Изобретение относится к области радиолокации и радионавигации, в частности к системам определения местоположения движущихся объектов.
Известна система непрерывного установления и отображения местоположения подвижных объектов [1], содержащая передатчик радиосигналов, расположенный на подвижном объекте, который на заданной частоте периодически излучает сигналы, соответствующие индивидуальному коду объекта. На местности в фиксированных точках расположено несколько ретрансляционных станций, в состав каждой из которых входят приемник радиосигналов, блок, определяющий код объекта, и блок, определяющий интенсивность принятого радиосигнала. Вычислительный блок, связанный с выходами всех блоков ретрансляционных станций, по величинам интенсивности поступающих на различные станции радиосигналов определяет местоположение подвижного объекта. Недостатками данной системы являются низкая помехоустойчивость и значительные методические погрешности при расчете параметров положения объекта, что определяется характером непосредственно измеряемой величины - интенсивности радиосигнала.
Наиболее близкой к описываемому изобретению является гидроакустическая система обеспечения швартовки судов - швартовочный гидролокатор SPD-101 (фирма "Koden Electronics Co, Ltd", Япония [2]), содержащий два реперных пункта, расположенных на линии причала, в состав каждого из которых входят: передатчик акустического сигнала, формирователь акустического сигнала, приемник акустического сигнала, ключевая схема, блоки измерения дальности и измерения скорости. Выходы блоков измерения дальности и скорости каждого из реперных пунктов соединены с общим вычислительным блоком, обрабатывающим данные, поступающие от измерителей. В данной системе дальности до движущегося надводного объекта определяется временем, затрачиваемым на прохождение акустического сигнала от передатчика до объекта швартовки и отраженного от него сигнала - обратно к приемнику. По значениям дальностей от двух реперных точек до объекта вычислительный блок определяет местоположение объекта.
Недостатками данной системы являются:
- недостаточное быстродействие, обуславливаемое использованием гидроакустического канала с малой скоростью распространения сигналов для передачи сигналов как от реперных пунктов на линии причала к надводному объекту, так и в обратном направлении;
- невысокая точность измерения дальности в связи с тем, что пассивно переотраженный сигнал, поступающий от объекта к реперному пункту на линии причала, обладает низкой помехоустойчивостью при обработке и малой помехозащищенностью от реверберационных помех и кавитационных эффектов, присущих гидроакустическому каналу;
- невозможность использования параметров, получаемых в вычислительном блоке, расположенном на линии причаливания, в управлении процессом причаливания на самом надводном объекте;
- ограничение на минимальную дальность работы системы, возникающее из-за низкого быстродействия;
- ограниченный состав параметров причаливания, характеризующих взаимное положение причала и швартуемого объекта: определяются только дальность от объекта до реперных точек и скорость движения объекта относительно реперных точек.
Технической задачей, решаемой изобретением, является:
- повышение быстродействия определения параметров причаливания;
- повышение точности измерения дальности между реперными пунктами на объекте и на линии причала;
- использование полученных параметров причаливания в управлении процессом швартовки на борту надводного объекта;
- снижение минимальной дальности действия системы;
- расширение состава параметров причаливания путем расчета на основе измеренных дальностей дополнительных параметров: угла причаливания, нормальных составляющих дальностей от реперных пунктов базы причаливаемого объекта до линии причала, координат геометрического центра базы объекта причаливания.
Поставленная техническая задача решается за счет того, что в устройство, содержащее
последовательно соединенные и расположенные на первом реперном пункте опорной базы причаливания первый формирователь акустического сигнала и первый передатчик акустического сигнала,
последовательно соединенные и расположенные на втором реперном пункте опорной базы причаливания второй формирователь акустического сигнала и второй передатчик акустического сигнала,
первый и второй измерители дальности, выходы которых соединены с соответствующими входами вычислителя, выход которого связан со входом блока индикации,
первый и второй приемники акустического сигнала,
введены
последовательно соединенные и установленные на первом реперном пункте опорной базы причаливания первый приемник радиосигнала и первый дешифратор, выход которого соединен со входом первого формирователя акустического сигнала,
последовательно соединенные и установленные на втором реперном пункте опорной базы причаливания второй приемник радиосигнала и второй дешифратор, выход которого соединен со входом второго формирователя акустического сигнала,
последовательно соединенные и расположенные на объекте причаливания формирователь радиосигналов и передатчик радиосигналов, причем
первый вход первого измерителя дальности соединен с выходом первого приемника акустического сигнала, а второй - с выходом формирователя радиосигналов,
первый вход второго измерителя дальности соединен с выходом второго приемника акустического сигнала, а второй - с выходом формирователя радиосигналов,
вход формирователя радиосигналов соединен с выходами первого и второго приемников акустического сигнала,
первый и второй измерители дальности, вычислитель и блок индикации расположены на объекте причаливания,
первый и второй приемники акустического сигнала расположены соответственно на первом и втором реперных пунктах базы объекта причаливания.
Кроме того, вычислитель содержит процессор, интерфейс для связи с блоком индикации, запоминающее устройство команд и запоминающее устройство данных, соединенные посредством общей шины, причем выход интерфейса для связи с блоком индикации является выходом вычислителя, а входные сигналы вычислителя подаются на общую шину;
измерители дальности содержат последовательно соединенные генератор тактовых импульсов и счетчик, причем входы счетчиков являются входами измерителей, а выходы счетчиков являются выходами измерителей;
формирователь радиосигналов содержит триггер, выход которого подсоединен ко входу цифроаналогового преобразователя, причем вход триггера является входом формирователя радиосигналов, выход цифроаналогового преобразователя является выходом формирователя радиосигналов, а выход триггера соединен с соответствующими входами измерителей дальности.
Положительный эффект получается за счет того, что гидроакустический канал с пассивно переотражаемым акустическим сигналом заменяется активным радиоканалом; переотраженный объектом причаливания сигнал заменяется активно формируемым на объекте причаливания запросным сигналом; приемники ответного сигнала располагаются на двух реперных пунктах причаливаемого объекта; измерители дальности, вычислитель параметров и блок индикации располагаются на объекте причаливания.
