Изобретение относится к гироскопическому приборостроению и может быть применено при калибровках (аттестации, поверках) гироскопов в процессе лабораторных, заводских и приемо-сдаточных испытаний.
Известны способы калибровки гироскопов на поворотных столах (см. У. Ригли, У. Холлистер, У. Денхард. Теория, проектирование и испытания гироскопов. М. Мир. 1972. с. 353-386), позволяющие проводить калибровку гироскопов в поле тяжести Земли. Указанные способы калибровки накладывают ограничения на модель ухода гироскопа, что снижает точность и достоверность калибровки, требуют дважды проводить точную выставку исследуемого гироскопа на поворотном столе по отношению к вектору угловой скорости суточного вращения Земли. Данная операция является сложной и трудоемкой, кроме того, в процессе ее выполнения могут быть существенно нарушены условия проведения эксперимента.
Предлагаемый способ калибровки гироскопов не имеет ограничений на модель погрешности гироскопа и обеспечивает выполнение всей программы однократной выставкой на поворотном столе исследуемого прибора по отношению к вектору угловой скорости суточного вращения Земли с последующим изменением его положения только посредством поворотного стола. Очевидно, что данные условия позволяют проводить более достоверную и точную калибровку гироскопа, приводят к уменьшению трудозатрат и времени на калибровку, обеспечивают более высокую технологичность эксперимента.
Существо способа поясняется следующим. Рассмотрим модель ухода гироскопа, коэффициенты которой наблюдаемы в поле тяжести Земли:
где
ω - суммарный уход гироскопа;
ωo - независящая от перегрузки составляющая ухода гироскопа;
ωx , ωy, ωz - зависящие в первой степени от перегрузки составляющие ухода гироскопа;
ωxy, ωxz, ωyz, ωyy, ωzz - зависящие во второй степени от перегрузки составляющие ухода гироскопа;
nx, ny, nz - проекции единичной перегрузки на оси, связанные с гироскопом;
OX - выходная ось, OY - входная ось, OZ - ось собственного вращения гироскопа.
Данная модель показывает взаимосвязь суммарного ухода гироскопа ω с девятью составляющими ωo, ωx,ωy, ωz, ωxy, ωxz, ωyz, ωyy, ωzz, которые требуется определить по результатам калибровки.
Очевидно, что для того, чтобы по измерениям суммарного ухода ω разделить искомые коэффициенты модели погрешностей, нужно произвести измерения в нескольких (не менее девяти) ориентациях гироскопа относительно вектора ускорения силы тяжести. Для того чтобы исключить влияние на калибровку угловой скорости суточного вращения Земли, исследуемый прибор устанавливают входной осью ортогонально оси Мира.
Известные способы калибровки производятся на поворотном столе, ось вращения которого ориентируется по оси Мира, гироскоп устанавливают входной осью ортогонально оси Мира, а выходную ось или ось собственного вращения ориентируют по оси вращения стола. Затем производится вращение стола вокруг оси Мира с целью измерения суммарного ухода ω при различных его положениях. Далее переустанавливают гироскоп так, чтобы его выходная ось или ось собственного вращения заняла противоположное направление и повторяют программу измерений суммарного ухода ω. По совокупности полученной информации определяют искомые коэффициенты модели уходов при допущении, что ωyy = -ωzz. Данное допущение является существенным и приводит к снижению точности и достоверности калибровки. Кроме того, две операции установки гироскопа на поворотном столе порождают недостатки, которые детально были рассмотрены ранее.
С целью исключения недостатков, присущих известным способам калибровки гироскопов, предлагается способ калибровки гироскопа на поворотном столе, в котором в процессе измерений входная ось занимает различные положения относительно плоскости меридиана в плоскости ортогональной оси Мира (соблюдается условие исключения влияния угловой скорости суточного вращения Земли на калибровку), а выходная ось или ось собственного вращения ориентируется относительно оси Мира в нескольких угловых положениях (таких угловых положений больше двух). Реализовать данный способ калибровки можно на поворотном столе, имеющим две оси вращения: одна обеспечивает вращение вокруг оси Мира, другая вокруг оси, ортогональной оси Мира. Указанную конструкцию нетрудно построить, используя, например, карданов подвес, применяемый в трехосных гиростабилизаторах.
