Настоящее изобретение имеет отношение главным образом к созданию системы обработки речевого сигнала и, в частности, многоимпульсной системы анализа.
Обработка речевого сигнала широко известна и часто применяется для сжатия поступающего речевого сигнала, как для его хранения, так и для последующей передачи. Обработка речевого сигнала обычно связана с делением входного речевого сигнала на блоки данных (кадры), с последующим анализом каждого блока данных для нахождения его компонентов. Затем полученные компоненты используются как для хранения, так и для последующей передачи.
Обычно анализатор кадра определяет кратковременные и долговременные характеристики речевого сигнала. Затем анализатор кадра может найти один или оба кратко- или долговременных компонента или "вклада" речевого сигнала. Например, анализ с линейным коэффициентом предсказания (LPC) позволяет получить кратковременные характеристики и вклады, а анализ основного тона и прогнозирование позволяют получить долговременные характеристики и долговременные вклады (компоненты).
Обычно оба или один из долго- или кратковременных компонентов прогнозирования вычитают из входного кадра, после чего остается вектор цели, форму которого следует определить. Такое определение параметров (вектора цели) может быть осуществлено при помощи многоимпульсного анализа (МРА), который подробно описан в разделе 6. 4. 2. книги Цифровая обработка речи, синтез и распознавание, автора Садаоки Фуруи, издательство Марсель Деккер Инк., Нью-Йорк, 1989 г.
При проведении МРА вектор цели, который образован множеством выборок, моделируется множеством импульсов (или пиков) одинаковой амплитуды, которые имеют различное местоположение и разные знаки (положительный или отрицательный). Для выбора каждого импульса его помещают в каждое местоположение выборки и находят отклик (эффект) при пропускании этого импульса через фильтр, параметры которого определены коэффициентами LPC. Выбирают импульс, который наиболее близко совпадает с вектором цели, и удаляют его отклик из вектора цели, в результате чего вырабатывается новый вектор цели. Процесс продолжают до получения заданного числа импульсов. Для целей хранения или передачи, результатом МРА анализа является набор импульсов местоположения и квантованные значения усиления.
Усиление обычно определяют по первому импульсу, который найден. Это усиление затем используют для остальных импульсов. К несчастью величина усиления для первого импульса не всегда является показательной для средней величины усиления вектора цели, в результате чего совпадение с вектором цели не всегда точное.
В связи с изложенным, задачей настоящего изобретения является создание улучшенной системы анализа речевого сигнала. В соответствии с первым вариантом осуществления настоящего изобретения, указанная система включает в себя кратковременный анализатор, генератор вектора цели и блок многоимпульсного анализатора с максимальным правдоподобием квантования (MLQ). Кратковременный анализатор производит определение кратковременных характеристик входного речевого сигнала. Генератор вектора цели вырабатывает вектор цели по меньшей мере из определенного входного сигнала. Блок MLQ многоимпульсного анализа оперирует над результирующим вектором цели.
Блок MLQ многоимпульсного анализа обычно производит определение уровня единичного усиления для многоимпульсной последовательности и осуществляет МРА с единичным усилением несколько раз, причем всякий раз с различным уровнем усиления. При этом уровни усиления находятся в диапазоне выше и ниже начального уровня усиления. Результирующие импульсы могут быть положительными или отрицательными.
Аналогично другим применениям с нахождением максимального правдоподобия, производят измерение качества полученного результата (в данном случае путем минимизации энергии вектора ошибки, который определяют как разницу между вектором цели и вектором оценки, полученным фильтрацией импульсной последовательности единичного усиления через распознающий фильтр со взвешиванием). Импульсная последовательность, которая минимизирует энергию вектора ошибки и его соответствующий уровень усиления (или коэффициент для уровня усиления), является выходным сигналом блока MLQ многоимпульсного анализа.
В соответствии с альтернативным вариантом осуществления настоящего изобретения, система включает в себя долговременный анализатор прогнозирования, а блок MLQ многоимпульсного анализа заменен блоком многоимпульсного анализа пачки импульсов. В соответствии с этим вариантом в блоке многоимпульсного анализа пачки импульсов используется смещение основного тона от долговременного анализатора для создания пачки импульсов равной амплитуды и одинакового знака, причем каждый импульс имеет смещение основного тона от предыдущих импульсов в пачке. Блок многоимпульсного анализа позволяет получить на его выходе сигнал, отображающий последовательность пачек импульсов, которая включает в себя положительные и отрицательные пачки импульсов, наилучшим образом отображающие вектор цели.
В соответствии с еще одним альтернативным вариантом осуществления настоящего изобретения система включает в себя блок MLQ многоимпульсного анализа пачки импульсов, который объединяет в себе операции в соответствии с двумя предыдущими вариантами осуществления настоящего изобретения. Другими словами, задают диапазон усилений и для каждого усиления находят пачки импульсов. Выходным сигналом является последовательность, которая наиболее близко совпадает с вектором цели.
В соответствии с еще одним последним альтернативным вариантом осуществления настоящего изобретения, производят сравнение выходных сигналов блоков максимального правдоподобия и многоимпульсного анализа пачки импульсов; последовательность, которая наиболее близко совпадает с вектором цели, будет выходным сигналом.
Настоящее изобретение может быть более полно понятно и оценено из последующего подробного его описания, приведенного со ссылкой на чертежи.
На фиг. 1 показана структурная схема, иллюстрирующая первый вариант осуществления системы обработки речевого сигнала в соответствии с настоящим изобретением.
На фиг. 2 показана блок-схема, иллюстрирующая работу многоимпульсного блока, входящего в систему фиг. 1, в котором используется квантование с максимальным правдоподобием (MP-MLQ).