На фигуре 1 приведена структурная схема системы причаливания.
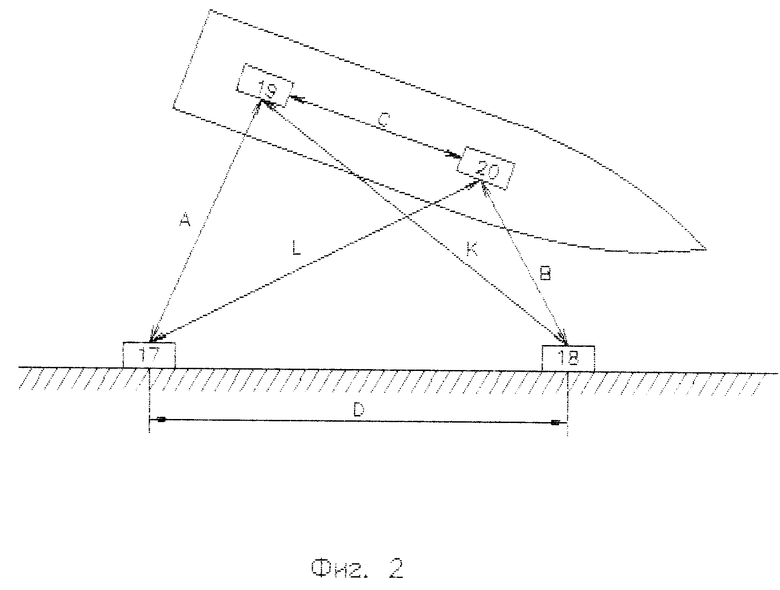
На фигуре 2 приведена схема пространственного расположения реперных пунктов.
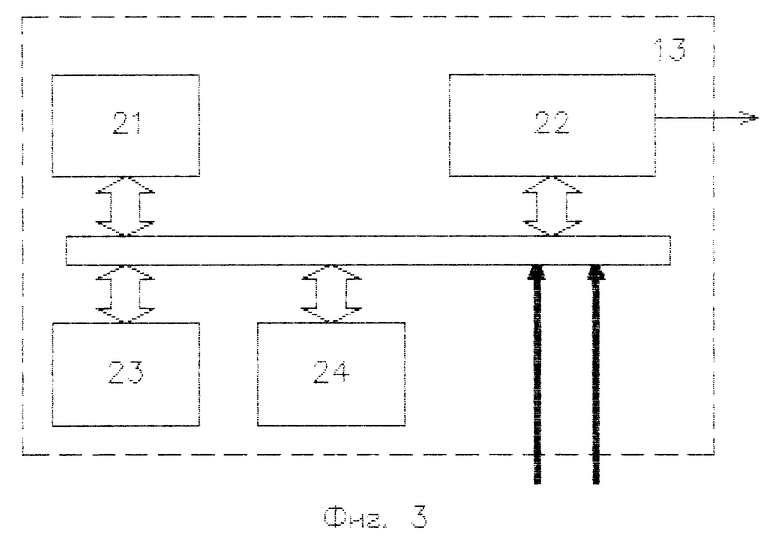
На фигуре 3 приведена структурная схема вычислителя.
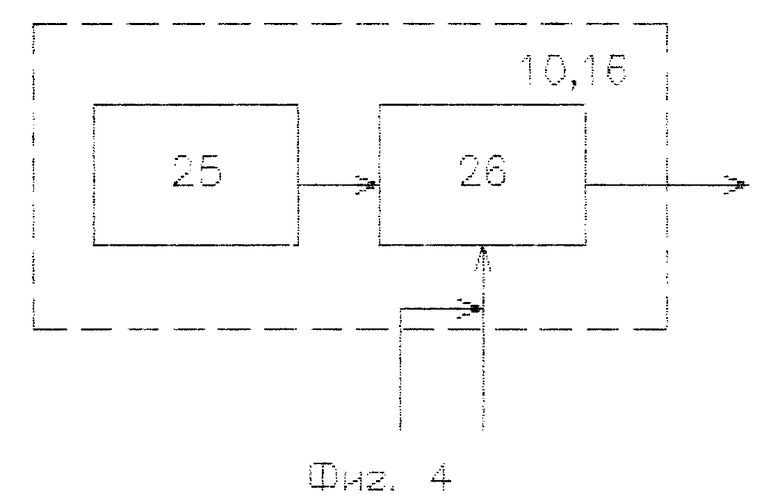
На фигуре 4 приведена структурная схема первого (второго) измерителя дальности.
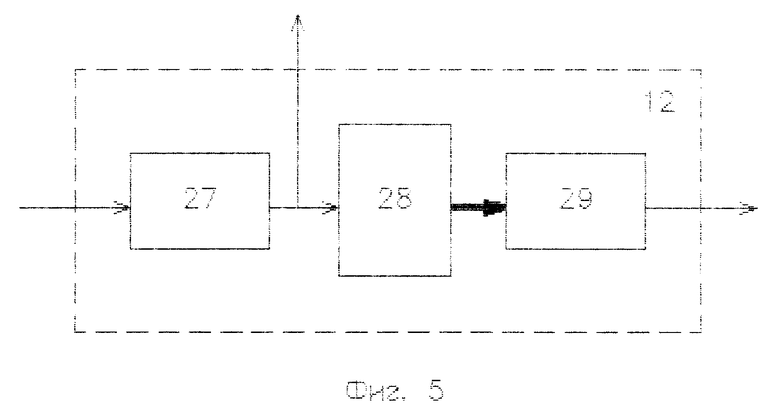
На фигуре 5 приведена структурная схема формирователя радиосигналов.
На фиг. 1, 2, 3, 4, 5 приняты следующие обозначения:
1 - первый приемник радиосигнала.
2 - первый дешифратор.
3 - первый формирователь акустического сигнала.
4 - первый передатчик акустического сигнала.
5 - второй приемник радиосигнала.
6 - второй дешифратор.
7 - второй формирователь акустического сигнала.
