Техническое решение относится к судовождению и может быть использовано в средствах автоматического управления движением судов, а также в системах динамического позиционирования судов.
Основные принципы построения систем автоматического управления движением судов (АУДС) и их обобщенные схемы приведены в известных источниках [3, 4]. Позднее был запатентован ряд устройств АУДС, позволяющих в той или иной мере расширить их функциональные возможности, повысить эффективность их использования и безопасность судовождения: авторулевой судна [5], устройства управления движением судна [2, 6, 7], многоцелевая корабельная система управления [8], морской интеллектуальный тренажер [9], устройство [1], реализующее способ автоматической проводки судов.
Общим признаком известных устройств АУДС [2, 3-9], как правило, является то, что они содержат блок измерения параметров движения судна, блок датчиков внешних воздействий, блок объектов управления, информационные выходы которых подключены к вычислительному блоку, а также блок управления, связанный информационно-управляющим входом-выходом с вычислительным блоком, управляющие выходы которого подключены к блоку объектов управления, при этом вычислительный блок выполнен с возможностью сравнения данных измерений текущих параметров движения судна с заданными программными значениями и формирования по результатам этого сравнения управляющих сигналов на блок объектов управления.
Однако во всех известных устройствах АУДС [2, 5-9] состав аппаратуры не является полным и оптимальным для реализации потенциальных функциональных возможностей [3]: измерители параметров движения (курса, скорости и координат судна) не имеют требуемого параллельного дублирования, блок датчиков внешних воздействий учитывает, как правило, только воздействие ветра и волнения, а объектами управления в таких устройствах АУДС являются главные движители с гребными винтами и рулевое устройство. Неадекватность требованиям полноты и оптимизации состава аппаратуры таких устройств АУДС приводит [3] к недостаточной точности обеспечения заданной динамики движения судна (или удержания судна в заданном положении), к их недостаточной эксплуатационной надежности и, как следствие, снижает безопасность судовождения.
Устройство [1, фиг.1], реализующее способ автоматической проводки судов и принятое за прототип, содержит блок измерителей параметров движения судна (ИПДС), блок датчиков внешних воздействий (ДВВ), блок объектов управления (ОУ), информационные выходы которых подключены к вычислительному блоку (ВБ), а также блок управления, связанный информационно-управляющим входом-выходом с ВБ, причем блок ИПДС включает блок судовых навигационных приборов (СНП) в составе эхолота, лага и гирокомпаса, навигационную радиолокационную станцию (НРЛС) и навигационный модуль (НМ) в виде приемоиндикатора спутниковой навигационной системы (СНС), блок ДВВ включает датчики параметров ветра и волнения, блок ОУ включает объекты управления в виде судовых движителей и рулевого устройства с подключенными к ним датчиками ОУ (ДОУ), вычислительный блок ВБ включает контроллер, блок программного обеспечения (ПО) и центральный процессор (ЦП), при этом к входам контроллера подключены информационные выходы блоков ИПДС, ДВВ и ОУ, а выходы контроллера и блока ПО подключены к входам ЦП, который выполнен с возможностью сравнения данных измерений текущих параметров движения судна с заданными программными значениями и формирования по результатам этого сравнения управляющих сигналов на ОУ.
Одним из основных недостатков устройства [1], как и других известных аналогов, являются недостаточная полнота и оптимальность реализации функциональных возможностей: наличие в НМ аппаратуры лишь одной СНС GPS и отсутствие резервирования средств координирования судна посредством ряда других устройств снижает точность определения места при движении судна по заданной траектории, достоверность и эксплуатационную надежность данных, при этом неисправность СНС GPS влечет за собой сбои в работе устройства АУДС [1]. Неполнота измерений внешних воздействий (не учитываются течение и приливные воздействия) и ограничение ОУ главным судовым движителем и рулевым устройством в устройстве [1] также приводят к снижению точности и надежности судовождения.
