Предлагаемое изобретение относится к системам автоматического управления морской сейсмической съемкой и предназначено для вождения судна по линии геофизического профиля с заданными координатами при производстве геолого-геофизических исследований, преимущественно сейсморазведки, а также может быть использовано для обеспечения вывода судна на определенную точку при проведении инженерных работ.
При проведении геолого-геофизических исследований стоит задача обеспечения как можно более точного прохождения судном заданной линии геофизического профиля (проекта профиля).
Известна навигационная система, именуемая SUSY 30/11 (INTEGRATED NAVIGATION SYSTEM ATLAS SUSY 30/11 AN 1057 A 005, MAITENANCE AND REPAIR UNSTRUCTIONS, KRUPP ATLAS ELEKTRONIK, GERMANY, 1987), содержащая специализированный программируемый компьютер (процессор EPR 1100) с интерфейсами, главной функцией которого является управление геофизической съемкой и навигацией, соединенный с другим специализированным программируемым компьютером (процессором EPR 1300), снабженным интерфейсными платами для подключения датчиков (спутниковая система определения местоположения судна системы "ТРАНЗИТ" ("MAGNAVOX"), эхолоты, доплерлаг, инклинометр, гирокомпас) и исполнительных устройств (автопилот, сейсмостанция, монитор рулевого).
Известна также навигационная система, именуемая GIN-3 (USER'S MANUAL, CGG, FRANCE), также содержащая специализированный программируемый компьютер (HEWLETT PACKARD 8940 B Multiprogrammer), основной функцией которого является сбор информации от соответствующих датчиков и передача управляющих сигналов сейсмостанции, соединенный с другим специализированным компьютером (HEWLETT PACKARD A 800), основной функцией которого является управление геофизической съемкой и вождение судна по профилям.
В качестве датчиков эта система содержит спутниковые приемники системы "DGPS", "HYPERFLIX" или MULTI-REF, индукционный лаг, гирокомпас, эхолоты. В качестве исполнительных устройств - сейсмостанцию и графический монитор рулевого.
Навигационная система осуществляется вождение судна по сейсмопрофилям с заданными координатами и генерирует команды сейсмостанции на излучение импульсов упругих волн (сейсмосигналов) по времени или в соответствии с пройденным расстоянием. При этом обе известные навигационные системы задают временной интервал, определяющий величину исследуемого отрезка сейсмопрофиля, который должно пройти судно от момента подачи одного сейсмосигнала до момента подачи другого, с помощью ЭВМ на основании данных, полученных ею (ЭВМ) во время прохождения судном предыдущего отрезка профиля.
Однако реальная скорость судна во время прохождения исследуемого отрезка профиля может быть иной, чем это было установлено в момент задачи (вычисления и записи) временного интервала для указанного отрезка профиля. Это приводит к тому, что реально судно проходит больший или меньший отрезок, чем это было нужно по заданному проекту профиля и тем самым в выполнение этого проекта вносятся существенные ошибки. Кроме того, "зависание" управляющего компьютера или случайный сбой в его работе приводят к прекращению формирования сигналов запуска сейсмостанции, что в свою очередь приводит к прекращению выполнения сейсмоисследований и сходу судна с профиля.
Другим недостатком известных навигационных систем является низкая производительность входящих в их состав компьютеров, которая приводит к неравномерности посылок на запуск сейсмосигналов (задержка может быть до 0,5 с), что также вносит ошибки в выполнение проекта профиля.
Кроме того, несмотря на наличие в известных навигационных системах датчиков спутниковой системы определения местоположения судна, интервал подачи сейсмосигналов с помощью этих систем определяется только исходя из данных доплерлага, что приводит к росту невязок-ошибок прохождения профиля, связанных с ошибкой определения местоположения судна.
Основная техническая задача, на решение которой направлено предлагаемое изобретение, состоит в обеспечении возможности корректировать интервал времени между подачей последовательных сейсмосигналов непосредственно во время прохождения исследуемого отрезка профиля, а также продолжать работу при перезапуске управляющего компьютера в случае его зависания или сбоя.
Другая задача состоит в повышении быстродействия навигационной системы и обеспечении возможности подключать к ней датчики, имеющие и не имеющие последовательный интерфейс.