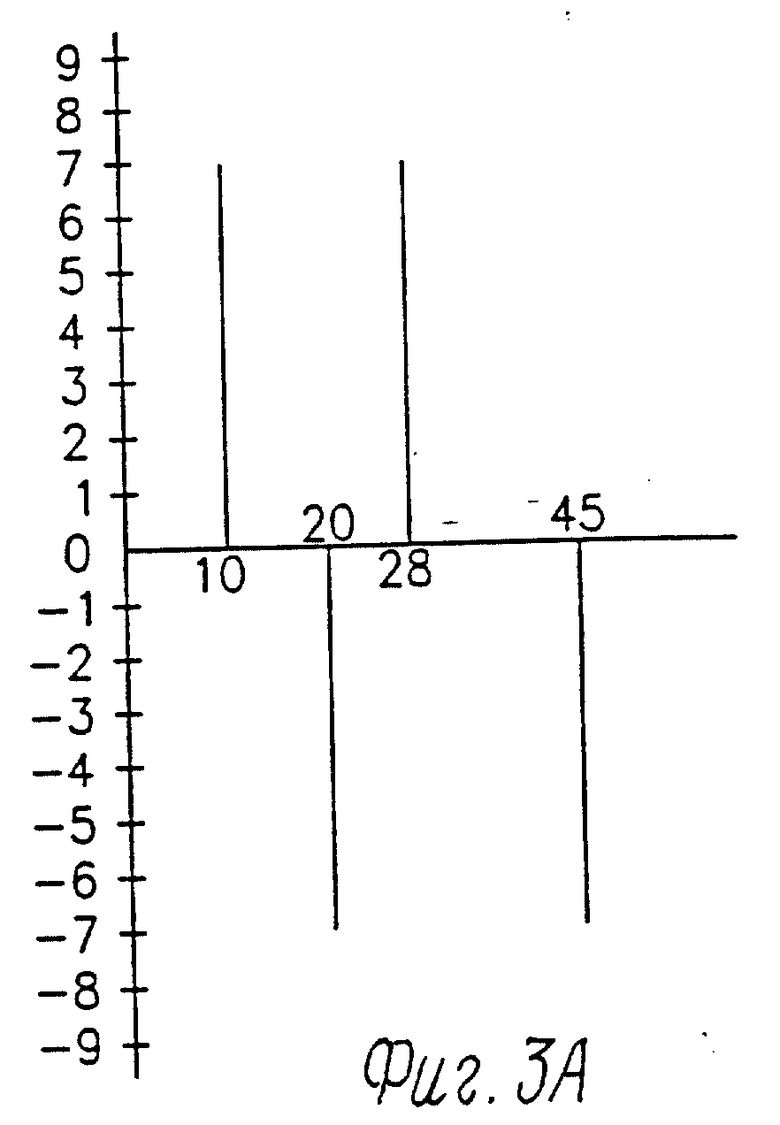
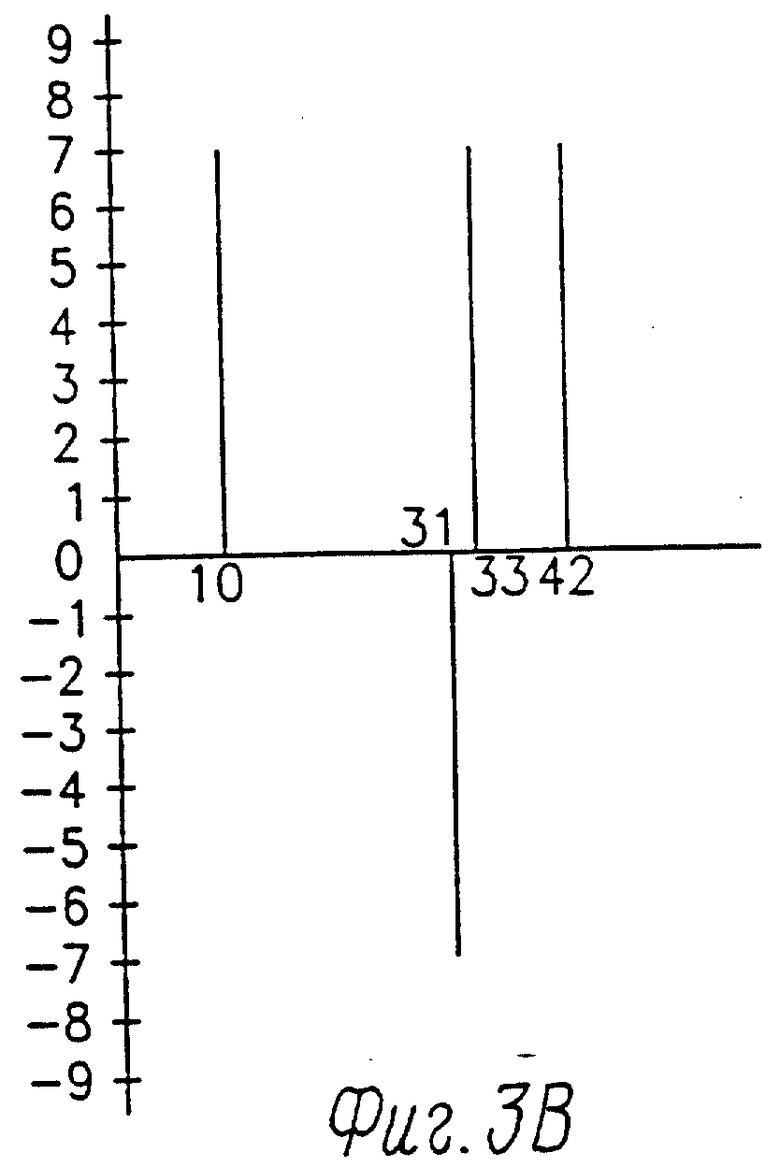
На фиг. 3A и 3B приведены графики, полезные для понимания работы блока фиг. 2.
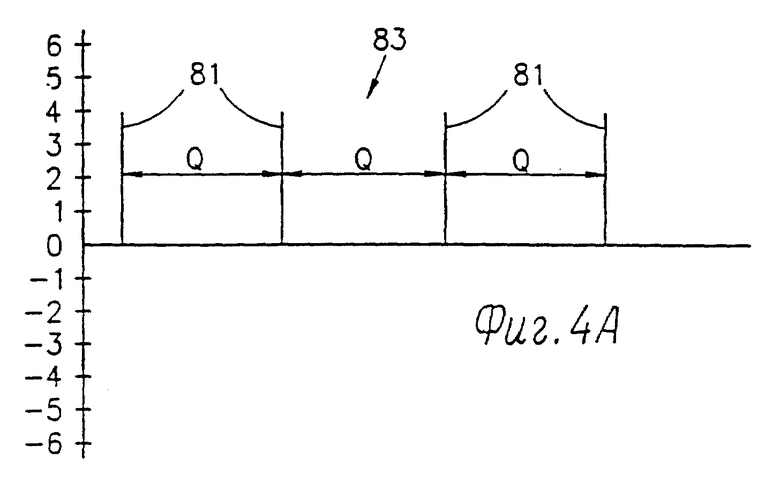
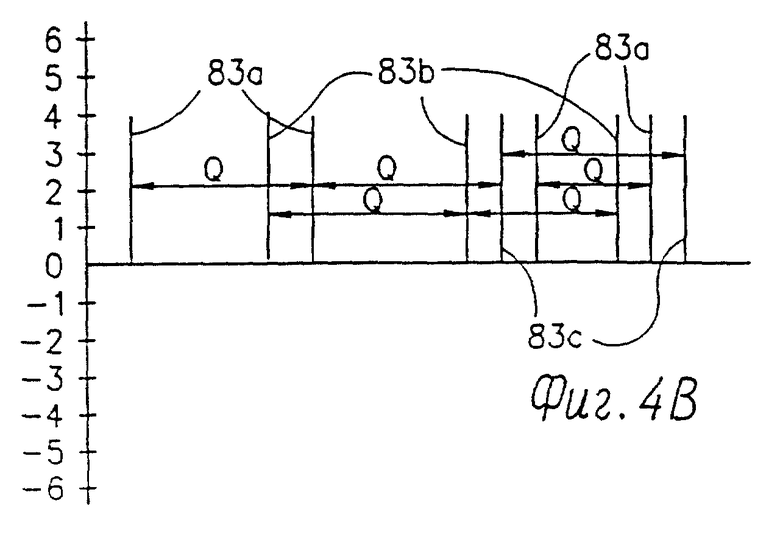
На фиг. 4A и 4B приведены графики, описывающие импульсные пачки и многоимпульсный анализ с использованием импульсных пачек, соответственно.
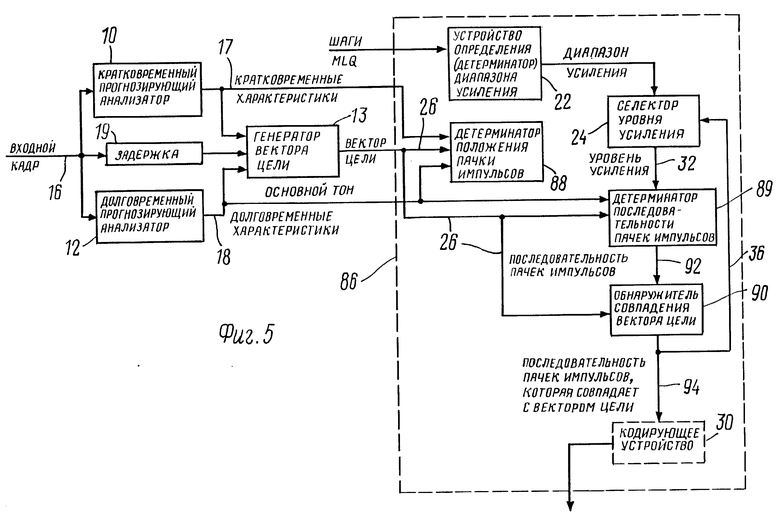
На фиг. 5 показана структурная схема, иллюстрирующая второй вариант осуществления системы обработки речевого сигнала в соответствии с настоящим изобретением, в котором используются импульсные пачки.