Кроме того, известная система АУДС [1] требует конструктивной доработки для реализации эффективной промышленной применимости. При этом ссылки на усложнение устройства и повышение его стоимости при расширении состава аппаратуры нельзя признать обоснованными (особенно для крупнотоннажных судов), поскольку некоторое усложнение аппаратуры для использования избыточных измерений компенсируется повышением точности и, как следствие, повышением надежности управления движением судна и безопасности судовождения. Стоимость узлов и составляющих элементов в настоящее время не может считаться существенным препятствием для создания высокоэффективных и надежных систем АУДС с широким спектром функциональных возможностей, особенно для крупнотоннажных танкеров, геофизических, исследовательских, буровых судов, а также военных кораблей.
Точность, достоверность и надежность управления движением судна могут быть повышены путем использования избыточной исходной информации и рациональной конструкции систем АУДС [3, 4].
Сущность предлагаемого технического решения заключается в создании системы АУДС, реализующей максимальную синергию совокупного применения аппаратуры ряда различных средств координирования судна, полноты измерений внешних возмущающих воздействий и использования в качестве объектов управления всех без исключения движительных судовых систем и устройств.
Основной технический результат - расширение функциональных возможностей АУДС при повышении точности и достоверной информативности путем определения и обработки избыточных измерений параметров комплексным составом аппаратуры, что, в свою очередь, обеспечивает эксплуатационную надежность системы АУДС и безопасность судовождения и тем самым позволяет достигнуть оптимального критерия функционирования системы АУДС «сложность - стоимость - эффективность».
Технический результат достигается следующим образом.
Система автоматического управления движением судна (АУДС) содержит блок измерителей параметров движения судна (ИПДС), блок датчиков внешних воздействий (ДВВ), блок объектов управления (ОУ), информационные выходы которых подключены к вычислительному блоку (ВБ), а также блок управления, связанный информационно-управляющим входом-выходом с ВБ, причем блок ИПДС включает блок судовых навигационных приборов (СНП) в составе эхолота, лага и гирокомпаса, навигационную радиолокационную станцию (НРЛС) и навигационный модуль (НМ) в виде приемоиндикатора спутниковой навигационной системы (СНС), блок ДВВ включает датчики параметров ветра и волнения, блок ОУ включает объекты управления в виде судовых движителей и рулевого устройства с подключенными к ним датчиками ОУ (ДОУ), вычислительный блок ВБ включает контроллер, блок программного обеспечения (ПО) и центральный процессор (ЦП), при этом к входам контроллера подключены информационные выходы блоков ИПДС, ДВВ и ОУ, а выходы контроллера и блока ПО подключены к входам ЦП, который выполнен с возможностью сравнения данных измерений текущих параметров движения судна с заданными программными значениями и формирования по результатам этого сравнения управляющих сигналов на ОУ.
Отличительной особенностью системы АУДС является то, что навигационный модуль НМ включает аппаратуру дифференциального варианта СНС GPS, аппаратуру дифференциального варианта СНС «ГЛОНАСС», аппаратуру инерциальной навигационной системы (ИНС), аппаратуру радионавигационных систем (РНС), аппаратуру гидроакустических навигационных систем (ГНС) и аппаратуру радиогеодезических систем (РГС), причем выходы аппаратуры СНС GPS, СНС «ГЛОНАСС», ИНС, РНС, ГНС И РГС подключены к входам контроллера вычислительного блока ВБ. Блок датчиков внешних воздействий ДВВ дополнительно к датчикам параметров ветра и волнения содержит датчики параметров течения и приливного воздействия, причем выходы всех датчиков блока ДВВ подключены к соответствующим входам контроллера вычислительного блока ВБ. Блок ОУ включает главные движители с гребными винтами регулируемой скорости или регулируемого шага, рулевое устройство, двигатели подруливающих устройств (ПрУ) типа «винт в трубе», поворотные двигатели регулируемой скорости или регулируемого шага поворотных движительно-рулевых колонок (ПДРК) с соответствующими датчиками ДОУ управляющих воздействий на эти ОУ. Блок управления выполнен в виде модуля судоводителя (МС) и включает блок управления и контроля (БУК), связанный информационно-управляющим входом-выходом с блоком отображения информации (БОИ), выход которого подключен к блоку регистрации (БР), причем блок БУК связан информационно-управляющим входом-выходом с центральным процессором ЦП вычислительного блока ВБ, а управляющие выходы блока БУК подключены к входам блоков ИПДС, ДВВ и ОУ.
