Изобретение относится к области полетного контроля датчиков угловых скоростей (ДУС), входящих в состав систем автоматического управления (САУ) современных летательных аппаратов (ЛА). Наибольшее значение оно имеет для построения систем встроенного бортового контроля САУ, не содержащих избыточных ДУС и обладающих высокой достоверностью обнаружения отказа и исправности ДУС, при минимальном весе и габаритах контролирующего устройства.
Известен способ контроля гироскопических датчиков ориентации САУ по соответствию питающих напряжений, подводимых к датчику, их номинальным значениям [1, с. 102-105; 2, с.26, 42] При этом предполагается исправная работа контролируемого датчика ориентации, если питающие напряжения или токи в фазах не выходят за пределы поля допуска. Контроль реализуется в различных устройствах контроля с помощью пороговых элементов, реле или электродвигателя с возвратной пружиной, включенных в цепи питания проверяемого датчика ориентации. Наибольшее применение на современных пассажирских самолетах нашло устройство, контролирующее падение напряжения и обрыв в трехфазной цепи переменного тока и обрыв цепи постоянного тока и называемое сигнализатор нарушения питания (СНП). Для оценки степени совершенства этого и последующих сравниваемых устройств контроля ДУС рассмотрим вероятности получения ими правильного результата контроля, то есть достоверности обнаружения состояния "исправен" Pдi(и) и "отказ" Pдi(о) по известным формулам [3, с. 77, 78]
где PДУС=0,934578;
QДУС= 1-PДУС соответственно надежность и вероятность отказа ДУС на 500 ч работы при среднем времени его наработки на отказ Tср.ДУС=7390 ч [4-6]
Pл1= 1-PСНП вероятность ложных отказов устройства, определяемая через надежность СНП PСНП=0,992528 при Tср.СНП=67700 ч;
Pн1= 0,062145 вероятность необнаруженного отказа ДУС за 500 ч работы, если СНП способен зафиксировать только короткое замыкание обмотки гиромотора [4, 5]
Весовой показатель качества устройства СНП определим по отношению
где σСНП, σДУС соответственно вес (кг) контролирующего устройства СНП и проверяемого ДУС [2]
Преимуществом подобных СНП устройств контроля является надежность, простота реализации, сравнительно малые вес, габариты, энергопотребление, иногда возможность размещения в корпусе контролируемого датчика. К недостаткам, следует отнести невозможность обнаружения отказов сигнальных, коррекционных цепей и, что самое главное, косвенный характер контроля, не учитывающий измеряет ДУС полезный сигнал ориентации или нет, что отражено в низких значениях достоверности контроля (1), (2).
Известны устройства типа БСН, БКК, БАП для полетного контроля ДУС, содержащие кворум-элемент и три компаратора [1, с. 140; 2, с. 38, 122] Устройство предназначено для одновременного контроля не менее трех одинаковых ДУС и выдачи сигнализации об отказе одного из них при отличии его показаний от двух других. При этом входы первого, второго и третьего компараторов соединены с выходами соответственно первого, второго и третьего ДУС и выходом кворум-элемента, три входа которого также соединены с выходами ДУС. Компараторы осуществляют сравнение выходных сигналов каждого ДУС с осредненным сигналом всех трех ДУС, получаемым на выходе кворум-элемента. Достоверность обнаружения состояния "исправен" Pд2(и) и "отказ" Pд2 (о) ДУС в этом устройстве составляет
где Pл2= 1-PБКК•P
Pн2=0,01751 вероятность необнаруженного отказа ДУС при неисправности его датчика момента [2, с.14; 4; 5]
Весовой показатель качества рассмотренного аналога БКК определяется по формуле
где σБКК вес блока контроля типа БКК в полном комплекте (3,8 кг) и без рамы и резервной части (1,15 кг).
Обладая весьма высокой достоверностью (4) обнаружения состояния исправности, устройство с кворум-элементом недостаточно надежно (5) выявляет отказ именно контролируемого ДУС, что обусловлено высокой вероятностью Pл2 возникновения отказов в самом устройстве контроля. Для работы устройства необходимо наличие в системе избыточных ДУС, как минимум троекратно увеличивающих вес, габариты и энергопотребление. Весовой показатель качества (6) имеет очень большое значение, указывая на более чем десятикратное превышение веса аппаратуры контроля по сравнению с весом проверяемого ДУС.
