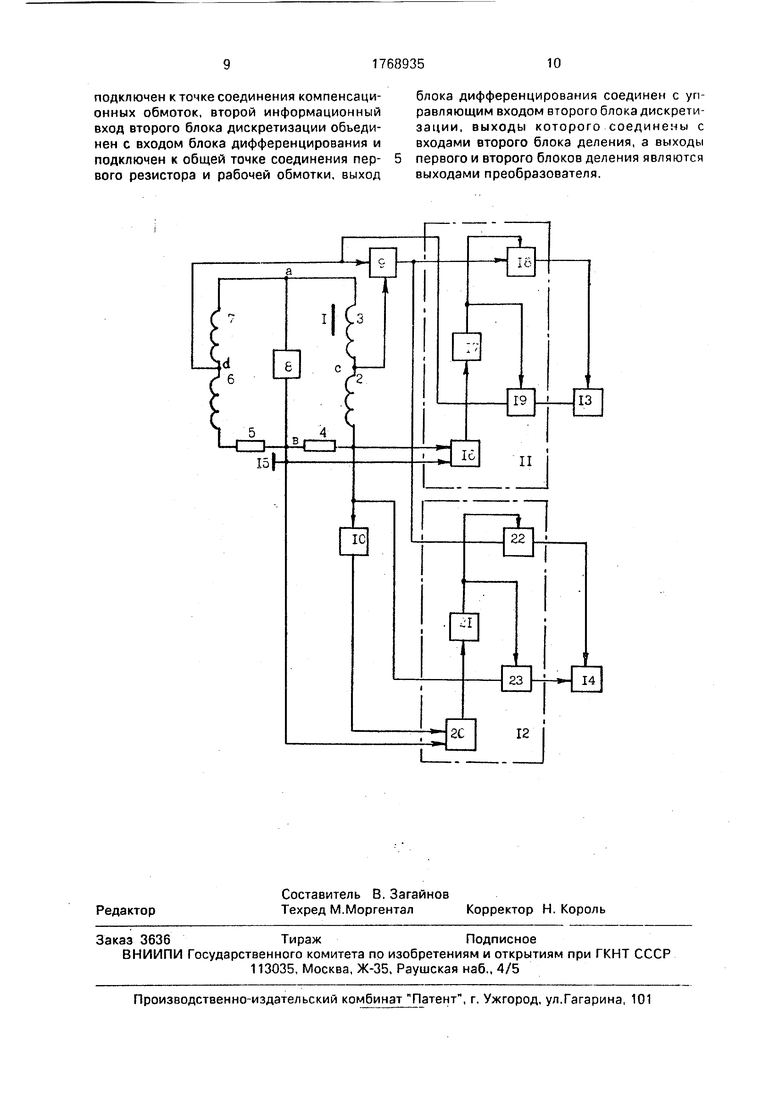
На чертеже изображена схема устройст0 ва.
Преобразователь перемещений содержит магнитопроводный якорь 1, первую 2 и вторую 3 рабочие обмотки, первый А и второй 5 резисторы первую 6 и вторую 7 ком5 пенсационные обмотки, источник 8 переменного напряжения, блок 9 вычитания, блок 10 дифференцирования, первый 11 и второй 12 блоки дискретизации, первый 13 и второй 14 блоки деления;шину 15 нуле0 вого потенциала. Блок 11 состоит из первого компаратора 16, первого одновибратора 17, первого 18 и второго 19 устройств выборки- хранения УВХ; блок 12 состоит из второго компаратора 20, второго одновибратора 21,
5 третьего 22 и четвертого 23 УВХ.