Отличием системы АУДС является также то, что вычислительный блок ВБ с соответствующим программным обеспечением и модуль судоводителя МС подключены к бортовой локальной информационно-вычислительной сети (ЛВС) судна с возможностью реализации линий обмена информацией с судовыми техническими системами и средствами, а также пользователями системы АУДС.
При этом модуль судоводителя МС выполнен в виде стационарного оборудования в рулевой рубке судна, а также в виде дополнительных переносных модулей пользователей на базе персональных компьютеров типа ноутбук, включающих средства сопряжения с бортовой локальной вычислительной сетью ЛВС.
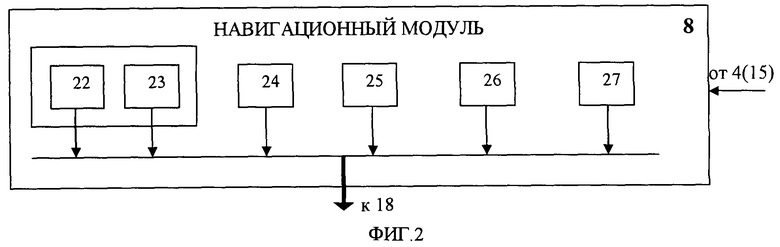
На фиг.1 представлена общая конструктивная схема системы автоматического управления движением судна; на фиг.2 приведена схема навигационного модуля определения местоположения судна.
На чертежах приняты следующие обозначения:
1 - блок измерителей параметров движения судна (блок ИПДС);
2 - блок датчиков внешних воздействий (блок ДВВ);
3 - блок объектов управления (блок ОУ);
4 - модуль судоводителя (МС);
5 - вычислительный блок (ВБ) сбора и обработки информации;
6 - блок судовых навигационных приборов (блок СНП): эхолот, лаг, гирокомпас;
7 - навигационная РЛС (НРЛС);
8 - навигационный модуль (НМ) определения местоположения судна;
9 - датчик параметров ветра;
10 - датчик параметров волнения;
11 - датчик параметров течения;
12 - датчик параметров приливного воздействия;
13 - объекты управления (ОУ): гребные винты, подруливающие устройства и т.п.;
14 - датчики объектов управления (ДОУ);
15 - блок управления и контроля (БУК);
16 - блок отображения (визуализации) информации БОИ;
17 - блок регистрации (прокладчик, принтер и т.п.) - БР;
18 - контроллер вычислительного блока;
19 - блок программного обеспечения (блок ПО);
20 - центральный процессор (ЦП);
21 - выход управляющих воздействий на судно;
22 - аппаратура СНС GPS (дифференциальный режим);
23 - аппаратура СНС «ГЛОНАСС» (дифференциальный режим);
24 - аппаратура инерциальной навигационной системы (ИНС);
25 - аппаратура радионавигационных систем (РНС);
26 - аппаратура гидроакустических навигационных систем (ГНС);
27 - аппаратура радиогеодезических систем (РГС).
Работа системы АУДС заключается в следующем.
Процесс автоматического управления движением судна, как правило, включает [3, 4] измерение параметров движения судна блоком ИПДС 1, измерение параметров внешних воздействий блоком ДВВ 2, сравнение в вычислительном блоке ВБ 5 данных блока ИПДС 1 текущих параметров движения судна с заданными блоком ПО 19 программными значениями модели движения, формирование по результатам этого сравнения управляющих сигналов на ОУ 13 блока ОУ 3. Модуль судоводителя 4 служит для управления и контроля этого процесса.