Известно устройство типа БКВГ для полетного контроля блока демпфирующих гироскопов БДГ-26, включающего три идентичных ДУС [2, с. 14; 7] Устройство контроля содержит три импульсных трансформатора, первичные обмотки которых включены в трехфазные цепи питания гиромоторов, а вторичные обмотки подключены к входам логической схемы И на трех последовательно включенных транзисторах. Выход схемы через транзисторный компаратор подключен к реле, нормально замкнутые контакты которого выдают сигнал "исправность БДГ". Устройство осуществляет контроль скорости вращения гиромотора по совпадению моментов возникновения импульсов во вторичных обмотках всех трех трансформаторов. Контроль основан на предположении, что хотя бы один из трех гиромоторов исправен и сообщает через трансформатор правильную последовательность и частоту импульсов. Сравниваемые характеристики достоверностей контроля ДУС этим устройством имеют значения
где Pл3= 1-PБКВГ вероятность ложных отказов устройства контроля, содержащего собственно БКВГ (PБКВГ=0,972257) и два дополнительных ДУС, необходимых для его работы;
Pн3= 0,037922 вероятность возникновения необнаруженного отказа ДУС из-за отказов потенциометра, датчика момента, противодействующих пружин и др. элементов [2, с.14; 4; 5] не влияющих на последовательность и частоту контролируемых импульсов.
Устройство БКВГ обладает несколько лучшим весовым показателем в 2,5 раза меньшим, чем у БКК. Достоверность (7) обнаружения исправного состояния ДУС здесь, как и для СНП, много меньше, чем у БКК, но достоверность (8) обнаружения отказа соизмерима. Это объясняется сравнительно низкой надежностью устройств контроля БКК и БКВГ из-за необходимости включения в их состав двух дополнительных контролирующих ДУС, собственная надежность которых равняется надежности проверяемого прибора. Избыточность ДУС определяет и значительный вес БКК и БКВГ более чем четырехкратно (см. (6), (9)) превышающий вес самого проверяемого прибора.
в 2,5 раза меньшим, чем у БКК. Достоверность (7) обнаружения исправного состояния ДУС здесь, как и для СНП, много меньше, чем у БКК, но достоверность (8) обнаружения отказа соизмерима. Это объясняется сравнительно низкой надежностью устройств контроля БКК и БКВГ из-за необходимости включения в их состав двух дополнительных контролирующих ДУС, собственная надежность которых равняется надежности проверяемого прибора. Избыточность ДУС определяет и значительный вес БКК и БКВГ более чем четырехкратно (см. (6), (9)) превышающий вес самого проверяемого прибора.
Наиболее близким к заявляемому устройству по технической сущности является устройство контроля блока демпфирующих гироскопов БДГ-25, включающего только два идентичных ДУС [2, с.14; 7] Устройство контроля подобно БКВГ и содержит два импульсных трансформатора, первичные обмотки которых включены в трехфазные цепи питания гиромоторов, а вторичные обмотки подключены к входам логической схемы И на двух последовательно включенных транзисторах. Выход схемы, через транзисторный компаратор, подключен к реле, нормально замкнутые контакты которого выдают сигнал "исправность БДГ". Устройство осуществляет контроль только скорости вращения гиромотора по совпадению моментов возникновения импульсов во вторичных обмотках обоих трансформаторов. Контроль основан на предположении, что наиболее вероятным является отказ именно гиромотора ДУС и хотя бы один из двух гиромоторов проверяемого или проверяющего ДУС исправен и сообщает устройству правильную последовательность и частоту импульсов. Устройство содержит всего лишь один избыточный ДУС. Это обеспечивает большую достоверность обнаружения отказа проверяемого датчика, при меньших весе и габаритах устройства контроля
где Pл4 0,048495 вероятность ложных отказов устройства контроля;
Pн4 0,037922 вероятность необнаруженного отказа.
Уменьшение числа избыточных ДУС и соответствующее упрощение устройства контроля, выбранного за прототип, отразилось на уменьшении вероятности Pл4 ложных отказов по сравнению с аналогичным показателем БКВГ. В то же время, вероятность Pн4 необнаруженных отказов осталась неизменной, так как ее величина зависит от глубины контроля ДУС, а в прототипе и устройстве БКВГ она неизменна. Весовой показатель качества здесь определяется из отношения
где σБДГ-25 1,5 кг вес блока демпфирующих гироскопов БДГ-25.