Еще одна задача состоит в повышении точности определения местоположения судна при качке.
Основная техническая задача решается тем, что предложена навигационная система для проведения морской сейсмической съемки, включающая компьютер, приемники спутниковых систем определения координат объекта, выполненные с возможностью установления на борту судна, лаг, гирокомпас, выходы которых соединены с входом компьютера, сейсмостанцию с пневмоисточниками и концевым буем сейсмокосы и эхолоты, выходы и входы которых соединены соответственно с входом и выходом этого компьютера, графический монитор рулевого, вход которого соединен с выходом компьютера, при этом первый вход и выходы сейсмостанции соединены с компьютером, которая, согласно предположенному техническому решению, снабжена таймером для регистрации и корректировки интервала времени между подачей последовательных сейсмосигналов непосредственно во время прохождения исследуемого отрезка профиля, вход которого соединен с выходом компьютера, выход - с приемником спутниковой системы определения координат объекта и вторым входом сейсмостанции.
Другая задача решается тем, что в качестве компьютера установлен персональный компьютер, снабженный по меньшей мере двумя дополнительными интерфейсными платами для подключения датчиков, не имеющих последовательного интерфейса, цифровой платой, для подключения датчиков, имеющих последовательный интерфейс, и платой управления, при этом вход графического монитора рулевого, второй вход и два выхода сейсмостанции соединены с выходами цифровой платы, третий выход сейсмостанции и вход одного эхолота соединены с выходом платы управления.
Еще одна задача решается тем, что навигационная система снабжена инклинометром, выход которого соединен со входом компьютера.
Для расширения возможностей навигационной системы она дополнительно снабжена доплерлагом, выход которого соединен со входом компьютера, что позволяет работать с двумя видами счисления - счисления пути по индукционному лагу и гирокомпасу и счисления пути по доплерлагу и гирокомпасу.
Для автоматического управления судном на профиле система дополнительно снабжена авторулевым, вход которого соединен с выходом компьютера для сбора информации.
Для определения точных координат положения пневмоисточников и конца сейсмокосы, являющихся составными частями сейсмостанции, навигационная система дополнительно снабжена приемниками спутниковой системы определения координат объекта, установленными по одному на линиях пневмоисточников, и концевом буе сейсмокосы.
Таймер, регистрирующий и корректирующий интервал времени между подачей последовательных сейсмосигналов непосредственно во время прохождения исследуемого отрезка профиля, выполнен из трех элементов, один из которых является регистром и предназначен для регистрации времени, необходимого для прохождения исследуемого отрезка профиля, в каждый момент времени прохождения этого отрезка, другой - часы, предназначенные для регистрации реального времени от момента подачи предыдущего сейсмосигнала, третий - элемент сравнения данных, имеющий входы A и B, и снабжен двумя одновибраторами, при этом вход регистра соединен с компьютером, выход - с входом A элемента сравнения, выход часов соединен с входом B элемента сравнения, один вход часов соединен с компьютером, а другой - с выходом элемента сравнения, выход которого в свою очередь соединен с входами обоих одновибраторов, выход одного из которых соединен с сейсмостанцией, а выход другого - с приемником спутниковой системы определения местоположения объекта.
В качестве цифровой платы может быть установлена плата, имеющая по меньшей мере 8 каналов связи.
Предлагаемая навигационная система может быть снабжена дополнительным компьютером, соединенным с основным компьютером, и подключенными к нему печатающими устройствами, графопостроителями и цифровыми столами.
Таким образом, наличие вышеописанного таймера позволяет, с одной стороны, обеспечить постоянную корректировку времени прохождения исследуемого отрезка (линейного интервала) профиля между двумя последовательными сейсмосигналами, что повышает точность выполнения данного линейного интервала; с другой стороны наличие связи таймера с приемником спутниковой системы определения местоположения объекта, установленным на борту судна, позволяет регистрировать момент запуска сейсмостанции для подачи сейсмосигналов с точностью до 0,000001 сек. по шкале всемирного времени, что в свою очередь позволяет определить точные координаты пневмоисточников и конца сейсмокосы и также повысить точность выполнения проекта профиля. Кроме того, наличие таймера, как отдельного элемента системы, позволяет продолжить работу на профиле при "зависании" или сбое компьютера, поскольку он позволяет сохранять последнюю корректировку времени прохождения исследуемого интервала профиля и осуществлять следующие запуски сейсмостанции через интервалы времени, соответствующие этой корректировке. Если остановка компьютера продолжалась не более 1-2 мин, то возможно продолжение работы на профиле после перезапуска компьютера.