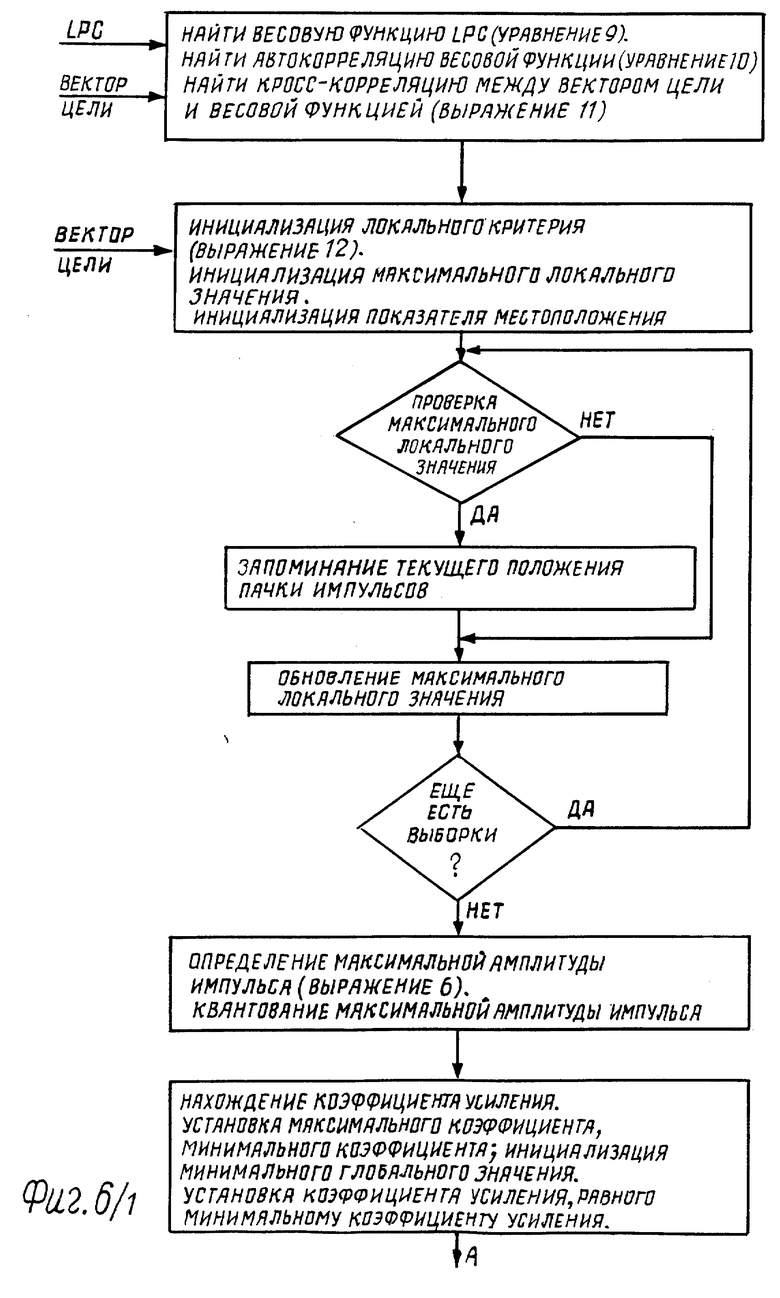
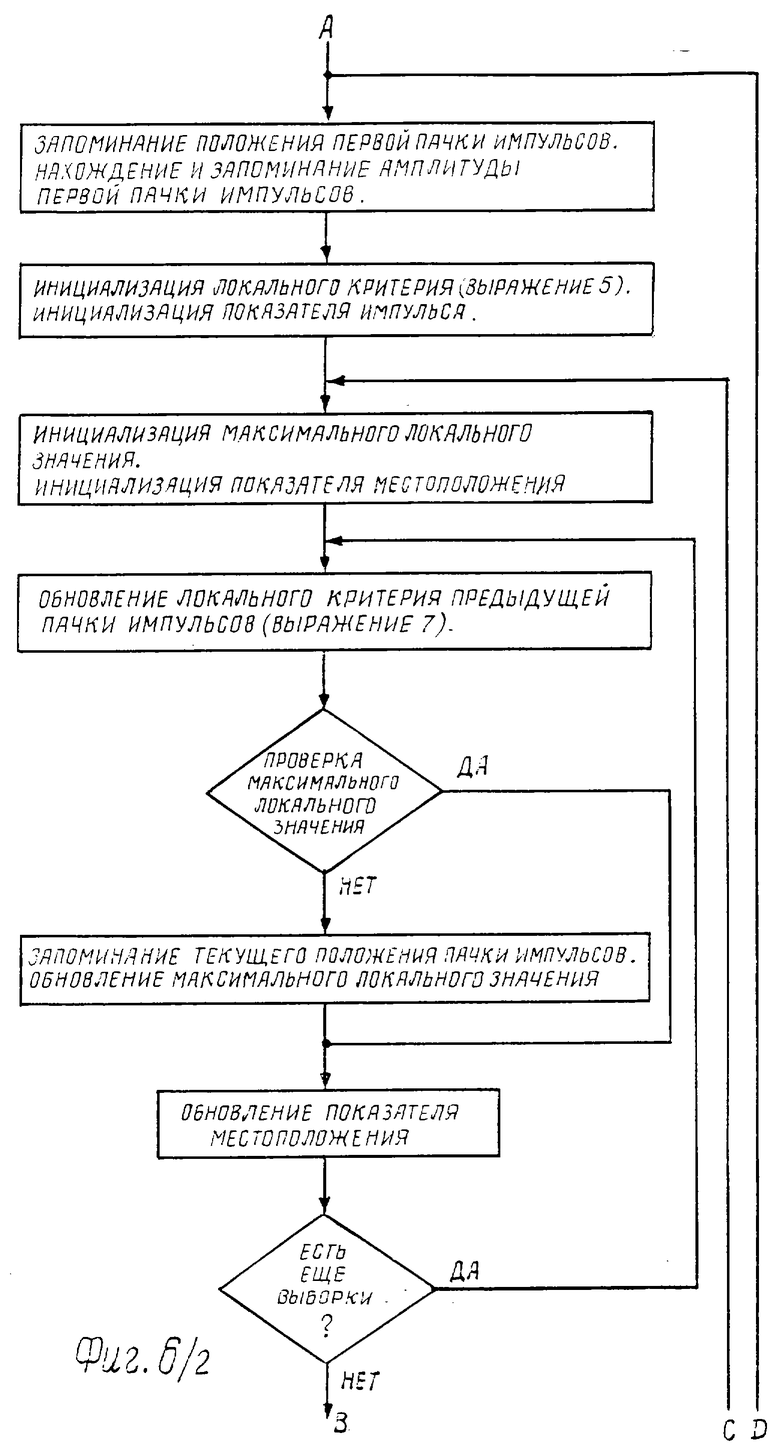
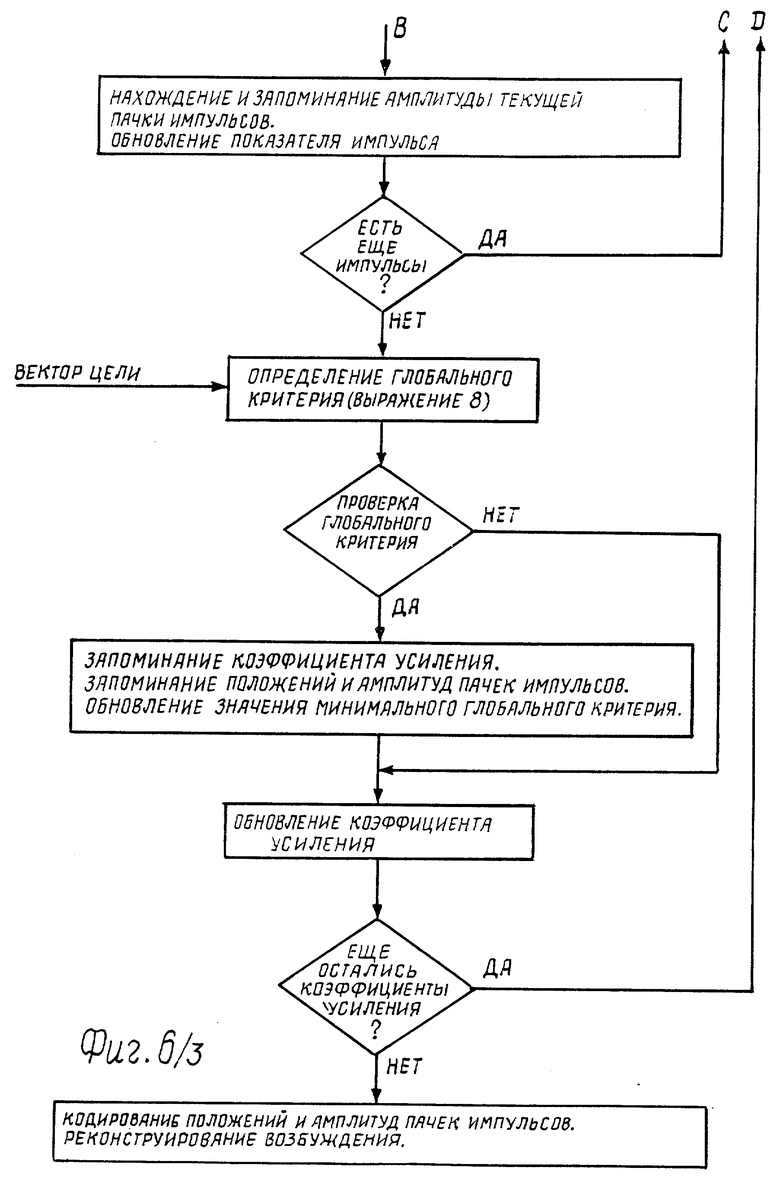
На фиг. 6 показана блок-схема, иллюстрирующая работу многоимпульсного блока анализа пачек импульсов, входящего в систему фиг. 5.
