Изобретение относится к области технических средств судовождения, предназначенных для определения угловой скорости поворота, положения носа и кормы судна относительно границ судового хода при плавании по заданной траектории движения или по счислению.
Известен гиротахометр [1], предназначенный для измерения угловой скорости поворота судов большого водоизмещения (более 100000 т), на которых он устанавливается в соответствии с рекомендациями Международной морской организации. Наибольшее распространение в судовождении получили гиротахометры, в которых используется астатический гироскоп с двумя степенями свободы.
Известен спутниковый компас [2], наиболее близкий по технической сущности с заявленным устройством, содержащий антенный блок из трех антенн, разнесенных друг относительно друга на 120° в круге с диаметром 1150 мм, дисплей и процессор. На вход процессора подаются сигналы от антенного блока, приемника дифференциальных поправок и данные курса, а с выхода процессора обсервованные координаты и курс подаются на технические средства судовождения: радиолокационную станцию (РЛС), авторулевой (АР), эхолот (Эх), электронную картографическую навигационно-информационную систему (ЭКНИС) и автоматическую идентификационную систему (АИС), а также через синхронизирующее устройство - в гирокомпас.
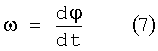
Наиболее сложно осуществлять судовождение по рекам, где особого внимания требуют к себе повороты (см. фиг.1). На изгибах речного русла струя наиболее сильного течения обычно смещается в сторону приглубого берега и совместно с центробежной силой пытается навалить судно на вогнутый берег (фиг.1, B). У мелководного «выпуклого» берега скорости течения невелики. При этом за «выпуклым» берегом могут возникнуть противотечения, стремящиеся развернуть судно поперек судового хода (фиг.1, С), что требует непрерывного контроля за расстоянием носа и кормы судна до кромок судового хода и «раската» кормы на повороте.
Поворот рекомендуется проходить на пониженной скорости и так, чтобы диаметральная плоскость судна все время оставалась параллельной струям течения, т.е. чтобы радиус циркуляции был возможно ближе к радиусу поворота речного русла (фиг.1, А) при соответствующей угловой скорости поворота.
Реализовать способ безопасного прохода крутых поворотов с сильным свальным течением позволяет рассматриваемая здесь технология с помощью спутникового речного компаса.
Антенны штатного и дифференциального режимов спутниковой навигационной системы (например, GPS), размещенные в носу и корме судна, позволяют определить угловую скорость перемещения носа и «раскат» его кормы под воздействием противоположных струй течения и выдавать сигнал на рулевое устройство для перекладки пера руля в нужном направлении.
В существующих образцах спутниковых компасов отсутствуют сервисные задачи по определению положения корпуса судна относительно оси и границ судового хода, угловой скорости его поворота, а также определения нового безопасного истинного курса судна после прохождения им излучины реки со свальным течением.
Таким образом, недостатками известного спутникового компаса является то, что не обеспечивается автоматизированное определение и учет:
- угловой скорости поворота судна на излучине при воздействии свального течения;
- положения носа и кормы судна при покладке судна на новый курс на излучине реки со свальным течением относительно оси судового хода и его кромок.
Кроме того, существует вероятность потери спутниковых сигналов при прохождении судна под мостом или затенении антенного блока.
Это вызывает необходимость при прохождении крутых излучин реки со свальными течениями управление судном осуществлять вручную и производить ручной ввод необходимых величин (угловой скорости поворота судна, суммарного угла сноса судна, нового безопасного истинного курса) в авторулевой, что в конечном счете снижает навигационную безопасность плавания, а также делает невозможным автоматизацию процесса судовождения.
Целью изобретения является расширение функциональных возможностей существующего спутникового компаса за счет автоматизированного определения и учета угловой скорости поворота судна, суммарного сноса, положения носа и кормы судна относительно оси и кромок судового хода, а также нового безопасного истинного курса судна, а также увеличения степени автоматизации процесса судовождения, исключения до минимума негативного влияния так называемого «человеческого фактора» в экстремальных условиях и повышения навигационной безопасности плавания судна в целом.