Применение в качестве компьютера для сбора информации и управления геофизической съемкой персонального компьютера, снабженного по меньшей мере двумя интерфейсными платами для подключения датчиков, не имеющих последовательного интерфейса, цифровой платой, имеющей по меньшей мере 8 каналов, для подключения датчиков, имеющих последовательный интерфейс и платой управления, позволяет повысить надежность работы навигационной системы за счет того, что функция двух компьютеров (компьютера для сбора информации и компьютера для управления геофизической съемкой) выполняет один персональный компьютер, который, по сравнению со специлизированными компьютерами, предоставляет возможность оператору работать не только с навигационными программами, что важно как для подготовки и изменения проекта работ, так и для обработки полученных материалов.
Наличие в компьютере дополнительных по меньшей мере двух интерфейсных плат для подключения датчиков, не имеющих последовательного интерфейса и цифровой платы, имеющей по меньшей мере 8 каналов, для подключения датчиков, имеющих последовательный интерфейс, позволяет расширить возможности подключения большего количества разнообразных датчиков, в том числе и отечественного производства, а также позволяет передавать навигационные данные на несколько внешних компьютеров для решения других навигационных задач. Персональный компьютер позволяет также установить цифровую плату с большим количеством каналов связи, что обеспечивает возможность подключения дополнительного гирокомпаса, гравиметра и других датчиков.
Наличие в предлагаемой навигационной системе инклинометра позволяет точнее определять местоположение судна при качке, опираясь при этом не на положение антенн спутниковых приемников (приемников спутниковой системы определения местоположения объекта), а на положение центра масс судна, что повышает точность определения координат судна при выполнении профиля. Наличие авторулевого в предлагаемой навигационной системе позволяет обеспечить не только автоматическое управление судном на профиле, но и при заходах на него.
Наличие в предлагаемой системе дополнительного компьютера с подключенными к нему печатающими устройствами, графопостроителями и цифровыми столами позволяет осуществлять контроль качества выполняемых работ с одновременным выводом информации на печать.
Сущность предлагаемого изобретения поясняется графическими материалами, где на фиг. 1 представлена блок-схема навигационной системы, на фиг. 2 - функциональная схема таймера.
Предлагаемая навигационная система содержит (фиг. 1) основной компьютер 1, снабженный платой управления 2, интерфейсными платами 3 и 4, цифровой платой 5, а также сейсмостанцию 6, состоящую из собственно сейсмостанции, сейсмокосы, и пневмоисточников (сейсмокоса и пневмоисточники на схеме не обозначены), основной приемник 7 спутниковой системы определения координат объекта (далее спутниковый приемник), вспомогательный спутниковый приемник (или система MULTI-REF) 8, приемные антенны которых установлены на антеннах судна, спутниковые приемники 9, установленные по одному на линиях пневмоисточников (на схеме не обозначенных) и на концевом буе сейсмокосы (буй и сейсмокоса на схеме не обозначены), эхолоты 10 и 11, индукционный лаг 12, гирокомпас 13, инклинометр 14, компьютер 15 системы контроля качества, принтер 16, плоттер 17, цифровой стол 18, графический монитор 19 рулевого, таймер 20, установленный на плате 2 управления, авторулевой 21, доплерлаги 22 и 23.