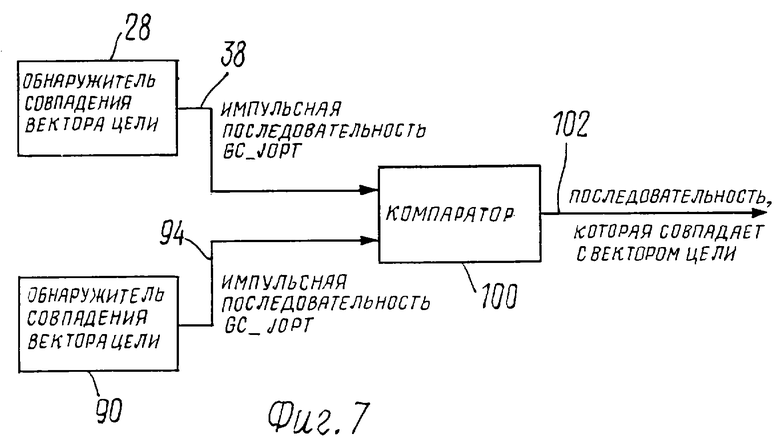
На фиг. 7 показана структурная схема, иллюстрирующая третий вариант, в котором производится сравнение выходных сигналов систем, показанных на фиг. 1 и 5.
Обратимся теперь к рассмотрению фиг. 1, 2, 3A и 3B, на которых показан первый вариант осуществления настоящего изобретения. Система обработки речевого сигнала в соответствии с настоящим изобретением включает в себя по меньшей мере один анализатор кратковременного прогнозирования 10, один анализатор долговременного прогнозирования 12, генератор вектора цели 13 и блок 14 многоимпульсного анализа с использованием квантования с максимальным правдоподобием (MP-MLQ).
Анализатор кратковременного прогнозирования 10 получает по входной линии 16 входной кадр речевого сигнала, образованный множеством оцифрованных речевых выборок. Обычно имеется 240 речевых выборок на кадр, причем кадры часто разделены на множество субкадров. Обычно используют 4 субкадра, каждый из которых имеет длину 60 речевых выборок. Входной кадр может представлять собой как исходный речевой сигнал, так и обработанную его версию.
Анализатор кратковременного прогнозирования 10 получает по входной линии 16 входной кадр и выдает по выходной линии 17 кратковременные характеристики входного кадра. В соответствии с одним из вариантов анализатор 10 осуществляет линейный прогнозирующий анализ, в результате которого получают линейные коэффициенты прогнозирования (LPC), которые характеризуют входной кадр.
Для целей настоящего изобретения анализатор 10 может осуществлять любой тип LPC анализа. Например, LPC анализ может быть осуществлен в соответствии с описанным в главе 6. 4. 2. книги Цифровая обработка речи, синтез и распознавание следующим образом: к окну из 180 выборок, центрированных на субкадре, прикладывается окно Хамминга (Hamming). Вырабатываются коэффициенты LPC десятого порядка с использованием рекурсивного метода Дурбина (Durbin). Процесс повторяют для каждого субкадра.
Анализатор долговременного прогнозирования 12 может представлять собой устройство долговременного прогнозирования любого типа, которое работает с входными кадрами, поступающими по линии 16. Анализатор долговременного прогнозирования 12 производит анализ множества субкадров входного кадра для определения значения основного тона речевого сигнала внутри каждого субкадра, причем значение основного тона определяется как ряд выборок, после которых речевой сигнал приблизительно повторяет себя. Значения основного тона обычно лежат в диапазоне от 20 до 146, причем 20 отображает речь высокого тона, а 146 отображает речь низкого тона.
Например, для каждых двух субкадров оценка основного тона может быть найдена максимизацией нормализованной функции кросс-корреляции субкадров s (n) в следующем виде:
В этом примере долговременный анализатор 12 выбирает коэффициент i, который максимизирует кросс-корреляцию C_ i в качестве значения основного тона для двух субкадров.
После определения долговременным анализатором 12 основного тона этот основной тон используется для определения информации долговременного прогнозирования для субкадров, которая выдается по выходной линии 18.
На генератор вектора цепи 13 поступают выходные сигналы долговременного анализатора 12 и кратковременного анализатора 10, также как и входной кадр от входной линии 16 через задержку 19. При поступлении указанных сигналов генератор 13 вырабатывает вектор цели из по меньшей мере одного субкадра входного кадра. Кратко- и долговременная информация может по желанию использоваться или не использоваться. Задержка 19 обеспечивает соответствие поступающего на генератор 13 входного кадра выходным сигналам анализаторов 10 и 12. На выходную линию 26 генератора 13 вектора цели, которая соединена с блоком MP-MLQ 14, подается выходной сигнал вектора цели. Вход блока MP-MLQ 14 обычно также соединен с выходной линией 17, на которой имеется кратковременный сигнал, вырабатываемый анализатором 10. Следует иметь в виду, что безо всякой потери общей применимости вектор цели блока MP-MLQ 14 может быть получен любым другим желательным образом.
В соответствии с первым предпочтительным вариантом осуществления настоящего изобретения блок MP-MLQ 14 включает в себя устройство 20 определения местоположения начального импульса, устройство 22 определения диапазона усиления, селектор уровня усиления 24, устройство 25 определения импульсной последовательности, обнаружитель совпадения вектора цели 28 и, опционно, кодирующее устройство 30. Конкретные операции, осуществляемые элементами 20 - 30, иллюстрируются на фиг. 2 и подробно описаны ниже. Далее следует описание работы блока 14.
На вход устройства 20 определения местоположения начального импульса по выходным линиям 17 и 26 поступают выходные сигналы генератора 13 вектора цели и кратковременного анализатора 10 соответственно. Устройство 20 производит определение местоположения в выборке первого импульса, в соответствии с техникой многоимпульсного анализа.