Эта цель достигается тем, что вместо антенного блока предлагается использовать разнесенные в нос и корму антенны приемников спутниковой навигационной системы, с добавлением к процессору специального блока, позволяющего производить вычисления угловой скорости поворота судна, расстояния носа и кормы судна от оси и кромок судового хода и выдавать эти данные через ЭКНИС на авторулевой для автоматизированного судовождения, благодаря чему спутниковый компас приобретает новые свойства, т.е. достигается новый положительный эффект.
Пример реализации заявляемого спутникового речного компаса. Приведем его для наиболее сложного случая - прохода крутого изгиба реки со свальным течением, где в соответствии с [3] точность определения места судна должна быть не более 1 м. Для реализации столь жесткого требования по точности нами предлагается использование дифференциального режима спутниковой навигационной системы GPS (DGPS).
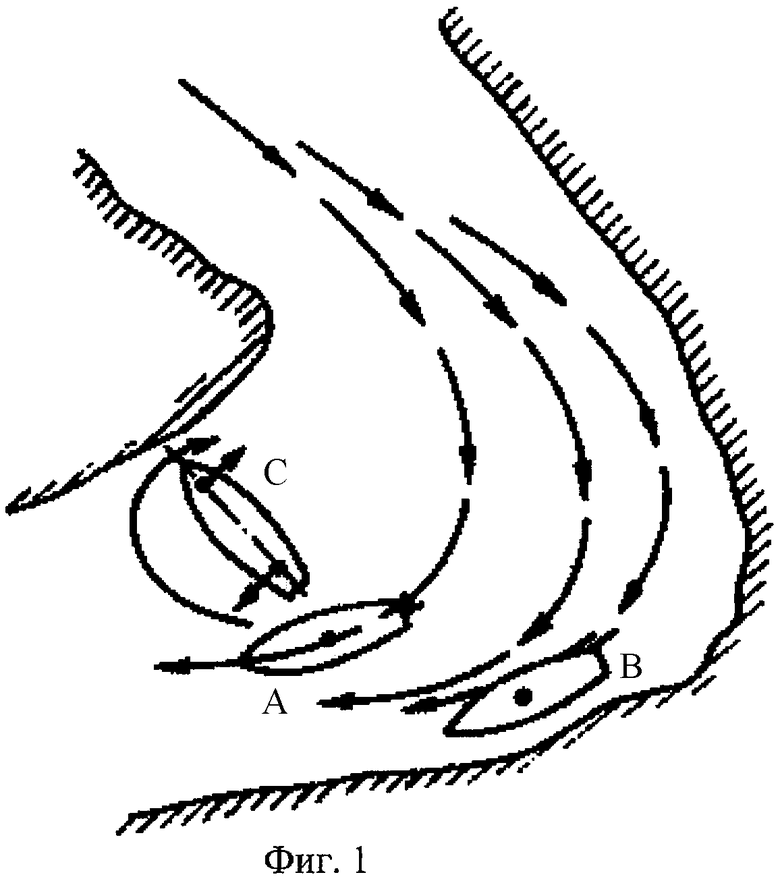
Принцип определения угловой скорости поворота судна и его истинного курса приведен на фиг.2 [4].
Прием спутниковых сигналов происходит на антенны A1 - 1 и A2 - 2, расстояние между которыми равно b.
Передача сигналов GPS (DGPS) производится на двух частотах: L1=1575,42 и L2=1227,60 МГц. В судовой навигационной аппаратуре потребителей (НАП) торгового флота используется только С/А - код на частоте L1 с длиной волны ≈19 см.
При обсервациях по счислимым координатам судна и по эфемеридам навигационных космических аппаратов (НКА) всегда могут быть рассчитаны горизонтные координаты спутников: высота hS и азимут AS. На фиг.2 эти координаты показаны для одного из НКА.
Расстояния, которые проходит сигнал с определенного НКА до антенн A1 - 1 и A2 - 2, отличаются на величину ΔD. Эту разность расстояний можно определить, измерив сдвиг фаз ΔФ несущего сигнала, принимаемого антеннами A1 - 1 и A2 - 2:

где n - целое число циклов;
Δψ - дробная часть цикла.
Фазовым измерениям присуща многозначность, поэтому измеряется только Δψ, а n должно быть определено по дополнительным данным.