Установка гироскопа на поворотном столе и его угловое положение в процессе реализации предлагаемого способа калибровки иллюстрируется чертежом, где показаны: трехгранник XпоYпоZпо, характеризующий исходное положение поворотного стола; трехгранник XпYпZп, характеризующий положение поворотного стола в процессе калибровки; трехгранник XYZ, связанный с исследуемым гироскопом. Трехгранник XпоYпоZпо ориентирован следующим образом: ось OYпо - по оси Мира, ось - OXпо в плоскости меридиана и составляет угол ϕ с вектором ускорения силы тяжести  (ϕ - ширина места), ось OZпо - дополняет систему до правой. В процессе калибровки поворотный стол вращается вокруг оси Мира на угол α1 (при этом ТГ XпоYпоZпо переходит в ТГ XпYпZп) и вокруг оси поворотного стола OXп, совпадающей с входной осью гироскопа, на угол α2. Угол α2 - это угол между осью Мира и осью собственного вращения или выходной осью исследуемого гироскопа, на чертеже и при последующем рассмотрении без потери общности выбрана ось собственного вращения гироскопа. Таким образом, множество всех возможных положений гироскопа в процессе калибровки по предлагаемому способу задается углами α1 и α2.
(ϕ - ширина места), ось OZпо - дополняет систему до правой. В процессе калибровки поворотный стол вращается вокруг оси Мира на угол α1 (при этом ТГ XпоYпоZпо переходит в ТГ XпYпZп) и вокруг оси поворотного стола OXп, совпадающей с входной осью гироскопа, на угол α2. Угол α2 - это угол между осью Мира и осью собственного вращения или выходной осью исследуемого гироскопа, на чертеже и при последующем рассмотрении без потери общности выбрана ось собственного вращения гироскопа. Таким образом, множество всех возможных положений гироскопа в процессе калибровки по предлагаемому способу задается углами α1 и α2.
Установим набор углов α1 и α2, на которых можно произвести полную калибровку гироскопа по предлагаемому способу в соответствии с моделью (1). Нетрудно видеть, что проекции единичной перегрузки на оси, связанные с гироскопом, определяются так:
ηx = sinα1•cosα2•cosϕ + sinα2•sinϕ,
Тогда выражение (1) (после подстановки формул (2) и преобразований) может быть записано в следующей векторно-матричной форме: (3)
(3)
где - вектор коэффициентов ряда Фурье;
- вектор коэффициентов ряда Фурье; - вектор калибруемых составляющих ухода гироскопа;
- вектор калибруемых составляющих ухода гироскопа;
H1(α1) - матрица размерности 1х5, составленная из тригонометрических функций угла α1, а H2(α2, ϕ) - матрица размерности 5х9, составленная из тригонометрических функций углов α2/и ϕ, вида
Из системы (3) следует, что для определения искомого вектора  по измерениям значений суммарного ухода ω, необходимо выбрать такой набор углов α1 и α2, чтобы из первого уравнения данной системы определялся вектор коэффициентов Фурье
по измерениям значений суммарного ухода ω, необходимо выбрать такой набор углов α1 и α2, чтобы из первого уравнения данной системы определялся вектор коэффициентов Фурье  а из второго по значениям вектора
а из второго по значениям вектора  был бы найден вектор калибруемых составляющих ухода гироскопа
был бы найден вектор калибруемых составляющих ухода гироскопа 
Первое уравнение системы (3) показывает, что для определения вектора  соответствующего фиксированному значению угла α2, в общем случае достаточно произвести измерения в пяти различных ориентациях поворотного стола по углу α1, обозначим их -
соответствующего фиксированному значению угла α2, в общем случае достаточно произвести измерения в пяти различных ориентациях поворотного стола по углу α1, обозначим их - 
Определим оптимальные значения α вида
вида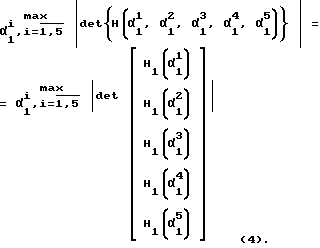
Выполнение данного критерия оптимальности, используемого и далее, соответствует минимальному влиянию измерительного шума на вычисление значений искомого вектора.
