Фиг. 2
Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений. .
Цель изобретения - повышение точности за счет снижения температурной погре-лности.
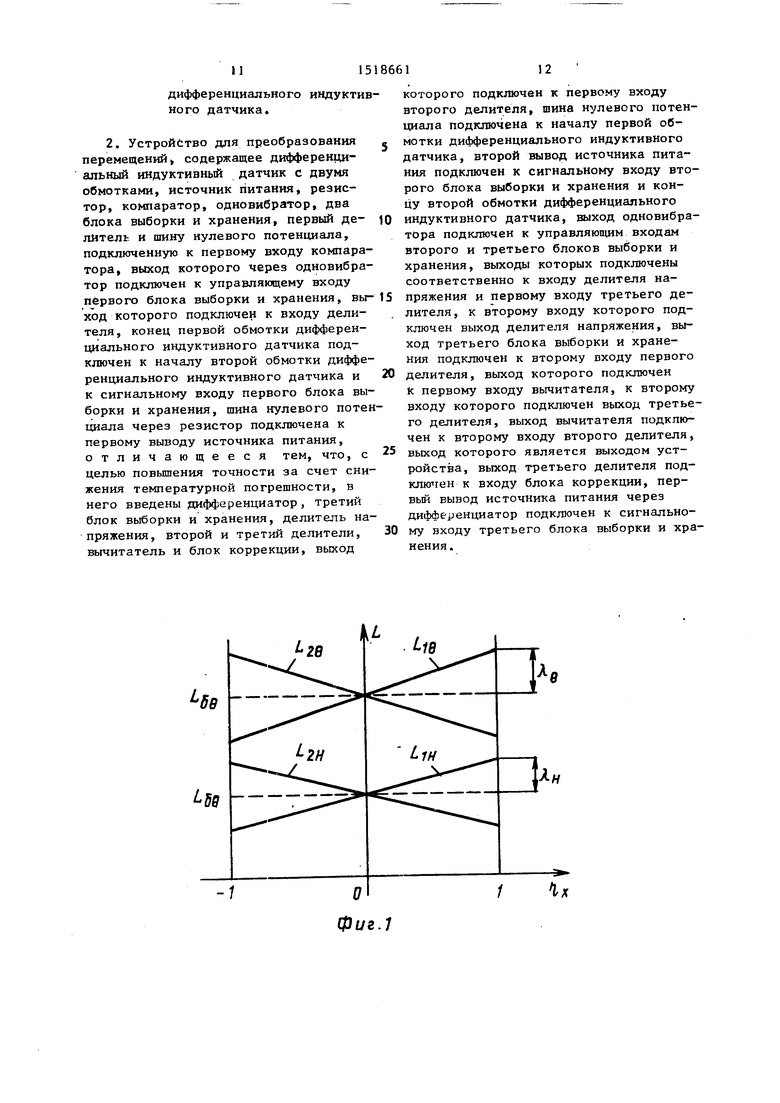
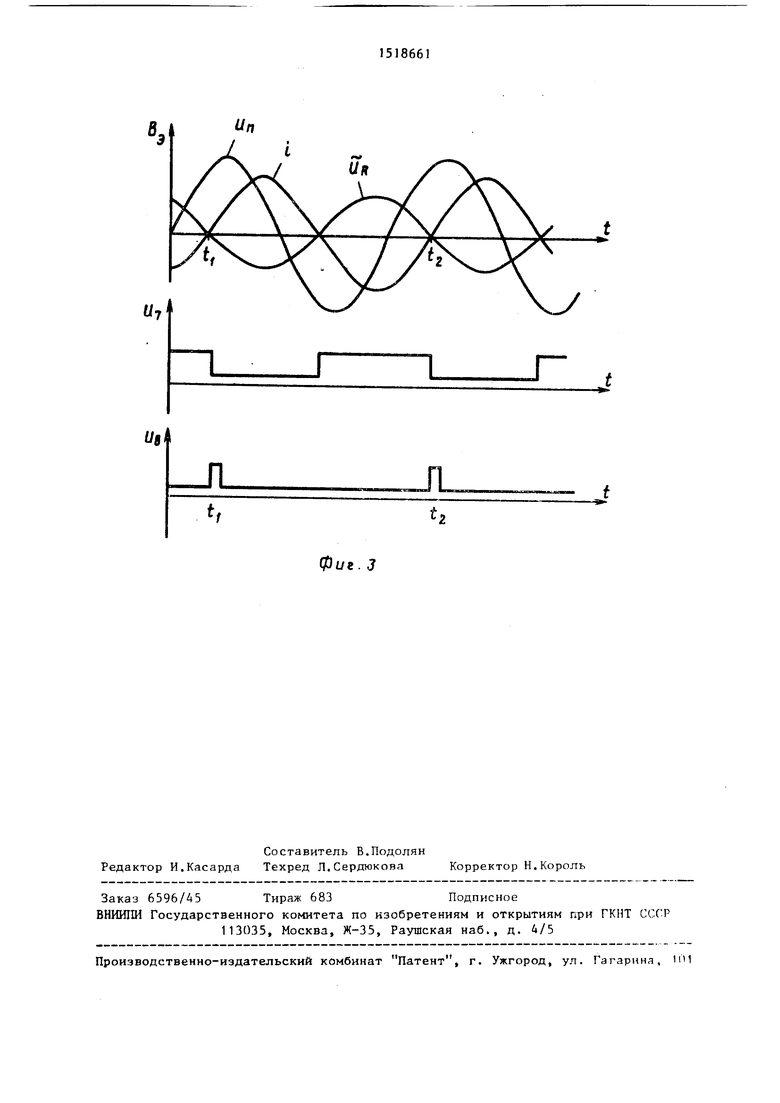
На фиг. 1 приведены графики зави- снмостей индуктивности рабочих об- моток от перемещений; на фиг. 2 - блок-схема устройства, осуществляющего способ; на фиг. 3 - временные ди- аграм1-1ы работы устройства.
Устройство, осуществляющее способ, содержит рабочие обмотки 1 и 2, а также ферромагнитный якорь 3 дифференциального индуктивного датчика, Источник 4 питания включен в электрический контур, образованный последо- нательным соединением рабочих обмоток И и 2, а также резистора 5. Выводы резистора 5, один из которых соединен с входом дифференциатора 6, а другой - с одним из выводов рабочей обмотки 1, подключены, соответственно, к первому и второму входам компаратора 7, связанного через однозибра- тор 8 с управляющн -1и входами блоков
9и 10 выборки и хранения,
Сигнальный вход блока 9 соединен с общей точкой рабочих обмоток 1 и 2, а его выход - с входом делимого делителя 11. Сигнальный вход блока
10подключен к выводу последователь- но соединенных рабочих обмоток 1 и 2
а его выход через делитель 12 напряжения - к входу делимого делителя 13 Выход блока 6 подключен к сигнальному входу блока 14 выборки и храненгш. Выход делителя 11 соединен с первым, а выход делителя 13 - с вторым входами вычитателя 15, выход которого подключен к входу делимого делителя 1 6 .
Выход делителя 13 через блок 17 коррекции связан с входом делителя 1 напряжение на выходе которого представляет собой выходной сигнал устройства, Инна 18 нулевого потенциала подключена к второму входу компаратора 7 и одному из выводов источника 4 питания.