8 - второй передатчик акустического сигнала.
9 - первый приемник акустического сигнала.
10 - первый измеритель дальности.
11 - передатчик радиосигналов.
12 - формирователь радиосигналов.
13 - вычислитель.
14 - блок индикации.
15 - второй приемник акустического сигнала.
16 - второй измеритель дальности.
17 - первый реперный пункт опорной базы причаливания.
18 - второй реперный пункт опорной базы причаливания.
19 - первый реперный пункт базы объекта причаливания.
20 - второй реперный пункт базы объекта причаливания.
21 - процессор.
22 - интерфейс для связи с блоком индикации.
23 - запоминающее устройство команд.
24 - запоминающее устройство данных.
25 - генератор тактовых импульсов.
26 - счетчик.
27 - триггер.
28 - мультиплексор.
29 - цифроаналоговый преобразователь.
A - расстояние между первым реперным пунктом базы объекта причаливания и первым реперным пунктом опорной базы причаливания.
B - расстояние между вторым реперным пунктом базы объекта причаливания и вторым реперным пунктом опорной базы причаливания.
C - длина базы объекта причаливания (расстояние между первым и вторым реперными пунктами базы объекта причаливания).
D - длина опорной базы причаливания (расстояние между первым и вторым реперными пунктами опорной базы причаливания).
K - расстояние между первым реперным пунктом базы объекта причаливания и вторым реперным пунктом опорной базы причаливания.
L - расстояние между вторым реперным пунктом базы объекта причаливания и первым реперным пунктом опорной базы причаливания.
Система причаливания надводных объектов содержит последовательно соединенные и расположенные на первом реперном пункте опорной базы причаливания (17) первый формирователь акустического сигнала (3) и первый передатчик акустического сигнала (4), последовательно соединенные и расположенные на втором реперном пункте опорной базы причаливания (18) второй формирователь акустического сигнала (7) и второй передатчик акустического сигнала (8);
первый измеритель дальности (10) и второй измеритель дальности (16), выходы которых соединены с соответствующими входами вычислителя (13), выход которого связан со входом блока индикации (14);
первый приемник акустического сигнала (9) и второй приемник акустического сигнала (15);
последовательно соединенные и установленные на первом реперном пункте опорной базы причаливания (17) первый приемник радиосигнала (1) и первый дешифратор (2), выход которого соединен со входом первого формирователя акустического сигнала (3);
последовательно соединенные и установленные на втором реперном пункте опорной базы причаливания (18) второй приемник радиосигнала (5) и второй дешифратор (6), выход которого соединен со входом второго формирователя акустического сигнала (7);
последовательно соединенные и расположенные на объекте причаливания формирователь радиосигналов (12) и передатчик радиосигналов (11), причем первый вход первого измерителя дальности (10) соединен с выходом первого приемника акустического сигнала (9), а второй - с выходом формирователя радиосигналов (12), первый вход второго измерителя дальности (16) соединен с выходом второго приемника акустического сигнала (15), а второй - с выходом формирователя радиосигналов (12);
вход формирователя радиосигналов (12) соединен с выходами первого приемника акустического сигнала (9) и второго приемника акустического сигнала(15);
первый измеритель дальности (10), второй измеритель дальности (16), вычислитель (13) и блок индикации (14) расположены на объекте причаливания;
первый приемник акустического сигнала (9) и второй приемник акустического сигнала (15) расположены соответственно на первом реперном пункте базы объекта причаливания (19) и на втором реперном пункте базы объекта причаливания (20);
вычислитель (13) содержит процессор (21), интерфейс для связи с блоком индикации (22), запоминающее устройство команд (23) и запоминающее устройство данных (24), соединенные посредством общей шины, которая включает в себя входы вычислителя, а выходом вычислителя является выход интерфейса для связи с блоком индикации;
первый измеритель дальности (10) и второй измеритель дальности (16) выполнены в виде последовательно соединенных генератора тактовых импульсов (25) и счетчика (26); входы счетчика являются входами измерителя дальности, а выход счетчика - выходом измерителя дальности;
формирователь радиосигналов (12) содержит последовательно соединенные триггер (27), мультиплексор (28) и цифроаналоговый преобразователь (29); вход триггера является входом формирователя радиосигналов, выход цифроаналогового преобразователя является выходом формирователя радиосигналов, а выход триггера соединяется с соответствующими входами измерителей дальности (10, 16).
Работа системы причаливания организована следующим образом: расположенный на объекте причаливания формирователь радиосигналов (12) вырабатывает два вида различающихся по амплитуде запросных радиосигнала - f1 и f2, каждый из которых адресован соответственно первому либо второму реперному пункту опорной базы причаливания. Допустим, в некоторый момент времени на выходе формирователя радиосигналов (12) установлен первый сигнал U1, который поступает на передатчик радиосигналов (11) и вызывает излучение в воздушный радиоканал радиосигнала с амплитудой f1, который достигает приемников радиосигналов (1) и (5) первого и второго реперных пунктов опорной базы причаливания соответственно за время:
t1 = A/Vr,
t2 = K/Vr,
где
Vr - скорость распространения радиосигналов.
Одновременно с выработкой сигнала f1 с выхода триггера (27) на входы счетчиков (26) измерителей дальности (10) и (16) поступает сигнал, устанавливающий в 0 данные, хранящиеся в счетчиках, и разрешающий счет импульсов, поступающих от генераторов тактовых импульсов (25) за время прохождения сигналов от объекта причаливания до опорной базы и обратно.
Запросный сигнал с амплитудой f1, поступающий на приемники радиосигналов (1) и (5), расположенные на реперных пунктах (17) и (18) опорной базы причаливания на расстоянии D друг от друга, анализируется затем связанными с выходами радиоприемников (1) и (5) дешифраторами радиосигналов (2) и (6). Реперный пункт опорной базы причаливания, к которому обращен запросный сигнал, выбирается при совпадении хранящегося в дешифраторе значения амплитуды сигнала с амплитудой поступившего на приемник запросного сигнала. Сигнал с амплитудой f1 проходит через дешифратор радиосигналов (2) первого реперного пункта опорной базы причаливания (17), после чего вырабатывается сигнал, инициирующий работу формирователя акустического сигнала (3) и выдачу в гидроакустический канал акустическим передатчиком (4) ответного сигнала f3. Сигнал с амплитудой f2 проходит через дешифратор радиосигналов (6) второго реперного пункта опорной базы причаливания (18), в результате чего вырабатывается сигнал, инициирующий работу формирователя акустического сигнала (7) и выдачу в гидроакустический канал акустическим передатчиком (8) ответного сигнала f4.