Нетрудно показать, что определитель (4) не зависит от выбора первого (начального) измерительного положения стола α
Структура матрицы H2(α2,ϕ) во втором уравнении системы (3) такова, что оно распадается на два независимых уравнения. По значениям a3, a4 можно определить составляющие ухода ωy , ωxy, ωyz. Для чего требуется произвести измерения не менее чем при двух значениях угла α2 - α
Очевидно, что оптимальная ориентация поворотного стола в данном случае может быть определена из условия максимума абсолютного значения следующего определителя.
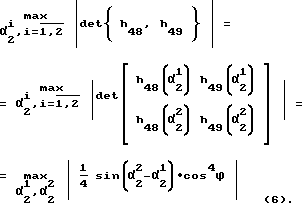
Максимум в выражении (6) не зависит от выбора первого измерительного положения α
Главное значение угла в выражении (7) дает оптимальный набор для разделения ωy, ωxy, ωyz при двух положениях поворотного стола по углу α2:
α
Для разделения составляющих ухода ωo, ωx, ωz, ωxz, ωyy, ωzz по значениям a1, a2, a5 двух измерительных положений по углу α2 недостаточно, так как соответствующий определитель равен нулю при любых значениях углов α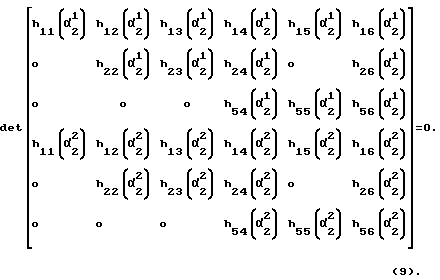
Данное свойство матрицы H2(α2,ϕ) делает необходимым для разделения составляющих ухода ωo, ωx, ωz, ωxz, ωyy, ωzz проводить измерения в трех положениях поворотного стола по углу α2 - α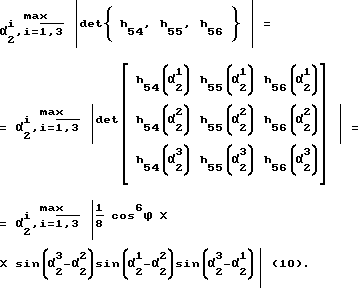
Максимум в выражении (10) также не зависит от выбора первого измерительного положения  определяется только углами переориентации поворотного стола и достигается при следующих значениях углов переориентации:
определяется только углами переориентации поворотного стола и достигается при следующих значениях углов переориентации: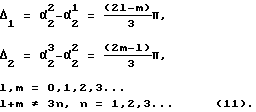
Главные значения в выражениях (11) дают две группы оптимальных углов ориентации поворотного стола по углу α2:
Первая группа углов не удовлетворяет условию максимума абсолютной величины определителя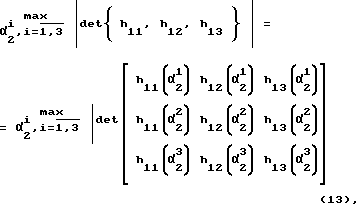
выполнение которого необходимо для оптимального разделения всей группы составляющих ухода ωo, ωx, ωz, ωxz, ωyy, ωzz, а вторая группа удовлетворяет условию (13) и является искомым оптимальным набором углов. Данный набор углов α2(α
а набор оптимальных углов по α1 естественно остается без изменений (14)
(14)
Выражения (14) задают 20 измерительных положений поворотного стола, обеспечивающих с максимальной точностью калибровку всех 9 составляющих ухода гироскопа по предлагаемому способу. Эта программа измерений имеет значительную избыточность, которая может быть также использована для повышения точности калибровки.