Способ заключается в следующем. Рабочие обмотки 1 и 2 дифференци- ального индуктивного датчика, функционирующего в условиях колебаний температуры, а также резистор 5 запи тывают общим переменным напряжением
sinwt,
где V - амплитуда питающего напряжения;
(J - его круговая частота; t - время.
Выражения дифференциальных изменений индуктивностей,соответственно, рабочих обмоток 1 и 2 в зависимости от перемещений якоря 3 датчика вдоль оси X имеет вид-линейных функций
(), ,L5-l(X,+vt).
(-х) х х;.
(О (2)
где Ь - балансная ушдуктивность рабочей обмотки при нейтральном - балансном положении якоря 3, когда его координата X имеет нулевое значение; 1 коэффициент пропорцисчальнос ти индуктивности рабочей обмотки и координаты якоря 3, определяемый параметрами датчика и эксплуатационными условиями;
г, начальное положение якоря, из которого начинается его движение;
V - скорость движения якоря; (tX) - границы диапазона преобразования с линейной аппроксимацией зависимостей ин- дуктивностей рабочих обмот.ок и 2 от перемещений якоря 3 Запись формул (1) и (2) с введением одинаковой размерности величины коэффициента пропорциональности, стоящего перед аргументом X, и величины балансной индуктивности имеет вид
L,lX(X/X), (la) Ц -lX,(X/X,)+Lg -,+Ц, (2а)
где - модифицированный коэффициент пропорциональности имеющий размерность индуктивности;
lj(X/Xr) - относительное перемещение якоря;
-1 i .
В диапазоне преобразования суммарная индуктивность и величина тока рабочих обмоток 1 и 2 не зависят от координаты X
L,+L,2L,,(3) ,
(uJt-t/), (.f arctg Q, (4)
515186616
lM°V(2u)L5) + (2r+R) (5)где К - масштабный коэффициент опера ции дифференцирования,
где R-const - активное сопротивление
резистора 5;U(dUR/dt)R(di/dt).