По значению ΔФ величина ΔD находится по формуле

где λ - длина волны несущего сигнала.
Зная ΔD и высоту hS НКА над истинным горизонтом, можно найти его курсовой угол qS и истинный курс судна KCHC:



Значение курса определяется по всем НКА, находящимся в зоне радиовидимости, и усредняется.
Определив значение истинного курса KCHC, нам представляется возможным рассчитать значение угловой скорости поворота судна следующим образом. В момент начала поворота судна t1 производится замер курса судна KCHC-1, а через некоторый промежуток времени t2 - KCHC-2. Тогда угол φ, на который повернулось судно, может быть найден как разность между новым и старым курсами KCHC-2 и KCHC-1, т.е.

Тогда величина угловой скорости поворота судна находится из выражения [5]
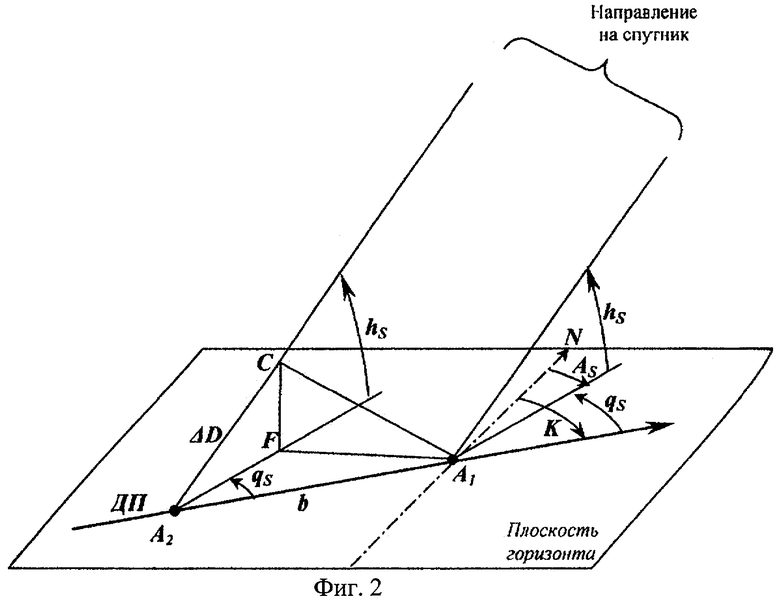
Помимо угловой скорости поворота судна на крутом изгибе реки со свальными течениями нас интересует с точки зрения навигационной безопасности плавания и местоположения его носа и кормы в любой момент времени относительно кромок судового хода. Чтобы определить эти величины, необходимо установить на судне спутниковый речной компас, состоящий из двух антенн DGPS 1 и 2, процессора - 5 и дисплея - 7, разнести эти антенны в нос и корму судна в его диаметральной плоскости и подключить их через многоканальный приемник спутниковых сигналов - 3 к входу блока определения курса, угловой скорости поворота, местоположения носа и кормы судна - 4, выход которого вместе выходом гирокомпаса - 12 подсоединены к входу процессора - 5, при этом выходы процессора - 5 подключены к АИС - 10, эхолоту - 11, радиолокационной станции (РЛС) - 8, ЭКНИС - 6, а через нее - к авторулевому - 9.
Вычисление фактических расстояний носа и кормы от границ (кромок) судового хода происходит в процессоре - 5 следующим образом. Ширина судового хода Шсх и его границы (координаты левой и правой кромок - Мкр), снятые с ЭКНИС - 6 и переданные в блок - 5 по обсервованным координатам Мн и Мк, подвергаются математическим расчетам по формулам, позволяющим в динамике рассчитывать величины отстояния носа и кормы соответственно от кромок судового хода и оценивать вероятность безопасного прохода судном данного участка реки:


где Lн, Lк - соответственно расстояния носа и кормы судна от кромок судового хода;
Мкр - местоположение (координаты) кромок судового хода, снятые с электронной карты;
Мн, Мк - мгновенные координаты носа и кормы судна, полученные путем обсервации по СНС на разнесенные антенны.