На вход устройства 22 определения диапазона усиления с выхода устройства 20 поступает первый импульс; устройство 20 производит определение как амплитуды первого импульса, так и диапазона квантованных уровней усиления в окрестности абсолютного значения найденной амплитуды. Размер шага, именуемый MLQ_STEPS, для перемещения через диапазон квантованных уровней усиления, обычно имеет значение 3 раздельных уровня усиления. Размер шага MLQ_STEPS не определяется блоком MP-MLQ 14.
На вход селектора уровня усиления 24 поступает диапазон усиления, выработанный устройством 22 определения диапазона усиления; устройство 24 производит перемещение внутри диапазона усиления и выбирает значения усиления. На его выходе на линии 32 получают текущий уровень усиления, для которого должна быть определена последовательность импульсов равной амплитуды.
На вход устройства 25 определения импульсной последовательности по линии 26 поступает вектор цели и по линии 32 текущий уровень усиления; устройство 25 получает из них с использованием техники многоимпульсного анализа, описанной ниже, импульсную последовательность (как с положительными, так и с отрицательными импульсами), которая совпадает с вектором цели. Импульсная последовательность представляет собой ряд положительных и отрицательных импульсов, которые имеют текущий уровень усиления.
На вход обнаружителя совпадения вектора цели 28 по выходной линии 34 поступает выходной сигнал импульсной последовательности устройства 25 и по выходной линии 26 вектор цели. Устройство 28 определяет качество совпадения с использованием критерия типа максимального правдоподобия. Так как имеется диапазон уровней усиления, то устройство 28 подает сигнал управления на селектор 24 уровня усиления для выбора следующего уровня усиления. Этот сигнал показан стрелкой 36. Для каждого значения усиления обнаружитель совпадения 28 определяет качество совпадения и сохраняет параметры совпадения (коэффициент усиления и импульсную последовательность) только в том случае, если обеспечивается меньшее значение критерия, чем при предыдущем совпадении.
После того как селектор усиления 24 осуществит перебор всех значений усиления, коэффициент усиления и импульсная последовательность, которые запомнены в обнаружителе совпадения 28, будут иметь ближайшее совпадение с вектором цели. После этого обнаружитель совпадения 28 передает запомненную импульсную последовательность и коэффициент усиления по выходной линии 38 на опционное кодирующее устройство 30. Следует иметь в виду, что путем определения импульсной последовательности для каждого из нескольких уровней усиления, MP-MLQ блок 14 может выбрать такую последовательность, которая наиболее близко совпадает с вектором цели.
Опционное кодирующее устройство 30 производит кодирование выходной импульсной последовательности и коэффициента усиления для хранения и передачи.
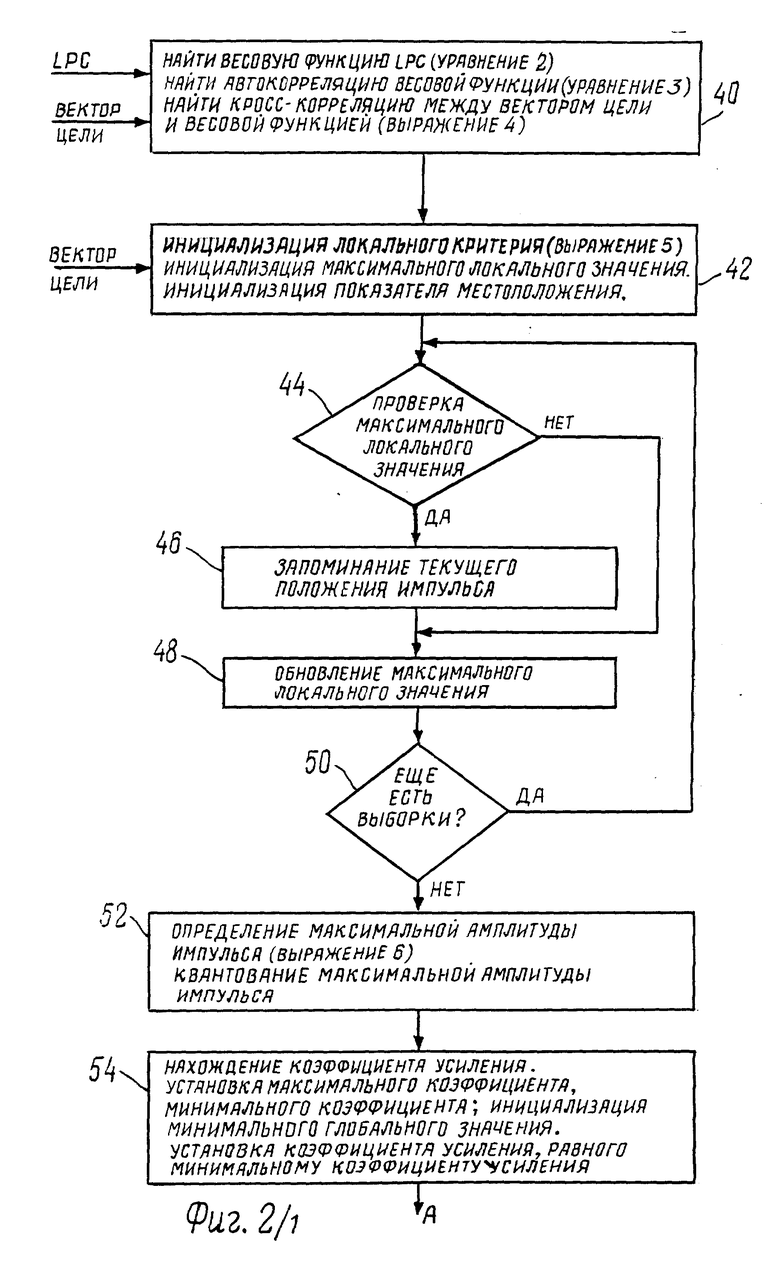
Конкретные операции MP-MLQ блока 14 отображены на фиг. 2. В шаге инициализации 40 блок 14 вырабатывает следующие сигналы:
а) весовая функция (импульсная характеристика) h[n] для входного кадра из кратковременных характеристик a-i, которая определена как
h[n] = Σa-i*h[n-i]+δ[n]; 0≤n≤N-1; 1≤i≤P; (2)
h[-n] = 0, n = 1...P,
где P представляет собой число кратковременных характеристик, а N представляет собой число выборок речевого сигнала в субкадре.
б) результат автокорреляции r-hh [l] весовой функции для каждого положения выборки в следующем виде:
r-hh[l] = Σh[n]*h[n-l]; 0≤l≤N-1; 1≤n≤N-1; (3)
в) результат кросс-корреляции r-th [l] между весовой функцией h [n] и вектором цели t[n] для каждого положения выборки в следующем виде:
r-th[l] = Σt[n]*h[n-l]; 0≤l≤N-1; 1≤n≤N-1. (4)
Следует иметь в виду, что весовая функция является функцией кратковременных характеристик a-i, которые поступают по линии 17 от анализатора 10. Весовая функция, которая вырабатывается при шаге инициализации 40, соответствует упомянутому выше анализу LPC Дурбина.
В MP-MLQ блоке 14 используется локальный критерий LC-kj[l] для определения величины квантования для каждого положения выборки l, каждого импульса k и каждого уровня усиления j. Как будет показано далее, уровень локального критерия зависит от значения к (то есть от числа уже определенных импульсов).
В шаге 42 локальный критерий LC-O, j[l] для определения характеристик первого импульса инициирован функцией кросс- корреляции r-th[l] в следующем виде:
LC-O[l] = LC-O, j[l] = r-th[l], 0 ≤ l ≤ N-1, j-min ≤ j ≤ j-max. (5)
Максимальное локальное значение локального критерия установлено также для некоторых отрицательных значений. Коэффициент положения l также инициирован для 0.