г - активное сопротивление 5 Вьщеленные сигналы - напряжение
каждой рабочей обмоткирабочей обмотки U,, общее напряжение
п о I If) j.n рабочих обмоток )Lg/(г+к) - добротность контура,
нагружающего источник U(t)U,.(t)- -U(t).
Л ТТИТЭНИЯ
а также напряжение Uq - дискретизиВ рабочих обмотках 1 и 2 вьщеляют моменты времен напряжения, соответственно, U,(t),
UjCt), которые, согласно закону элек- (k-l) ,
тромагнитной индукции и с учетом па- ,5где k - целые числа, устанавливающие дения напряжения на активном сопротив- условную нумерацию периодов лении обмоток 1 и 2 равныпитающего напряжения и„.
(f) --i. + fT ) ff, Как следует из выражения для U,, ,
1 dt dt эти составляющие сигналов U, U
20в моменты t равны нулю, поскольку
U2(t) 5t dt (7) sin(ujt, .
где ц, y,j - потоКосцепления, соответ- Таким образом, в моменты t формиственно, рабочих обмотокруются дискретизированные величины
1 и 2.25иj напряжения первой рабочей обмотки, Ujj половины общего напряжения
Преобразуя выражения (6) и (7) срабочих обмоток и Uj напряжения
учетом (1), (2), (1а), (2а), (4) иих аналитические выржсения находятся
раскрывая производные произведенийна основании использования формул
(L,i), (Lji), получают30(8)-(14)
и /t)U,,+Uv,, и,(1), (8)U, U ,(t , (t . I jA.+Lf ), (15)
где Uj(,U,7- координатные составля-U j5 0,5U.5(t)C,,(, (t) (t)
ющие сигналов U i, U-,,)1„Ьб,(16)
пропорциональные ьеличи- 35 „и (,.(17)
не перемещений якоря 3 }
Затем выделяют напряжения U,,
п , f .Ujj-, пропорциональные по уровню отU,,-4L,-u)I(,+L)sin(a)t+0,5;r-c/),(9)ношениям соответственно дискретизии :2 1 )I(-A +L)sin(cJt+0,5i( -4 ), 40Рованного напряжения первой рабочей
(0)обмотки и половины дискретизирован, I .ного общего напряжения рабочих обмоt на дискретизированнос напряжение
Uy,,Uy.j- скоростные составляющие (для их количественного описания
сигналов и,, и, пропор- 45используют выражения (15)-(17)
циональные величине ско-и,,/и. К j/(K,R) (,,+1.6)
рости якоря Kj(;,-i-L5). (18)
Uv, i(L;+r) I(l,/r)sin(u)t-i/), (11)U KiUj5/Uj K L /(K,R), (19)
Uy, i(L ,+ r)Ini()sin(u. t-t/), (12) 50где Kj,const - масштабньп коэффици( . , , ,ент операции деления;
L , (dL,/dt), L , (dL,/dt).(K,R)
На резисторе 5 вьщеляют сигнал const - известная посто. .янная величин.,
(u. t-cf), (13) Сокращение в привсденньк отн зшекоторый затем дифференцируют, получая величины I ., -Осспечинапряжениевает независимость резульглтл п- -пънейшего преобразования величин 1 ,.,
(,m Р- sin(u)t+0,5fr-4), (14) температурных измеигнии ; к пшнo o сопротивления г рабочих обмоток 1 и 2, поскольку согласно выражению (5) эти изменения влияют именно на величину амплитуды I .
При нормальной температуре датчика величины модифицированнотхз коэффициента пропорциональности А , балансной индуктивности а также индуктивностей L , L , рабочих обмоток 1 и 2 имеют номинальные значения соответственно, А„, Lg ,
L.
1н
, ,+Ър„
Отклонения б температуры среды установки датчика от своего нормального значения, обычно принимаемого равным 20°С, обуславливают изменения данных величин (фиг. 1, где через L обозначена совокупность индуктивностей L , L j)
Л()/Ац, ()tL5, L,
,e-L,(i,,ejtO)5tL ,, 0 tO)L
L.,(T
ге
1Н (I )
)
Таким образом, величины индуктивностей рабочих обмоток 1 и 2 представляются в виде совокупностей (фиг,1)
-I
L
1 IL
,н (х),
L,o(lO,
если если
е 0,
0 0,
ме
1н (п-х), если е 0, 2e(ix) .