Ответный акустический сигнал f3 поступает в гидроакустический канал и далее, через интервал времени t3, пропорциональный расстоянию между реперным пунктом (17) опорной базы причаливания и ближайшим к нему реперным пунктом базы объекта причаливания - на приемник акустического сигнала этого реперного пункта. При поступлении сигнала f3 на этот приемник на первый вход соответствующего измерителя дальности подается сигнал, прекращающий поступление на счетчик (26) тактовых импульсов от генератора (25), после чего зафиксированное в счетчике количество тактовых импульсов, соответствующее времени прохождения запросного радиосигнала и ответного акустического сигнала, передается в вычислитель (13).
Тот же ответный акустический сигнал f3 через интервал времени t4 после излучения поступает на более удаленный от реперного пункта (17) опорной базы причаливания реперный пункт базы объекта причаливания. При поступлении сигнала f3 на приемник этого реперного пункта на первый вход соответствующего измерителя дальности поступает сигнал, прекращающий работу его счетчика (26), и измеренное значение времени t4 передается в вычислитель (13).
Таким образом, после прихода сигнала f3 на оба приемника акустического сигнала (9) и (15) могут быть определены значения дальностей от реперных пунктов (19) и (20) базы объекта причаливания до реперного пункта (17) опорной базы причаливания - A и L. Допустим, A < L. В этом случае время TA, затраченное на обмен сигналами между реперными пунктами (17) и (19), можно определить как
TA = t1 + tар+t3,
или ,
,
где
tар - время срабатывания аппаратуры,
Va - скорость распространения сигналов в акустическом канале.
Соответственно, расстояние между первым реперным пунктом опорной базы причаливания (17) и первым реперным пунктом базы объекта причаливания (19) можно определить как
Аналогично для дальности L между первым реперным пунктом опорной базы причаливания (17) и вторым реперным пунктом базы объекта причаливания (20):
TL = t1 + tар + t4
При использовании для измерения дальности лишь акустического канала для передачи как запросного, так и ответного сигналов, время TA 1, затраченное на обмен сигналами между реперными пунктами (17) и (19), можно записать как:
то есть выигрыш во времени при использовании радиоканала для передачи запросного сигнала при пренебрежении времени срабатывания аппаратуры и с учетом того, что Vr ≈ 105 Va, можно определить следующим образом:
При взаимном сближении опорной базы причаливания и причаливаемого объекта данный выигрыш во времени обмена сигналами позволяет осуществлять измерения дальностей между реперными пунктами, значения которых также примерно вдвое меньше, нежели у известной системы швартовки [2].
Акустический сигнал, излученный реперным пунктом, рассеивается в гидроакустическом канале, в результате чего возникают потери при распространении, что привносит основную погрешность при измерении акустического сигнала. Если же ответный сигнал является переизлученным, как в известной системе [2] , потери при распространении сигнала возрастают вдвое. Кроме того, акустическому каналу, в отличие от радиоканала, свойственны значительная изменчивость параметров и высокий уровень шумов [10]. В заявляемой системе причаливания акустический канал используется только для передачи активного, а не переизлученного ответного сигнала, так что относительно известной системы [2] снижаются как потери при распространении сигналов, так и уровень помех, что повышает точность измерения дальности.
После поступления ответного акустического сигнала f3 на оба приемника акустических сигналов (9) и (15) триггер (27) формирователя радиосигналов (12) переключается и мультиплексор (28) выставляет на выходе код другого радиосигнала, который проходит через цифроаналоговый преобразователь (29) и на выходе формирователя радиосигналов (12) образуется сигнал U2, который поступает на передатчик радиосигналов (1) и вызывает излучение в радиоканал радиосигнала с амплитудой f2, адресованного второму реперному пункту (18) опорной базы причаливания.
Одновременно происходит обнуление счетчиков (26) измерителей дальности (10) и (16) и запуск счета импульсов, поступающих с генератора тактовых импульсов (25) за время прохождения сигналов. Запросный радиосигнал с амплитудой f2, поступивший через время t2 на приемники радиосигнала (1) и (5), расположенные в реперных пунктах (17) и (18) опорной базы причаливания, приходит на дешифраторы (2) и (6), которые определяют реперный пункт, которому адресован сигнал. Запросный радиосигнал f2 проходит через дешифратор (6) второго реперного пункта (18) опорной базы причаливания и инициирует работу его формирователя акустического сигнала (7), в результате чего акустический передатчик (8) выдает в гидроакустический канал ответный сигнал f4.