Обладая наибольшей достоверностью Pд4(о) обнаружения отказа, устройство, выбранное за прототип, имеет меньшую достоверность Pд4(и) обнаружения исправного состояния ДУС, чем у БКК. Однако его весовой показатель качества g4 уступает лишь показателю g1 простейшего устройства контроля СНП с низкими достоверностями Pд1(о) и Pд1(и) и значительно лучше, чем у БКК.
Целью настоящего изобретения является повышение достоверности обнаружения отказа и исправности ДУС при минимальном весе и габаритах контролирующего устройства, не содержащего избыточных ДУС.
Поставленная цель достигается тем, что в известное устройство-прототип для полетного контроля ДУС, содержащее компаратор, введены последовательно соединенные фильтр высокочастотных колебании угловой скорости, вход которого подключен к сигнальному выходу ДУС, и измеритель амплитуд этих колебаний, выход которого соединен с входом компаратора.
Сущность изобретения заключается в проверке наличия выходного сигнала ДУС, пропорционального незатухающим высокочастотным колебаниям угловой скорости ЛА, спектральные характеристики которых постоянны и заранее известны для данного типа самолета. Выделение контролируемых высокочастотных колебаний во всем спектре изменения угловой скорости ЛА осуществляет фильтр, подключенный к выходу ДУС и подавляющий низкочастотные (менее ≈ 0,1-1 Гц) колебания угловой скорости, обусловленные управляющими воздействиями на ЛА. Измеритель амплитуд высокочастотных колебаний совместно с компаратором оценивают средний уровень колебаний угловой скорости, измеренных исправным ДУС. Уменьшение или значительное увеличение сигнала, пропорционального незатухающим высокочастотным колебаниям