Зависимость модифицированного ко- Ьффициента пропорциональности А от уровня балансной индуктивности Lg, которая сама представляет собой функцию отклонения 6 температуры датчика от своего нормального значения, но- сит систематический характер. Эта зависимость известна по результатам опытных данньк, получаемых при температурных испытаниях дифференциальных индуктивных датчиков, либо по результатам расчетных данных, получаемых в процессе проектирования датчиков, и может быть аппроксимирована полиномом.
После выделения напряжения U его уровень функционально преобразуформируя нают в соответствии с пряжение
,A,
где К const - масштабный коэффициент функционального преобразования,
Одновременно с получением напряжения Ug выделяют разность напряжений di d2 согласно выражениям (18), (19) дает
Ua- UdrUds:-Kcj axЗатем формируют выходной электрический сигнал и а, уровень которого определяется отношением разностного напряжения к напряжению, сформированному с учетом
5
0
5
0 5
.
X
х
к
к
0 i
0
5
Ui Kd, KjKd
Ue К,А К, „
где (KjXr)const -коэффициент преобразования перемещений .
Таким образом, сформированное выходное напряжение является пропорциональным координате якоря 3, отсчитываемой вдоль оси контролируемых перемещений .
Устройство работает следующим образом.
Дифференциальньш индуктивный датчик с обмотками 1 и 2 установлен возле контролируемого подвижного объекта (на фиг. 2 не показан), с которым жестко скреплен якорь 3, и функционирует в условиях колебаний температуры окружающей его среды. Остальные узлы устройства находятся в стабильном тепловом режиме.
При перемещениях якорч вдоль оси X индуктивности рабочих обмоток 1 и 2 изменяются дифференциально, причем в пределах диапазона преобразования их зависимости от координат якоря 3, отсчитываемых по оси X, имеют линейный характер.
Источник 4 вырабатывает переменное напряжение, распределяющееся между последовательно соединенными рабочими обмотками 1 и 2 и резистором 5.
В момент времени t ()t, LJ- Ч напряжение резистора 5, отсчитываемое относительно щины 18 устройства
,, ,
достигает нулевого уровня и затем в течение половины периода Т(21Г/ы) питающего напряжения U р находится в области отрицательных значений (фиг.З, где через В, обозначена совокупность электрических величин, относящихся к контуру подключения источника : напряжений Up, IJ R и тока i).
91
ЁыхЬдное состояние компаратора 7 определяется соотношением уровней сигналов, подаваемых на его входы. Если величина сигнала, поступающего на первый вход, превышает нулевое значение, соответстнующее подключению его второго входа к общей шине устройства, то на выходе компаратора 7 устанавливается напряжение высокого (единичного) уровня. Если величина сигнала, поступающего на первый вход компаратора 7, переходит в область отрицательных значений, то уровень выходного напряжения компаратора 7 меняется с высокого на низкий (нулевой). Поэтому, начиная с момента t и в течение полупериода 0,5т с выхода компаратора 7 снимается напряжение низкого уровня.
Дифференциатор 6 реализует дифференцирование напряжения Up с одно- вр еменным изменением его знака
и -K,,U;,U5,
где Up(dUR/dt).
Одновибратор 8 запускается по отрицательному перепаду входного сигнала и в момент t начинает формирование короткого по сравнению с длительностью Т импульса Ug, по выдаче которого блоками 9, 10 и 14 производится дискретизация, соответственно, напряжения Ugf,Ui(t) рабочей обмотк 1., общего напряжения рабочих обмоток 1 и 2
Uch V «K U o(t) а также выходного напряжения L (, дифференциатора 6. Выходные напряжения блоков 9, 10 и 14 выборки и хранения соответственно, равны
,cOlJ,+LE), и,„ U(t,), U,,,u),
причем на выходе делителя 12 напряжения формируется половина общего напряжения рабочих обмоток 1 и 2
U,,5U(t,).
Делители 11 и 13 реализуют аналоговые операции деления выходных напряжений, соответственно, блока и делителя 12 на выходное напряжение блока . Выходные напряжения U делителя 11 и и делителя 13 представляют собой величины
110
U,,Ug/U,,U,Kj(,+L), и,,и,, /U,,.
Напряжение на выходе вычитателя 15 равно
и,5 U,,-U,.
Блок 17 коррекции реализует нз- вестную по спытно-испытательным или проектно-расчетным данным зависимость модифицированного коэффициента пропорциональности от напряжения U,,,, значения которого фиксиру- ются (определяются) при колебаниях температуры среды установки дифференциального индуктивного датчика.