Особенности работы предложенной системы АУДС (фиг.1) определяются новой совокупностью существенных признаков. На входы контроллера 18 поступает информация с выходов блока СНП 6, НРЛС 7, а также с выходов навигационного модуля НМ 8, который включает (фиг.2) совокупность аппаратуры GPS 22, аппаратуры 23 СНС «ГЛОНАСС», аппаратуры 24 ИНС, аппаратуры 25 РНС, аппаратуры 26 ГНС и аппаратуры 27 РГС. Структура и работа таких типов аппаратуры 22-27 известны и описаны, например, в книге: Соненберг Г.Д. Радиолокационные и навигационные системы: пер. с англ. - Л.: Судостроение, 1982. - 400 с. Избыточность измерений аппаратурой 22-27 в совокупности с данными блоков СНП 6 и НРЛС 7 обеспечивает повышение точности определения места судна [3, 4]. Комплексная информация совокупности различных типов аппаратуры 6, 7, 22-27 по определению координат судна обрабатывается ЦП 20 посредством фильтрации (например, фильтрации Колмана) и временного сглаживания (процедура обработки данных в комплексной навигационной системе известна и описана, например, в [3]). Значения измеренных параметров внешних воздействий ветра, волнения, течений и приливов, определяемые датчиками 9-12 блока ДВВ 2, и информация датчиков ДОУ 14 блока ОУ 3 также поступают на вход контроллера 18 и далее в ЦП 20, где определяются вектор наблюдений и вектор возмущающих воздействий, а также формируется вектор управления на ОУ 13 блока 3 с выходом 21 управляющих воздействий на судно. Блок 16 отображения информации БОИ и блок 17 регистрации БР являются устройствами визуализации, хранения и вывода текстовой и графической информации и включают лазерный струйный принтер, графопостроитель-плоттер цифровых электронных карт в заданном масштабе и в заданной системе координат, а также устройство магнитной записи данных, выполненное в виде магнитно-оптического накопителя. Вычислительный блок ВБ 5 с соответствующим программным обеспечением блока 19 ПО и модуль судоводителя МС 4 подключены к бортовой ЛВС судна с возможностью реализации линий обмена информацией с судовыми техническими системами и средствами (блоки 1, 2 и 3), а также пользователями системы АУДС. Модуль судоводителя МС 4 может быть выполнен в виде стационарного оборудования в рулевой рубке судна, а также в виде дополнительных переносных модулей на базе персональных компьютеров типа ноутбук, включающих средства сопряжения с бортовой локальной вычислительной сетью ЛВС.
Источники информации (по уровню техники)
I. Прототип и аналоги:
1. RU 2277495 С 1, 10.06.2006 (прототип).
2. RU 2150409 С 1, 10.06.2000 (аналог).
3. Золотов В.В., Фрейдзон И.Р. Управляющие комплексы сложных корабельных систем. - Л.: Судостроение, 1986. - 232 с. (аналог: с.64-73, рис.3.2).
II. Дополнительные источники (по уровню техники)
4. Родионов А.И., Сазонов А.Е. Автоматизация судовождения. - 2-е изд., перераб. и доп. - М.: Транспорт, 1983. - 216 с. (с.120-126).
5. JP 62-24597, 28.07.1987.
6. SU 1150155 А, 15.04.1985.
7. SU 979204 А, 07.12.1982.
8. RU 45032 U1, 10.04.2005.
9. RU 2251157 С2, 27.04.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЁРНЫЙ ЦЕНТР ДЛЯ ЭКИПАЖЕЙ СУДОВ | 2016 |
|
RU2632675C2 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2428350C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ СУДНА С ПОМОЩЬЮ НЕЧЕТКОЙ ЛОГИКИ | 2018 |
|
RU2678762C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |
Изобретение относится к средствам автоматического управления движением судов и динамического позиционирования судов. Предложенная система реализует максимальную синергию совокупного применения аппаратуры ряда различных средств координирования судна, полноты измерений внешних возмущающих воздействий и использования в качестве объектов управления всех без исключения движительных судовых систем и устройств. В состав предложенной системы входят: блок измерителей параметров движения судна, блок датчиков внешних воздействий, блок объектов управления, вычислительный блок, блок управления. Навигационный модуль в блоке измерителей параметров движения судна включает аппаратуру дифференциальных вариантов спутниковых навигационных систем GPS и «ГЛОНАСС», аппаратуру инерциальной навигационной системы, аппаратуру радионавигационных систем, аппаратуру гидроакустических навигационных систем и аппаратуру радиогеодезических систем. Блок датчиков внешних воздействий, помимо датчиков параметров ветра и волнения, содержит датчики параметров течения и приливного воздействия. Блок объектов управления включает главные движители с гребными винтами регулируемой скорости или регулируемого шага, рулевое устройство, двигатели подруливающих устройств типа «винт в трубе», поворотные двигатели регулируемой скорости или регулируемого шага поворотных движительно-рулевых колонок с соответствующими датчиками управляющих воздействий. Блок управления выполнен в виде модуля судоводителя и содержит блок управления и контроля. Технический результат: расширение функциональных возможностей системы при повышении точности и достоверной информативности путем определения и обработки избыточных измерений параметров комплексным составом аппаратуры, что, в свою очередь, обеспечивает повышенную эксплуатационную надежность системы и безопасность судовождения. 2 з.п. ф-лы, 2 ил.