угловой скорости самолета, из-за отказа ДУС приводит к обнулению или значительному увеличению сигнала на выходе измерителя амплитуд и срабатыванию двухпорогового компаратора, фиксирующего отказ контролируемого датчика.
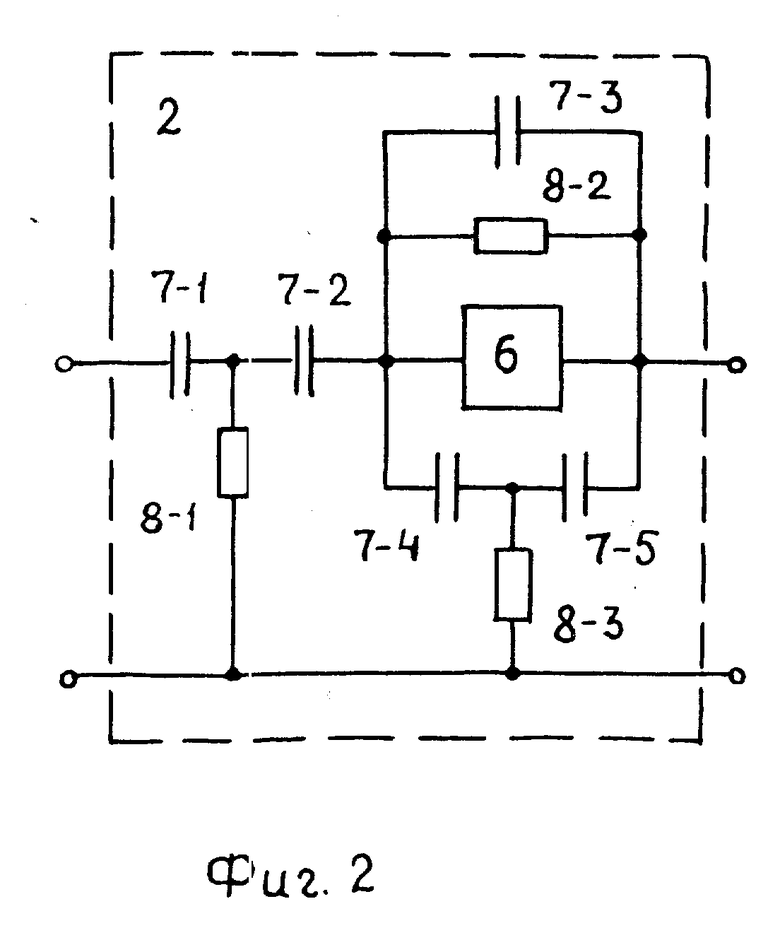
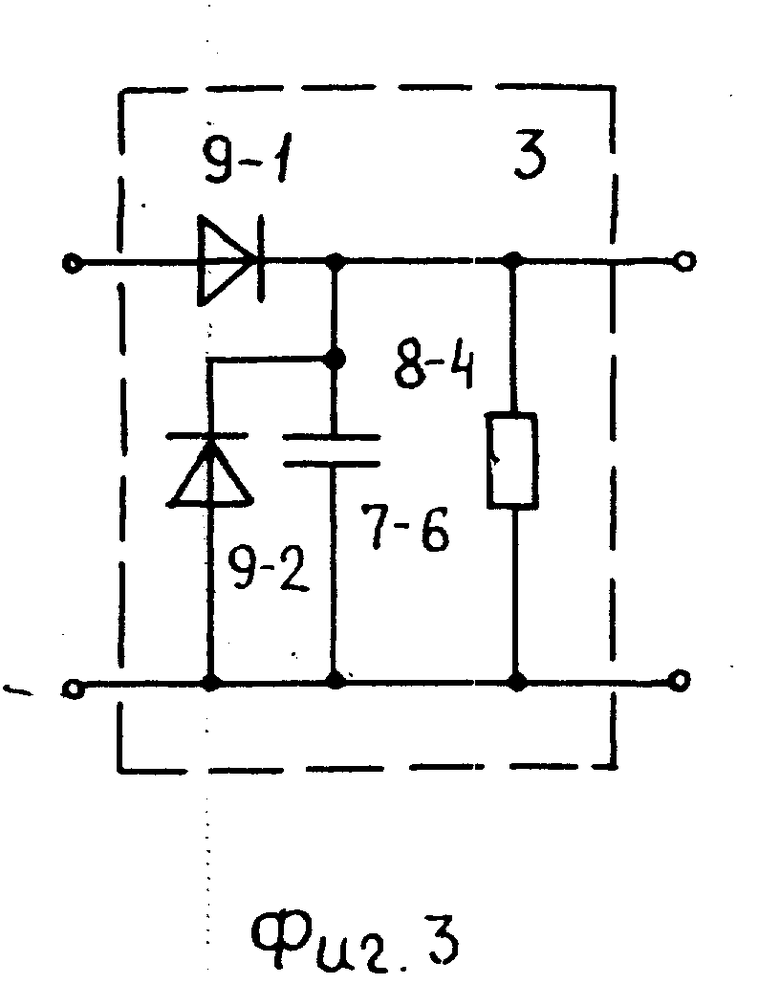
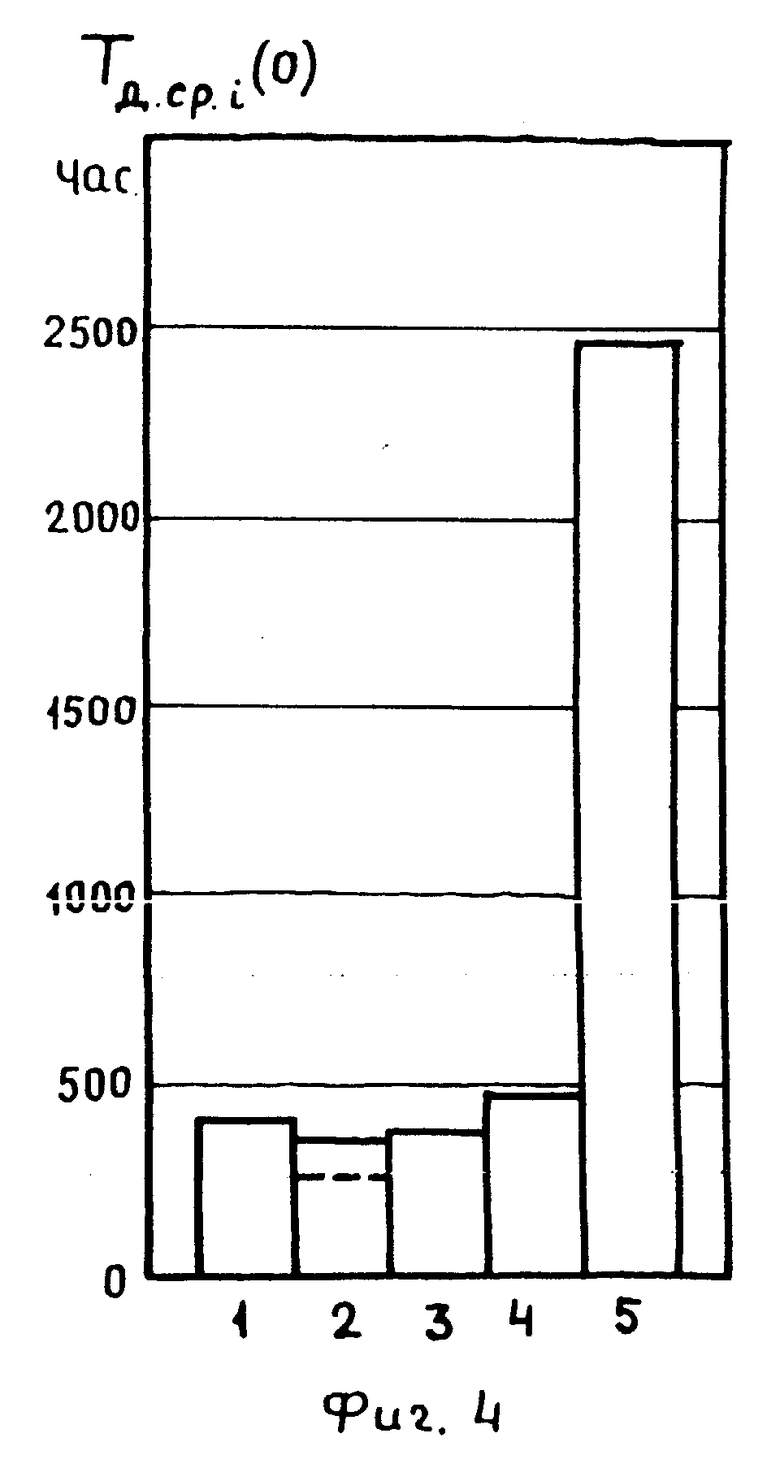
На фиг. 1 показана блок-схема предлагаемого устройства для полетного контроля датчика угловой скорости, где приняты следующие обозначения: 1 - датчик угловой скорости, 2 фильтр высокочастотных колебаний угловой скорости, 3 измеритель амплитуд, 4 компаратор, 5 устройство полетного контроля датчика угловой скорости; на фиг. 2 структурная схема возможной практической реализации фильтра 2 высокочастотных колебаний угловой скорости [8, с. 156] где приняты обозначения: 6 микросхема, например 