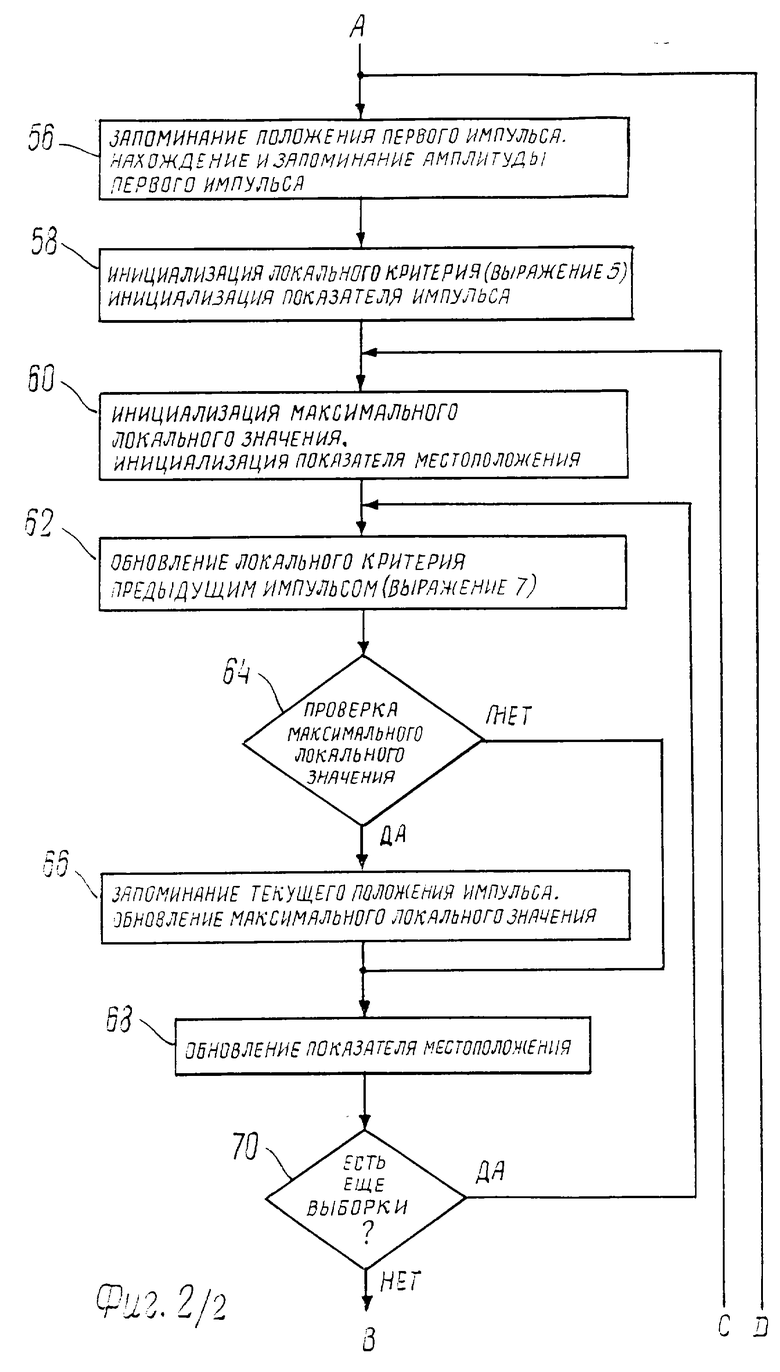
При осуществлении операций (шагов) 44 - 50 определяют положение первого импульса k = 1. Для этого абсолютное значение локального критерия LC-0, j[l] сравнивают с максимальным локальным значением (операция 44). Если LC-0, j[l] шире, то положение l занимают, максимальное локальное значение устанавливают равным абсолютной величине локального критерия LC-0, j[l] (шаг 46) и показатель положения l увеличивают на 1 (шаг 48). Операцию повторяют до тех пор, пока не будут просмотрены все положения l. Положение выборки l-opt, которое запомнено после просмотра всех положений, является выбранным положением выборки l-opt. Шаги 40 - 50 осуществляют при помощи устройства определения местоположения импульса 20.
Операцию 52 осуществляют при помощи устройства определения диапазона усиления 22. При проведении операции 52 максимальная амплитуда A-max положения l, при которой получают самый широкий локальный критерий LC-0, j[l], вырабатывается следующим образом:
A-max = A-max-j = |LC-0,j[l-opt]|/r-hh[0]; j-min ≤ j ≤ j-max, (6)
где l-opt - положение первого импульса.
Затем производят аппроксимацию максимального значения A-max при помощи одного из заданных наборов уровней усиления. Например, если ожидаемые уровни амплитуды лежат в диапазоне от 0,1 до 2,0 единиц, то уровни усиления могут идти через каждые 0,1 единицы. Так, например, если A-max = 0,756, то его округляют до 0,8.
Операции 54 - 58 осуществляют в селекторе усиления 24. При операции 54 селектор усиления 24 определяет как коэффициент усиления j, связанный с определенным уровнем усиления, так и диапазон показателей усиления в окрестности коэффициента усиления j. Диапазон уровней усиления может иметь любой размер, в зависимости от заданных значений MLQ-STEPS. При проведении операции 54 селектор усиления 24 устанавливает минимальное значение коэффициента усиления. Для предыдущего примера 0,1 может иметь показатель 1 и MLQ-STEPS может быть равен 3. При этом найденный коэффициент усиления равен 8, а диапазон соответствует 5 - 11. При проведении операции 54 также устанавливают минимальное глобальное значение для любого очень большого значения, например, такого как 1013.
В соответствии с настоящим изобретением для каждого коэффициента усиления первый импульс имеет местоположение, определенное устройством определения местоположения импульса 20 (в шагах 44 - 50). Остальные импульсы могут быть расположены в любом месте внутри субкадра; они могут иметь как положительные, так и отрицательные значения усиления. При проведении операции 56 селектор усиления 24 запоминает положение первого импульса и его амплитуду. При проведении операции 58 производят инициализацию локального критерия LC-k, j[l] для текущего показателя k импульса и коэффициента усиления j, обычно в соответствии с уравнением 5.
Устройство определения импульсной последовательности 25 осуществляет операции 60 - 74. При проведении операции 60 устройство 25 устанавливает максимальное локальное значение, равное самому большому значению, как это было сделано ранее, и устанавливает коэффициент положения 1 на 0.
При проведении операции 62 устройство 25 обновляет локальный критерий при использовании информации предыдущего импульса следующим образом:
LC-k, j[l] = LC-k-l, j[l] - A-k-l, j*r-hh[l-l-opt-k-l, j], (7)
где
j - коэффициент усиления;
k - показатель импульса;
l - показатель положения.