Кроме того, в процессоре - 5 производится осреднение курса, выработанного гирокомпасом и спутниковым речным компасом. Рассчитанные в процессоре - 5 параметры (ω, Kср, Мн, Мк, Lн, Lк) с выхода процессора - 5 подаются для отображения на дисплей - 7 и ЭКНИС - 6. Кроме того, величина Kср также подается на РЛС - 8. Схема спутникового речного компаса изображена на фиг.3.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных сведений и известных технических решений явным образом не следует, что заявленный новый спутниковый речной компас с дополнительным блоком вычисления угловой скорости поворота, местоположения носа и кормы судна относительно оси и кромок судового хода является очевидным для специалистов в области технических средств судовождения.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и элементы вычислительной техники, а также существующие технические средства навигации.
Технико-экономическая эффективность заявленного спутникового речного компаса судна заключается:
- в исключении риска влияния человеческого фактора на безопасность плавания судна и в первую очередь при прохождении крутых поворотов со свальным течением;
- в повышении производительности труда вахтенного помощника капитана на 15-20%;
- в повышении навигационной безопасности плавания за счет исключения отвлечений вахтенного помощника капитана от несения ходовой вахты для производства штурманских расчетов и введения вручную необходимых поправок в авторулевой на 10%.
Литература
1. Смирнов Е.Л., Яловенко А.В., Якушенков А.А. Технические средства судовождения. - М.: Транспорт, 1988. - 376 с.
2. Спутниковый компас SC-110. Рекламный проспект фирмы FURUNO.
3. Катенин В.А., Бойков А.В., Лысиков А.В. К вопросу обоснования допустимой погрешности места судна при плавании в автоматическом режиме по внутренним водным путям // Речной транспорт, № 5, 2007. - С.73-77.
4. Вагущенко Л.Л. Интегрированные системы ходового мостика. - Одесса: Латстар, 2003. - 170 с.
5. Яворский Б.М., Детлаф А.А. Справочник по физике: 4-е изд., испр. - М.: Наука, Физматлит, 1996. - 624 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2001 |
|
RU2207585C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
Изобретение относится к области судового приборостроения и может быть использовано для определения курса, угловой скорости поворота, местоположения носа и кормы судна относительно оси и кромок судового хода при прохождении сложных участков (изгибов) реки со свальными течениями. Технический результат - расширение функциональных возможностей. Для достижения данного результата спутниковый речной компас содержит две разнесенные в диаметральной плоскости судна антенны спутниковых навигационных систем, процессор, электронную картографическую навигационно-информационную систему, авторулевой, гирокомпас, радиолокационную станцию, эхолот. При этом в состав компаса дополнительно введен вычислитель угловой скорости поворота, местоположения носа и кормы судна относительно оси и кромок судового хода. 3 ил.
Спутниковый речной компас, содержащий две разнесенные в диаметральной плоскости антенны DGPS в носу и корме судна, процессор и дисплей, при этом выходы антенн через многоканальный приемник, а также выход гирокомпаса соединены с входом процессора, выходы которого соединены с дисплеем, эхолотом, электронной картографической навигационно-информационной системой (ЭКНИС), а через нее с авторулевым, радиолокационной станцией, выход которой соединен с входом ЭКНИС, автоматической идентификационной системой, отличающийся тем, что, с целью расширения функциональных возможностей спутникового речного компаса, в него дополнительно введен блок расчета курса (КСНС) угловой скорости поворота (ω) судна, а также определения местоположения носа и кормы (Мн, Мк) судна и отображения их относительно оси и кромок судового хода на дисплее и ЭКНИС, при этом вход данного блока подключен к выходу приемника спутниковых сигналов, а его выход подключен к входу процессора.
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
| Рекламный проспект фирмы FURUNO | |||
| Речной транспорт, №5, 2007, с.85 | |||
| СМИРНОВ Е.Л., ЯЛОВЕНКО А.В., ЯКУШЕНКОВ А.А | |||
| Технические средства судовождения | |||
| - М.: Транспорт, 1988, 376 с | |||
| СПОСОБ ГЛОБАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И ПРИБОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2306528C2 |
| Способ приготовления хромового катализатора для деструктивного дегидрирования | 1936 |
|
SU48212A1 |
| DE 3019372 А1, 26.11.1981. | |||