Проводить калибровку с использованием максимального числа измерений, пусть и оптимальных, не всегда рационально (например, с точки зрения минимизации трудозатрат и времени на калибровку). Очевидно, что число измерительных положений может быть уменьшено путем сокращения одного значения угла α2 в выражении (14). Тогда за оптимальный набор углов α2 целесообразно принять вторую группу выражения (12) или определить новую группу углов  доставляющих максимум компромиссному критерию:
доставляющих максимум компромиссному критерию:
являющемуся композицией критериев (6) и (10).
Нетрудно показать, что максимум в выражении (15) не зависит от выбора первого значения α
Зависимости (16) совместно с выражениями (5) определяют 15 субоптимальных измерительных положений поворотного стола:
Следует отметить, что реализация программы, задаваемой выражениями (17), обеспечивает отличие определителей det{ h48, h49} и det{h54, h55, h56} от максимальных значений не более 7 и 4% соответственно, что практически незначительно. Тем самым обеспечивается мягкий компромисс между точностью калибровки и числом измерительных положений, то есть удалось сократить количество измерительных положений с 20 до 15 без какой-либо существенной потери в точности калибровки. Кроме того, использование симметричных наборов измерительных положений (17) и наборов, задаваемых выражением (5) и второй группой выражений (12), имеет практическую ценность и в том, что позволяет в значительной степени компенсировать или выявить влияние на уход гироскопа факторов, не учтенных в модели (1). Вместе с тем и данные наборы, задающие программы из 15 измерительных положений, избыточны.
Определим минимальный набор измерительных положений, обеспечивающий калибровку гироскопа по предлагаемому способу. Нетрудно видеть, что если развернуть поворотный стол вокруг оси Мира на 90o (α1 = 90o), то проекция вектора ускорения силы тяжести на входную ось гироскопа будет равна нулю (hy = 0). Управляя далее только углом α2, можно реализовать положения поворотного стола, в которых входная ось и ось собственного вращения гироскопа попеременно совпадают с направлением силы тяжести или имеют противоположное направление. В данных положениях всегда две проекции единичной перегрузки будут равны нулю, что делает возможным определение четырех составляющих модели ухода гироскопа (1).
Действительно, из чертежа следует, что при  α2 = ϕ - π, входная ось и ось собственного вращения гироскопа ортогональны вектору ускорения силы тяжести
α2 = ϕ - π, входная ось и ось собственного вращения гироскопа ортогональны вектору ускорения силы тяжести  (hy = 0, hz = 0), а выходная ось занимает положения: по направлению вектора
(hy = 0, hz = 0), а выходная ось занимает положения: по направлению вектора  α2 = ϕ); противоположное направление к вектору
α2 = ϕ); противоположное направление к вектору  α2 = ϕ - π). . Тогда выражение (1) принимает следующий вид:
α2 = ϕ - π). . Тогда выражение (1) принимает следующий вид: (18)
(18)
Из уравнений (18) ясно определяются составляющие ухода ωo и ωx. При значениях углов 
 входная и выходная оси гироскопа ортогональны вектору
входная и выходная оси гироскопа ортогональны вектору  а ось собственного вращения занимает положения: по направлению вектора
а ось собственного вращения занимает положения: по направлению вектора  противоположное направление к вектору
противоположное направление к вектору  Из выражения (1) имеем:
Из выражения (1) имеем:
Используя полученное из уравнений (18) значение ωo, по уравнениям (19) легко определить ωz и ωzz.