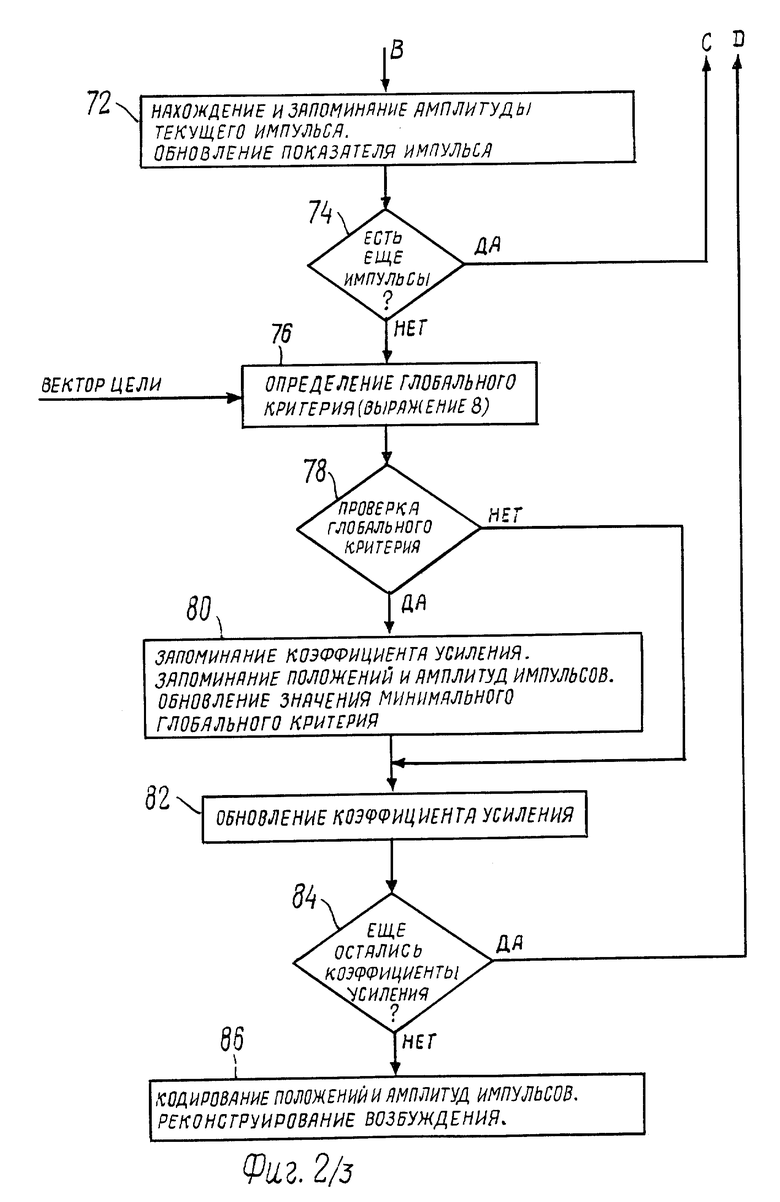
При проведении совокупности операций 64 - 70 устройство определения импульсной последовательности 25 производит определение местоположения импульса аналогично тому, как это было сделано при проведении операций 44 - 50 (поэтому здесь не приводится дополнительное объяснение работы устройства). При проведении операции 72 устройство определения импульсной последовательности 25 запоминает выбранный импульс, а при проведении операции 74 обновляет значение импульса. Операции 62 - 74 повторяют для каждого импульса в последовательности, в результате чего получают на выходе устройства 25 выходную импульсную последовательность. Следует иметь в виду, что при проведении операции 62 обновляется локальный критерий для каждого найденного импульса.
На фиг. 3A и 3B показаны два примера различных импульсных последовательностей на выходе устройства 25. Показанная на фиг. 3A последовательность имеет коэффициент усиления 7, а показанная на фиг. 3B последовательность имеет коэффициент усиления 8. Обе последовательности имеют одинаковое положение первой выборки 10, однако остальные импульсы имеют различные положения. Следует иметь в виду, что импульсы могут быть положительными или отрицательными.
При проведении операции 76 обнаружитель совпадения вектора цели 28 определяет величину глобального критерия GC-j для каждого уровня усиления j. В качестве глобального критерия GC-j может быть использован любой подходящий критерий; обычно используется критерий типа максимального правдоподобия. Например, глобальный критерий может измерять энергию в векторе ошибки, который определен как различие между вектором цели и ожидаемым вектором, полученным фильтрацией импульсной последовательности единичного усиления при помощи распознающего фильтра со взвешиванием, который в данном случае определен кратковременными характеристиками. В случае такого критерия обнаружитель совпадения вектора цели 28 включает в себя распознающий фильтр со взвешиванием.
Следует иметь в виду, что сама по себе импульсная последовательность не совпадает с вектором цели; импульсная последовательность отображает функцию, которая совпадает с вектором цели.
Как это показано в выражениях 8a - 8e, приведенных ниже, глобальный критерий GC-j включает в себя два элемента, а именно, p-j и d-j, которые оба являются функциями сигнала x-j [n], который представляет собой серии импульсов для уровня усиления j, отфильтрованные кратковременной весовой функцией h[n]. Что касается p-j, то этот элемент представляет собой кросс-корреляцию между вектором цели t[n] и x[n], а элемент d-j представляет собой энергию x-j[n].
GC - j = -2p-j + d - j; (8a)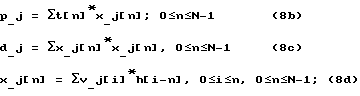
v-j[n] = A-k,j для n = l-opt-k,j, 0 ≤ k ≤ K - 1,0 ≤ n ≤ N - 1 (8e)
0 в других случаях.
При проведении операции 78 глобальный критерий GC-j для текущего коэффициента усиления j сравнивается с текущим минимальным глобальным значением. Если он меньше минимального текущего глобального значения, что проверяется при операции 78, то обнаружитель совпадения вектора цели 28 запоминает (операция 80) коэффициент усиления и объединенную с ним импульсную последовательность.
При проведении операции 82 селектор уровня усиления 24 обновляет коэффициент усиления и при проведении операции 84 проверяет, определены ли импульсные последовательности для всех уровней усиления. Если это так, то запомненные импульсная последовательность и коэффициент усиления являются теми, которые наилучшим образом совпадают с вектором цели в соответствии с глобальным критерием GX-j.
При проведении 86 опционное кодирующее устройство 30 производит кодирование в соответствии с любым подходящим способом кодирования, импульсной последовательности и коэффициента усиления, которые в качестве выходных сигналов используются для последующей передачи или хранения. Если есть такое желание, то вектор цели может быть восстановлен (реконструирован) с использованием x-j[n] , где opt представляет собой коэффициент усиления, полученный при операции 84.
Следует иметь в виду, что MP - MLQ блок 14 в соответствии с настоящим изобретением вырабатывает в качестве выходных сигналов по меньшей мере выбранную импульсную последовательность и уровень усиления.
Обратимся теперь к рассмотрению фиг. 4A, 4B, 5 и 6, на которых показан альтернативный вариант осуществления настоящего изобретения, в котором используются пачки импульсов. Пачка импульсов 83 показана на фиг. 4A. Она содержит серии импульсов 81, разделенных расстоянием Q, которое является основным тоном.
В системе, показанной на фиг. 5, находят последовательность пачек импульсов, которая наиболее близко совпадает с вектором цели. На фиг. 4B показан пример последовательности трех пачек импульсов 83a, 83b и 83c, которая может быть найдена. Каждая пачка импульсов 83 начинается с различного положения выборки. Пачка импульсов 83a является первой и содержит четыре импульса. Пачка импульсов 83b начинается позже и содержит три импульса, а пачка импульсов 83c, которая начинается еще позже, содержит два импульса.
Показанная на фиг. 5 система аналогична системе, показанной на фиг. 1; различия заключаются в следующем: а) устройство определения местоположения импульса 20 и устройство определения импульсной последовательности 25 фиг. 1 заменены устройством определения положения пачки импульсов 88 и устройством определения последовательности пачки импульсов 89; б) обнаружитель совпадения вектора цели 90 работает скорее с последовательностями пачек импульсов, а не с импульсными последовательностями; и в) устройства принятия решений (детерминаторы) 88 и 89 получают по выходной линии 18 значение основного тона Q. Кроме того, выходные линии 34 и 38 заменены выходными линиями 92 и 94, по которым идут сигналы, отображающие скорее последовательности пачек импульсов, чем импульсные последовательности.
Детерминатор пачки импульсов 88 работает аналогично устройству 20, за исключением того, что детерминатор 88 использует весовую функцию пачки импульсов h-T[n], а не весовую функцию импульса h[n]. Функция h-T[n] может быть определена следующим образом:
h-T[n] = Σh[n-k-Q], 0≤n≤N-1, 0≤k≤(N-1)/Q, (9)
где Q представляет собой значение основного тона.
Как можно заметить, пачки импульсов в последних местоположениях обычно имеют меньше импульсов.