Рабочие обмотки 2 и 3, резисторы 4 и 5, компенсационные обмотки 6 и 7 образуют мостовую схему, в диагональ питания которой включен источник 8. Общий вывод рабо0 чих обмоток 2 и 3 подключен к первому (нижнему по фиг. 1) входу блока 9, выход которой соединен с информационными входами первого 18 и третьего 22 УВХ. Общий вывод компенсационных обмоток 6 и 7 под5 ключей ко второму левому по фиг. 1 входу схемы 9, а также к информационному входу второго УВХ 19. Вывод резистора 4, общий с выводом рабочей обмотки 2, подключен к информационному входу четвертого УВХ 23, к первому верхнему по фиг. 1 входу первого
компаратора 16 и ко входу блока 10, выход которой связан с первым (верхним) входом второго компаратора 20; вторые нижние входы компараторов 18 и 20 соединены с шиной 15.
Выход первого компаратора 16 через первый одновибратор 17 связан с управляющими входами первого 18 и второго 19 УВХ, выходы которых подключены ко входам соответственно делителя и делимого блока 13; выход второго компаратора 20 через второй одновибратор 21 связан с управляющими входами третьего 22 и четвертого 23 УВХ (функциональные схемы блоков 11 и 12 одинаковы), выходы которых подключе- ны ко входам соответственно делителя и делимого блока 14.
Информационные входы первого 18 и второго 19 УВХ являются соответственно первым и вторым информационными входа- ми блока 11, а информационные входы третьего 22 и четвертого 23 УВХ - первым и вторым информационными входами блока 12. Первые входы первого 16 и второго 20 компараторов являются управляющими входами соответственно блоков 11 и 12. Выходы первого 18 и второго 19 УВХ являются соответственно первым и вторым выходами блока 11, а выходы третьего 22 и четвертого 23 УВХ - соответственно первым и вторым выходами блока 12,
Устройство работает следующим образом.
Мостовая схема запитывается выходным напряжением источника 8, Ua Vmx xsin ал, где Vm - амплитуда, со- круговая частота, t - время. В пределах диапазона преобразования движение якоря 1 вдоль оси X контролируемых перемещений вызывает разнозначные приращения индуктив- ностей 1.2 и соответственно первой 2 и второй 3 рабочих обмоток:
IX + 1(Х0 + Vt) + Le,
U IX + Le -1(Х0 - Vt) + Ц. где Хе - координата якоря 1 на оси X;
Х0 - начальное положение якоря 1, относительно которого он перемещается со скоростью V;
I - коэффициент пропорциональности, определяемый параметрами рабочих обмо- ток (I 0);
Le - балансная индуктивность любой из рабочих обмоток 2 или 3, соответствующая нейтральному положению якоря 1Х 0.
Выходное напряжение каждого элект- ронного узла описываемого устройства: блоков 9 и 10, компараторов 16 и 20, одно- вибраторов 17 и 21, УВХ 18, 19, 22 и 23, а также блоков 19 и 20 ниже будем обозначать с индексом, соответствующим номеру позиции данного узла на ертеже. Блоки 9 и 10, УВХ 18, 19, 22 и 23, компараторы 16 и 20 имеют высокоимпедансные входы и на распределение токов мостовой схемы практического влияния не оказывают.
Амплитуда lm переменного тока, протекающего по рабочим обмоткам -2 и 3, в пределах диапазона преобразования не зависит от положения якоря 1, поскольку сумма их индуктивностей LI + 2Le (a, следовательно, и сумма их индуктивных сопротивлений) не является функцией X, то есть
, Vm
(2r + R)VQ2 + 1
где г - активное сопротивление каждой из рабочих обмоток 2 и 3;
R - активное сопротивление каждого из резисторов 4 и 5;
Q - добротность ветви а-c-b с рабочими обмотками 2 и 3
Q (2tuL6)/(2r+R).
При этом i lmsin(ort - , где р - разность фаз между напряжением UЮ и током I (p arctgQ).
Согласно законам электромагнитной индукции и Ома в последовательном соединении рабочей обмотки 2 и первого резистора 4 выделяется сигнал
Ucb d(L2i)/dt + (г + R)i - Ux + Uv,
Ux L2(di/dt) wlm(lx +
+ L6)sin(ftrt + 0,5 ),
Uv (dLz/dt) + r + (Iv + r +
+R)lmsin( p).