Сигнал f4 через интервалы времени t5 и t6 поступает на приемники акустических сигналов (9) и (15), расположенные на реперных пунктах (19) и (20) базы объекта причаливания, в результате чего, как и в случае с сигналом f3, при поступлении сигнала f4 на каждый из приемников акустических сигналов на первый вход соответствующего измерителя дальности выдается сигнал, останавливающий счет тактовых импульсов и передающий измеренное значение t5 или t6 в вычислитель (13). С приходом сигнала f4 на оба приемника (9) и (15) могут быть рассчитаны значения дальностей от реперного пункта (18) опорной базы причаливания до реперных пунктов (19) и (20) базы объекта причаливания - B и K. Расчетные зависимости, как и в случае для A и L, имеют вид:
TB = t2 + tар + t5
TK = t2 + tар + t6
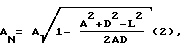
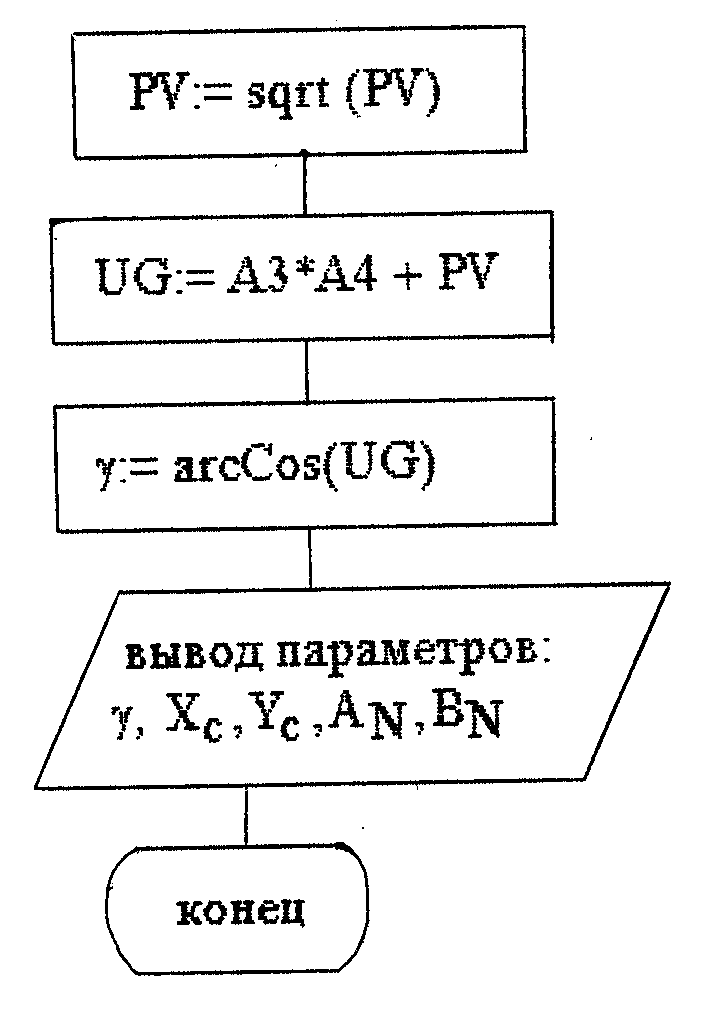
Данные, полученные в результате такой последовательности действий - величины A, B, K и L, поступают в запоминающее устройство данных (24) вычислителя (13), после чего под действием программы, записанной в запоминающем устройстве команд (23), обрабатываются в процессоре (21). На основании измеренных величин дальностей между реперными пунктами объекта причаливания и опорной базы причаливания может быть рассчитан ряд параметров причаливания - угол причаливания γ, положение геометрического центра базы объекта причаливания (Xc, Yc), нормальные составляющие дальностей от реперных пунктов базы объекта причаливания (19) и (20) до линии причала:
После поступления сигнала f4 на оба приемника акустических сигналов (9) и (15) триггер (27) формирователя радиосигналов (12) снова переключается, на мультиплексоре (28) выставляется код первого из запросных сигналов, который, проходя через цифроаналоговый преобразователь (29), инициирует выдачу передатчиком радиосигналов (11) радиосигнала f1, то есть начинается следующий цикл измерений и могут быть определены очередные значения времени обмена сигналами между реперными пунктами T
VA= (Ai-A)/T
VB= (Bi-B)/T
VK= (Ki-K)/T
VL= (Li-L)/T
Результаты вычислений - требуемые параметры причаливания - могут быть выведены из запоминающего устройства данных (24) через интерфейс для связи с блоком индикации (22) на блок индикации (14), расположенный на объекте причаливания. Хранение информации о параметрах причаливания в вычислителе (13), расположенном на объекте причаливания, дает возможность использования полученных параметров причаливания в управлении процессом причаливания на борту надводного объекта.
Приемник радиосигналов (1 и 5) может быть рассмотрен на примере описания и структурной схемы приемника радиосигналов, приведенной в [3], стр. 298. В качестве дешифраторов (2 и 6) радиосигналов в данном случае могут быть использованы схемы сравнения уровня сигналов - компараторы напряжения, в частности - микросхема К554СА3 [4, стр. 464], в которой на один из входов подано эталонное напряжение, а на второй - напряжение, поступающее с выхода приемника радиосигнала.
Передатчик радиосигналов (1) может быть рассмотрен на примере описания и структурной схемы, приведенных в [5], стр. 273, рис. 7.3.
В качестве триггера (27) формирователя радиосигналов (12) может быть использована микросхема К155ТМ2 [4, стр. 67].
Мультиплексор (28) может быть реализован на микросхеме К531КП11П [4, стр. 254].
Цифроаналоговый преобразователь (29) может быть реализован на микросхеме КР572ПА1 [4, стр. 466].
Способ реализации формирователей и передатчиков акустических сигналов (3,7 и 4,8) описан в [6], стр. 33, рис. 1.12б.
В [6] , стр. 33, на рис. 1.12а, приведена структурная схема приемной аппаратуры гидроакустического канала (9 и 15). В нашем случае вместо указанного на структурной схеме индикатора подсоединяется измеритель дальности (10 и 16).
Входящий в состав каждого из измерителей дальности генератор тактовых импульсов может быть реализован в виде микросхемы КР119ГГ1 [4, стр. 391]. В качестве счетчика (26) может быть использована микросхема К555ИЕ7 [4, стр. 285].
Вычислитель параметров причаливания (13) может быть реализован на базе центрального процессора 1806ВМ2 [7] . Схема подключения отдельных блоков вычислителя стандартна и приведена на фиг. 3. [7, стр. 211]. Вычисление параметров причаливания производится в центральном процессоре (21) под управлением программы, хранящейся в запоминающем устройстве команд (23), входящем в состав рассматриваемого центрального процессора [8, стр. 50]. Результаты вычислений, а также данные, поступающие в вычислительный блок от измерителей дальности, хранятся в запоминающем устройстве данных (24), пример реализации которого приведен в [8], стр. 61. Связь с блоком индикации параметров осуществляется через стандартный интерфейс (22), в частности, может быть использован интерфейс "СТЫК С2" [9]. В качестве блока индикации параметров (14) может быть использован алфавитно-цифровой дисплей типа 15ИЭ-00-013 [8, стр. 82].