Сейсмостанция 6 имеет два входа, один из которых соединен с цифровой платой 5, а второй с таймером 20, принадлежащими (соединенными) основному компьютеру, и три выхода, два из которых соединены с цифровой платой 5, а третий - с платой 2 управления. Спутниковые приемники 7, 8, установленные на борту судна, имеют выходы, соединенные с цифровой платой 5, а приемник 7 имеет также вход, соединенный с таймером 20. Спутниковые приемники 9 имеют выходы, соединенные с цифровой платой 5. Эхолот 10 имеет выход и вход, соединенные с цифровой платой 5, эхолот 11 (по меньшей мере один) имеет выход, соединенный с интерфейсной платой 3, и вход, соединенный с платой управления 2. Индукционный лаг 12 имеет выход, соединенный с интерфейсной платой 3. Гирокомпас 13 и инклинометр 14 имеют выходы, соединенные с интерфейсной платой 4. Компьютер 15 системы контроля качества имеет входы, подсоединенные к цифровой плате 5 основного компьютера 1, выходу цифрового стола 18, и выходы, соединенные с принтером 16 и плоттером 17. Графический монитор 19 рулевого имеет вход, подсоединенный к цифровой плате 5. Авторулевой 21 имеет вход, соединенный с платой управления 2. Доплерлаг 23 имеет выход, соединенный с интерфейсной платой 3, а доплерлаг 22 имеет выход, соединенный с цифровой платой 5.
В качестве основного компьютера 1 установлен персональный компьютер "Pentium" (могут быть установлены любые компьютеры, выполненные с возможностью дополнительного установления в него по меньшей мере 4-х интерфейсных плат); в качестве компьютера 15 системы контроля качества также установлен компьютер "Pentium" (или любой другой, который можно использовать в качестве основного); в качестве интерфейсных плат 3, 4 установлены оригинальные платы, разработанные и выполненные из известных блоков (например, дешифратора адреса, шинного формирователя, регистра состояния) с учетом необходимости подключения конкретных известных датчиков (доплерлаг "DOLOG 12D", эхолоты "DESO 20", "НЭЛ-3М", "ПЭЛ-4", гирокомпасы "SPERRY 37". "ANSHUTZ Standart 4", "ВЕГА", индукционный лаг "ИЭЛ-2М", инклинометр любой марки); в качестве платы 2 управления установлена оригинальная плата, разработанная и выполненная из известных блоков (например, дешифратора адреса, шинного формирователя, регистра состояния) с учетом подключения авторулевого 21 (например, "DECCA"), таймера 20, эхолота 11, спутникового приемника 7 и сейсмостанции 6. В качестве спутниковых приемников 7, 8 могут быть установлены приемники DGPS (или система MULTI-REF в качестве приемника 8), в качестве приемника 9 - GPS. В качестве цифровой платы 5 установлена плата "DigiBoard PC/8e", которая имеет 8 портов RS-232 ввода-вывода информации (может быть также установлена плата "DigiBoard PC/16e" или несколько плат "DigiBoard PC/8e").
Таймер 20 содержит (фиг. 2) регистр 24, часы 25 и элемент 26 сравнения и снабжен одновибраторами 27, 28. При этом выход Q регистра 24 соединен со входом A элемента 26 сравнения, выход Q1 часов 25 соединен со входом B элемента 26 сравнения. Выход элемента 26 сравнения соединен со входом R часов 25, а также со входами одновибраторов 27, 28. Вход D регистра 24 соединен с платой 2 управления (шинным формирователем, не обозначенным на схеме), а вход CS регистра 24 также соединен с платой 2 управления (дешифратором адреса, не обозначенным на схеме). Вход C часов 25 соединен с платой 2 управления. Выход одновибратора 28 соединен со входом спутникового приемника 7, а выход одновибратора 27 - со входом сейсмостанции 6.
Работой предлагаемой навигационной системы управляют оригинальные программы, например, резидентная, с помощью которой осуществляют так называемую "фоновую" навигацию и которая работает постоянно, ряд программ, обеспечивающих заход судна на профиль и работу на профиле, а также другие программы.
Описанная система работает, например, в следующих режимах:
1. Фоновая навигация:
При работе навигационной системы в этом режиме основной компьютер 1 снимает информацию со следующих датчиков: спутниковых приемников 7 и 8, эхолотов 10 и 11, доплерлагов 22, 23, индукционного лага 12, гирокомпаса 13, инклинометра 14 и сейсмостанции 6 (о положении сейсмокосы) и выдает информацию о местоположении судна на графический монитор 19 рулевого.
2. Заход судна на профиль:
При работе навигационной системы в этом режиме основной компьютер 1 снимает информацию с тех же датчиков, что и при работе в фоновом режиме. При этом основной компьютер 1, на основании заложенной в него программы, дает на графический монитор 19 рулевого оператору информацию о вариантах захода судна на профиль (в виде графических картин) и положении сейсмокосы.