с выводов первого резистора 4 снимается напряжение
U4 iR lmRsin(tot-p).
Магнитному воздействию якоря 1 компенсационные обмотки 6 и 7 не подвергаются. Значение индуктивности каждой из них подбирается равным Le, а значение активного сопротивления-равным г. Поэгомуток ветви d-d-b равен току ветви а-c-b, причем в последовательном соединении первой компенсационной обмотки 6 и второго резистора 5 выделяется напряжение Udb, уровень которого зависит от величин х и v:
Udb L6(di/dt) + (r+R)i, (di/dt) a) LelrnSinf ал + 0.5л: - р)
(г ь R)i(r+R)msin((Ut- р) .1
Блок 9 реализует операцию получения разностного напряжения Ug Ucb - Udb a lmlxsin( йл + 0,5 л - р) + lvlmsin( ил - tf).
Обозначим через К индекс наблюдаемого периода - длительностью Т (2 п/а) - напряжения Ua; К может быть равно нулю или натуральному числу. В момент времени
rk а) V -t kT
напряжение
Ucb(rk) Ux(rk) ylm(lx t ),
поскольку Uv(ric) О,
а уровень сигнала Щ принимает нулевое значение, меняя свою полярность относительно нулевого потенциала шины 15с отрицательной на положительную.
Выходной сигнал блока 10с учетом его инвертирующего свойства представляет собой результат схемной реализации дифференцирования Uio - Kp(dU4/dt) (IR)/dt -(yKpRlms n(ftrt + 0,57r - р) оЖрЯ1т51п(й« + 0,5л:-р-л) wKpRlmX
xsln(ftrt р -0,5 л),
где Кр - масштабный коэффициент реализации операции дифференцирования.
Напряжение UIQ изменяет свою полярность с отрицательной на положительную в моменты времени
rk + 0.25T - ш V + 0,5 л) + К Т fcT1 Р + 0.25Т + КТ. Рабочее состояние любого из компараторов 16 и 20 определяется следующим образом. Если сигнал, поданный на его первый вход превышает по величине нулевой потенциал второго входа, соединенного с шиной 15, то на выходе компаратора уста- . навливается сигнал высокого уровня, соответствующий логической единице; в противном случае на выходе компаратора устанавливается сигнал низкого (нулевого) уровня. Одновибраторы 17,21 срабатывают по положительным лерепадам своих входных напряжений.
Высокий уровень выходного сигнала Uте компаратора 16 поддерживается в интервалах
rk t ru -и ш р + (К + 0,5)Т, а высокий уровень выходного сигнала компаратора 20 - в интервалах rk + 0.25T t rk+1 + 0.25Т. В моменты rk, воспринимая передний фронт сигнала Die, первый одновибратор 17 выдает короткие (сравнительно с длительностью Т) импульсы Ui7, управляющие выборкой сигналов Ug(rk) и Udb, которая осуществляется в блоке 11 соответственно первым и вторым 19 УВХ:
Ul8 U9(rk) , Ul9 Udb(rk) (WL6)m.
Передний фронт сигнала 1)20 второй одновибратор 21 воспринимает в моменты (г + 0.25Т), формируя короткие импульсы U21 управления выборкой сигналов Ug(rk + +0,25Т) и U4, осуществляемой в блоке 12 соответственно третьим 22 и четвертым 23 УВХ:
U22 U9(rk + 0,25T) lvlm,
U23 - Щгк + 0,25Т) Rim .
На выходе блоков 13 и 14 выделяются сигналы, по уровню пропорциональные соответственно координате якоря 1 на оси X и скорости его движения: п.о- v Uia ft)IX Im „ у
Ui3-KATJҐ- ши1т -кх-х ,
u-Kui K-vгде Кд - масштабный коэффициент реализа0 цяи операции аналогового деления;
Кх - коэффициент преобразования перемещений Кх (l/Le);
Ку - коэффициент преобразования скорости, KV (I/R)3.