140 УД7, 7-1,7-5 конденсаторы, 8-1,8-3 резисторы; на фиг. 3 структурная схема возможной практической реализации измерителя 3 амплитуд высокочастотных колебаний, построенного на детекторе-накопителе [9, с. 151, 152, рис. 4.50] где приняты обозначения: 9-1,9-2 детекторы, 7-6 конденсатор, 8-4 - резистор; на фиг. 4 показаны сравниваемые значения среднего времени Tд.ср.i(о) достоверного обнаружения состояния "отказ" ДУС
TД.ср.i(о)=-500/lnPдi(о); (13)
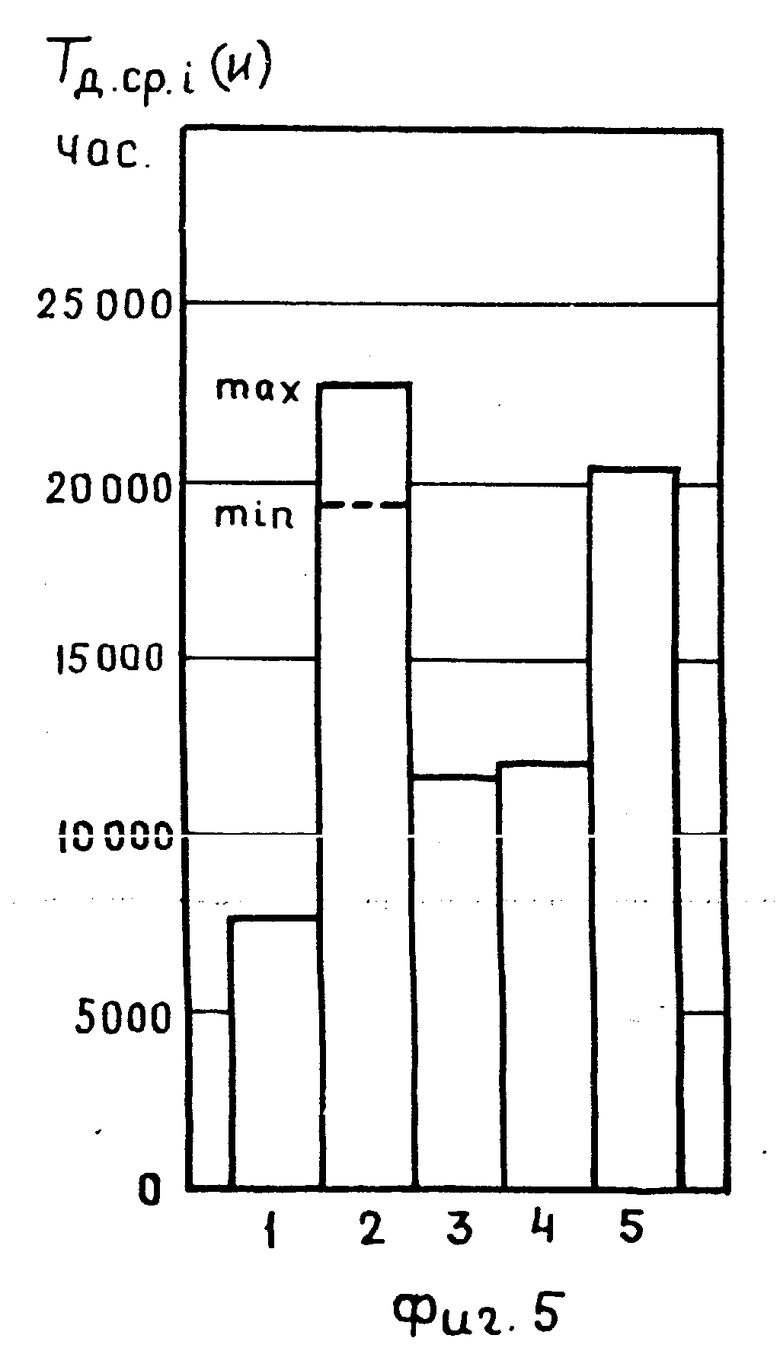
на фиг. 5 сравниваемые значения среднего времени Tд.ср.i(и) достоверного обнаружения состояния "исправен" ДУС
Tд.ср.i(и) -500/lnPдi(и); (14)
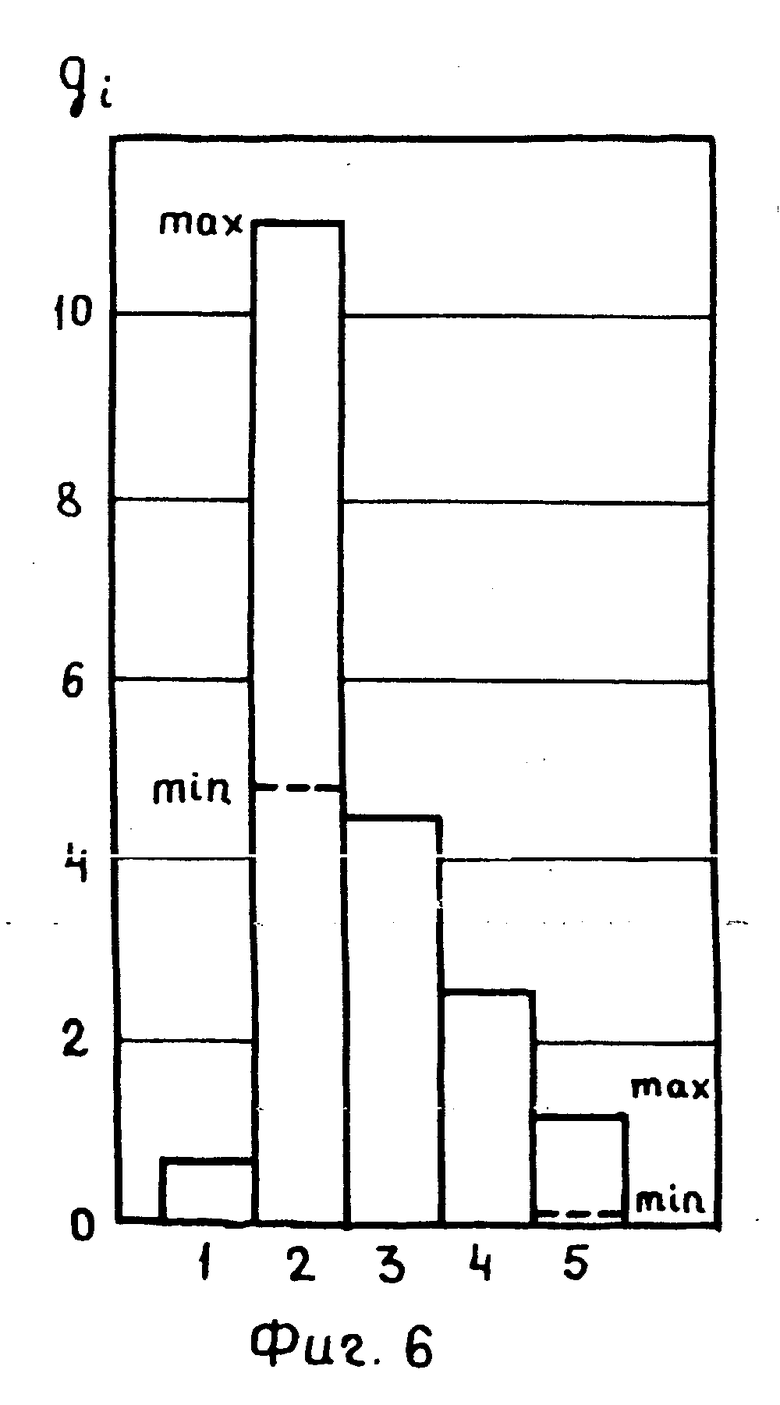
на фиг. 6 сравниваемые значения весового показателя gi качества, характеризующего во сколько раз вес устройства контроля превышает вес проверяемого ДУС.