3. Работа судна на геофизическом профиле:
При прохождении судном геофизического профиля, по заранее заданному маршруту (проекту профиля) навигационная система осуществляет вождение судна по этому профилю с заданными координатами и генерирует команды сейсмостанции 6 на излучение импульсов упругих волн (сейсмосигналов) в начальной точке профиля и после прохождения судном каждого заранее заданного отрезка пути (исследуемого интервала), при этом эхолоты 10, 11 и все остальные датчики получают извне и передают информацию на компьютер 1. Для этого, после вывода судна на исходную точку профиля основной компьютер 1 подает сигнал на сейсмостанцию 6, которая осуществляет запуск пневмоисточников (на схеме не обозначенных), производящих первый (и последующие) сейсмосигнал (взрыв). Следующий сейсмосигнал подается после прохождения судном определенного в соответствии с заданием (проектом) линейного интервала (исследуемого отрезка пути). Для этого, на основании данных о скорости судна и реальной внешней обстановке (скорости ветра, течения, волнения и других помех, влияющих на движение судна), поступающих на компьютер 1 от соответствующих датчиков (тех же, что и при работе системы в фоновом режиме, и спутниковых приемников 9) в каждый момент времени, компьютер 1 также в каждый момент времени формирует величину временного интервала (код временного интервала - отрезок времени на данный момент, за который судно в данный момент может пройти заданный линейный интервал), по истечении которого должен быть произведен следующий сейсмосигнал (взрыв). Этот код поступает с платы 2 управления компьютера 1 на вход D регистра 24 таймера 20. Одновременно часы 25 производят отсчет текущего времени от предыдущего взрыва. Информация (в виде чисел) с регистра 24 поступает на вход A, а информация (также в виде чисел) с элемента 25 - на вход B элемента 26 сравнения. Элемент 26 сравнения производит сравнение чисел, поступающих на входы A и B и как только число, поступающее с элемента 25, становится больше числа, поступающего с регистра 24, элемент 26 вырабатывает сигнал, который через одновибратор 27 поступает на сейсмостанцию 6 для запуска сейсмодатчиков. Одновременно сигнал от элемента 26 поступает на вход R элемента 25 для "обнуления" и начала отсчета нового интервала времени и через одновибратор 28 на основной спутниковый приемник 7 для запроса информации о всемирном времени.
При работе навигационной системы в режиме работы на профиле на вход с элемента 25 поступает с платы 2 управления частота (кварцованная) генератора компьютера 1, а на вход CS регистра 24 - команда записи текущего кода линейного интервала. Сейсмостанция 6 направляет на управляющую плату 2 компьютера 1 сигнал, подтверждающий срабатывание пневмоисточников.
Таким образом, за счет работы нового, отсутствующего в известных навигационных системах блока - таймера 20 обеспечивается постоянная корректировка времени прохождения исследуемого отрезка (линейного интервала) профиля и соответственно временного интервала подачи очередного сейсмосигнала, что повышает точность выполнения данного линейного интервала и соответственно всего профиля; кроме того, обеспечивается регистрация момента запуска сейсмостанции 6 для подачи сейсмосигналов с точностью до 0,000001 сек. по шкале всемирного времени (точность определяется параметрами спутникового приемника 7, в конкретном случае DGPS), что в свою очередь позволяет определить точные координаты пневмоисточников и конца сейсмокосы и также повысить точность выполнения проекта профиля. Наличие таймера 20, как отдельного элемента системы, позволяет продолжить работу на профиле при "зависании" или сбое основного компьютера 1, поскольку он позволяет сохранять последнюю корректировку времени прохождения исследуемого интервала профиля, "привязанную" к шкале всемирного времени, и осуществить следующий (после "зависания" компьютера) запуск сейсмостанции через интервал времени, соответствующий этой корректировке. Если остановка компьютера 1 продолжалась не более 1-2 минут, то возможно продолжение работы на профиле после его перезапуска.