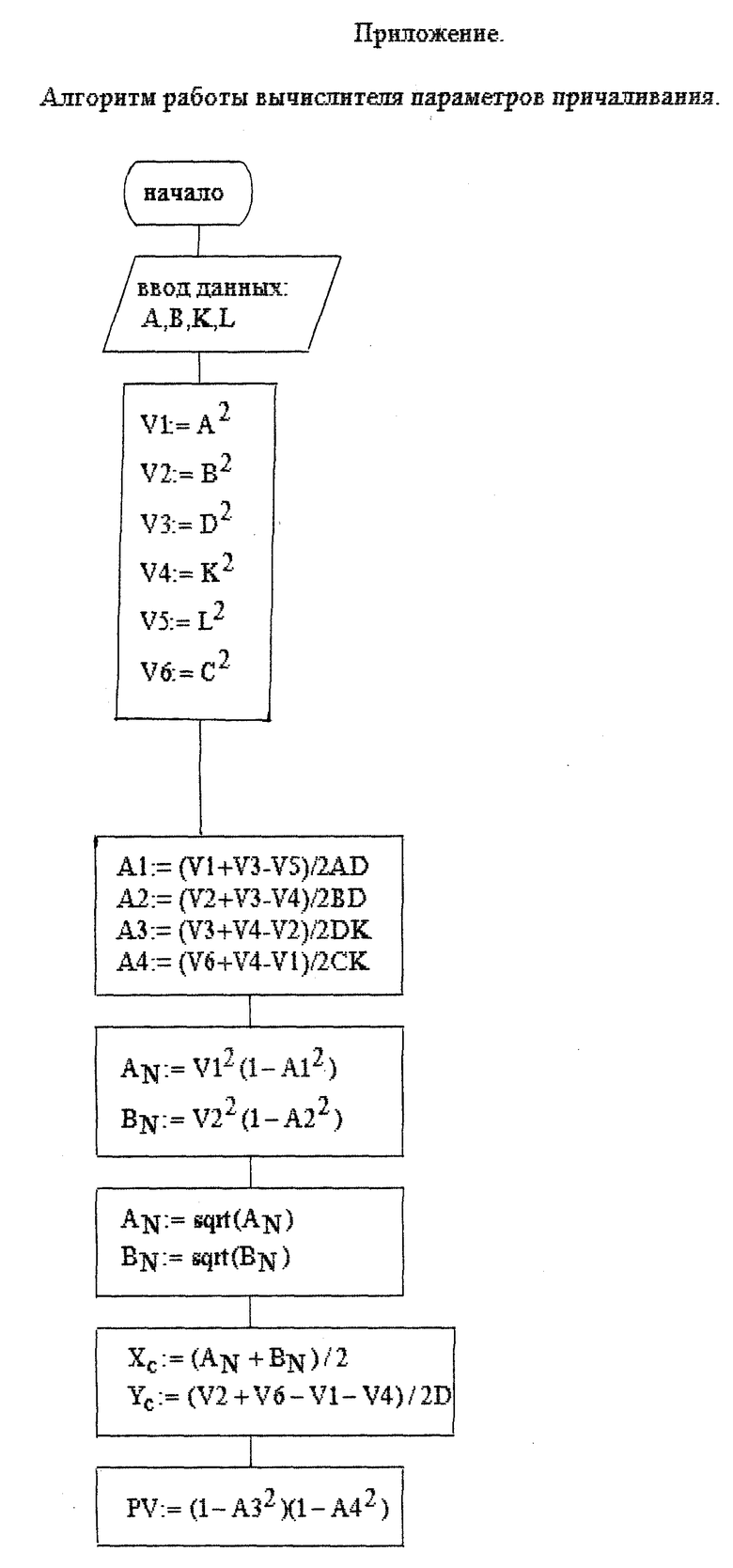
Вычисление параметров причаливания (угол причаливания γ, координаты геометрического центра объекта причаливания Xc, Yc, нормальные составляющие расстояний от реперных пунктов базы объекта причаливания до линии причала AN, BN) на основе измеренных значений дальностей между реперными пунктами базы объекта причаливания и реперными пунктами опорной базы причаливания A, B, K, L и заранее известных длины базы объекта причаливания C и длины опорной базы причаливания D производится по формулам (1) - (5). Для реализации этих вычислений в запоминающее устройство команд должна быть записана программа в кодах процессора. Алгоритм и программа вычисления параметров причаливания для одного цикла измерения приведена в приложении.
Как видно из описания структурной схемы системы причаливания и порядка ее работы, предлагаемая система причаливания решает поставленную техническую задачу, то есть в сравнении с известной системой причаливания [2] обладает:
почти вдвое более высоким быстродействием за счет использования для передачи запросного сигнала радиоканала со значительно большей (порядка 105) скоростью распространения сигналов;
повышенной точностью определения параметров причаливания за счет исключения использования пассивно переотраженных сигналов: активно излучаются как запросный радиосигнал, так и ответный акустический;
измерение дальностей и вычисление параметров производится в вычислителе, расположенном на борту объекта причаливания, что дает возможность использования полученных результатов в управлении процессом причаливания;
повышение быстродействия и использование только активно излученного акустического сигнала позволяет сохранить работоспособность системы причаливания вплоть до дальностей, приближающихся к нулю, то есть снять ограничения на минимальную дальность действия системы;
состав параметров причаливания расширяется за счет того, что измеряются расстояния между четырьмя реперными пунктами, на основании чего вычислитель может определить такие параметры, как угол причаливания, положение геометрического центра базы объекта причаливания, нормальные составляющие расстояний от реперных точек базы объекта причаливания до линии причала, скорости движения реперных точек друг относительно друга.
Источники информации:
1. Реферативный журнал "Изобретения стран мира". ВНИИПИ, 1991, N 3-4, вып. 95, патент США N 4884208, МКИ G 01 S 3/02, опубл. 28.11.89.