На фиг. 4 6 по оси абсцисс указаны номера следующих сравниваемых устройств контроля: 1 СНП; 2 БКК; 3 БДГ-26; 4 БДГ-25 (прототип); 5 - предлагаемое устройство. Для БКК и предлагаемого устройства показаны минимальные (min) и максимальные (max) значения сравниваемых показателей.
Устройство для полетного контроля датчика 1 угловой скорости содержит последовательно соединенные фильтр 2 высокочастотных колебаний угловой скорости, вход которого подключен к сигнальному выходу датчика 1 угловой скорости, и измеритель 3 амплитуд этих колебаний, выход которого соединен с входом компаратора 4.
Устройство для полетного контроля датчика 1 угловой скорости работает следующим образом. Сигнал с выхода контролируемого датчика 1 угловой скорости поступает на вход фильтра 2 высокочастотных колебаний. Фильтр 2 подавляет низкочастотные (приблизительно до 0,1-1 Гц) составляющие сигнала и беспрепятственно пропускает высокочастотные составляющие на измеритель 3. Тем самым устраняется влияние на последующий измеритель 3 амплитуд медленно изменяющегося сигнала, пропорционального угловой скорости самолета от управления летчиком. Прошедший фильтр 2 высокочастотный сигнал пропорционален незатухающим короткопериодическим колебаниям угловой скорости самолета от турбулентных возмущений, малых отклонений рулей и упругих колебаний конструкции [10, с.19; 11, с.182] Измеритель 3 амплитуд этих колебаний совместно с компаратором 4 оценивают уровень амплитуд колебаний угловой скорости. При длительном пропадании сигнала, пропорционального высокочастотным колебаниям, или его недопустимо большом возрастании выходной сигнал измерителя 3 выходит за порог срабатывания компаратора 4 и последний выдает сигнал, указывающий на отказ ДУС.
Возможная практическая реализация фильтра 2 высокочастотных колебаний угловой скорости показана на фиг. 2 и включает распространенную микросхему 140УД7. Реализация измерителя 3 амплитуд высокочастотных колебаний показана на фиг. 3. Компаратор 4 может строиться на микросхеме 521СА1 [12, с.174] Реализация всего устройства 5 возможна и программными средствами [13, с. 169] на БЦВМ.
Предлагаемое устройство для полетного контроля ДУС имеет наибольшую достоверность обнаружения отказа
где Pл5 0,009495 вероятность ложных отказов заявляемого устройства контроля, обусловленная неисправностями его микросхемной реализации;
Pн5 0,023055 вероятность необнаруженного отказа ДУС из-за неисправностей в неконтролируемых элементах его конструкции [4, 5]
Наименьшее и наибольшее значения весового показателя качества (см. фиг. 6).