Применение в качестве компьютера 1 для сбора информации и управления геофизической съемкой персонального компьютера также позволяет повысить точность прохождения профиля за счет быстродействия компьютера, обеспечивающего прохождение управляющих сигналов с меньшей задержкой, чем в известных навигационных системах; повысить надежность работы навигационной системы за счет того, что функции двух компьютеров (компьютера для сбора информации и компьютера для управления геофизической съемкой) выполняет один персональный компьютер. Персональный компьютер по сравнению со специализированными компьютерами, предоставляет возможность оператору работать не только с навигационными программами, что важно как для подготовки и изменения проекта работ, так и для обработки полученных материалов.
Наличие в компьютере дополнительных по меньшей мере двух интерфейсных плат 3, 4 для подключения датчиков, не имеющих последовательного интерфейса и цифровой платы 5, имеющей по меньшей мере 8 каналов, для подключения датчиков, имеющих последовательный интерфейс, позволяет расширить возможности подключения большего количества разнообразных датчиков, в том числе и отечественного производства, а также позволяет передавать навигационные данные на несколько внешних компьютеров для решения других навигационных задач. Персональный компьютер 1 позволяет также установить цифровую плату 5 с большим количеством каналов связи, что обеспечивает возможность подключения дополнительного гирокомпаса, гравиметра и других датчиков.
Наличие в предлагаемой навигационной системе инклинометра 14 позволяет точнее определять местоположение судна при качке, опираясь при этом не на положение антенн спутниковых приемников 7, 8, а на положение центра масс судна, что повышает точность определения координат судна при выполнении профиля. Наличие авторулевого 21 в предлагаемой навигационной системе позволяет обеспечить не только автоматическое управление судном на профиле, но и при заходах на него.
Наличие в предлагаемой системе дополнительного компьютера 15 с подключенными к нему печатающим устройством 16, графопостроителем 17 и цифровым столом 18 позволяет осуществлять контроль качества выполняемых работ с одновременным выводом информации на печать.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления морскими сейсмическими исследованиями | 1986 |
|
SU1376052A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПУТНИКОВЫЙ РЕЧНОЙ КОМПАС | 2009 |
|
RU2411451C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2011 |
|
RU2463205C2 |

Навигационная система используется для автоматического управления морской сейсмической съемкой. Система содержит таймер, компьютер, с входом которого соединены приемники спутниковых систем определения координат объекта, лаг, гирокомпас, сейсмостанцию и эхолоты, выходы и входы которых соединены соответственно с входом и выходом компьютера, и графический монитор рулевого, вход которого соединен с выходом компьютера. Система может быть снабжена доплерлагом, авторулевым, системой контроля качества, принтером, плоттером, цифровым столом. Таймер предназначен для регистрации и коррекции интервала времени между подачей последовательных сейсмосигналов непосредственно во время прохождения исследуемого отрезка профиля. Повышены быстродействие и точность системы. 4 з.п.ф-лы, 2 ил.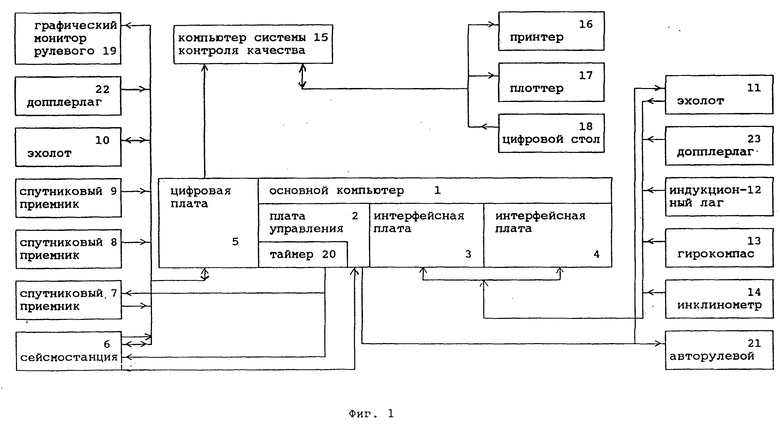
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Проспект Фирмы "KRUPP ATLAS ELEKTRONIK" | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Морское геофизическое вычислительное устройство | 1977 |
|
SU887932A1 |
| Устройство выдачи деталей | 1987 |
|
SU1458150A1 |