2. Судовые измерители скорости. Справочник /А.А.Хребтов, В.Н.Кошкарев, Б.А.Осюхин и др. - Л.: Судостроение, 1978.
3. Радиоприемные устройства. Под ред. А.П.Жуковского. - М.: Высшая школа, 1989.
4. Интегральные микросхемы: Справочник. Под ред. Б.В. Тарабрина. - М.: Энергоатомиздат, 1985.
5. Радиопередающие устройства. Учебник для высших учебных заведений. Под ред. В.В.Шахгильдяна. - М.: Радио и связь, 1990.
6. Справочник по гидроакустике/ А.П.Евтютов, А.Е.Колесников, Е.А.Коренин и др. - Л.: Судостроение, 1988.
7. Центральный процессор М2. Техническое описание и инструкция по эксплуатации. Эксплуатационные документы. 3.858.382 ТО. - ЦНИИ "Электроника", 1979.
8. МикроЭВМ: В 8 кн. Практ. пособие/Под ред. Л.Н. Преснухина. Кн. 1 Семейство ЭВМ "Электроника 60" / И.Л. Талов, А.Н.Соловьев, В.Д. Власенков. - М.: Высшая школа, 1988.
9. ГОСТ 18145 - 81. Цепи на стыке С2 аппаратуры передачи данных с оконечным оборудованием при последовательном вводе-выводе данных. Номенклатура и технические требования. М.: Издательство стандартов, 1992.
10. А.П. Евтютов, В.Б. Митько. Инженерные расчеты в гидроакустике. - Л.: Судостроение, 1988.
Приложение
Алгоритм работы вычислителя параметров причаливания приведен в конце текста.
Программа вычисления параметров причаливания написана в системе команд центрального процессора М2 микроЭВМ "Электроника 60" [7, стр.56]
MOV A, +(R6) *вычисление V1*
MOV A, +(R6)
FMUL
MOV(R6), V1
MOV B, +(R6) *вычисление V2*
MOV B, +(R6)
FMUL
MOV (R6), V2
MOV D, +(R6) *вычисление V3*
MOV D, +(R6)
FMUL
MOV (R6), V3
MOV K, +(R6)
MOV K, +(R6) *вычисление V4*
FMUL
MOV (R6), V4
MOV L, +(R6) *вычисление V5*
MOV L, +(R6)
FMUL
MOV (R6), V5
MOV C, +(R6) *вычисление V6*
MOV C, +(R6)
FMUL
MOV (R6), V6
MOV D, -(R6) *вычисление A1*
MOV A, -(R6)
MOV V5, -(R6)
MOV V3, -(R6)
MOV V1, -(R6)
FADD
FSUB
FDIV
FDIV
MOV (R6), A1
ASLAI
MOV D, -(R6) *вычисление A2*
MOV B, -(R6)
MOV V4, -(R6)
MOV V3, -(R6)
MOV V2, -(R6)
FADD
FSUB
FDIV
FDIV
MOV(R6), A2
ASL A2
MOV VI, -(R6) *вычисление AN*
MOV #1, -(R6)
MOV A1, -(R6)
MOV A1, -(R6)
FMUL
FSUB
FMUL
JSR R6, ADR
MOV (R6), NC
MOV V2, -(R6) *вычисление BN*
MOV #1, -(R6)
MOV A2, -(R6)
MOV A2, -(R6)
FMUL
FSUB
FMUL
JSR R6 ADR
MOV (R6), MD
MOV D, -(R6) *вычисление Yc*
MOV V1, -(R6)
MOV V4, -(R6)
MOV V2, -(R6)
MOV V5, -(R6)
FADD
FSUB
FSUB
FDIV
MOV (R6), YC
ASL YC
MOV NC, -(R6) *вычисление Xc*
MOV MD, -(R6)
FADD
MOV (R6), XC
ASLXC
MOV D, -(R6) *вычисление A3*
MOV К, -(R6)
MOV V2, -(R6)
MOV V3, -(R6)
MOV V4, -(R6)
FADD
FSUB
FDIV
FDIV
MOV(R6), A3
ASLA3
MOV C, -(R6) *вычисление A4*
MOV K, -(R6)
MOV V1, -(R6)
MOV V6, -(R6)
MOV V4, -(R6)
FADD
FSUB
FDIV
FDIV
MOV (R6), A4
ASLA4
MOV #1, -(R6) *вычисление PV*
MOV A3, -(R6)
MOV A3, -(R6)
FMUL
FSUB
MOV #1, -(R6)
MOV A4, -(R6)
MOV A4, -(R6)
FMUL
FSUB
FMUL
JSR R6, ADR
MOV (R6),PV
MOV PV, -(R6) *вычисление UG*
MOV A3, -(R6)
MOV A4, -(R6)
FMUL
FADD
MOV (R6), B
MOV B, -(R6) *вычисление arcCos*
MOV B, -(R6)
FMUL
MOV (R6), BO
MOV #6, -(R6)
MOV B, -(R6)
MOV DQ, -(R6)
FMUL
FDIV
MQV (R6), B2
MOV #20, -(R6)
MOV #9, -(R6)
MOV BQ, -(R6)
MOV B2, -(R6)
FMUL
FMUL
FDIV
MOV (R6), B3
MOV #42, -(R6)
MOV #25, -(R6)
MOV BQ, -(R6)
MOV BЗ, -(R6)
FMUL
FMUL
FDIV
MOV (R6), B4
MOV #72, -(R6)
MOV #49, -(R6)
MOV BQ, -(R6)
MOV B4, -(R6)
FMUL
FMUL
FDIV
MOV (R6), B5
MOV B, -(R6)
MOV B2, -(R6)
MOV B3, -(R6)
MOV B4, -(R6)
MOV B5, -(R6)
MOV #1.57, -(R6)
FSUB
FSUB
FSUB
FSUB
FSUB
MOV (R6), UP
ADR MOV (R6), Q *вычисление квадратного корня*
DEC Q
MOV Q, Q2
ASL Q2
MOV Q2, Q3
ASL Q3
ASL Q3
NEG Q3
MOV Q3, Q4
ASL Q4
NEG Q4