5 Коэффициенты преобразования Кх, Kv не зависят от колебаний амплитуды Um (ей пропорциональна амплитуда тока 1) и частоты f (о)/2 л) выходного напряжения источника 8, поскольку величины lm и юв
0 отношениях (Ihe/Uig), (U22/U23) сокращаются.
Итак, сравнительно с устройством-про тотипом, заявляемый преобразователь имеет расширенные функциональные
5 возможности, поскольку он обеспечивает выдачу совокупной информации о значениях как координаты X, так и скорости V якоря.
Формула изобретения
0 Преобразователь перемещений, содержащий подвижный якорь, две рабочие обмотки и первый резистор, соединенные последовательно и образующие два смежных плеча мостовой измерительной схемы,
5 две компенсационные обмотки и второй резистор, соединенные последовательно и образующие два других смежных плеча мостовой измерительной схемы, источник переменного напряжения, включенный в
0 диагональ мостовой измерительной схемы, первый блок деления, первый блок дискретизации, выходы которого соединены с входами первого блока деления, а управляющий вход первого блока дискрети5 зации- подключен к точке соединения первого резистора и рабочей обмотки, отличающийся тем, что, с целью расширения функциональных возможностей за счет получения информации о скорости движения
0 якоря, оно снабжено блоком вычитания, блоком дифференцирования, вторым блоком деления и вторым блоком дискретизации, точки соединения рабочих и компенсационных обмоток соединены с со5 ответствующими входами блока вычитания, выход которого соединен с первыми информационными входами первого и второго блоков дискретизации, второй информационный вход первого блока дискретизации
подключен к точке соединения компенсационных обмоток, второй информационный вход второго блока дискретизации объединен с входом блока дифференцирования и
блока дифференцирования соединен с управляющим входом второго блока дискрети- зации, выходы которого соединены с входами второго блока деления, а выходы
подключен к общей точке соединения пер- 5 первого и второго блоков деления являются вого резистора и рабочей обмотки, выход выходами преобразователя.
блока дифференцирования соединен с управляющим входом второго блока дискрети- зации, выходы которого соединены с входами второго блока деления, а выходы


| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1988 |
|
SU1518661A1 |
| Устройство для измерения магнитной проницаемости проводящего образца | 1989 |
|
SU1636819A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1983 |
|
SU1146540A1 |
| Устройство для измерения деформации клети прокатного стана | 1990 |
|
SU1768946A1 |
| Устройство для измерения параметров газовых потоков | 1987 |
|
SU1437694A1 |
| Устройство для измерения влажности нефти и нефтепродуктов | 1982 |
|
SU1073677A1 |
Изобретение относится к измерительной технике и может быть испо льзовано при измерении перемещений объектов. Преобразователь перемещений содержит подвижный якорь, мостовую схему, образованную парой рабочих обмоток, последовательно соединенных с первым резистором и парой компенсационных обмоток, последовательно соединенных со вторым резистором, первый блок дискретизации, выходы которого связаны с первым блоком деления, причем к управляющему входу первого блока дискретизации подключен первый резистор. Новым в преобразователе является введение схем вычитания и дифференцирования, второго блока деления и второго блока дискретизации с соответствующими связями, Первый блок дискретизации формирует сигналы, пропорциональные значениям координат якоря на оси контролируемых перемещений и балансной индуктивности рабочей обмотки, второй блок дискретизации формирует сигналы, по величине пропорциональные соответственно значениям скорости якоря и активному сопротивлению первого резистора. Выходные напряжения блоков деления пропорциональны парным отношениям уровней выделяемых ими сигналов. 1 ил.
| Устройство для измерения перемещений | 1981 |
|
SU994906A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