1. Система автоматического управления движением судна (АУДС), содержащая блок измерителей параметров движения судна (ИПДС), блок датчиков внешних воздействий (ДВВ), блок объектов управления (ОУ), информационные выходы которых подключены к вычислительному блоку (ВБ), а также блок управления, связанный информационно-управляющим входом-выходом с ВБ, причем блок ИПДС включает блок судовых навигационных приборов (СНП) в составе эхолота, лага и гирокомпаса, навигационную радиолокационную станцию (НРЛС) и навигационный модуль (НМ) в виде приемоиндикатора спутниковой навигационной системы (СНС), блок ДВВ включает датчики параметров ветра и волнения, блок ОУ включает объекты управления в виде судовых движителей и рулевого устройства с подключенными к ним датчиками ОУ (ДОУ), вычислительный блок ВБ включает контроллер, блок программного обеспечения (ПО) и центральный процессор (ЦП), при этом к входам контроллера подключены информационные выходы блоков ИПДС, ДВВ и ОУ, а выходы контроллера и блока ПО подключены к входам ЦП, который выполнен с возможностью сравнения данных измерений текущих параметров движения судна с заданными программными значениями и формирования по результатам этого сравнения управляющих сигналов на ОУ, отличающаяся тем, что навигационный модуль НМ включает аппаратуру дифференциального варианта СНС GPS, аппаратуру дифференциального варианта СНС «ГЛОНАСС», аппаратуру инерциальной навигационной системы (ИНС), аппаратуру радионавигационных систем (РНС), аппаратуру гидроакустических навигационных систем (ГНС) и аппаратуру радиогеодезических систем (РГС), причем выходы аппаратуры СНС GPS, СНС «ГЛОНАСС», ИНС, РНС, ГНС И РГС подключены к входам контроллера вычислительного блока ВБ, блок датчиков внешних воздействий ДВВ дополнительно к датчикам параметров ветра и волнения содержит датчики параметров течения и приливного воздействия, причем выходы всех датчиков блока ДВВ подключены к соответствующим входам контроллера вычислительного блока ВБ, блок ОУ включает главные движители с гребными винтами регулируемой скорости или регулируемого шага, рулевое устройство, двигатели подруливающих устройств (ПрУ) типа «винт в трубе», поворотные двигатели регулируемой скорости или регулируемого шага поворотных движительно-рулевых колонок (ПДРК) с соответствующими датчиками ДОУ управляющих воздействий на эти ОУ, блок управления выполнен в виде модуля судоводителя (МС) и включает блок управления и контроля (БУК), связанный информационно-управляющим входом-выходом с блоком отображения информации (БОИ), выход которого подключен к блоку регистрации (БР), причем блок БУК связан информационно-управляющим входом-выходом с центральным процессором ЦП вычислительного блока ВБ, а управляющие выходы блока БУК подключены к входам блоков ИПДС, ДВВ и ОУ.
2. Система АУДС по п.1, отличающаяся тем, что вычислительный блок ВБ с соответствующим программным обеспечением и модуль судоводителя МС подключены к бортовой локальной информационно-вычислительной сети (ЛВС) судна с возможностью реализации линий обмена информацией с судовыми техническими системами и средствами, а также пользователями системы АУДС.
3. Система АУДС по п.1, отличающаяся тем, что модуль судоводителя МС выполнен в виде стационарного оборудования в рулевой рубке судна, а также в виде дополнительных переносных модулей пользователей на базе персональных компьютеров типа ноутбук, включающих средства сопряжения с бортовой локальной вычислительной сетью ЛВС.
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| Способ регенерации диметилформамида и препарата ОП10 | 1953 |
|
SU99887A1 |