MOV #3, -(R6)
MOV Q4, -(R6)
FMUL
MOV (R6), Q5
ASL Q5
ASL Q5
ASL Q5
NEG Q5
MOV #10, -(R6)
MOV #7, -(R6)
MOV Q5, -(R6)
FMUL
FDIV
MOV (R6), Q6
NEG Q6
MOV #1, -(R6)
MOV Q6, -(R6)
MOV Q5, -(R6)
MOV Q4, -(R6)
MOV Q3, -(R6)
MOV Q2, -(R6)
MOV Q, -(R6)
FADD
FADD
FADD
FADD
FADD
FADD
RTS*
Система причаливания надводных объектов относится к области радиолокации и радионавигации, в частности к системам определения местоположения движущихся объектов. Задачей, решаемой изобретением, является повышение быстродействия и точности определения параметров причаливания, расширение состава параметров причаливания и использование их в управлении процессом швартовки, снижение минимальной дальности действия по отношению к известным системам. В состав системы причаливания надводных объектов входят два реперных пункта опорной базы причаливания, на каждом из которых установлены последовательно соединенные приемник радиосигналов, дешифратор радиосигналов, формирователь акустического сигнала и передатчик акустического сигнала. Кроме того, система содержит расположенные на объекте причаливания два приемника акустического сигнала, соединенные с измерителями дальности, формирователь радиосигналов и передатчик радиосигналов, вычислитель параметров причаливания и блок индикации, причем приемники акустических сигналов расположены на реперных пунктах базы объекта причаливания. 5 ил.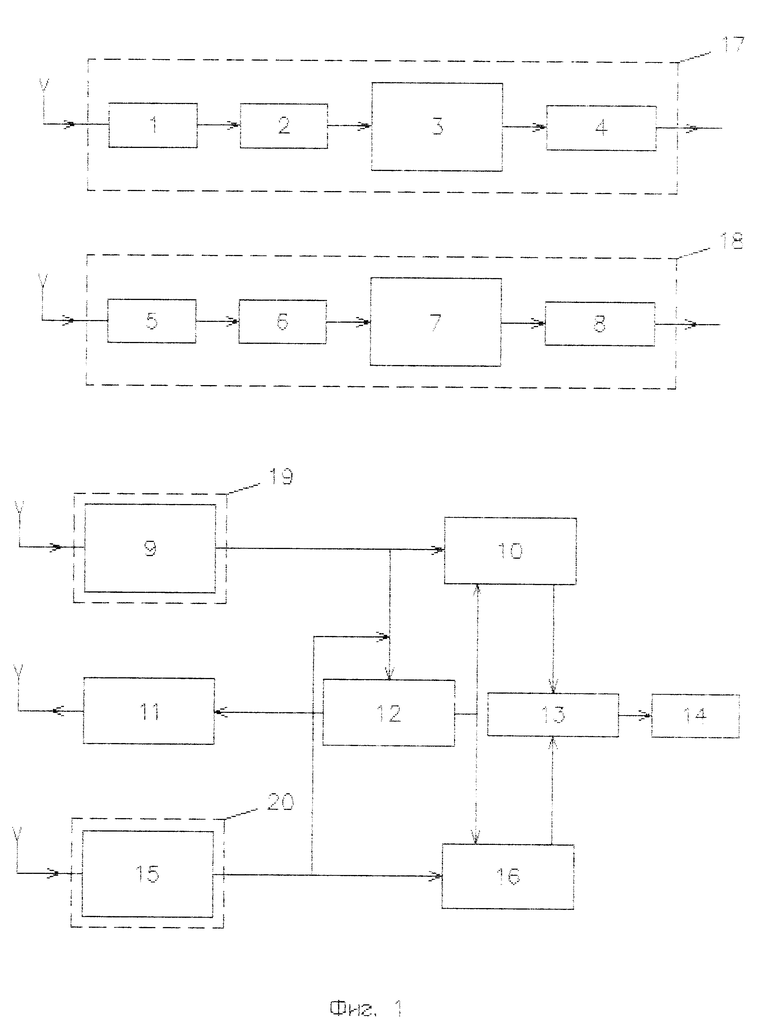
Система причаливания надводных объектов, содержащая последовательно соединенные и расположенные на первом реперном пункте опорной базы причаливания первый формирователь акустического сигнала и первый передатчик акустического сигнала, последовательно соединенные и расположенные на втором реперном пункте опорной базы причаливания второй формирователь акустического сигнала и второй передатчик акустического сигнала, первый и второй измерители дальности, выходы которых соединены с соответствующими входами вычислителя, выход которого связан со входом блока индикации, первый и второй приемники акустического сигнала, отличающаяся тем, что в систему введены последовательно соединенные и установленные на первом реперном пункте опорной базы причаливания первый приемник радиосигнала и первый дешифратор, выход которого соединен со входом первого формирователя акустического сигнала, последовательно соединенные и установленные на втором реперном пункте опорной базы причаливания второй приемник радиосигнала и второй дешифратор,
выход которого соединен со входом второго формирователя акустического сигнала, последовательно соединенные и расположенные на объекте причаливания формирователь радиосигналов и передатчик радиосигналов, причем первый вход первого измерителя дальности соединен с выходом первого приемника акустического сигнала, а второй - с выходом формирователя радиосигналов, первый вход второго измерителя дальности соединен с выходом второго приемника акустического сигнала, а второй - с выходом формирователя радиосигналов, вход формирователя радиосигналов соединен с выходами первого и второго приемников акустического сигнала, первый и второй измерители дальности, вычислитель и блок индикации расположены на объекте причаливания, первый и второй приемники акустического сигнала расположены соответственно на первом и втором реперных пунктах базы объекта причаливания.
| Судовые измерители скорости | |||
| / Справочник | |||
| А.А.Хребтов, В.Н.Кошкарев, Б.А.Осюхин и др | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| - Л.: Судостроение, 1978. | |||