Автокорреляция выражения (3) весовой функции пачки импульсов дает
r-hh[l] = Σh-T[n]*h-T[n-l], 0≤l≤N-1,1≤n≤N-1.(10)
Кросс-корреляция r-th[l] между весовой функцией h-T[n] и вектором цели t[n] для каждого положения выборки l дает
r-th[l] = Σt[n]*h-T[n], 0≤l≤N-1, 1≤n≤N-1. (11)
Детерминатор последовательности пачек импульсов 89 работает аналогично устройству 25, однако детерминатор 89 вырабатывает последовательности пaчек импульсов.
Обнаружитель совпадения вектора цели 90 работает аналогично обнаружителю совпадения вектора цели 28; однако в обнаружителе совпадения 90 используется весовая функция пачки импульсов h-T[n], а не h[n]. При этом выражение 8d будет выглядеть следующим образом:
x-j[n] = Σv-j[i]*h-T[i-n], 0≤i≤n, 0≤n≤N-1. (12)
Конкретные операции блока 86 многоимпульсного анализа пачек импульсов описаны со ссылкой на фиг. 6. Эти операции эквивалентны операциям, отображенным на фиг. 2; однако операции производятся скорее над пачками импульсов, а не над индивидуальными импульсами. Так, например, в выражении (9) находят весовую функцию пачки импульсов h-T[n] , которая содержит импульсы через каждый Q шагов. Пачки импульсов в более поздних положениях обычно содержит меньше импульсов.
Остальные выражения аналогичны за тем исключением, что они оперируют с весовой функцией h-T[n].
Если есть такое желание, то диапазон усиления, который определен устройство определения диапазона усиления 22, можно иметь только один коэффициент усиления. При таком варианте блок 86 многоимпульсного анализа пачек импульсов находит последовательность пачек импульсов, которая имеет уровень усиления первой последовательности пачек импульсов. При таком варианте обнаружитель совпадения вектора цели 90 не работает, причем нет никакого повторения операций селектора уровня усиления 24 и детерминатора последовательности пачек импульсов 89.
Следует также иметь в виду, что выходные сигналы обнаружителей совпадения вектора цели 28 и 90 могут быть сравнены. Это иллюстрируется фиг. 7, на которой выходные сигналы обнаружителей совпадения вектора цели 28 и 90, которые отображают последовательности и глобальные критерии, поступают по выходным линиям 38 и 94 на компаратор 100. Компаратор 100 производит сравнение глобальных критериев GC-j opt обнаружителей совпадения 28 и 90 и выбирает меньший из них. Выходной сигнал, который отображает результирующую последовательность, импульс или пачку импульсов, получают на выходной линии 102.
Следует иметь в виду, что показанные на фиг. 1, 5 и 7 системы могут быть реализованы в виде микросхемы цифровой обработки сигнала либо в виде программы. В соответствии с одним из вариантов при программировании используется язык программирования C++, а при другом варианте используется язык Ассемблер.
Несмотря на то что был описан предпочтительный вариант осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят, однако, за рамки приведенной далее формулы изобретения.
В изобретении раскрыты как система, так и способ обработки речевого сигнала. В соответствии с одним из вариантов осуществления настоящего изобретения система включает в себя по меньшей мере один блок многоимпульсного анализа с квантованием с использованием критерия максимального правдоподобия (MLQ), который работает с вектором цели. Блок MLQ многоимпульсного анализа обычно определяет уровень начального усиления для многоимпульсной последовательности и производит многоимпульсный анализ (MPA) с единичным усилением несколько раз, всякий раз с различным уровнем усилением. На выходе получают импульсную последовательность, которая наиболее точно отображает вектор цели. В соответствии с другим из вариантов осуществления настоящего изобретения система включает в себя по меньшей мере один блок многоимпульсного анализа пачек импульсов, в котором вектор цели моделируется сериями пачек импульсов. Каждая пачка импульсов содержит множество импульсов одинакового знака, причем каждый импульс занимает положение, которое смещено от предыдущего импульса в пачке на значение основного тона. Частью настоящего изобретения являются также комбинации анализа пачек импульсов с использованием критерия максимального правдоподобия. Технический результат заключается в повышении точности отображения функции, которая совпадает с вектором цели. 8 с. и 9 з.п. ф-лы, 7 ил.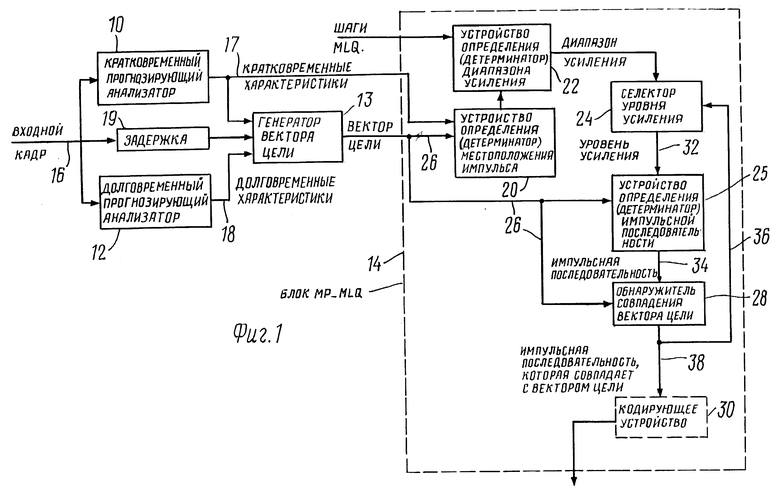
начальной пачки импульсов, так и диапазона квантованных уровней амплитуды, сгруппированных вокруг абсолютного значения указанной амплитуды; селектор уровня амплитуды для пошагового прохождения указанного диапазона квантованных ровней амплитуды в соответствии с заданной величиной шага, причем на выходе селектора уровня амплитуды получают выбранную квантованную амплитуду для каждого шага; устройство определения последовательности пачек импульсов для выработки для каждой из выбранных квантованных амплитуд множества пачек импульсов переменного знака и равной амплитуды с равномерным размещением импульсов, которые соответствуют указанному вектору цели, причем внутри каждой пачки расположение импульсов соответствует значению основного тона, при этом импульсы внутри каждой пачки имеют одинаковый знак, а импульсы всех пачек имеют одинаковую амплитуду, причем указанная одинаковая амплитуда соответствует указанной выбранной квантованной амплитуде; и обнаружитель совпадения вектора цели для нахождения вектора ошибки, который соответствует качеству совпадения между указанным множеством последовательностей пачек импульсов равной амплитуды и разного знака, имеющих равномерное расположение, и указанным вектором цели, причем указанный вектор ошибки находят для каждой выбранной квантованной амплитуды, а на выходе обнаружителя совпадения вектора цели получают указанную последовательность пачек импульсов равной амплитуды и разного знака, имеющих равномерное расположение, которая соответствует минимальному вектору ошибки.
пачек импульсов равной амплитуды и разного знака, имеющих равномерное размещение, и устройство определения количества энергии в указанном векторе ошибки для каждой из указанных выбранных квантованных амплитуд, при этом указанный вектор ошибки определен как различие между указанным вектором цели и выходом указанного фильтра, причем указанный распознающий фильтр со взвешиванием имеет характеристики, соответствующие кратковременным характеристикам.
| US 4890327A (ITTCOPP), 26.12.89 | |||
| US 4472832A (AT&BELLCOPP), 18.09.84 | |||
| US 4716592A (NEC.CORP) 29.12.87 | |||
| ВСТАВКА ДЛЯ ПОРОДОРАЗРУШАЮЩЕГО ИНСТРУМЕНТА | 2001 |
|
RU2200819C2 |
| ПОДДЕРЖКА УСОВЕРШЕНСТВОВАННОГО КОНФИГУРИРОВАНИЯ ПРОМЕЖУТКА ИЗМЕРЕНИЯ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2011 |
|
RU2579356C2 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ анализа и синтеза речи и устройство для его осуществления | 1986 |
|
SU1316030A1 |
| акад | |||
| Н.Н.Андреева), 07.06.87. | |||