Таким образом, в четырех положениях поворотного стола  при α
при α
 определяют четыре составляющих модели ухода гироскопа ωo, ωx, ωz, ωzz. . Тогда задача отыскания оставшихся составляющих ухода (ωy, ωz, ωxy, ωxz, ωzz) может быть описана упрощенной системой векторно-матричных уравнений (3) вида:
определяют четыре составляющих модели ухода гироскопа ωo, ωx, ωz, ωzz. . Тогда задача отыскания оставшихся составляющих ухода (ωy, ωz, ωxy, ωxz, ωzz) может быть описана упрощенной системой векторно-матричных уравнений (3) вида:
где
- вектор калибруемых составляющих ухода гироскопа;
- вектор коррекции вектора коэффициентов Фурье  по откалиброванным значениям составляющих ухода гироскопа ωo, ωx, ωz, ωzz;
по откалиброванным значениям составляющих ухода гироскопа ωo, ωx, ωz, ωzz;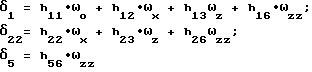
H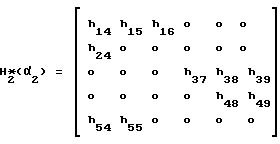
Матрица H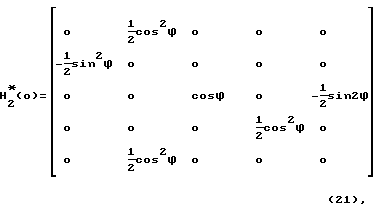
и обеспечивает на наборе углов вида (5) раздельное определение составляющих ухода ωxz, ωyy, ωxy, а составляющие ухода ωy и ωyz находятся в линейной комбинации  Легко видеть, что для разделения полученной комбинации нужно использовать измерение в таком положении поворотного стола, когда hz = 0, а ny ≠ 0. Это положение может быть задано следующими углами α1 = 0,
Легко видеть, что для разделения полученной комбинации нужно использовать измерение в таком положении поворотного стола, когда hz = 0, а ny ≠ 0. Это положение может быть задано следующими углами α1 = 0,  при которых hx = sinϕ, hy = cosϕ, nz = 0 и выражение (1) имеет одно неизвестное ωy и записывается так:
при которых hx = sinϕ, hy = cosϕ, nz = 0 и выражение (1) имеет одно неизвестное ωy и записывается так:
Вычисленное из уравнения (22) значение ωy разрешает полученную ранее комбинацию  относительно последней неизвестной составляющей ухода ωyz; в результате оказываются определенными все девять составляющих ухода гироскопа с использованием десяти измерительных положений.
относительно последней неизвестной составляющей ухода ωyz; в результате оказываются определенными все девять составляющих ухода гироскопа с использованием десяти измерительных положений.
Следует отметить, что точность калибровки гироскопа на 10 данных измерительных положений будет выше, чем у известных способов калибровки (см. У. Ригли, У. Холлистер, У. Дернхард. Теория, проектирования и испытания гироскопов) не только из-за отсутствия ограничений на модель погрешности гироскопа, но и благодаря тому, что определение составляющих ухода при α2 = 0 производится в схожих условиях с известными способами, а определение составляющих из уравнений (18), (19), (22) производится при максимальных значениях соответствующих определителей.
Анализ матриц H1(α1), H2(α2,ϕ) показывает, что не существует девяти измерительных положений, которые позволяют раздельно определить все составляющие ухода гироскопа по способам, требующим ортогональности входной оси гироскопа к оси Мира в процессе выполнения всей программы измерений, то есть десять измерительных положений являются минимально возможным числом.
В предлагаемом способе на 10 измерительных положениях производится полная калибровка всех составляющих ухода гироскопа без накладывания каких-либо ограничений на модель ухода гироскопа с точностью, превышающей точность калибровки в известных способах.