Выходное напряжение II схемы 16, являющееся также и выходным сигналом устройства в целом, определяется отношением выходного напряжения вычитателя 15 к выходному напряжению блока 17 коррекции
П V -- -V -- -К , -- -К, - -К,
и пропорционально величине X контролируемой координаты якоря 3,,
Ф о Р м У -п а и :5 г б р е т е н и я
1. Способ преобразования перемещений, заключаюши1 ся в том, что пропускают перемепньш ток через обмотки дифференциального индуктивного датчика и формируют постоянное напряжение и, равное напряжен1-гю на первой обмотке в момент равенства нулю переменного тока через нее, отличающийся тем, что, с целью повышения точности за счет снижения температурной погрешности, в момент равенства нулю переменного тока через обмотки датчика форьшруют напряжение Ujj, равное сумме напряженго на обмотках датчика и напряжение ,j, пропорциональное скорости изменения переменного тока через обуяттки дл.тчика, а о перемещении X судят но значению выражения
5
УЫ, Х . 2Udo
21S
Л(.)
где ,(б) - температу7-)ноз пнгс1 т. коэффициент пропорим ичлыюс- ти, определяемьз iii r- ivjib- татам опытны:: ис I--T- HII
дифференциального индуктивного датчика.
2. Устройство для преобразования перемещений, содержащее дифференци альный индуктивный датчик с двумя обмотками, источник питания, резистор, компаратор, одновибратор, два блока выборки и хранения, первый делитель и шину нулевого потенциала, подключенную к первому входу компаратора, выход которого через одновибратор подключен к управляющему входу первого блока выборки и хранения, выход которого подключен к входу делителя, конец первой обмотки дифференциального индуктивного датчика подключен к началу второй обмотки дифференциального индуктивного датчика и к сигнальному входу первого блока выборки и хранения, шина нулевого потенциала через резистор подключена к первому выводу источника питания, отличающееся тем, что, с целью повьппения точности за счет снижения температурной погрешности, в него введены дифференциатор, третий блок выборки и хранения, делитель напряжения, второй и третий делители, вычитатель и блок коррекции, вькод
которого подключен к первому входу второго делителя, шина нулевого потенциала подключена к началу первой обмотки дифференциального индуктивного датчика, второй вывод источника питания подключен к сигнальному входу второго блока выборки и хранения и концу второй обмотки дифференциального индуктивного датчика, выход одновибра- тора подключен к управляющим входам второго и третьего блоков выборки и хранения, выходы которых подключены соответственно к входу делителя напряжения и первому входу третьего делителя, к второму входу которого подключен выход делителя напряжения, выход третьего блока выборки и хранения подключен к второму входу первого делителя, выход которого подключен К первому входу вычитателя, к второму входу которого подключен выход третьего делителя, выход вычитателя подключен к второму входу второго делителя, выход которого является выходом устройства, выход третьего делителя подключен к входу блока коррекции, пер- вьй вывод источника питания через дифференциатор подключен к сигнальному входу третьего блока выборки и хранения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Преобразователь перемещений | 1990 |
|
SU1768935A1 |
| Преобразователь угловых перемещений | 1987 |
|
SU1543223A1 |
| Устройство измерения перемещений | 1990 |
|
SU1779906A1 |
| Дифференциальный преобразователь линейных перемещений | 1985 |
|
SU1254286A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Устройство для контроля коэффициента неоднородности частиц ферромагнитных порошков | 1984 |
|
SU1241169A1 |
Изобретение относится к измерительной технике и может быть использовано для измерений линейных перемещений. С целью повышения точности за счет уменьшения температурной погрешности способ предусматривает формирование в моменты равенства нулю тока обмоток из переменного напряжения дифференциального индуктивного датчика двух напряжений, одно из которых равно напряжению первой обмотки дифференциального индуктивного датчика, а другое - полусумме напряжений первой и второй обмоток. В эти же моменты формируют напряжение, пропорциональное скорости изменения тока в обмотках датчика. Преобразуя полученные напряжения с учетом температурного дрейфа индуктивности датчика, формируют напряжение, пропорциональное перемещению и независящее от изменений температуры. В устройство, реализующее способ и содержащее обмотки 1, 2, якорь 3, источник 4 питания, резистор 5, компаратор 7, одновибратор 8, блоки 9, 10 выборки и хранения, делитель 11, шину 18 нулевого потенциала, введены дифференциатор 6, делитель 12 напряжения, делитель 13, блок 14 выборки и хранения, вычитатель 15, делитель 16, блок 17 коррекции. 2 с.п. ф-лы, 3 ил.
/ 1л
фиг. 3
| Способ преобразования перемещений и устройство для его осуществления | 1983 |
|
SU1146540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