определены с учетом минимального (≈ 50 г) и максимального (≈ 500 г) веса предлагаемого устройства в микросхемном исполнении [7, 14, 15]
Таким образом, эффективность обнаружения состояния "отказ" ДУС для предлагаемого устройства в 5 раз выше, а состояние "исправен" ДУС в 1,7 раза выше, чем в прототипе БДГ-25 (см. фиг. 4, 5). Весовой показатель в 2,14-21 раз меньше, чем в прототипе (фиг. 6). Габариты устройства минимальны и соизмеримы с размерами ДУС. Предлагаемое устройство контроля, обладая повышенной достоверностью обнаружения отказа и исправности, не требует установки на борт ЛА избыточного числа приборов. Его стоимость минимальна, а наибольшие перспективы применения связаны с созданием бортовых экспертных систем полетного контроля САУ ЛА.
Источники информации
1. Михайлов О.И. Козлов И.М. Гергель Ф.С. Авиационные приборы. -М. Машиностроение, 1977, с. 102-105; 112-113.
2. Алтухов В.Ю. Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация: Учеб. пособие. М. Машиностроение, 1991, с.26, 42.
3. Разумный В. М. Толченов О.В. Оценка работоспособности устройств автоматики. -М. Энергия, 1977, с.77, 78.
4. Половко А.М. Основы теории надежности. -М. Наука, 1964, с.414.
5. Чембровский О.А. Топчеев Ю.И. Самойлович Г.В. Общие принципы проектирования систем управления. -М. Машиностроение, 1972, с.340-341.
6. Boudreau Jean A. Integrated flight control system design for CCV. AIAA Pap. 1976, N 941, 1-14.
7. Блок демпфирующих гироскопов БДГ-25 и БДГ-26. Техническое описание и инструкция по эксплуатации.
8. Статистическое моделирование динамических систем средствами АВТ. Под ред. И.М. Витенберга. -М. Машиностроение, 1976, с.156.
9. Автоматическая аппаратура контроля радиоэлектронного оборудования (вопросы проектирования). Под ред. Н.И. Пономарева. -М. Сов. радио, 1975, с. 151, 152.
10. Пашковский И.М. Особенности устойчивости и управляемости скоростного самолета. -М. Воениздат, 1961, с.19.
11. Боднер В. А. Системы управления летательными аппаратами. -М. Машиностроение, 1972, с.182.
12. Алексенко А.Г. Коломбет Е.А. Стародуб Г.И. Применение прецизионных аналоговых ИС. -М. Радио и связь, 1981, с.144.
13. Лебедев А.Н. Моделирование в научно-технических исследованиях. -М. Радио и связь, 1989, с.169.
14. Компоновка и конструкции микроэлектронной аппаратуры: Справ. пособие. /Под ред. Б.Ф. Высоцкого, В.Б. Пестрякова, О.А. Пятлина. -М. Радио и связь, 1982, с.16.
15. Аналоговые и цифровые интегральные микросхемы: Справ. пособие. /Под ред. С.В. Якубовского. -М. Радио и связь, 1984, с.44.
Изобретение относится к области полетного контроля датчиков угловых скоростей, входящих в состав систем автоматического управления летательных аппаратов. Технический результат заключается в повышении достоверности обнаружения отказа и исправности датчиков угловых скоростей при минимальном весе и габаритах контролирующего устройства. Сущность изобретения заключается в проверке наличия выходного сигнала датчиков угловых скоростей, пропорционального незатухающим высокочастотным колебаниям летательного аппарата с помощью фильтра, измерителя амплитуд и компаратора. 6 ил.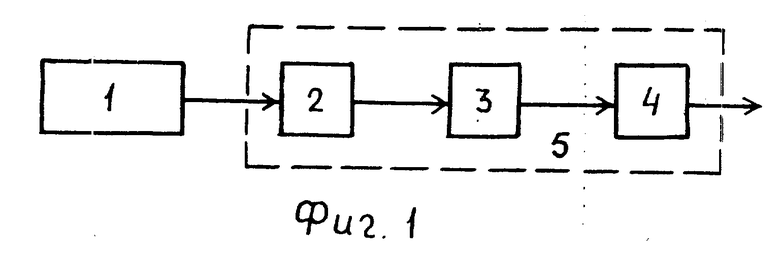
Устройство для полетного контроля датчика угловой скорости летательного аппарата, содержащее компаратор, отличающееся тем, что в него введены последовательно соединенные фильтр высокочастотных колебаний выходного сигнала датчика угловой скорости, вход которого поключен к сигнальному выходу датчика угловой скорости, и измеритель амплитуд и временных интервалов между сигналами этих колебаний, выход которого соединен с входом компаратора.
| Алтухов В.Ю., Стадник В.В | |||
| Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация | |||
| - М.: Машиностроение, 1991, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