Таким образом, предложенный способ калибровки гироскопов включает однократную выставку исследуемого гироскопа на поворотном столе входной осью ортогонально оси Мира, задание нескольких измерительных положений путем вращений поворотного стола вокруг оси Мира и вокруг входной оси гироскопа на фиксированные углы, при этом входная ось гироскопа всегда остается ортогональной оси Мира и число различных значений угла поворота вокруг входной оси гироскопа - больше двух, измерение суммарного ухода в данных измерительных положениях, определение составляющих ухода гироскопа по совокупности данных, полученных по измерениям суммарного ухода в измерительных положениях поворотного стола. Способ обеспечивает полную калибровку гироскопа, снижает трудоемкость калибровки путем сокращения операций выставки гироскопа относительно оси Мира, не имеет ограничений на модель ухода гироскопа, повышает точность калибровки путем проведения измерений в оптимальных положениях поворотного стола и за счет рациональной избыточности, может быть реализован на минимальном наборе измерительных положений без потери отличительных эффективных свойств. Практическая реализация предлагаемого способа может быть осуществлена на поворотном столе, обеспечивающем задание программы измерений по предлагаемому способу, который может быть построен, например, путем использования карданового подвеса трехосного гиростабилизатора.
Способ может быть применен при калибровках (аттестации, поверках) гироскопов в процессе лабораторных, заводских и приемо-сдаточных испытаний. Гироскоп устанавливают на поворотном столе входной осью ортогонально оси Мира. Задают несколько измерительных положений путем вращений поворотного стола вокруг оси Мира и вокруг входной оси гироскопа на фиксированные углы. Число различных значений угла поворота вокруг входной оси гироскопа больше двух. Измеряют суммарный уход в измерительных положениях поворотного стола. Определяют составляющие ухода гироскопа. Способ обеспечивает полную калибровку гироскопа, снижает трудоемкость калибровки, повышает точность калибровки. 4 з.п.ф-лы, 1 ил.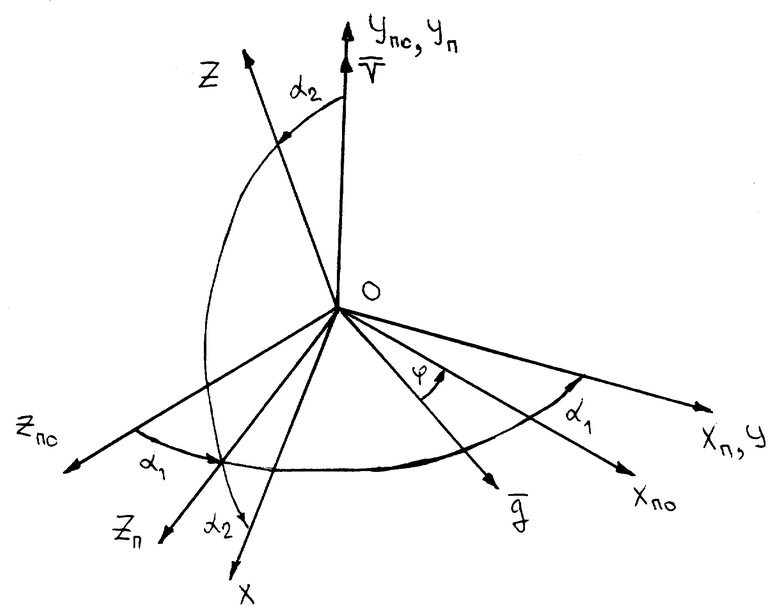
где α
α
α
4. Способ по п. 1, отличающийся тем, что при задании измерительных положений углы α1 и α2 принимают следующие значения:
α
5. Способ по п. 1, отличающийся тем, что 10 измерительных положений задают следующими значениями углов α1 и α2: 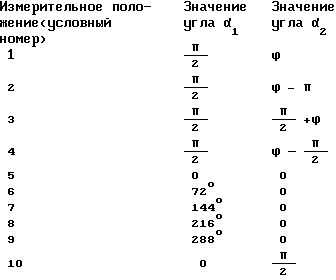
где ϕ - широта места установки поворотного стола.
| Ригли У | |||
| и др | |||
| Теория, проектирование и испытания гироскопов | |||
| - М.: Мир, 1972, с | |||
| Прибор для сжигания нефти | 1921 |
|
SU369A1 |
| US 3736791, 05.06.73 | |||
| GB 1094396 A, 30.06.64 | |||
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| Стенд для испытаний гироскопических приборов | 1990 |
|
SU1820219A1 |
| RU 94002637 A1, 27.11.95. | |||
